
Abstract
The growing number of large ships demands predicting their optimum performance with respect to travel time, fuel efficiency and the safety of cargo and personnel in specified shipping routes. This can be achieved using efficient and easy to use numerical tools capable of predicting hydrodynamic loads on floating vessels with steady forward speed and solving their motion response in various wave conditions. A three-dimensional potential theory based code using the Green function method is developed with consideration of forward speed effects. The generalized coordinate system is used to allow motion response calculations with respect to any desired body coordinate system and a common quadrilateral meshing format. The formulation and calculation of added mass and damping coefficients at zero and infinite frequency in forward speed case has been also provided.
A number of structures including simple geometries and full ship hull forms have been analyzed and validated against published theoretical, numerical and experimental results. The comparison results are found to be in excellent agreement. The theoretical formulation, numerical implementation and result comparisons are presented here.
Nomenclature
ship forward speed wave heading wave amplitude wave number incident wave frequency encounter wave frequency incident wave potential steady translation potential diffraction wave potential radiation potential due to unit motion in jth direction jth vessel motion amplitude acceleration due to gravity gradient of the forward speed potential Green function added mass coefficient radiation damping coefficient vessel mass matrix hydrostatic stiffness coefficient Froude Krylov force diffraction force unit normal pointing outward from the hull surface hydrodynamic pressure on hull source strength surface area of jth panel
Introduction
Potential theory methods have been in development for applications in aerodynamic and hydrodynamic problems for many decades. The mathematical derivation of the results using the fundamental laws of fluid mechanics has attracted researchers from around the world. Also the marine industries including navy, commercial ship building and the offshore oil and gas industries are currently using different seakeeping computer programs based on these theories for the design and operation of marine vehicles and structures.
The idea of representing irregular ocean waves as a superposition of many linear sinusoidal waves was first proposed by St. Denis and Pierson [48]. This opened the door for the development of both experimental and theoretical techniques to predict vessel response in random waves. Linear two-dimensional strip theories for seakeeping analysis were the most popular ones before the revolution in computing technologies. The widespread availability of high computational power has allowed the development of three-dimensional linear theories. Nonlinearities resulting from high seas have also been considered and later incorporated in both strip theory and three-dimensional panel methods.
The first strip theory for heave and pitch motions of ships in head seas was given by Korvin-Kroukovsky and Jacobs [27]. This was then refined by Gerritsma and Beukelman [10]. However, the most popular strip theory method is the one by Salvesen et al. [42] known as the STF method. In that work, the authors presented a complete linear potential theory considering forward speed of the vessel initially without any strip theory assumptions and then they applied strip theory to obtain the final results. The authors also mention that the theory presented is exact for the zero speed case within the assumptions of linear potential theory which allows analysis of non-slender bodies such as offshore platforms. The strip theory assumption restricts the use of these methods to slender bodies and only for the high frequency range and for low Froude numbers.
For higher sea states and Froude number greater than 0.4, the nonlinear effects may become important. The nonlinear strip theory methods tries to capture these through instantaneous wave elevation at every ship section [39].
One of the limitations of the strip theory method is that it is only valid for the high encounter frequency range. Newman [36] developed a method and then Newman and Sclavounos [38] modified the same to solve the seakeeping problem for different frequency range using near and far field methods and then joined them both to give a unified solution.
The era of the three-dimensional methods began when Hess and Smith [17] first introduced flow calculation about arbitrary, non-lifting, three-dimensional bodies using Rankine sources. Later, Hess and Wilcox [18] developed a computer program which included the previous method along with an undisturbed free surface by introducing a system of image sources. The Rankine source method have been used for solving ship motions problems in both the frequency domain [34] and the time domain [35]. The main difference between the Rankine source method and the 3D Green function method is that the Rankine sources do not satisfy the free surface boundary condition, and hence require panel discretization of the free surface around the floating body. This significantly increases the total number of panels in the computation.
The use of Green functions to represent the source potential in solving wave loads on floating offshore structures in the frequency domain was first introduced by Garrison [9]. This method became popular among many researchers and engineers as seen in [1,3,20,37,40,49], who have worked extensively in developing efficient methods to numerically evaluate the Green function. Efforts have been also made in developing a time-domain 3D Green function as well [2,31]. The strength of this method is that the Green function satisfies the free surface boundary conditions, and hence only the submerged part of the hull needs to be discretized. The lower number of panels improves calculation speed. However, it should be noted that the evaluation of the Green function is more time consuming compared to simple Rankine sources.
Even though the frequency domain potential theory and 3D panel method techniques have been around for a couple of decades and have been studied by many researchers, it is still a challenging task to implement them in a numerical code. Recent developments includes the panel free method using NURBS surface and potential theory based code presented by Qiu and Peng [41]. Kjellberg et al. [26] attempts to couple boundary element methods with a semi-Lagrangian free surface model to incorporate all nonlinearities of potential flow methods. Kashiwagi and Wang [24] shows a method to remove the moderate forward speed restriction in potential theory codes. A number of codes based on time-domain potential theory has been also developed of which the most recent is found in [15]. In order to focus this article in frequency domain, a complete literature review of the time-domain methods is not presented here.
It was found that some existing commercially available computer programs impose constraints such as resolution or total number of frequencies for which analysis can be performed or the number of bodies for which full QTF’s can be calculated [14]. In order to overcome these difficulties an in-house program called MDLHydroD has been developed. McTaggart [32] gives a concise guideline on implementing the 3D method and the work of Filkovic [7] provides a method for panel discretization. The derivation of forces and motions given by Salvesen et al. [42] using potential flow is also valid for 3D methods as well and therefore used here to obtain the final results. It is important to understand all the assumptions made in developing these theories and intricacies involved in implementation of the code. Any further development towards analysis of more complicated problems such as estimation of parametric roll, optimization of hull, multi-body interaction or coupled hydrodynamics with mooring and risers relies on accurate estimation of the linear assumptions. The following sections give details of hydrodynamic problem formulation, numerical implementation and comparison of results.
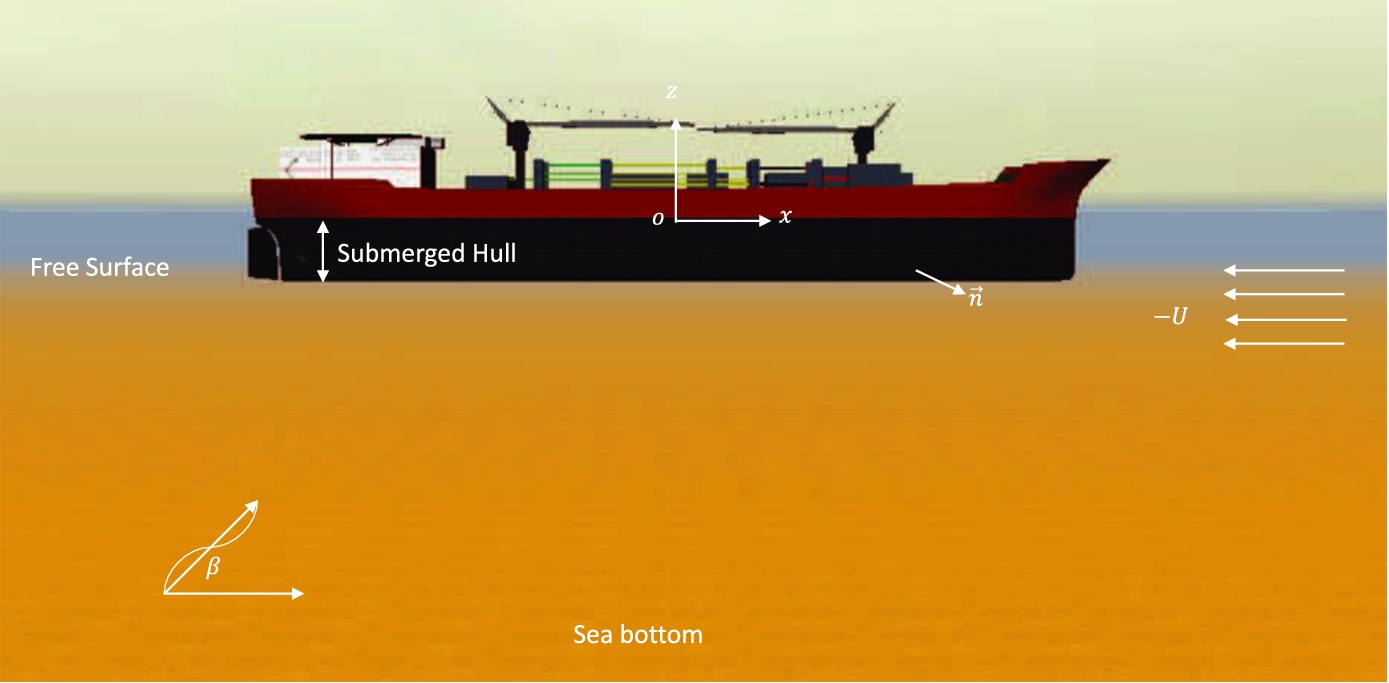
Definition sketch. (Colors are visible in the online version of the article;
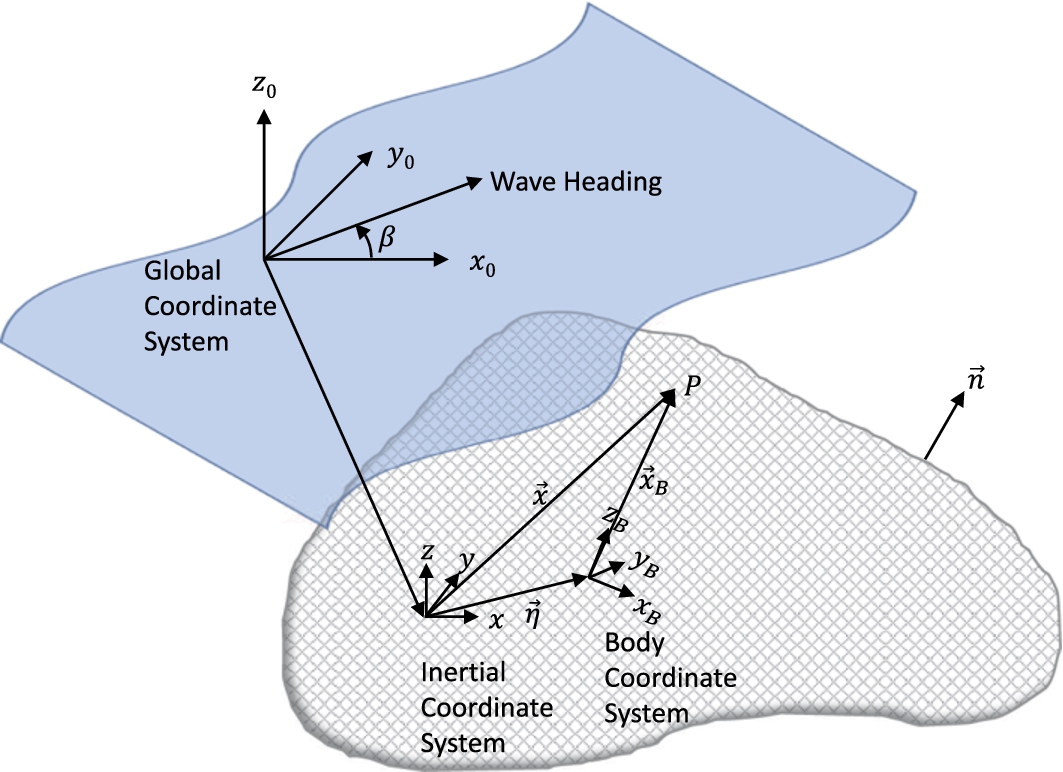
Generalized coordinate system. (Colors are visible in the online version of the article;
A ship moving with a steady forward speed U in deep water with regular waves of wave amplitude A and incident frequency
The velocity potentials satisfy the Laplace equation in the fluid domain:
Free-surface boundary condition:
The bottom boundary condition
The Sommerfeld radiation condition: The waves generated by the oscillating body must radiate outward from the body [33]
The body surface boundary condition:
The well-known m-terms (
Numerical solution
Source distribution method
The complex potential on the submerged surface of the vessel is the key to solving the hydrodynamic problem. It will be shown that once the potential is known, all the hydrodynamic coefficients required to obtain the vessel response, i.e. added mass, damping and excitation forces can be calculated.
To obtain a numerical solution, sources of unknown strengths are distributed on the surface of the body. The velocity potential function can be written in terms of the unknown source strengths as:
The unknown source strengths are calculated using the radiation and diffraction body boundary conditions separately by substituting Eq. (3.1) into Eqs (2.7) and (2.8). The resulting integral equation is:
The evaluation of matrix α in Eq. (3.5) and β in Eq. (3.7) requires integration of the Green function and its derivatives over the panel surface. Katz and Plotkin [25] give an analytical expression for integrating the singular but frequency independent part of the Green function,
The integration of the frequency dependent term
The collection of equations required for calculation of panel properties such as the normal vector, panel area and finally evaluation of the α and β matrices are given in [11,13] in further detail.
Hydrodynamic coefficients
Once the velocity potential is obtained at each panel, the hydrodynamic coefficients can be easily solved by calculating the pressure on the hull and integrating the pressure on the hull surface. The pressure on the hull can be found using the Bernoulli’s equation:
The incident wave excitation force also known as the Froude Krylov force is given by:
Added mass and damping at zero and infinite frequency
The added mass and damping coefficients for the frequency limits
The time dependent velocity potential is represented as:
Substituting
For both
For
The added mass and damping coefficients

Added mass (
The above mentioned numerical scheme is implemented in the code MDLHydroD written in FORTRAN programming language. All recent advancements in the potential theory field has been studied thoroughly during the development of the code. Keeping in mind the ease of use, the panel definition is obtained through commercial software [4] as a Geometric Data File format. This allows creating vessel geometry and studying its response about any point of origin on the hull easier and also encourage automated hull generation that can be used for hull form optimization purposes. Not requiring free surface discretization removes possible user error in deciding the size of the free surface domain and panelization errors near the hull waterline which may result in erroneous results. Using only the hull surface below mean waterline without surface discretization makes MDLHydroD robust, computationally efficient and useful for both manual and automatically generated hulls. However, this required using linearized free surface boundary condition which is a compromise as compared to Rankine source based codes with free surface panels. It must be recalled that the free surface non-linearities becomes significant beyond Froude number
The developed computer program MDLHydroD has been validated for a number of structures including simple geometries such as a floating hemisphere, box barge, spheroid and Wigley hulls as well as multiple ship forms and offshore platforms. The experimental and numerical results of Kashiwagi et al. [23] on a modified Wigley hull are compared for zero speed surge, heave and pitch motion responses.
The modified Wigley hull is represented mathematically as:
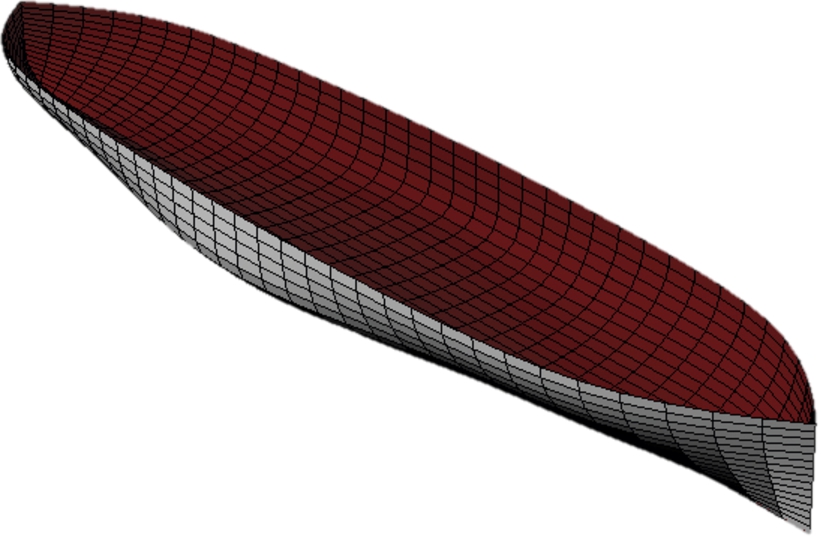
Panel model of modified Wigley I. (Colors are visible in the online version of the article;
Principal particulars of modified Wigley hull I
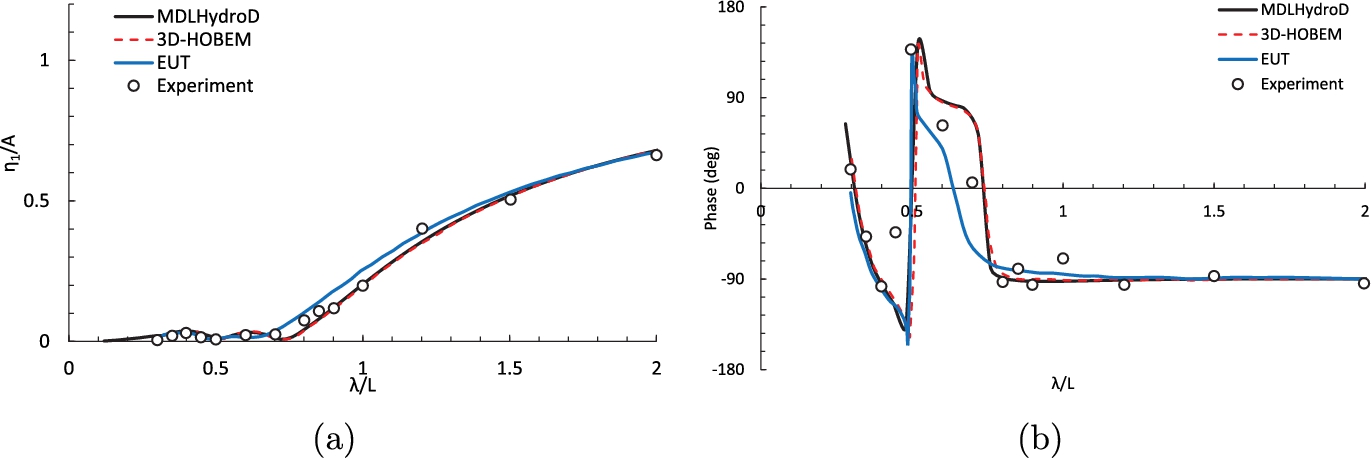
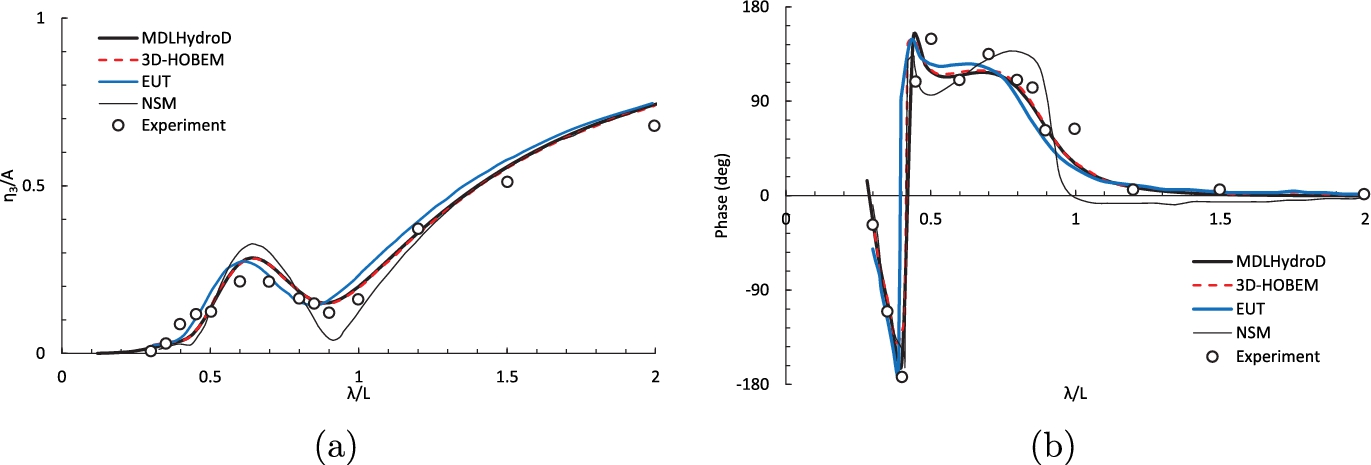
Surge motion amplitude (a) and phase (b) of the modified Wigley I model in head waves at zero forward speed. (Colors are visible in the online version of the article;
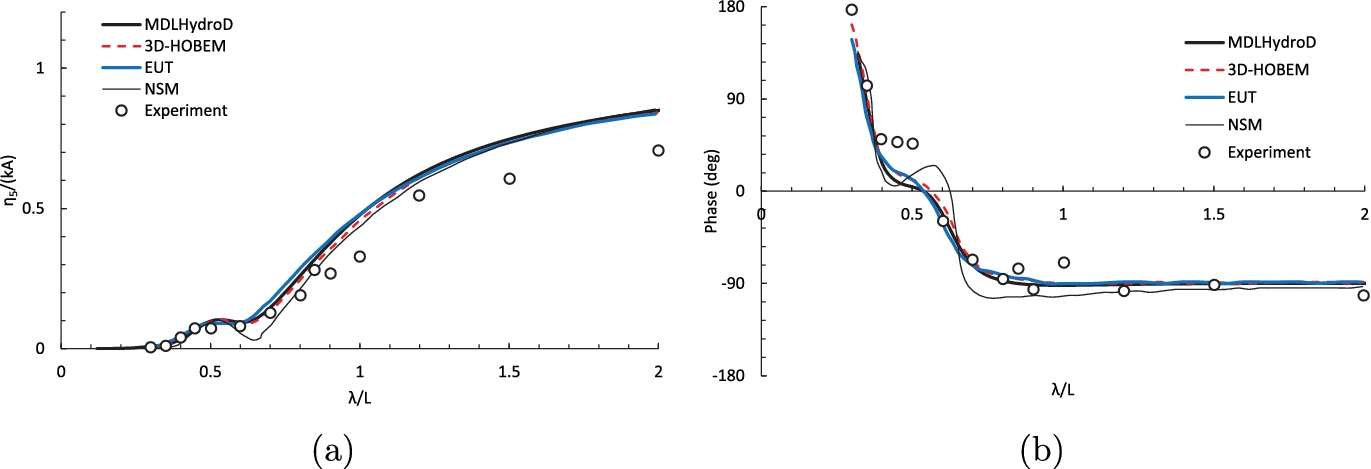
Heave motion amplitude (a) and phase (b) of the modified Wigley I model in head waves at zero forward speed. (Colors are visible in the online version of the article;
Pitch motion amplitude (a) and phase (b) of the modified Wigley I in head sea at zero forward speed. (Colors are visible in the online version of the article;

Panel model of modified Wigley II. (Colors are visible in the online version of the article;
Principal particulars of modified Wigley hull II
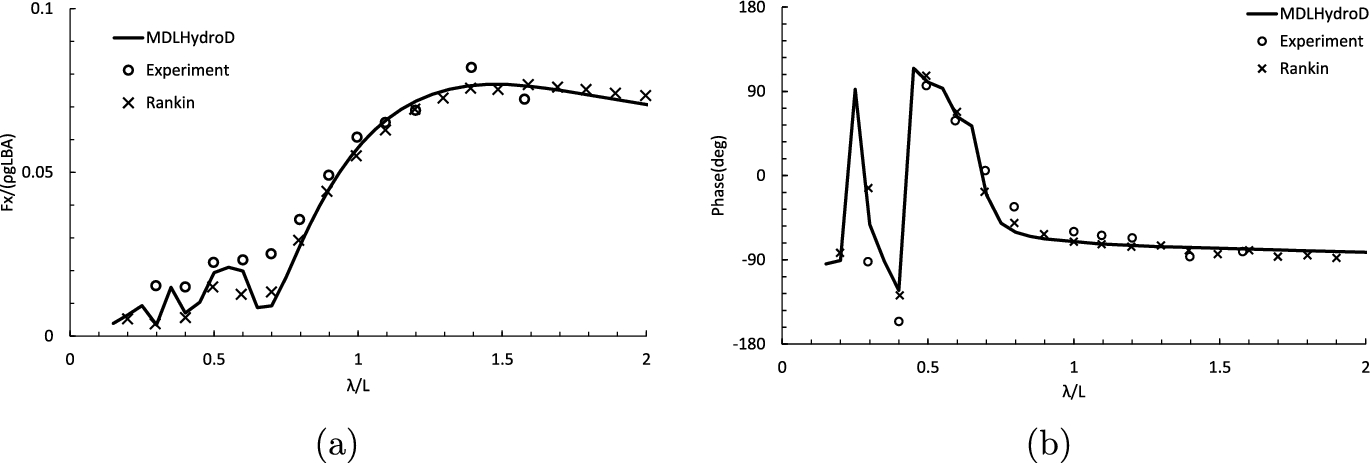
Surge excitation force amplitude (a) and phase (b) of the modified Wigley II in head wave with forward speed corresponding to
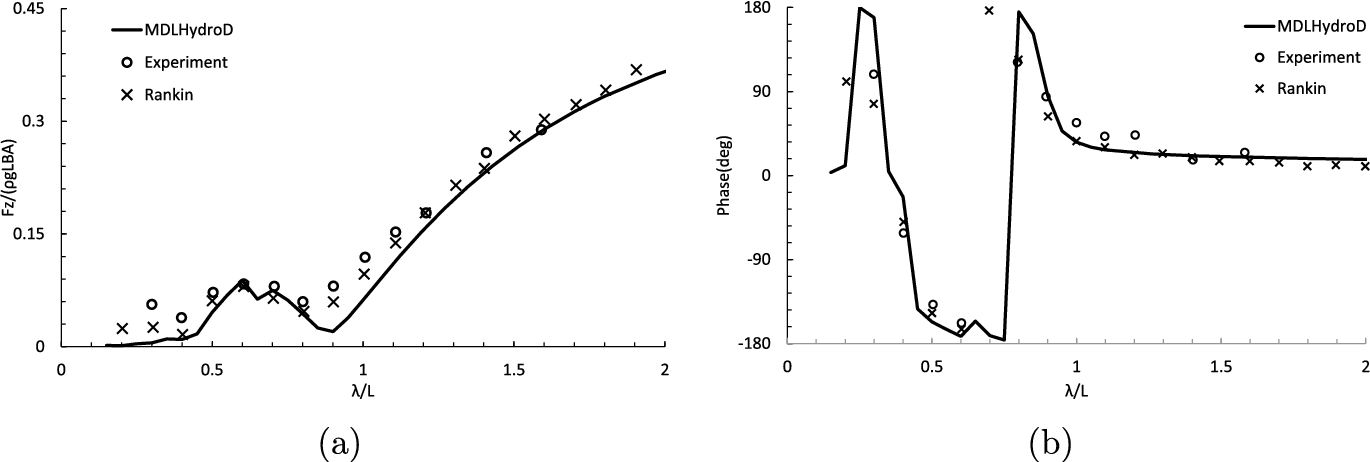
Heave excitation force amplitude (a) and phase (b) of the modified Wigley II in head wave with forward speed corresponding to
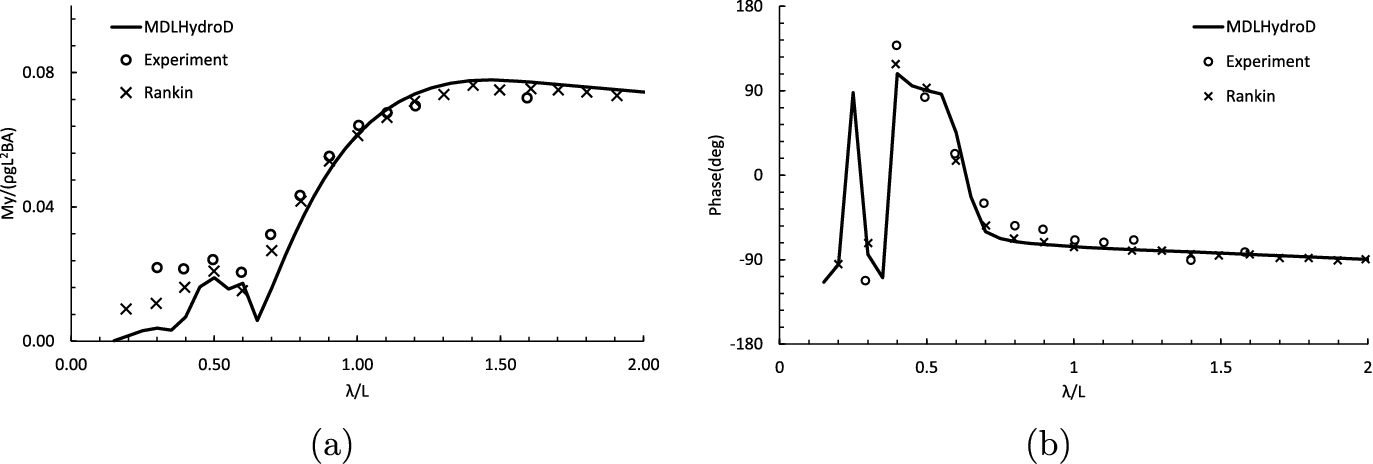
Pitch excitation force amplitude (a) and phase (b) of the modified Wigley II in head waves at forward speed corresponding to
Heave (a) and pitch (b) motion amplitude of Wigley hull III in head wave at

Panel model of KVLCC2. (Colors are visible in the online version of the article;
Principal particulars of KVLCC2
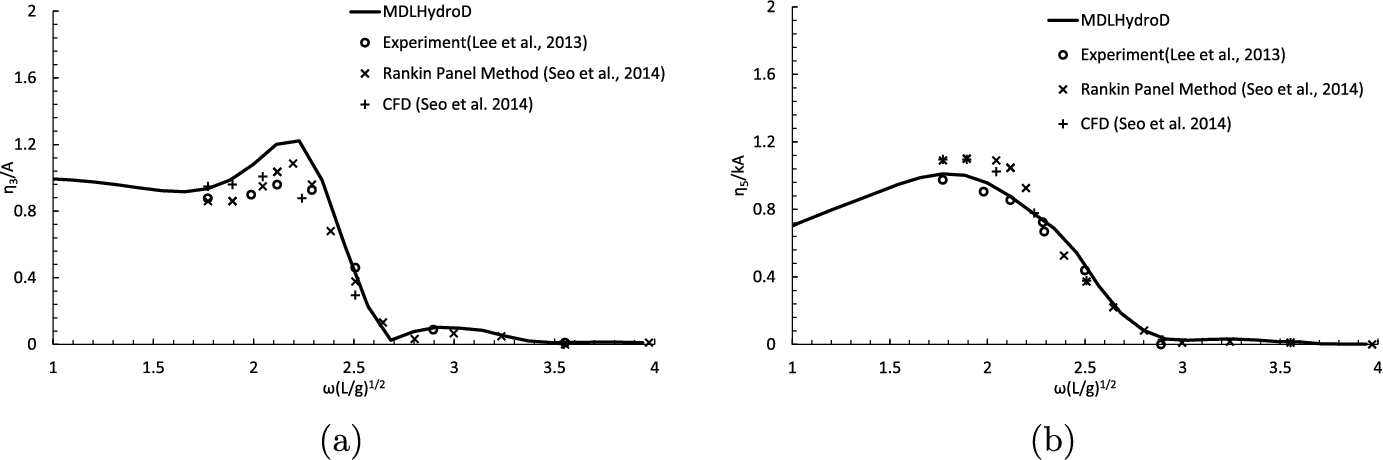
Heave (a) and pitch (b) motions of KVLCC2 in head wave at forward speed
Panel model of the S175 container ship. (Colors are visible in the online version of the article;
Principal particulars of S175
Another modified Wigley hull with the same mathematical hull surface description as Eq. (4.1) with,
The comparison of wave exciting force amplitude and phase on the slender Wigley hull (Fig. 8, Table 2) at forward speed corresponding to
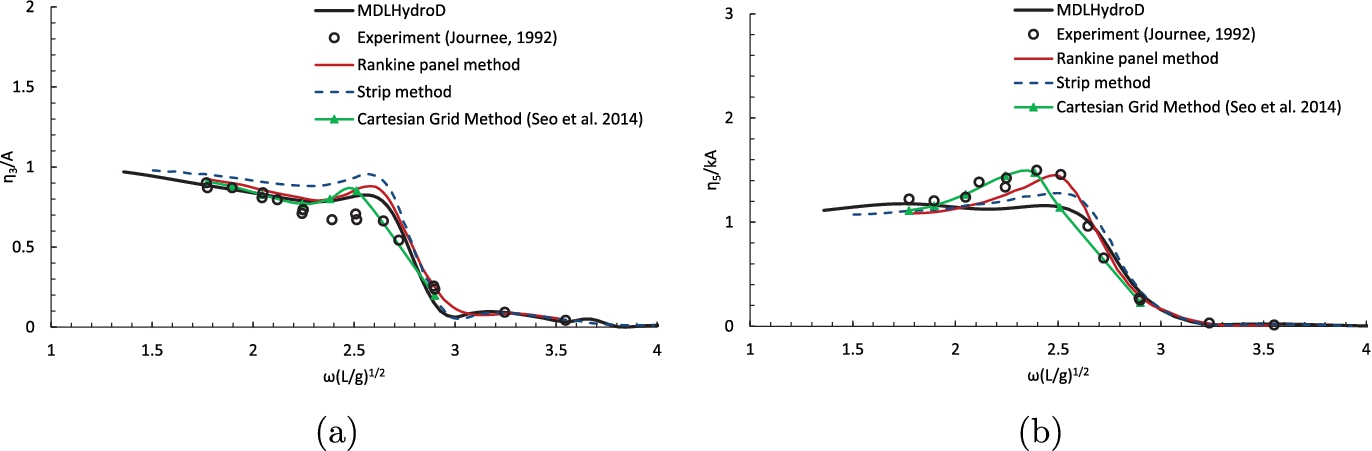
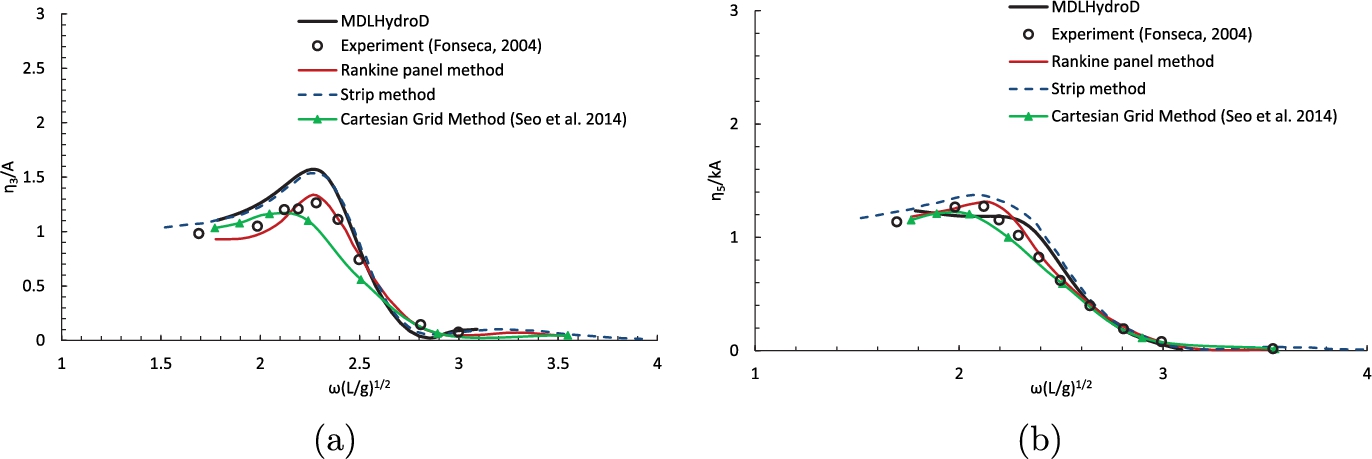
The model test results of Wigley hull III performed by Journée [22] were also compared with the developed code along with other published work by Seo et al. [43]. The heave and pitch motion comparison for the Wigley hull III is shown in Fig. 12. A full form tanker KVLCC2 is also analyzed at forward speed corresponding to
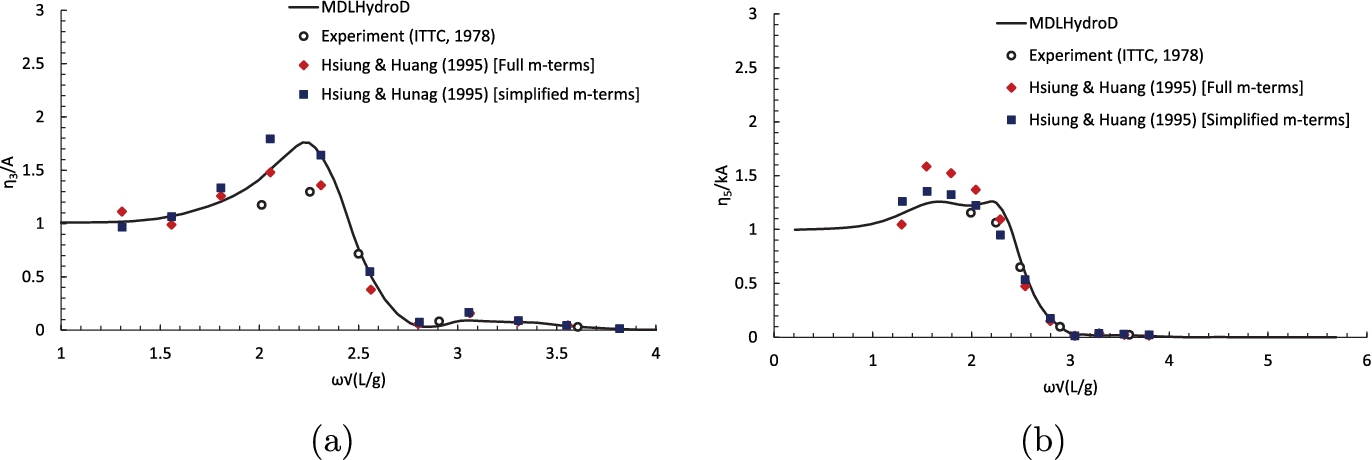
The forward speed case has been further validated against experimental result published in [8,21] and the numerical predictions of Hsiung and Huang [19] for the container ship S175. The vessel’s panel model is shown in Fig. 15 and the principal particulars are listed in Table 4.
Heave (a) and pitch (b) response of ITTC container ship S175 in head wave at
Heave (a) and pitch (b) response of ITTC container ship S175 in head wave at

Heave (a) and pitch (b) response of ITTC container ship S175 in oblique wave (
In head sea condition the heave and pitch motion amplitudes are compared for two forward speed cases with
Panel model of the KRISCO Container Ship. (Colors are visible in the online version of the article;
Principal particulars of KCS
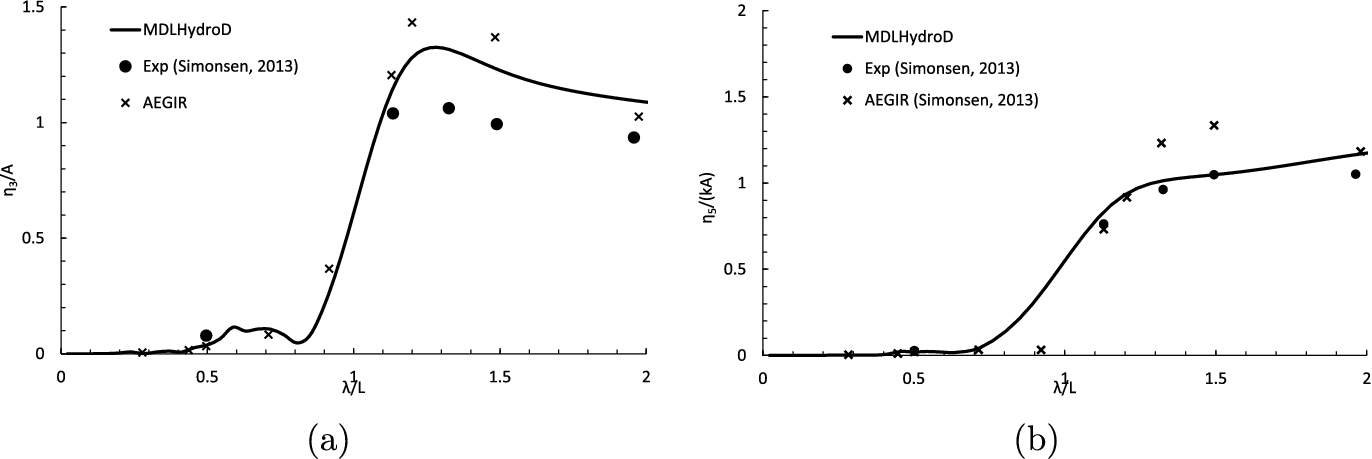
Heave (a) and pitch (b) response of KCS in head sea at
Heave (a) and pitch (b) response of KCS in head sea at

Heave (a) and pitch (b) response of KCS in head sea at
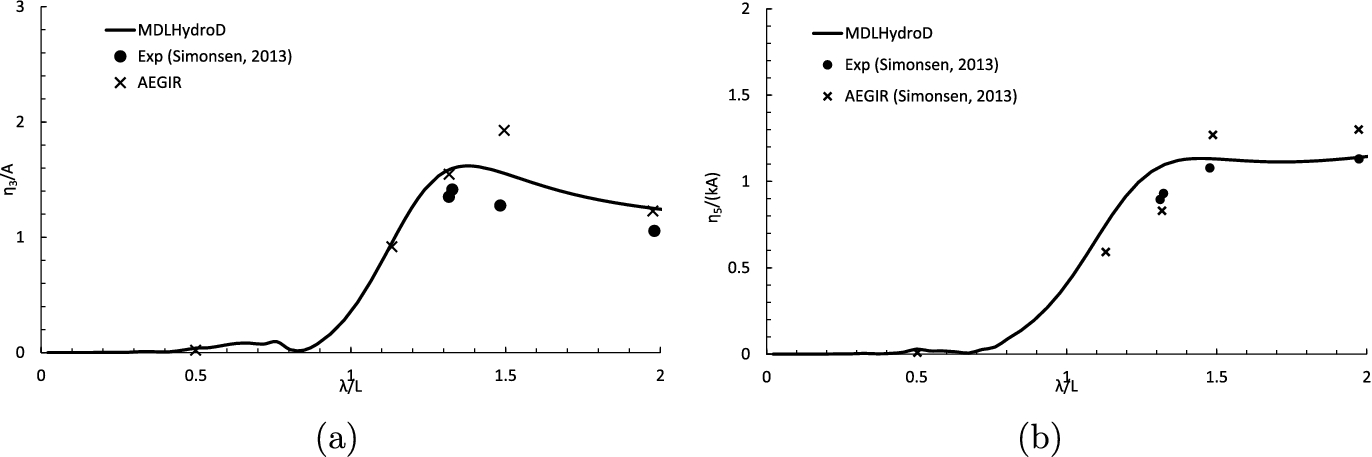
Finally, the KRISCO Container Ship (KCS) was analyzed and compared with the experiments performed by Simonsen et al. [44]. The panel model of KCS is shown in Fig. 19 and the principal particulars are given in Table 5. Three forward speed cases with
The comparison between the experimental and other presented numerical methods are found to agree reasonably well with the developed frequency domain program MDLHydroD. The author further extended the program for calculating second-order mean drift forces and added resistance of ships which is presented in [12,46]. An effort in developing time-domain response prediction tool using impulse response function that is based on MDLHydroD is also made. The details of this time-domain tool named SIMDYN is presented in [45,47].
A new numerical tool capable of calculating hydrodynamic force coefficients for ships with moderate forward speed in the frequency domain is developed. The effect of forward speed is included using the encounter frequency. The simplified m-terms in the radiation boundary conditions are applied. The zero speed infinite depth Green function is used in the source distribution in a quadrilateral panel discretization. Analytical expressions are used for integration of the frequency independent portion of the Green function and frequency dependent part is considered constant over a panel. The notable strengths of the developed computer program can be summarized as:
Only underwater hull surface is required for calculation, eliminating the requirement of free surface discretization. This makes the program suitable for use in hull optimization where an automatically generated panel needs to be analyzed.
A generalized coordinate system used rather than common assumption of origin at the waterline or at the center of gravity. This allows analysis of floating and submerged bodies using the same code.
The frequency independent part of the Green function has been evaluated analytically which enhance the runtime performance of the code.
Effect of forward speed is included in the hydrodynamic force calculations.
Added mass and damping coefficients can be calculated for zero and infinite frequencies with forward speed considerations. This is important for frequency to time-domain conversion using impulse response functions.
A common Geometric Data File (GDF) format is used for panel definition which makes the input files preparation for new vessels much easier and faster.
The run time of the developed code in a personal computer was found to be in order of a few seconds for a single frequency calculation of a large ship hull (2000 panels).
A number of validation studies were performed of which a selected few are presented here. The results were found to be in good agreement with experimental and other numerical results. The program has been used in further development of advanced hydrodynamic studies including non-linear time-domain response prediction and second-order force calculations.
Footnotes
Acknowledgements
The authors would like to thank Dr. F. Noblesse and Dr. K.A. McTaggart for their guidance during development of this project. This work has been funded by the Office of Naval Research (ONR) – ONR Grant N00014-13-1-0756. The authors thank Dr. Robert Brizzolara for facilitating the funding for this work.