
Abstract
The future smart grids will contain a high number of Plug-in Electric Vehicles (PEVs) that will move in the grid widely. The high penetration of these devices will bring new challenges regarding the optimal operation and management of the system. In this way, this paper proposes a realistic framework to first model PEVs movements in the grid and second schedule their movement for minimizing the costs. The cost function consists of the total network cost for supplying the electric loads and PEVs for 24 hour time horizon. According to the high complexities of the problem, a new optimization framework based on teacher learning algorithm (TLO) with a new modification method is proposed to search the problem space thoroughly. The feasibility and satisfying performance of the proposed optimization framework are examined on the IEEE test system.
Keywords
Nomenclature
Total network cost.
Hourly energy price/ loss cost/ V2G price
Energy for PEVs in fleet v to drive at time t
Available energy in batteries of fleet v at time t
Initial/final energy in PEV fleet v
Min/max energy in batteries of PEV fleet v
Number of the iteration
Population
Number of loops/branches/buses of network.
Number of students in the population.
Population size.
Total number of PEVs.
Hourly/max imported power from upstream grid minus the power losses.
Hourly active power loss of network.
Charging/discharging capacity of PEV fleet v.
Min/max charging capacity of PEV fleet v.
Min/max discharging capacity of PEV fleet v.
Charge/discharge power rate of PEV fleet v at time t.
Hourly injected active/reactive power at bus i.
Hourly/max apparent power flow between bus i and j. L Random integer equal to 1 or 2 T Planning horizon. Time in which SOC is set to a specific value.
Status of grid connection of fleet v at time t.
Indicator of fleet v in charge/ discharge/idle mode.
Upper/lower bound of jth control variable.
Voltage magnitude/phase of bus i at hour t.
Minimum/maximum voltage at bus i.
ith solution in the population.
Magnitude/phase of impedance between bus i and j.
Constant values.
Random values in the range [0,1].
Introduction
The recent growing concerns over the ever increasing value of fossil fuel pollutions have attracted the attention of most of the researchers and engineers toward the new clean apparatuses. In this regard, plug-in electric vehicles (PEVs) are novel appliances presented to substitute the customary fossil fuel based vehicles for decreasing the green-house gasses when saving fossil fuels for advantageous and valid purposes in the future [1]. Furthermore, the impression of PEVs effects will aid to supply renewable power sources such as wind turbines (WTs), photovoltaics (PVs) and so care the hint of movable power sources more than before [2]. However, along with the many benefits of these PEVs, their appearance has produced new challenges in the optimal operation of power system. Actually, PEVs in the grid are similar to movable loads which their charging and discharging behavior vary from one driver to another one. Consequently, the development of any management scheme will affect the behavior of PEVs separately while can avoid the system from reaching the optimal situation of operation. This matter becomes more noteworthy when considering a high number of PEVs moving at the same hours in the system. To summarize, congestion on the transmission and distribution lines and transformers, growing energy losses, lessening reliability and power quality are specifics of the practical challenges of using big number of vehicles in the grid [2–4]. In this case, a smart organization policy is needed to control the performance of these devices and changes them to opportunities for the grid. Author in [5] states that a bulk portion of the electric vehicles are inclined to be charged in the residential garages at hours with the most electricity demand. Moreover, the random driving pattern of diverse vehicles makes the problem more intricate than before. With the intention of solving this matter, the Vehicle-to-Grid (V2G) idea is employed. V2G technology is created to decrease the influences of PEVs on the grid by providing energy and ancillary services to the main grid [6, 7]. In the V2G technology, PEVs can choose to either sell or purchase energy to or from the grid. Hence, bearing in mind the portable feature of PEVs, the energy can be transferred between the buses at different hours without any specific rule. This idea creates a good opportunity for the system central control to cope with the behavior of PEVs such that the total cost of the system would be reduced [8–11]. In effect, once PEVs want electric energy for driving distances, they can even make advantage for the system if optimally are coordinated [12].
As the above explanations illustrate, this paper tries to manage the optimal scheduling of PEVs using the V2G technology. In this regard, the grouped PEVs are considered in the form of fleets with precise driving outlines such as starting locations and destinations along with departure and arrival hours at charging places. The study is done for the time period of 24 hour. It is evident that there are a number of uncertain limitations that should be regarded aptly. According to the high complexity of the problem, a satisfactory influential optimization algorithm based on teacher learning algorithm (TLA) is proposed. TLA is an evolutionary optimization technique that is constructed based on the learning process of students in a class [13]. Nonetheless, so as to advance the total hunt ability of TLA with regard to the promising solutions, a novel modification method is proposed too. The proposed modification is capable to increase the total search ability of TLA algorithm. The possibility and satisfying performance of the proposed method is shown using the IEEE 69-bus test system including five large PEV fleets.
The rest of the paper is organized as follows: The PEV problem is formulated in Section III, where the objective function and main constraints are introduced. The proposed modified TLA (MTLA) algorithm is explained in section IV. The simulation results on the test system are shown in Section V. Lastly; the main remarks of the research are summarized in Section VI.
PEV fleets and problem construction
PEV fleets
PEV technology is an ever increasing and popular vehicle that can help to preserve the fossil fuel and at the same time reduce the green house gases. Nevertheless, from the view point of the main grid, PEVs are movable loads that can be dispersed throughout the electric network. The random charging of PEVs and different daily patterns of the drivers are big challenges in front of the rapid growth of this technology. In order to deal with this issue, a suitable model should be devised to handle the behavior of the PEVs appropriately. Therefore, we have made some simple assumptions to make the model more practical. Each PEV fleet consists of a number of PEVs that experience the same path and the same departure and arrival time and location. According to the statistical researches, an average driver will experience two trips per day neglecting some short breaks with average time of 10 minutes [14]. These short intervals can be neglected without the kill of accuracy. This issue is especially correct when considering the hourly programming. Therefore we will have two main trips for each fleet, the first one at the beginning of the day and the second one at the end of the day. From the operation standpoint, PEVs can work in three statuses: 1) charging mode, 2) discharging mode and 3) idle mode (which means that PEV does not charge or discharge). The discharge mode is provided by considering the vehicle-2-grid (V2G) technology.
In order to make the analysis more practical, al PEVs are supposed to be fully charged at the beginning of the first trip in the morning. During the times that PEVs are on the road, the can not charge or discharge since there is no access to the charging points. Also, at times that PEVs are in the parking, they can choose to charge, discharge or even be idle. Idle mode means that PEV does not charge or discharge depending on the preferences and the cost benefits. The other issue is regarding the State-of-Charge (SOC) foe batteries that not drop lower than the minimum Depth-of-Discharge (DOD). According to the literature, 20% DOD is suitable for avoiding rapid aging of the PEVs batteries [15].
Problem formulation
The problem in hand is a minimal optimization problem that aims to reduce the total cost of the network when meeting some security and practical limitations. The existence of PEVs can provide good opportunity for transferring energy among different buses without any additional cost for line/substation installation. Therefore, the cost function is the total cost of the power supply by the electric grid as shown in (1). Equation 2 reveals the active/reactive power flow balance in each bus. Equation 3 conserves the voltage restraint on the buses in each time period t. Equation 4 regards the supreme power flow on each feeder without thermal issues. Equation 5 determines the charge/discharge/idle status of PEVs in fleet v at interval t. Equations 6 and 7 display the maximum and minimum charge/discharge rate of batteries [16]. Equation 8 displays the hourly energy equilibrium in PEV batteries. Equation 9 determines the amount of power exchange between the PEV and the main grid at hour t. In order to preserve the same energy capacity in the PEVs at the beginning and end of the day, Equation 10. Equation 11 are used. Finally, Equation 12 meets the amount of energy in the PEVs maximum at the beginning of the first trip.
Original teacher learning algorithm (TLA)
According to the high complexity and nonlinearity of the problem, we make use of the TLA algorithm as an evolutionary method. TLA was first introduced by Rao et al. in 2011 [13] as a new population based approach inspiring the relationship between the teacher and the students in a class. The main feature of this method is low dependency of the algorithm on the initial adjusting parameters. TLA is constructed on a number of students each one showing a promising solution for the problem. The teacher X Teacher as the best student is showing the best optimal solution for the problem. The optimization process of TLA is simulated in two phases 1) Teacher Phase or progress knowledge from the teacher to recover the students and 2) Learner Phase or progress knowledge by communication among the students themselves. In the first phase (Teacher Phase), the teacher struggles to get the information of the class up to his/her level. In the second phase (Learner Phase), by the use of communication behaviors, the knowledge of the students is altered among themselves such that their knowledge will be improved appropriately. This phase is actually a decent simulation of what affairs in the reality by the use of presentations, friendship communications, group deliberations, etc.
Similar to any other evolutionary algorithm, TLA is initiated by a random population. Then the objective function is calculated for each solution (student) to show the fitness function degree. Now, the best solution with the lowest value of fitness function is chosen as the teacher. In the next steps, the teacher phase should be applied to the population. In this way, the mean value of the whole population is first calculated column-wise.
Now, the teacher will shift the mean value of the students’ grade toward his/her position as a better solution. Then new position for each student is generated as follows:
If Xnew,Q has better position than Xold,Q (a student with higher knowledge than before) then substitute it. Then the Learner phase should be agitated. As mentioned before, this procedure is completed among the students. With the intention of simulating this process, for each student in the class, two students i and j are designated in the way that i ≠ j. Then the following equation is implemented.
Here F (X) is the objective function value of the student X; Also μ1 and μ2 are random values in the range of [1].
TLA is a dominant optimization system with remarkable appearances such as simple idea, easy implementation, few number of adjusting parameters, skill of solving multimodal problems and subdivision capacity. Automatic subdivision characteristic is the capability of an algorithm to swiftly divide a curve and pursuits for the optimal solution in each part discretely. This feature is very beneficial for solving optimization problems with several modes so-called multi-modal problems by the researchers. Nonetheless, here we state a new modification method for this algorithm to recover its search ability more efficiently. The proposed modification method is constructed on the idea of increasing the variety of the students in the population by the aid of crossover and mutation operators from genetic algorithm. In the first phase, for each solution X
i
, three solutions Xk1, Xk2 and Xk3 are extracted out from the population such that i ≠ k1 ≠ k2 ≠ k3. Then, by the use of mutation and crossover operators, the beneath two improved solutions are germinated [17, 18]:
Now by the use of X
Teacher
and X
muted
, three new modified learners are produced as the following:
The best solution among Xmute1, Xmute2 and Xmute3 is compared with X i and replaces it if it more dominant.
In order to apply MTLA to the proposed stochastic problem, the below steps are required: State all the input records comprising the network and algorithm data, PEV characteristics, objective function and constraints parameters. Engender the initial student population. Each student is a auspicious solution for the problem. Compute the fitness function. In this step, the value of the cost function is determined for each solution. Select the best solution as X
teacher
. Adjust the position of students according to the student and teacher phases. Perform the proposed modification method to improve the population. Update the position of best teacher. Repeat steps 5 to 7 until the termination criterion is satisfied.
Case study
In this part, IEEE 69-bus electric grid is used to check the performance of the method, the accuracy of the analysis and the main benefits and advantages of the proposed formulation. This system is taken from [18]. The voltage level of this system is 12.66 kV and it supplies 2142 kW and 1500 kVar loads, respectively. Figure 1 shows the single line diagram of the network. Five PEV fleets are considered in the grid which the data are yieldinglater.
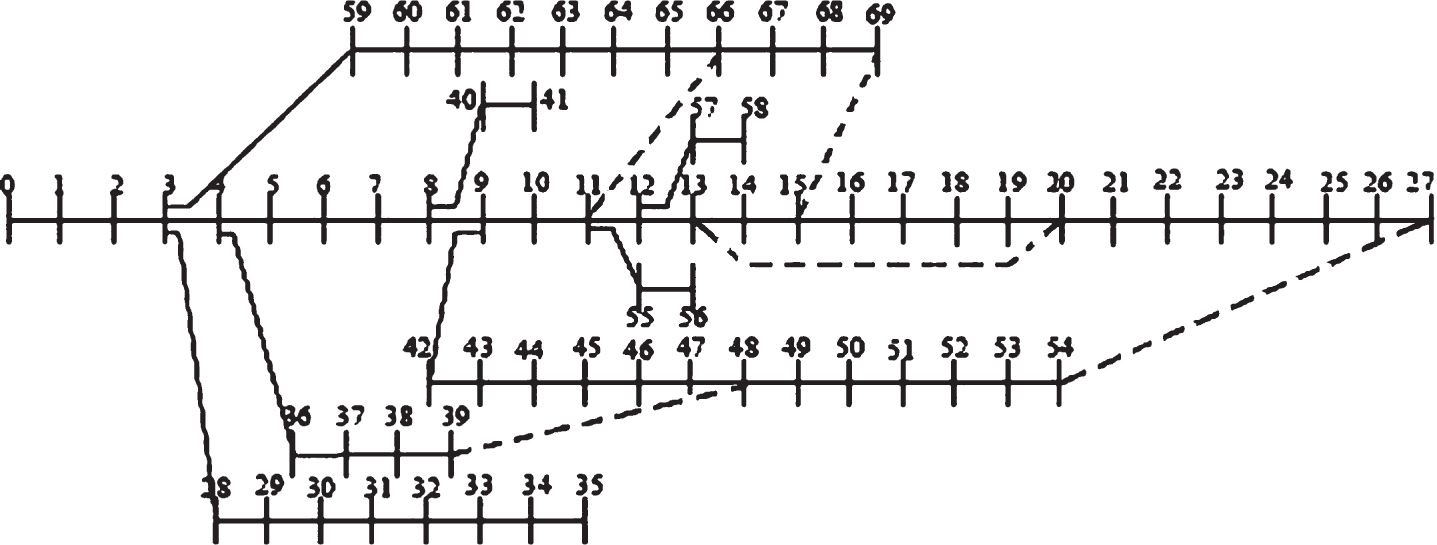
IEEE 69-bus distribution test system.
In order to make a 24-hour programming, the accumulative load value of the grid is leveled into a 24 hour scheme as shown in Fig. 2. It is worth noting that the termination criterion for the algorithm is supposed 100 iterations. Also, the initial size of the students is 25. All the data are determined experimentally by several running of the algorithm. In Table 1, the cost of energy at dissimilar hours of the day is revealed. As well, Tables 2 and 3 show the features of the PEV fleets containing charge/discharge capacity/rate, initial location and the destination place and the length of the travels.
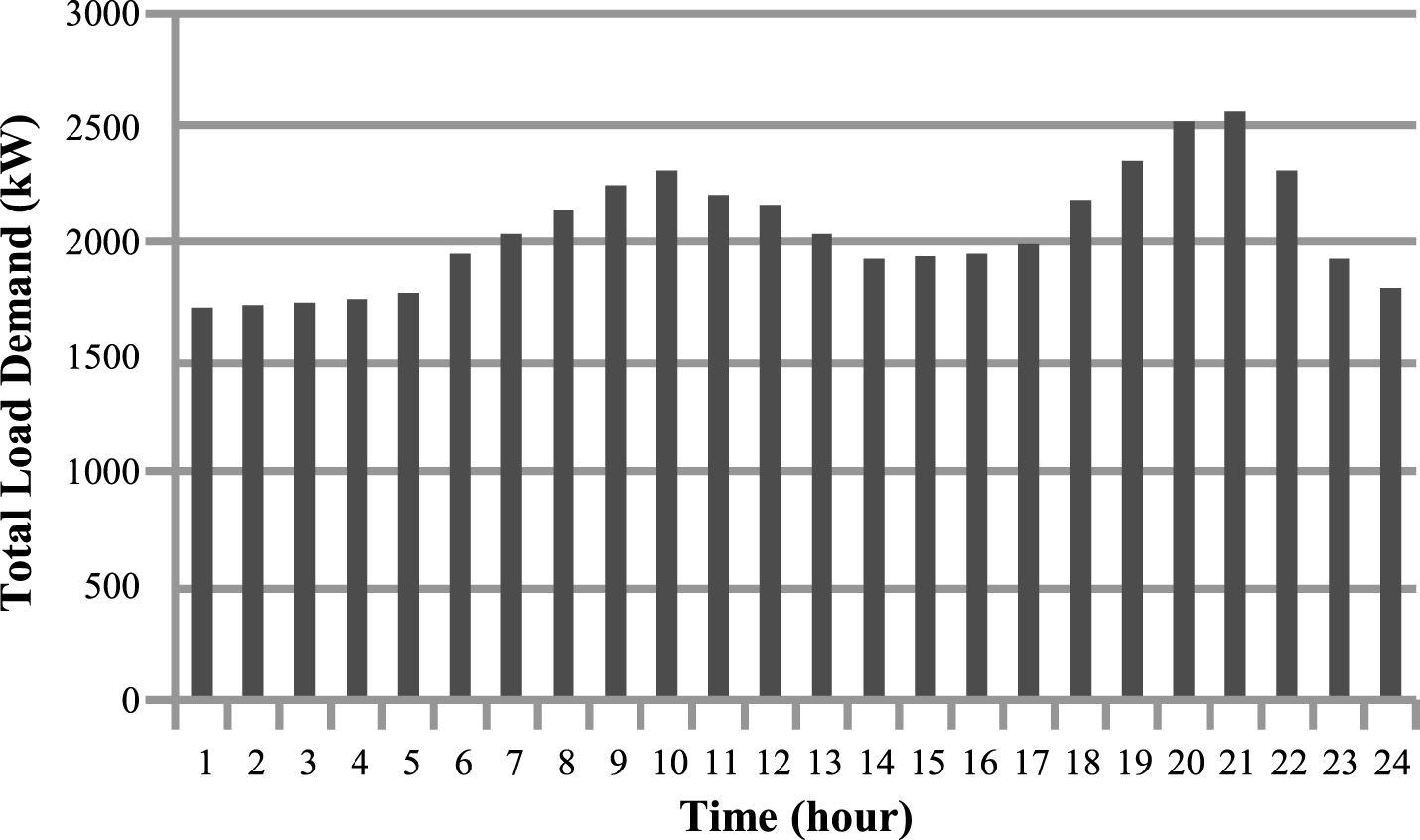
Forecasted load demand of the network.
Forecasted energy price
PEV fleet characteristics
PEV fleet travel characteristics
As it can be seen from Table 3, two main trips are considered; the first one at the beginning of the day and the second one at the end of the day. During the hours that the PEVs are not on the road, they are either in the parking or at home which in both cases can be charged or attend the V2G system. In Table 4, the outcome of seeing V2G PEV fleets on the cost of the network are revealed. For more truthful judgment, the hourly costs in two cases of considering and ignoring PEV fleets are shown. This comparison can be made for better understanding the effect of penetration of PEVs in the grid. Note it that PEVs are additional loads for the system and consequently normally it is anticipated that the cost of system should be increased. Nonetheless, by the idea of V2G technology the total cost value has lessened suitably. This success is attained as the result of energy transfer amongst the buses at different hours of the day. As it is seen from Table 4, the total preliminary cost of the grid has been 10,303,108.67 ($) that is reduced to the value of 9,857,058.57 ($) after the appearance of PEVs. This decrease in the system cost can be seen in the majority of the hours visibly.
Effect of the considering PEV Fleets on the cost function
The optimal power exchange between the EV fleets and the main grid
The optimal amounts electric energy exchange between the PEV fleets and the main grid are shown in Table 5. As it can be seen from Table 5, the fleets are inclined to charge at low-load hours while they prefer to discharge at peak-load hours. This is a logical solution for minimizing the total costs.
One significant point is to preserve the voltage of the buses before and after the penetration of PEVs in the acceptable range. In order to see this matter more deeply, Fig. 3 is illustrated here. This figure provides the fair design of the maximum voltage deviation of the buses for each hour with and without PEVs. According to this figure, the voltage level of the system is in the restricted range and even some improvements can be seen at some hours of the day.
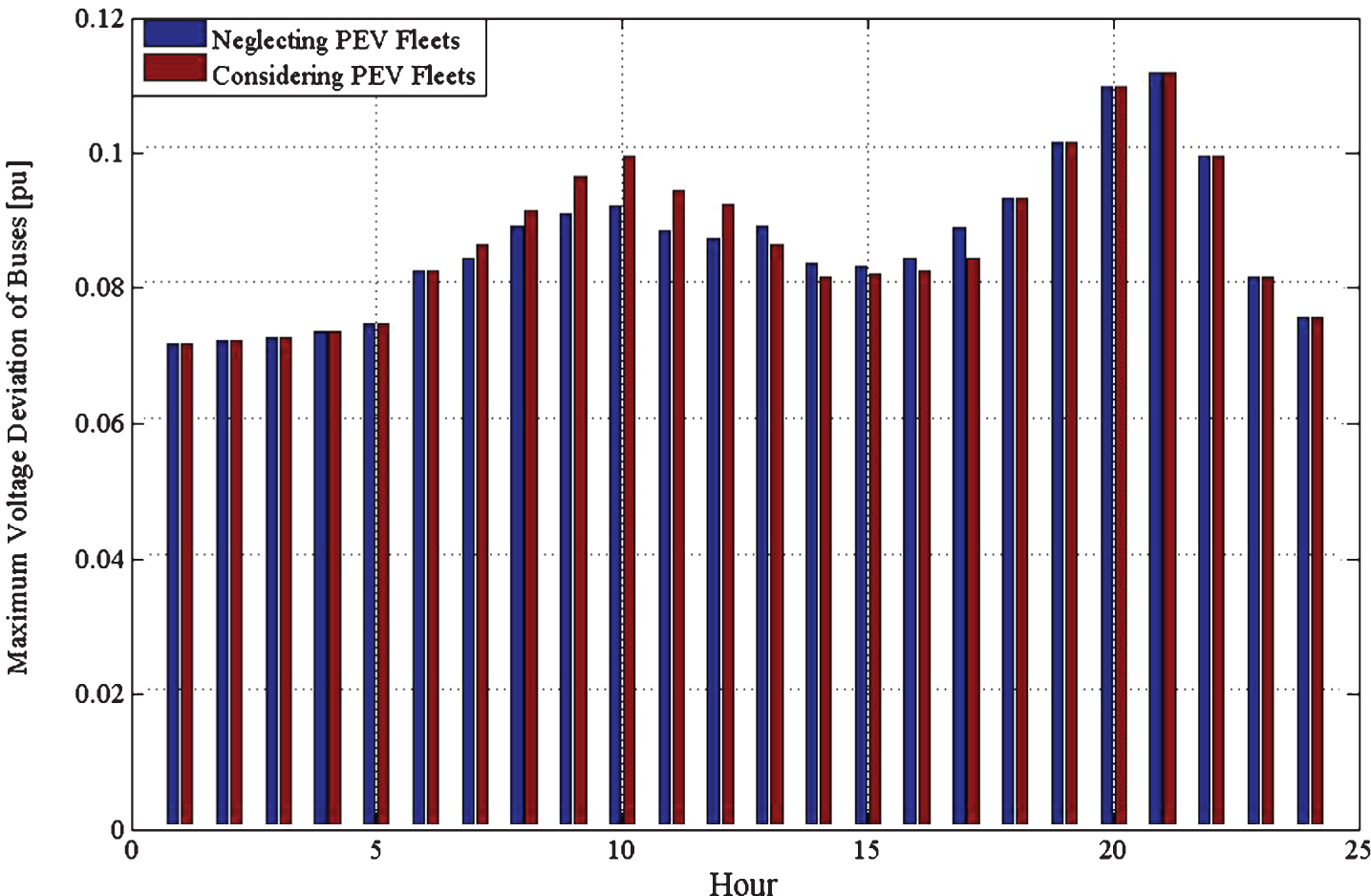
Maximum voltage deviation of the system in different hours before and after considering PEVs.
This paper tried to address the high penetration of PEVs in the distribution systems through a cost-benefit procedure. In this way, first a realistic model of the PEV fleets were devised and then a suitable optimization framework was constructed. The simulation results on the IEEE 69-bus test system shows the highly effective role of PEVs in the smart grids. According to these results, considering the V2G idea can diminish the total cost of the network. Here, the PEV penetration will become an opportunity for the grid to reduce the costs. In addition, the voltage level of the system could be preserved in the pre-determined levels. To summarize, the simulation results showed the high ability of the proposed method in handling the optimal operation of the power system seeing PEVs.
Footnotes
Acknowledgments
The authors would like to thank Islamic Azad University, Marvdasht, Iran for their finance support.