
Abstract
SOC is a crucial parameter in battery management systems (BMS), indicating the remaining amount of charge in a battery. Longer battery life and the removal of catastrophic battery damage are the results of accurate SOC assessment. Furthermore, it is crucial to have a dependable and precise estimation of SoC for an effective EV operation. Therefore, the lithium battery represents a characteristic nonlinear system, as well as the Extended Kalman Filter (EKF) algorithm proves to be a viable approach for SOC estimation. It is necessary to develop a new model called Modified EKF for SOC estimate based on EKF and KF in order to improve the stability and accuracy of the anticipated SOC. In this instance, the statistical cumulative error is utilized to determine the SOC using the Extended Kalman filter. Higher-order statistical characteristics including homogeneity, skewness, kurtosis, contrast, and entropy are taken into consideration in order to calculate the error involved in the estimation of SOC. Here, the suggested plan is to be simulated in MATLAB, and the temporal efficacy of the suggested approach is verified. The estimated Modified-EKF MAE is 0.2681%, the estimated SoC error RMSE is 0.34051%, and the estimated MSE is 0.11595%.
.Introduction
Rechargeable battery-based large-scale energy storage has been recognized as one of the well-liked options for electrical energy storage for several reasons. This is due to their great energy efficiency, convenience of siting, quick responsiveness to energy demand, and ability to balance demand as well as supply in power networks. These qualities of high energy density, low weight, extended cycle life, and lack of memory effect have led to a rise in interest in this field of study in both industry and academia [1]. A BMS is necessary because LiBs are the main energy storage system for smart grids and electrical vehicles [2]. To ensure a safe and effective operation, the BMS meticulously shows the battery states, including SOC, SOH, and cell capacity [3, 4]. The percentage of capacity left in the battery’s maximum usable capacity is a clear definition of the battery’s state of charge (SOC).
This surge in popularity as a subject of research is evident in both industrial and academia because of the characteristics of high energy density, less weight, longer cycle life and no memory effect [1]. LiBs serve as the primary energy storage system for electrical vehicles [2] as well as smart grid systems; hence the need for a BMS. The BMS carefully displays the battery states, such as SOC, SOH and cell capacity to ensure a safe and efficient operation [3, 4]. The battery SOC is well-defined as the percentage of the remaining capacity left in its maximum available capacity [5, 6]. The SOC stands as a pivotal element demanding effective management by the BMS. This is crucial as it employs the residual capacity function to assess the performance of LiBs [7]. Nevertheless, the SOC is not directly measurable, underscoring the necessity for precise models capturing battery dynamics.
The models employed to depict LiBs are the EMs, DDMs and ECMs. The EM model uses complex partial derivative equations and boundary conditions in describing the electrochemical process that takes place within the cell by giving detailed insight on the chemical reaction responsible for the internal parameter generation and dynamic behavior during different operating conditions [8]. These models are known to be highly accurate [9], but for them to be used efficiently, thorough knowledge of the battery chemicals structure as well as characteristics must be precisely determined [10]. In DDMs, the battery model is derived by training a large set of measured data without requiring information on the cell characteristics [11]. Equivalent circuit models consist largely of voltage sources, resistors and capacitors that are used for describing the behavior of the LiB [12]. Though ECMs do not provide information about the electrochemical reactions that take place within the battery, they should be adopted due to easy implementation, low number of parameters to tune, and low complexity in setting up their state equations [8, 13].
The KF method generally has good path-tracking performance and high accuracy, which is an effective online SOC estimation method [14, 15]. Furthermore, the KF method can be utilized for estimating the SOC in various dynamic models of lithium-ion batteries. Therefore, the nonlinear Kalman filter algorithms, such as the extended Kalman filter algorithm and sigma point Kalman filter algorithm, are applied to estimate the SOC of the battery [16, 17]. There are restrictions for EVs when using the internal resistance approach, which uses DC internal resistance. Additionally, bookkeeping estimation techniques are indirect techniques that produce significant estimation error and disturbance since they are open-loop and dependent on the present sensor, which is challenging to attain. However, the accuracy of hybrid and adaptive neural network-based approaches is affected by their complexity, which calls for a substantial volume of calculations and training data. Using an appropriate method for precise SOC estimate is required to ensure low estimation error and good EVB performance in order to overcome all of these limitations.
The main contributions of this research are given below:
Develop a brand-new method for calculating SOC called the statistical cumulative error based-Modified Extended Kalman Filter (MEKF) approach. To determine the error involved in the estimation of SOC, higher-order statistical variables including kurtosis, skewness, contrast, entropy, correlation, and homogeneity are taken into account. In terms of estimating error, the RMSE is 0.41203%, the projected MSE is 0.16977%, and the mean absolute error (MAE) of the prevailing P1 is 0.3352%. The estimated calculated SoC error RMSE is 0.34051%, the estimated MSE is 0.11595%, and the estimated MAE of Modified-EKF is 0.2681%. As a result, the modified EKF estimates SOC more accurately than the standard P1. By reducing the estimation error, the suggested model based on MATLAB/Simulink produces simulation results that converge quickly and have a high degree of accuracy and efficacy.
The organization of the research is outlined as: Section 2 provides commentary on prevailing techniques. Section 3 describes Battery Management System Modelling Based on SoC Estimation and Section 4 describes the adopted modified extended Kalman filter for estimating SoC. Section 5 enlightens the consequences of the executed method and Section 6 guidelines the paper’s conclusion.
.Related works
(a) EKF and IEKF model
To improve the stability and accuracy of SOC estimation, Suwarna Santosh Shete, et al. [18] in 2023 developed an adaptive EKF based on KF and EKF. In the proposed approach, SoC estimation is conducted using the EKF, with the cumulative error determined by a novel mathematical model derived from historical battery SoC data. Hence, investigation outcomes demonstrated that the developed estimation approach reduces the estimation error, leading to a precise SOC.
2014, Carlo Taborelli and Simona Onori [19] have suggested a model-based technique to solve the problem of battery state of charge estimation. It uses a battery produced by All Cell Technologies that has undergone experimental validation and is designed specifically for light electric vehicles. Using data from the online innovation analysis, the adaptive version of the KF technique is created to adjust a suitable value for the model noise covariance.
In 2023, Jiamiao Xie et al. [20] presented a SOC estimation method for lithium-ion batteries using an EKF algorithm. The findings indicate that the simulation outcomes obtained through the EKF technique in MATLAB/Simulink align well with prior experimental findings. The proposed EKF technique showcased in this research exhibits high effectiveness and accuracy in SOC estimation. This not only develops a theoretical foundation for scenario monitoring but also ensures safety in the engineering application of LiBs.
In 2023, Koto Omiloli et al. [22] established an IEKF by means of a modified priori estimate and a compensating proportional gain, for the estimation task due to its nonlinear application and adaptiveness to noise. Enhancements were made by integrating residuals from prevailing state matrixes into the current state predictor, introducing a Kalman gain attenuated factor. Simulated outcomes indicate that the prevailing EKF estimator initially exhibits a 12.9% error because of an unstable starting.
In 2019, Xiao Ma et al. [23] described an AKF method for the battery SOC estimation. To contend with unknown interference noise, the AKF technique is employed in the model, serving as an online tool for SOC estimation. Simulated findings indicate that the current approach effectively rectifies SOC estimation errors, demonstrating superior accuracy when compared to the KF technique.
In 2020, Mostafa Al-Gabalawy et al. [24] presented a SOC estimation algorithm named EKF which is tested for variable scenarios like adding sensor noise and bias to terminal voltage and current and varying state and parameter initializations. A dual EKF is deployed to accurately estimate sensor voltage and current bias, and this estimation is contrasted with the state EKF to estimate SOC. Subsequently, a comparative analysis is conducted to determine the algorithm that provides the most precise estimation of battery parameters. The findings reveal that the dual EKF outperforms other methods, yielding the most accurate results in the estimation process.
In 2021, Zhiyong Zhang et al. [25] established an IAEKF-based SOC estimation method for Lithium-ion battery packs to provide accurate and robustness estimation. In the IAEKF, adjustments are made to the statistical properties of measurement noise through an adaptive correction mechanism known as the SHEKF. The outcomes demonstrate the efficiency of the presented SOC assessment scheme, showcasing its ability to estimate SOC accurately in complex driving scenarios and exhibiting robustness to uncertainties in model parameters.
(b) ANN Model
In 2021, Van Quan Dao et al. [21] devised an efficient method for SOC estimation in a LiB pack employing an EKF and ANN. Initially, an ANN was constructed based on the BMS and LiB pack arrangement and stipulations for SOC estimation. The results revealed that the KF and ANN approaches exhibited maximal errors of 2.6% as well as 2.8%, respectively, whereas the EKF-ANN model demonstrated superior presentation with an error of less than 1%.
.Research gaps
Table 1 illustrates the evaluation of methods of SOC estimation for Electric Vehicles. An adaptive EKF approach was developed in [18], which provides minimal estimation error with high accuracy. However, tuning the adaptive parameters of AEKF can be challenging. Moreover, KEF and AEKF algorithms are presented in [19], which offer better estimation performance with minimum error. Here, the initialization is not effective. An EKF technique was established in [20], which converges quickly with 0.02% error as well as it is highly effective and accurate. However, a major drawback is its computational complexity. In addition, the EKF and ANN model was presented in [21], which provide superior performance with less than 1% error. However, the present analysis does not encompass aspects, such as SoC estimation, as well as BMS design concerns including cell balancing and battery capacity fade. Furthermore, the IEKF algorithm was recommended in [22], which offers superior accuracy with a minimal error of 2.05%. But, the linearized approximation may not provide enough precision. An AKF system was established in [23], in which the suggested SOC estimate algorithm maintains a sufficient level of accuracy even in intricate circumstances. Due to the heavy computational burden, the BMS performance is very challenging. EKF & DEKF algorithm is familiarized in [24], which provides accurate estimation with better performance. Yet, a battery model that relies on the association between SOC and OCV would be inadequate in capturing the time-dependent dynamics. An IAEKF approach was developed in [25], which is highly robust and offers accurate SOC estimation. Nevertheless, when applied to robust nonlinear systems, this method exhibits a remarkably significant estimation error. Additionally, SOC prolongs the battery’s life and dependability while guarding against degradation and safety issues. Direct measurement of SOC is not possible; instead, certain measurable factors are needed, like temperature, current, and battery terminal voltage. As a result, it is essential to employ certain techniques that yield precise SOC estimates. Therefore, over time, a variety of estimation techniques have been developed to estimate the SOC; however, these techniques have some limitations. These techniques include optimization, computational intelligence, common estimation, bookkeeping, adaptive system, hybrid, and model-based techniques.
Review of SOC estimation based on EKF in Electric Vehicles.

Review of SOC estimation based on EKF in Electric Vehicles.
.Mathematical model
To generate a model-based SoC estimation, an arithmetical model of the battery is developed. Two different types of modeling have been offered in the literature to depict a lithium-ion battery namely electrochemical-based models [26, 27, 28] and equivalent circuit-based models [29, 30, 31].
The mathematical models that are utilized for BMS application and system integration are ECMs because of their low computing needs and ease of use in electrical networks [16]. However, a limitation of this class of models and the main impetus for the establishment of electrochemical models exhibit the difficulty of connecting the battery ageing processes to ECM parameters [17]. These factors currently make them computationally intensive for the BMS to use on the vehicle’s board [29].
The secondorder ECM is considered with variables that are set based on investigational results as depicted in Fig. 1. Here is the discrete time domain state space formulation:
The above Eq. (1) indicates the SoC dynamics, here,
The following describes how the modelled output equation connects the drop in voltage among the equivalent circuit elements coupled to the output voltage 
Also, by signifying the state vector model as 
The output voltage in Eq. (2) displays nonlinearity since the open circuit voltage is not linear when linked with the state

Circuit diagram of battery model.
.Kalman Filter algorithm
KF is a commonly used estimating technique. It discusses estimating a linear system with additive white noise under the presumption of a Gaussian distribution. KF is an optimal estimator of the unknown state of a stochastic system that makes use of the attractive qualities of a linear system, applied to Gaussian noise. Instead of assuming a strictly deterministic process, it is more appropriate to assume that the system is stochastic. Given this additional information, a KF computes the system’s variance and uncertainty and makes an effort to deliver the best estimate possible. This perspective differs from the deterministic Luenberger observer, which does not change continuously and rather employs a constant observation error [32].
To define the KF, assertions are made about additive Gaussian noises and linear dynamics. Consequently, an exact technique of a closed form might be implemented using the features of the linear stochastic system. Two steps might be distinguished in the KF technique:
Model prediction/time modification predicts the next state in the system time evolution using a linear model with a combined Gaussian process and measurement statistics. The measurement update corrects the next state model prediction estimate to a virtually certain value by using system sensor data and dynamically updated Kalman gain. According to [32, 33], linear KF approach is given as:
Stochastic state-space model:


Model Prediction:


Measurement update:



Actually, no system could be expected to be linear, so nonlinear systems’ estimating approaches are crucial. In real life, nonlinear systems are linearized via the kneejerk reaction. Nevertheless, minimal linearization errors are generated. This method yields a linearized KF when applied to KF. System dynamics are linearized by this approach, which leads to poor performance because the linearization error gets compounded by system covariance. That would be resolved by the EKF. EKF requires only a minor modification to the procedures to handle nonlinear systems. The presentation of the assessment is considerably impacted by non-linearized system dynamics, which define the distinction between linearized KF and EKF [34].
It is now easier to compute a deterministic nonlinear equation with state observers since the entire nonlinear description of the system is maintained, minimizing linearization errors. On the other hand, while closed-form nonlinearity system transformation is difficult to determine or might not exist, linearization of both nonlinear covariance and stochastic characteristics is required. Consequently, even though it is an approximated value, these quantities’ linearization is required to maintain the Gaussian filter. EKF is not an ideal observer as an approximation, since it requires linearization, which compromises performance. Lastly, more sophisticated estimators, such as the Bayesian estimator and particle filter, may produce more accurate findings but they are more costly [34, 35, 36, ?]. The following EKF algorithm is represented as:
State-space model:


Here, 

For
Time update:


Measurement’s update:



In the next section, to enhance the accuracy and stability of SOC estimation, a modified EKF is adopted based on KF and EKF.
An extension of the EKF that uses adaptive methods to enhance its ability to handle uncertainties or time-varying system dynamics is called a Modified Extended Kalman Filter (MEKF). When it comes to EVs, an MEKF can be utilized for sensor fusion and state estimation to improve the precision of data regarding the vehicle’s status, including position, velocity, and battery level. The statistical cumulative error-based EKF is used in the suggested research for estimating the SOC. Based on prevailing battery SOC information, an innovative mathematical model was created to control the cumulative inaccuracy. The goal of addressing the SoC estimation problem for an EV application is to build a model that will enhance vehicle power management and battery usage. To compute the error involved in the estimation of SOC, the associated higher-order statistical features, like kurtosis, skewness, correlation, contrast, entropy, and homogeneity are extracted from the sample signal. Higher-order statistical characteristics, such as kurtosis and skewness, identify non-linear correlations and departures from the normal distribution. Non-linear variations in data characteristics are a common manifestation of changes in SoC, and these features are better able to identify these variations than basic statistical measures like mean and variance. In addition to time-domain features (such RMS, standard deviation) and fundamental statistical features (mean, variance), they offer more information. Particularly in the dynamic and non-linear operating conditions of EVs, this extra data can increase the SoC estimate algorithms’ accuracy and resilience. Improved accuracy, resilience, and sensitivity to the dynamic and non-linear behaviors displayed by electric car battery systems can result from integrating higher-order statistical features into SoC estimate techniques for EV applications.
The Modified EKF technique is primarily depending on the process of prediction model and measurement update, which are given as below:
Model Prediction:


Measurement update:



The remaining measurement assessment is given by

In the designed approach, a new error 
The proposed equation is updated as


Where,
The effectiveness of a developed framework is assessed in this research using error metrics, like MAE, RMSE and MSE. In addition, MAE defines the average absolute error among the actual and estimated values. A significant RMSE implies a high degree of dispersion. RMSE is an indicator of the dispersion of the sampling signals.



.Simulation procedure
To assess the developed approach for estimating SOC, a battery with 28Ah nominal capacity and the proposed framework were employed in the research article [19].
Residual measurement value is given by


Here, the estimated load is determined from the Cubic Spline Interpolation. By varying the temperature and measured output values, the corresponding sample value is determined and is given to the Cubic spline Interpolation.

Where,
MATLAB/Simulink simulations were conducted across a range of lithium cell operating scenarios to raise the precision and stability of the SOC estimate. Consequently, a comparison was made between the assessment of the SOC estimate and the outcomes concerning error measurements.
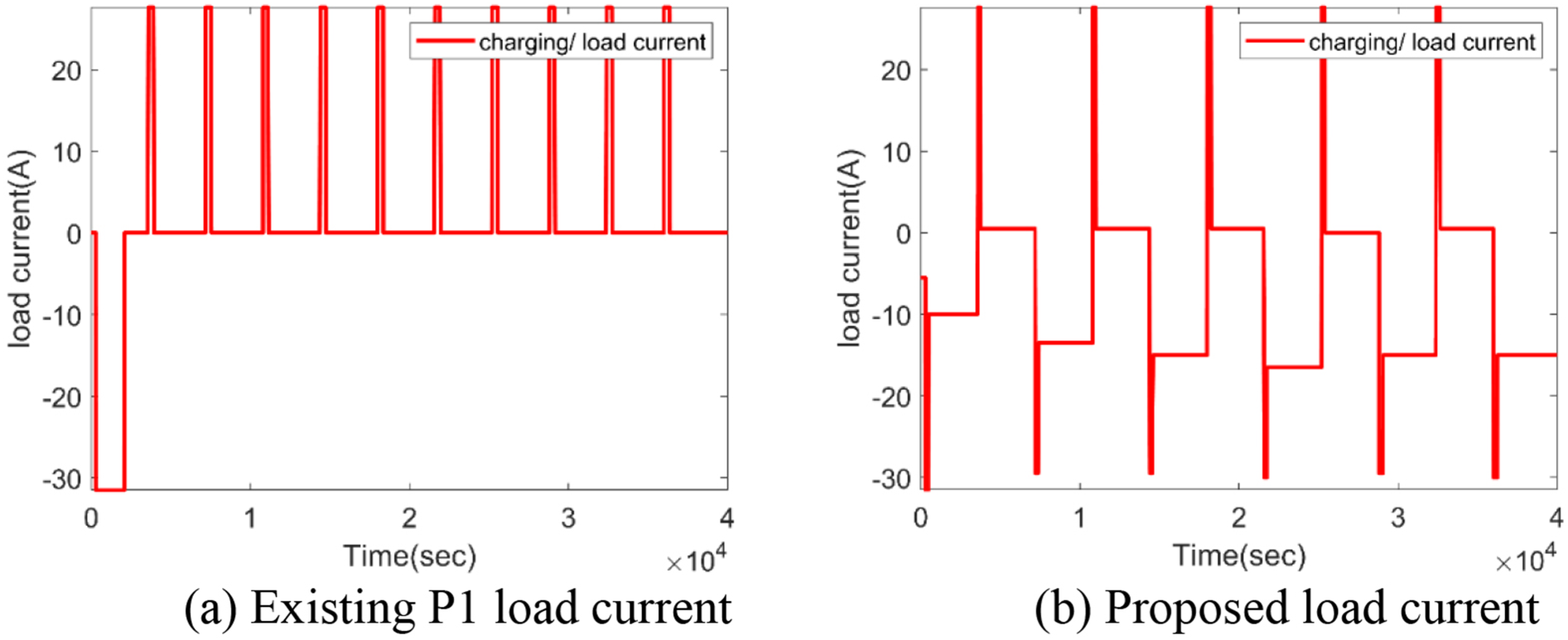
Performance based on charging/load current.
In Fig. 2, the obtained results show the performance based on charging/load current for both the existing P1-EKF approach and the proposed EKF approach. Figure 2a illustrates the existing P1 load current which depicts the variation in load current over time throughout the charging process, as determined by the traditional P1-EKF method and the particular experimental or simulated data employed in the research. Figure 2b illustrates the proposed load current and displays the behavior of the load current using the modified EKF method. It showcases the load current profile over time, indicating enhancements or differences compared to the existing P1-EKF approach. The proposed approach shows improved accuracy, stability, or efficiency in estimating the load current during the charging process.
Upon analyzing the outcomes depicted in Fig. 2, glean insights into the performance of the proposed EKF method for estimating load current during charging. Figure 3 displays the SOC error as well as the estimation SoC based on the existing P1 over Modified-EKF. The following formula is used to compute the estimation error:

In Eq. (34),
Figure 3 illustrates a comparison between the estimated state-of-charge (SOC) error as well as the estimation of SOC based on the existing P1 model against the Modified EKF model. Estimated SOC error shows the evolution of the predictable SOC error over time for both the existing P1 model and the proposed Modified EKF model. It demonstrates the error in SOC estimation changes throughout the simulation or experimental period. Estimation of SOC illustrates the actual estimation of SOC based on the existing P1 model and the Modified EKF model. It shows the predicted SOC values generated by each model and compares them to the true SOC values. Initial error comparison shows that the estimated error is slightly extensive at the beginning of the process for both models. This initial comparison indicates the starting performance of each model. Error evolution demonstrates the error evolves over time for both models. It shows that the error in the Modified EKF model is essentially constant and much smaller than that of the standard P1 technique, indicating improved accuracy and stability. The results highlight that the error discrepancy grows at certain points, and the Modified EKF model autonomously corrects it within a
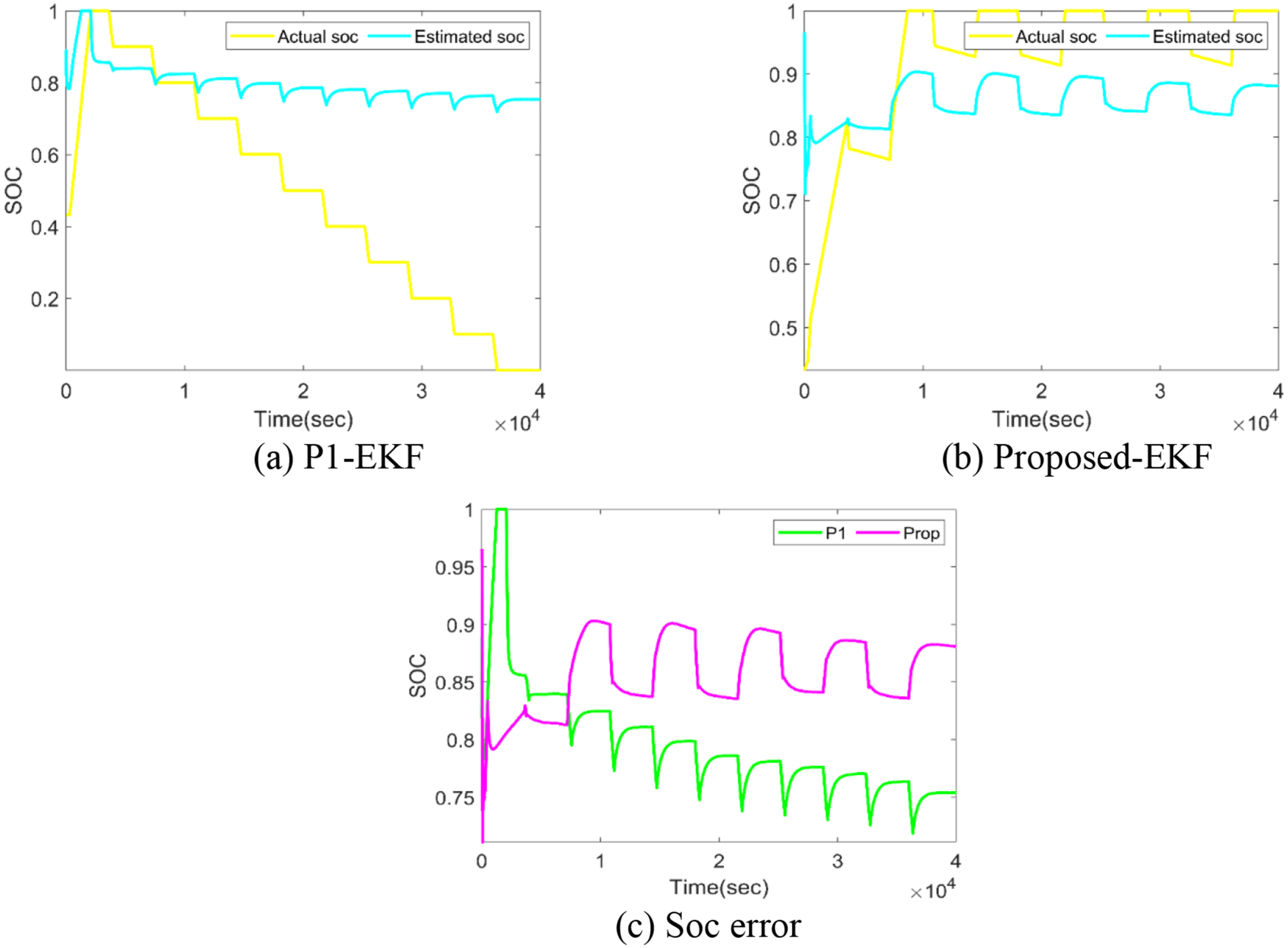
Comparison between actual vs. estimated SoC curves.
The charging/load current of both the existing P1 and the proposed modified EKF is shown in Fig. 2. It illustrates that, in comparison to the prevailing P1 approach, the proposed MEKF begins at 0 and goes negative up to 0.7

Curve based on temperature for suggested against prevailing techniques.

Curve based on terminal voltage for suggested against prevailing techniques.
Estimated SoC error measures.

Table 2 illustrates the comparative analysis of estimated error measures of the typical P1 technique and suggested Modified-EKF. According to Table 2, the mean absolute error (MAE) of prevailing P1 is 0.3352%, the estimated MSE is 0.16977%, and the RMSE of estimation error is 0.41203%. The estimated MAE of Modified-EKF is 0.2681%, the MSE is 0.11595%, and the RMSE of the estimated SoC error is 0.34051% respectively. As a result, compared to the conventional P1, the modified EKF estimates SOC with greater accuracy. When estimating state-of-charge (SOC) for a substantially nonlinear system, such as LiBs, the modified EKF model performs better than the traditional P1 model and can minimize linearization error produced by eliminating higher-order terms.
In this research, a state space model for a lithium-ion cell battery in the context of an EV was identified and validated through experimental data. The issue of estimating the SoC was tackled by employing two algorithms: the EKF and its modified counterpart, the MEKF. As the LiB is a typical nonlinearity system, estimating SOC with the EKF technique is a better idea. The model prediction and measurement update are the two stages that make up the EKF technique. A modified version of the EKF has been developed by integrating aspects of the KF and EKF to enhance the stability and precision of SOC estimation. The statistical cumulative error foundation of the EKF is employed in the projected research for SOC estimation. An adaptive law for the process covariance has been defined in the EKF. These techniques have been put into practice via simulation and examined using actual data. In terms of estimate error, the MEKF findings are within 1% error, when compared with the existing P1 approach. To validate accuracy, a comparison is made across the EKF algorithm’s experimental outcomes and simulated estimated results. These findings indicate a strong agreement among the simulation results generated through the Modified EKF technique with prevailing experimental outcomes using MATLAB/Simulink. In real-world applications, it is useful since it is simple to implement on the automobile microcontroller. Consequently, in order to increase the precision of SoC estimation even further, future study will focus on integrating real-world battery systems that have the ability to update model parameters in real time. uture works include the authentication of the estimated SoC implementation technique, which is based on the analogous circuit-based AKF approach in the real BMS.