
Abstract
Ships can experience serious difficulties in keeping a straight course when sailing in stern-quartering seas. Design modifications like the addition of stern passive fins, or the modification of active control surfaces, are common solutions to improve the ship course-keeping. However, the success of such design modifications depends on the delicate balance between the excitation forces induced by the waves on the appended hull, the stabilization forces provided by the lifting surfaces as appended fins, and the steering forces provided by the control surfaces. This research investigates which of these aspects of a ship design play a concrete role in improving the ship course-keeping in waves.
The study is carried out with the intention of looking at the different behaviors of the ship originating from different stern appendages configurations. Three modifications of stern appendages on three different ship hulls were investigated in various mild-to-rough sea conditions. The behavior of the vessels were simulated using a time domain, boundary element potential method, with the addition of semi-empirical formulations for the modelling of the stern lifting surfaces. The simulations were carried out in long crested irregular waves at three different direction, using the JONSWAP spectrum.
The results showed that although larger stern appendages improve the directional stability of relatively large and slow vessels, in most cases they worsen their course-keeping ability, increasing the yaw motions. For smaller and faster vessels instead, passive and active fins tend to improve the course-keeping, because at high speed the lift provided by the appendages stabilizes the vessel. This effect is compensated by the wave excitation force at lower speed. Similarly to yaw, the roll motions increases with larger stern appendages.
Keywords
Nomenclature
Flow incidence angle at the lifting surface [rad]-[deg] Stall angle of the lifting surface [deg] Drift angle of the vessel [deg] Maximum steering angle [deg] Steering mean rotational speed [deg/s] Autopilot proportional gain [deg/deg] Autopilot derivative gain [deg/(deg/s)] Wave length [m] Lifting surface aspect ratio [–] Statistical k-moment of population Wave direction [deg] Ship rotational speed vector [deg/s, deg/s, deg/s] Area of the lifting surface [m2] Ship directional stability index [–] Drag coefficient of the lifting surface [–] Lift coefficient of the lifting surface Drag force of the lifting surface [N] Lift force of the lifting surface [N] Force acting on the lifting surface [N] Froude number [–] Wave height [m] Significant wave height [m] Ship roll moment [Nm] Sway induced roll moment manoeuvring coefficient [Ns] Yaw induced roll moment manoeuvring coefficient [Nms] Ship yaw moment [Nm] Sway induced yaw moment manoeuvring coefficient [Ns] Yaw induced yaw moment manoeuvring coefficient [Nms] Root mean square Sway induced sway force manoeuvring coefficient [Ns/m] Yaw induced sway force manoeuvring coefficient [Ns] Variance of sample population Wave peak period [s] Ship speed [kn]-[m/s] Lifting surface height [m] Wave crest celerity [m/s] Lifting surface chord [m] Ship mass [kg] Ship yaw rotational velocity [rad/s]-[deg/s] Vector of the position of the lifting surface (ship frame) [m, m, m] Ship translational velocity vector [m/s, m/s, m/s] Flow speed at the lifting surface [m/s]
Introduction
The course-keeping is the capability of a vessel to keep a straight course and limit the motions in difficult sea conditions. Course-keeping problems are typically experienced in following and stern quartering seas. This is a manoeuvrability-in-waves aspect which is the result of a complex hydrodynamic equilibrium between the forces of incoming waves, hull and lifting surfaces as stern appendages. In normal operative conditions, a practical consequence of a disequilibrium of these contributions can cause a limitation of the course-keeping capability of the vessel in waves. This difficulty can be overcome by mild corrections of the autopilot or of the helmsman, but in more difficult situations the use of rudders at their full range might still lead to severe difficulties in keeping the desired heading. In heavy sea states, and in particular conditions of ship speed and wave characteristics, a poor course-keeping can lead to dangerous dynamic instability events like broaching-to.
Manoeuvrability of ships is considered during the design exclusively in calm water conditions. The International Maritime Organization has adopted minimum manoeuvrability requirements that must be satisfied by the ship design. One of the most important requisite of a vessel is, for example, the directional stability [25]: this is the ability of a hull to keep, with passive control means, a steady straightforward motion conditions after an external disturbance. At a first glance, directional stability may be directly connected to the course-keeping ability in waves. However, they show significant differences.
For example, the addition of stern fins can lead to the improvement of the directional stability of the vessel. An increase of the appendage size, although considered standard when dealing with course-keeping instability problems, leads to two opposite effects. If on one side the hull stabilization forces become larger, so do also the wave excitation forces. The wave excitation, or Froude-Krylov force, is the result of the pressure induced by the wave orbital velocities on the surface of the fin. In stern-quartering waves, this contribution has a destabilizing yaw effect on the passive appendages located near the hull stern (such as fixed skegs), with increasing magnitude near the wave free surface. Understanding how these two different effects balance each other is fundamental to understand whether a design variation is successful and leads to a better vessel behavior in waves or not. This mainly concerns the passive appended fins: different considerations must be done for active fins, as for rudders. The duality between stabilization and excitation effects must be coupled to the fact that a bigger rudder leads also to a better steering ability, improving the general course-keeping behavior of a ship.
Interest in the subject of ship course-keeping increased in the second half of 20th century [7,8,15–17]. In more recent years, almost the whole research published on the subject has investigated course-keeping by focusing on control systems [14,18,20,21,27,30,35–43]. Efficient auto-pilot settings and optimization algorithms have been employed to improve the controllability of the vessel, with the aim of reducing rudder activity, heading and roll variations. In this work instead, the problem is tackled differently. The behavior of common vessel designs in stern quartering seas is analyzed from a designer perspective: how can a certain stern appendages configuration influence the course-keeping ability of a ship? This question is relevant for high-performance vessels sailing in difficult environmental conditions. Rough sea states have adverse effects on the performance of the auto-pilot, and uncontrolled yawing of the ship can result in excessive undesired rudder movement. A too significant rudder activity might also excite the roll motion of the vessel. In those cases, it is crucial for the ship to possess a good inherent course-keeping ability.
Bonci [3 ,4] analyzed how a modification of the hull directional stability or of the effectiveness of the steering devices affected the behavior of a fast vessel in stern quartering seas, in relation to the occurrence of dynamic instability events (broaching-to). These modifications were applied in an “artificial” way, without modifying the geometry of the hull: external fictitious forces, representative of the contribution of both active and passive fins, were applied by means of the related maneuvering coefficients. On the contrary, in this work the design modifications are applied in a more physically accurate way. The realistic geometry of appendages and design variations is considered: this has the advantage to allow the estimation of the wave excitation forces acting on these surfaces.
The objective of this research is to investigate the balance between the contributions of stern appendages in terms of: stabilizing lift induced force, destabilizing wave induced forces, and steering ability. Although the hull shape is determinant of the course-keeping quality of the vessel, in common ship design processes the hull forms are already defined for other scopes other than manoeuvrability-in-waves issues. Manoeuvrability is only considered very late in the design process and any possible improvements to the vessel behavior can be achieved only by modifying the arrangement of appendages and not the hull forms. For this reason, the analysis of the stern appendages configurations appears very important for the course-keeping of ships.
Different stern appendage configurations were chosen and their effect on the course-keeping ability was analyzed. In order to take into account the widest possible range of ships, and therefore a variegate range of course-keeping issues, three vessels of different length, hull forms and operative scopes were taken in consideration. For the purpose of this work, that is to investigate the course-keeping quality of ships, these vessels are assumed to sail in mild-to-rough sea conditions (up to sea state 5). This research then neglects more extreme situations in which instability events could occur, with large yaw deviations and roll motions. The course-keeping ability is quantified in terms of statistics of stabilization forces, wave excitation forces, roll and yaw in irregular waves.
This work is entirely carried out numerically using a state-of-art time domain potential flow boundary element method. In order to keep into account the force on appendages, the model is coupled with semi-empirical formulations to compute the lift and drag provided appended fins. The flow speed at the appendages is the result of the local speed due to the translational and rotational velocities of the vessel, and the wave orbital velocities. In this way both stabilization (lift) and destabilization (wave) contributions are estimated by the simulation tools.
Numerical model
This work is entirely carried out numerically using a 3D time domain potential flow boundary element method. Time domain panel methods still give prove of being reliable tools in the prediction of the behavior of vessels in waves. They are particularly suitable in non-linear problems such as maneuverability-in-waves, for which more common frequency domain approach show troublesome limitations. Moreover, panel methods are the most practical tools for achieving reliable statistics within reasonable computational efforts.
The mathematical model used in the research is an extension of the method presented by Lin and Yue [26], and has been developed by Pinkster [28], Van Walree and De Jong [9,11,13,31–33] at Delft University of Technology and the Maritime Research Institute of the Netherlands (MARIN); throughout the years, this model has been widely used and validated for problem in following and stern-quartering waves [4,5,10,12,34,37].
The method makes use of a Green Function [19] to keep into account the surface effects. The surface effects originate from the hydrodynamic pressures due to radiated and diffracted waves. The calculation of the Green Function requires large computational time: for this reason, the Green Function is calculated on a fixed, linearized geometry that corresponds to the submerged geometry of the vessel in calm water. This greatly reduces the computational effort of seakeeping simulations. The diffraction and radiation loads are thus computed on a fixed geometry, regardless of the wetted surface variations due to the waves. Instead, the hydrostatic and wave excitation components of the total loads are computed on the actual submerged geometry in waves.
Of particular interest for this work are the forces computed on the appended lifting surfaces such as rudders and fins. Potential theory cannot estimate the viscous forces (lift and drag) produced by fins and foils. Therefore, semi-empirical formulations are implemented in the mathematical tool to estimate the appendages contribution to the total loads. The equations implemented in the mathematical model originate from the work of Inoue [19].
The fins lift coefficient [22] is expressed as function of the incidence angle α by
The term
Where
The mathematical model uses also two empirical coefficients to keep into account the interaction of the appendages with the hull. The coefficient
At this point it is possible to define the flow speed on the lifting surface:
Then, with the due corrections due to the interaction with the hull, it is possible to obtain the component of flow speed at the appendage in x, y and z directions:
In case of fins behind a propeller, as for rudders, a correction to the x-component of the flow is applied due to the flow acceleration given by the propeller:
Not the only flow speed due to the motion of the hull and the propeller wake are contributing to the force of the fins. Also the action of the wave is considered, by means of the orbital velocity vector
After having defined the flow speed component at the appended fin, it is possible to express the incidence angle α as:
The fin loads can be further corrected if they are not aligned in the z-direction (dihedral). These semi-empirical formulations are used hereby to model the appendages forces. In the case of central skeg, this formulation is combined with source panels. This combination is preferable to model the skeg force, as shown by Lena in [24].
Hull designs and environmental conditions
The vessels
Three standard hull designs were simulated in this research:
A twin shaft and central skeg fast displacement ship (FDS) of 100 m length. The hull is slender (L/B = 8) without round bilge. Similar hull forms are used for high-performance vessels as frigates. The hull forms of this vessel originate from the systematic series for high speed displacement ships [2,23].
A twin shaft and central skeg displacement ship (DS) of 78 m length. The hull is less slender than the FDS (L/B = 5.6), with a bulbous bow and round bilge. These are the typical hull forms used for the majority of motor yachts, passenger or merchant vessels.
A twin shaft and central skeg hard chine, V-shaped high speed craft (HSC) of 32 m length. These forms are typically used for fast transportation vessels, patrol and rescue operations.
The main geometric characteristics of the vessels and their weight distributions are summarized in Table A.1 in Appendix. Some considerations can be mentioned about the choice of these vessels.
All three designs are characterized by twin shaft arrangements and spade type rudders. The conclusions drawn in this project will then be less applicable to other stern configurations (single propeller or waterjets, for example).
Although with likely very different operational missions, the two hulls FDS and DS are both displacement vessels, thus they can be easily compared in a design configuration assessment. The HSC instead is representative of semi-planing and fully planing vessels. Due to its very different operational conditions, a straightforward comparison between the course-keeping behavior of the HSC and the other two vessels is not straightforward.
The FDS and the HSC are not equipped with any active roll stabilization system.
The DS is equipped with two sets of stabilization fins. For the purpose of this project they were kept passive.
Both the FDS and the DS are equipped with bilge keels.
The three hull forms were discretized in the mathematical model for the numerical simulations by means of quadrilateral panels. Figure 1 shows the hull shapes and the panel discretization of the vessels.

Discretization of the hull surface of the FDS (top), DS (center) and HSC (bottom) by means of quadrilateral panels used as geometry input of the numerical simulations.
The behavior in following seas of the three vessels was evaluated considering their original design and three variations of their stern appendages arrangement. The variations were applied in a consistent way on the three vessels, to evaluate their influence in the most comparable way possible. A summary of the stern appendage configurations, in term of location of appendages and area, is reported in Table A.2 in Appendix.
The following design variations, together with the nomenclature adopted in this report are presented below.
The original design of the vessels considered in this investigation. Enlargement of the skeg surface of 25% compared to the original design. This enlargement was achieved by extending the skeg of the vessels towards the stern. Implementation of fixed ventral fins. Ventral fins were added to the original designs considering their surface to be the same as for the rudders. They were installed at the same longitudinal position of the rudders and as much as possible to the side of the hull, remaining in the flat area of the stern just before the beginning of the bilge radius. Ventral fins were modelled using a semi-empirical formulation typically employed for lifting surfaces. Enlargement of the rudder surface of 25% compared to the original design. The enlargement was achieved by keeping the aspect ratio of the rudder the same. The control characteristics of the rudders remained the same as in the original design. Rudders were modelled using a semi-empirical formulation as done for the ventral fins.
Waves characteristics
In order to investigate the course-keeping capability of the vessels in consideration, operative mild to rough environmental conditions were selected, considered adequate and realistic for each one of the three vessels considered. Moderate cruise speeds were selected, aiming at simulating long haul sailing patterns, see Table 1.
Environmental conditions chosen for the course-keeping investigation of the three vessels
Environmental conditions chosen for the course-keeping investigation of the three vessels
For all three vessels and their design modifications, simulations were performed in irregular waves in stern quartering seas. JONSWAP spectra were selected, with a peak factor of 3.3. Wave directions of 30, 45 and 60 degrees were considered adequate to represent realistic stern quartering conditions.
For each vessel, three wave conditions were selected by choosing arbitrary but suitable values of the ratio
wave conditions with a wave peak spectrum celerity slightly higher than the vessel speed in the sailing direction, obtaining low but positive wave encounter frequencies;
a wave steepness (defined as wave height over wave length
These criteria led to the wave characteristics reported in Table 1 and Fig. 2.
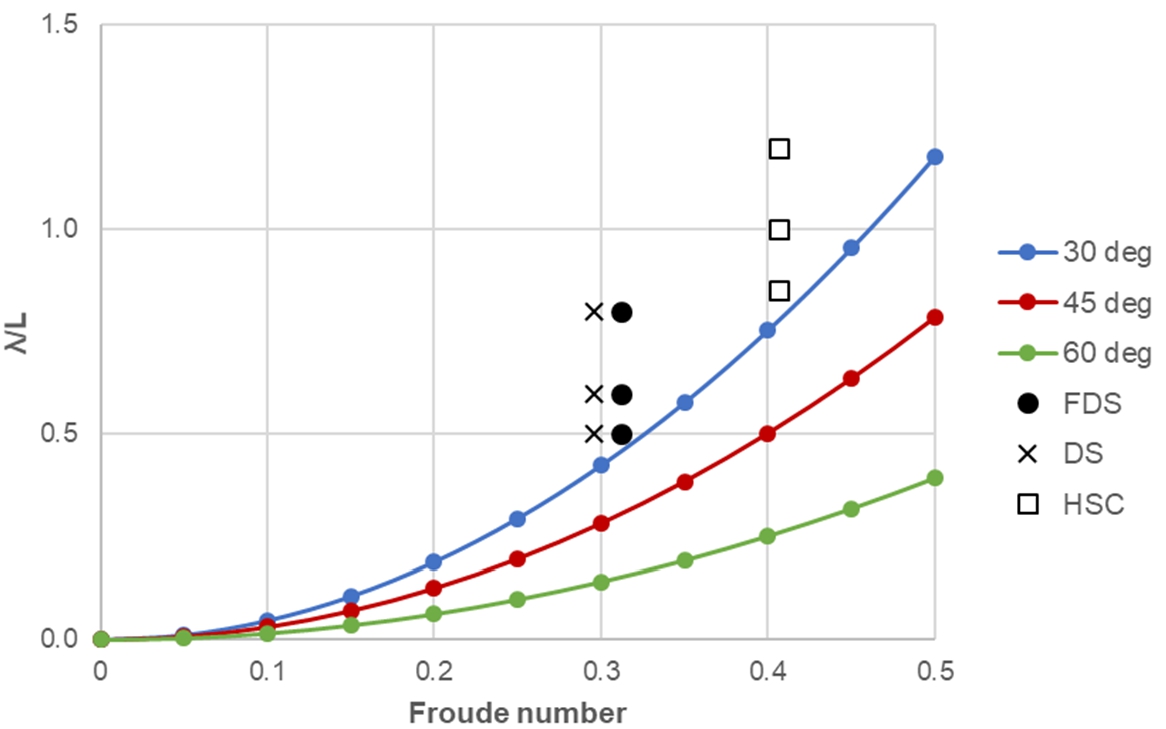
Visualization of the selected wave conditions for the three vessels as function of the non-dimensional wave length and Froude number. Wave crests travel faster than the vessel (following waves) when above the curves; on the contrary, below these curves the ship travels faster than the wave (fictitious head waves).
Figure 2 shows curves of equal vessel speed and wave celerity, expressed by:
It must be noted that no criteria was defined to rigorously select peak spectral periods above the curves of equal vessel speed and wave celerity. According to Bonci [3,4], course-keeping limitations and dynamic instability problems occur with low wave encounter frequency. However, it is difficult to define a priori wave conditions and speed combinations that would lead with certainty to one or another problem. For this reason, the wave selection for course-keeping analysis had as primary scope the selection of waves compatible with the characteristics and mission of each vessel.
For the course-keeping investigation of the vessels, three sets of simulations were carried out:
captive numerical tests in calm water;
semi-captive numerical seakeeping tests;
free sailing numerical seakeeping tests.
The underlying reason beneath the choice each simulation set and its objective are described in detail in the following subsections. The simulations in waves (2–3) are carried out for a time length such that at least 180 wave crests are encountered. This is a common standard to estimate reliable statistics of motions and loads of the ship in irregular waves. The results of these simulations are expressed as the root mean square (RMS) of the roll and yaw moments for the captive numerical tests, and roll and yaw angles for the free-sailing numerical tests.
Captive calm water simulations
In these simulations the vessels were kept fully captive in calm water. Several drift velocity and yaw turning rates were simulated in order to obtain the sway and yaw induced sway force, roll and yaw moment. Thanks to these simulations it is possible to assess the directional stability of the ship. These characteristics were evaluated for three speeds for each vessel; the complete captive tests conditions are summarized in Table 2.
Selected conditions for the captive calm water simulations of the three vessels
Selected conditions for the captive calm water simulations of the three vessels
The objective of these simulations is to predict the vessel maneuverability in calm water. In view of the analysis of course-keeping in waves, knowing the ship characteristics in calm water could unveil the differences between the two aspects of directional stability and course-keeping. Furthermore, being aware of the effects that a variation of the calm water maneuvering capabilities has on course-keeping in waves might prevent designers from carrying out complex analysis in waves.
From these simulations, several different hydrodynamic loads were estimated, originated from the vessel sway speed or yaw rate. The maneuverability hydrodynamic coefficients (
From these terms it is possible to estimate the stationary, calm water directional stability index:
For these simulations, also the bare hulls of the three vessels without any appendages were tested, with denomination Design_04, in order to estimate the maneuvering characteristics without stabilizing surfaces.
In these simulations the vessels were free to move in 2 degrees of freedom, heave and pitch, while the other degrees of freedom were captive. Differently from calm water captive tests, the vertical motions in waves can have a significant effect on the loads on the horizontal plane and in roll. This is due to the different pressure longitudinal distributions when sailing in waves. The wave conditions mentioned in Section 3.3 were simulated. Point of interest of these simulations was the statistics of the forces in roll and yaw acting on the appendages. It must be noted that these simulations were performed with rudders fixed at their rest position (zero degrees rotation). The steering effect is thus neglected, except for the contribution of the passive rudders surface exposed to waves induced pressures.
The objective of these simulations was to estimate the wave excitation loads acting on the vessels with different stern configurations. In fact, adding lateral area at stern can influence the total amount of the wave excitation and thus this information can help in the understanding of the course-keeping of ships. Together with the loads estimated in calm water (see Section 4.1), this analysis allows a better understanding of the ship dynamics when freely sailing in stern-quartering seas.
Free-sailing seakeeping simulation
In these simulations the vessels were free to move in 6 degrees of freedom under the action of stern-quartering waves. The wave conditions mentioned in Section 3.3 were simulated.
The autopilot of the rudders kept the vessels at the desired heading. Autopilot control coefficients were selected from MARIN database of model tests for vessels compatible with the selected hulls. These terms are listed in Table 3.
Steering and autopilot characteristics used for the three vessels in the free-sailing simulations
Steering and autopilot characteristics used for the three vessels in the free-sailing simulations
The objective of these simulations was to assess the course-keeping capabilities of the vessel with the different design configurations described in Section 3.2. Point of interest were the statistics of roll and yaw, the most representative motions to quantify the course-keeping capability. In particular, the yaw RMS is an indication of how the course of the vessel varies due to the action of the waves.
The uncertainty of the numerical results can be quantified in:
uncertainties related to numerical discretization and convergence errors due to the distribution of flat panels on the hull surface;
uncertainties related to the fact that the sample of 180 wave encounters, even if a common standard for seakeeping analysis, does not represent the reality of a sea state with typical duration of 3 hours.
De Jong in [9] utilized the same mathematical model for seakeeping studies. From that analysis it was shown that the forces and motions computed in waves converged for a number of panels distributed on the hull surface above 1000.
The uncertainty connected to the statistics of a finite sample can be estimated by calculating the variance of the sample RMS resulting from the simulations [1,6]. Let n (=180 wave encounters) be the sample size, within the population of size N. Therefore, the sample variance can be expressed as:
The RMS of a population distributed normally can be seen as the square root of the variance, i.e. a standard deviation with zero mean. The error can be then propagated to the square root of the variance:
In the present study, between 3000-4000 panels were used to discretize the hull surface, ensuring the convergence of the results. This means that no uncertainty originates from the panel discretization. A small variation of the initial number of panels would cause no differences in the final numerical outcomes. Instead, the uncertainty connected to the choice of 180 encounters is evaluated and added to the following plots and the plots in Appendix. The results of this analysis lead to ±5% uncertainty with respect to the outcome value (RMS) of the simulations. This means that an RMS of the roll/yaw motion angle of 10 deg is estimated with a maximum uncertainty of 0.5 deg.
Results
In the Appendix, the results of the simulations in stern-quartering waves, both captive and free-sailing vessels, are shown from Fig. A.1 thorough Fig. A.4 by means of histograms that summarize the complete set of simulations in terms of the root mean square (RMS) of the motions (for the freely sailing vessels) in roll and yaw, and the roll/yaw moments (for the semi-captive simulations).
The resulting RMS of the semi-captive simulations in roll and yaw moments
In this way, it is possible to evaluate exclusively the wave excitation loads caused by the variation of stern appendages configuration.
In the following subsections, the results of each simulation configuration are presented and discussed. Each value of the results is depicted with the uncertainty bars that were estimated by means of the considerations drawn in Section 4.4.
Captive calm water simulations
Figure 3 shows the directional stability coefficients of the three vessels under investigation for the different stern configurations and the bare hull (denominated Design_04), as function of the Froude number.

Directional stability index of the three vessels investigated with different stern appendages configurations.
In the original appendage configuration (Design_00), the vessels FDS and HSC appeared to be unstable at low speed; the DS instead was unstable for all the speeds investigated. For FDS and HSC, the increase of skeg size (Design_01) does not lead to a precise change in directional stability. this is probably due to the relatively small extension of the skegs on these vessels, compared to the exposed hull surface. The difference in the forces estimation acting on the design and on the extended skeg follows then within the numerical uncertainties of the calculation of the pressure on the panels at the trailing edge. However, the increase of the skeg size for the DS led to a better stability especially at high speed.
An addition of ventral fins of the same size of the rudders (Design_02) led to the best directional stability for the FDS and the HSC. An increase of 25% of the rudder size (Design_03) led to a better directional stability for all the vessels considered, even if the differences with the original appendage configuration are rather small. Each vessel without appendages (Design_04, bare hull) was unstable, being the directional stability coefficient C negative.
Similarly to the maneuvering hydrodynamic coefficients, the terms in roll can be obtained, namely

Sway induced roll moment coefficient Kv of the three vessels at different designs of stern configurations. Kv is negative because the drift motion is towards portside (positive), causing a heeling in the same direction (negative).
The addition of the ventral fins (Design_02) increases the directional stability of the vessel, but at the same time increases the roll moment. This effect is more significant for FDS and HSC. When drifting or rotating, appendages located deep below the water surface can cause a roll moment in the same direction of the drifting motion.
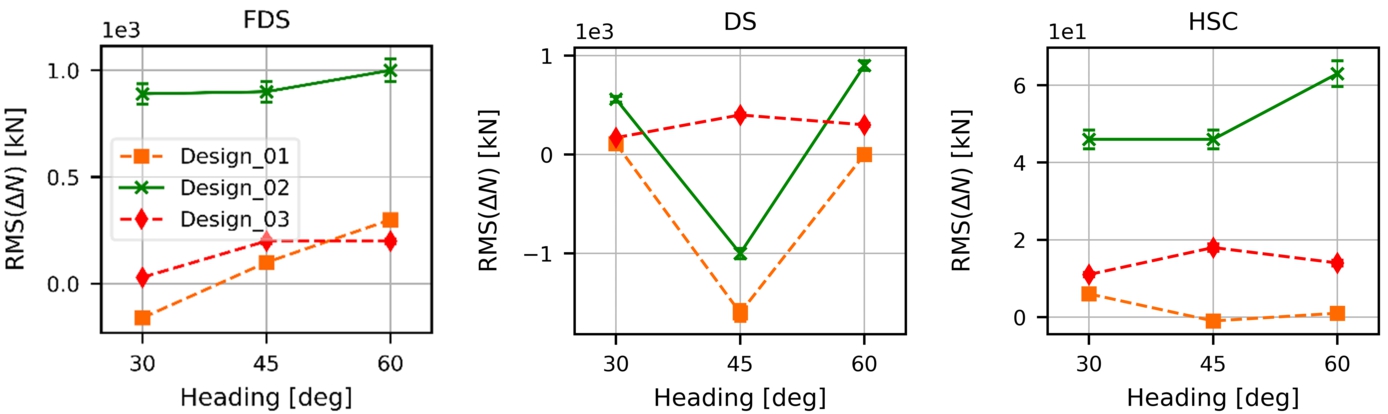
Yaw moment RMS difference relative to the original stern configuration, as function of wave direction;
The largest transversal force, roll and yaw moments were calculated at the higher sea states. The dependency on the heading is clear for all cases: the highest roll and yaw moments are obtained for 60 degrees wave direction. Figures 5 and 6 show the results of these simulations at the highest sea state for each vessel, at 60 deg of wave direction; even if less visible, similar considerations can be done for the other conditions.
Figure 5 shows that for all three ships the largest increase of the RMS value of the yaw moment N was found for the addition of the ventral fins (Design_02). This is due to the largest exposed area at the stern.
Figure 6 shows that contrarily to what happens for the yaw moment, the addition of ventral fins (Design_02) causes the largest decrease the RMS value of the roll moment. This is due to the additional lateral area below the water surface, causing a roll moment against the incoming waves. In these simulations, the motions in roll and in yaw were kept fixed.

Roll moment RMS difference relative to the original stern configuration, as function of wave direction;
As in the semi-captive simulations, the differences in the behavior of the vessels sailing freely in waves caused by the stern appendage configurations are more significant at the higher sea states. The consideration made in this section are common for all sea states, with only very slight differences. Only the highest sea states are shown in the following figures because the differences are more visible. The complete set of results is reported in the Appendix.
For FDS and DS, it seems that any design variation that increases the exposed surface at the stern is not significantly positive in terms of yaw RMS. From the results it is possible to see that often the original design is the one performing better, or, at least, it remains very close to the best results achieved. The design variation that gives the better results, especially with severe sea states, is the increase of the rudders surface (Design_03). However, for the HSC, the addition of ventral fins (Design_02) is a very effective way of reducing the yaw RMS, especially with small wave direction angles (30 and 45 degrees). For all the three vessels, the contribution of the skeg is limited and often detrimental compared to the original design. These results are shown in Fig. 7 for the highest sea state.
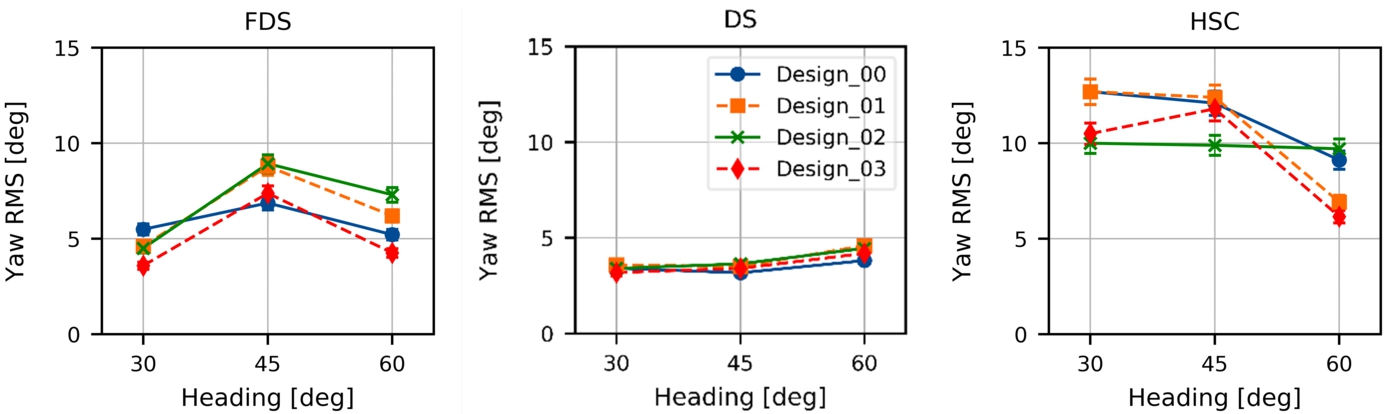
Yaw angle RMS, comparison of the different stern configuration as function of wave direction;
The yaw response does not show a clear dependency to the wave direction. This can have several reasons, related to the activity of the rudders or to the encounter frequency of the waves on the vessels. In most cases, a low encounter frequency leads to large yaw motions experienced by the ship, and this can happen at lower wave directions. The severity of an undesired yaw motions depends not only on the absolute value of the wave destabilizing force acting on the vessel, but also on its duration: at low encounter frequency, the duration of application of this destabilizing force is longer, thus increasing the magnitude of the yawing motion.
Differently from the yaw, the wave direction has a stronger influence on the variation of roll RMS. In principle, increasing the wave direction increases also the roll for all three vessels: this is very clearly visible for FDS and DS. As shown in Fig. 8 for both FDS and DS, the larger rudders (Design_03) cause the largest roll response, whereas it seems that the original design is the one with less roll. This result is opposite to what found in the semi-captive simulation set (see Fig. 6), in which the roll moment response of Design_03 is lower (negative in relative value) than the original design.
The HSC results are more scattered and a more visible variation of the response with different stern configurations is visible. Especially with large wave direction angles (45 and 60 degrees), larger rudders tend to reduce the roll response compared to the original design. Ventral fins (Design_02) contribution is somewhat unclear.
Although adding ventral fins (Design_03) proved to be the best choice to improve the directional stability of the three vessels, additional lateral area is not beneficial in stern-quartering seas: ventral fins addition showed, in most of the cases, the largest yaw RMS in stern-quartering waves (see Fig. 7 and Fig. A.4 in Appendix). This is reflected in the semi captive simulation results, where this design variation leads to the highest wave excitation yaw moment because of the larger exposed area at stern (see Fig. 5). What happens on the HSC is however slightly different. Results of captive simulations in calm water confirm also for this fast hull a significant improvement of the directional stability with ventral fins. Results of the semi captive simulations in waves show an increase of the wave excitation forces. However the course-keeping behavior in free sailing simulations shows a significant improvement compared to the base design. This is probably due to the Froude number, slightly higher compared to the FDS and the DS, that leads to a larger contribution of the lift forces generated by the ventral fins compared to the negative effect of the higher wave excitation forces.
Although the large influence of the control settings on the course-keeping behavior of the vessel is well known, this aspect was on purpose left aside in this investigation. It was seen that larger rudders prove to be effective on the HSC and only in some conditions on the FDS, while on the DS no significant advantage is noted. It is interesting to see that the FDS, the one characterized by the most aggressive autopilot coefficients, experiences only mild advantages by larger rudders (see Fig. 7). A possible conclusion is that it is much more effective to focus on the control of rudders, more than on their size, at least for what concern course-keeping in waves.
A variation of relative incidence angle with the wave seems to have a far more significant impact on the course-keeping of vessels than the modification of the design of the appendages stern arrangement. The dependency of the wave excitation forces on the wave direction is very clear from the semi captive simulations in waves. With respect to the free sailing simulations results, this conclusion is still particularly true for the FDS and the HSC, less for the DS that shows a more flat yaw response as function of the wave direction angle. This conclusion is particularly important: in some way it can save very expensive design modifications that could only have a significant impact on a very narrow band of wave directions.
The addition of lateral area at stern decreases the roll moment (see Fig. 6). This is due to the fact that the appendages are located under the water and thus lower than the CoG of the vessels, thus generating a roll moment that opposes the one acting on the hull. However, when freely sailing, the roll RMS increases with the larger lateral area at stern (see Fig. 8): this is due to the overall behavior of the vessel, that is governed also by the yaw motions and the rudder activity. In fact, an increase (or decrease) in the roll is accompanied by an increase (or decrease) in the yaw motions. And an increase in yaw motions leads to more active rudders, that influence the roll dynamics significantly. In stern-quartering seas the rudders, that try to compensate for the yaw deviation, have a negative influence on the roll motion of the ship.

Roll angle RMS, comparison of the different stern configuration as function of wave direction;
Following the presentation of the results and the discussion, the main conclusions of this work can be summarized.
Directional stability in calm water does not lead necessarily to good course-keeping capabilities of the vessel. Although adding exposed lateral surface at the stern increases the directional stability, it is not a positive solution to improve the course-keeping stability of the ship, especially for relatively slow displacement vessels. For slower ships with a relatively limited draft at the stern, the additional wave excitation forces compensate to some extent the positive additional stabilization effects induced by the appended fins. For such ships, a change of relative incidence angle with the wave seems to be a much more effective solution.
For faster and smaller vessels, adding both active or passive fins at the stern can reduce the yaw motion. This is due to the fact that at higher speed the stabilizing contribution of fins is more effective.
The extension of the skeg, although positive in increasing the directional stability in calm water for the DS, does not give any positive contribution in course-keeping in waves in most of the cases considered.
Enlarged rudders show a modest positive contribution in the directional stability in calm water. In waves they give positive course-keeping contributions only for the HSC. This suggests that focusing on rudder control can be more effective than on rudder size in terms of course-keeping, at least for bigger and slower ships.
An addition of fins or an increase in size of the appendage lateral area leads to increased roll response. This result is counterintuitive when looking at the roll moment acting on the appendages (see Fig. 6): an increase in roll motion when freely sailing is therefore explained by the fact that also the yaw (and thus the control devices activity) increases with the addition of lateral area at the stern.
The results of this study have been carried out using a potential flow, boundary element method. In principle, the ship motions variation trends in following seas obtained by modifying the appendages are independent from the mathematical model. Different time domain mathematical models for the hull force computation (strip theory, parametric) would only change the magnitude of the total motions and force of the vessel, but would not change the outcomes in qualitative terms.
All the variations of the vessel behavior in following seas are due to the appendage variations, therefore are due to the mathematical model used to calculate the fins force contribution. The mathematical methods for stern fins force prediction described in Section 2 can be used in future research as starting point for similar comparative assessment, net of the mathematical used for the computation of the hull force.
However, in order to judge the benefits given by a certain stern configuration design, it is necessary to be aware of the effects of an appendage modification also in quantitative terms. The quantitative assessment of stern configuration variations was out of the scope of this study. The objective of this paper was to purely compare the variations of stern appendages in the behavior of various hull shapes sailing in following seas. Mathematical models must be tuned upon the availability of model tests or full scale trials data in order to assess reliably the benefits (or disadvantages) of a design choice. This must be object of future research.
Long crested irregular waves have been chosen throughout each simulation carried out in this study. The effect of multi-directional, short crested seas must be still assessed. This appears particularly important in near costs or in return-to-port operations.
Footnotes
Appendix
Location with respect to geometrical origin of hull (ordinate 0, center line, bottom) and area of appendages of each ship design investigated
| Design | Attribute | FDS | DS | HSC |
| Skeg original (Design_00) | Position [m,m,m] | [19.29, 0.0, 0.48] | [10.5, 0.0, 0.85] | [8.89, 0.0, 0.12] |
| Total lateral area [m2] | 19.63 | 31.8 | 0.8 | |
| Skeg modified (Design_01) | Position [m,m,m] | [17.05, 0.0, 0.56] | [8.53, 0.0, 0.975] | [8.39, 0.0, 0.14] |
| Total lateral area [m2] | 24.54 | 39.75 | 1 | |
| Ventral fins (Design_02) | Position [m,m,m] | [1.803, ±4.48, 1.1] | [0.0, ±4.27, 1.28] | [0.895, ±3.0, 0.8] |
| Total lateral area [m2] | 5.67 | 6.30 | 1.68 | |
| Rudders original (Design_00) | Position [m,m,m] | [1.803, ±1.95, 1.1] | [0.0, ±2.36, 1.28] | [0.895, ±1.45, 0.8] |
| Total lateral area [m2] | 5.67 | 6.30 | 1.68 | |
| Rudders modified (Design_03) | Position [m,m,m] | [1.803, ±1.95, 1.1] | [0.0, ±2.36, 1.28] | [0.895, ±1.45, 0.8] |
| Total lateral area [m2] | 7.08 | 7.88 | 2.10 |