
Abstract
Electromagnetic acoustic transducers (EMATs) are non-contact ultrasonic transducers used to generate ultrasonic waves directly in the tested metal samples, suitable for special situations like testing moving or hot metal solids. EMATs rely on electromagnetic coupling, and the transduction efficiency of EMATs is relatively low, so it’s crucial to improve their performance through building accurate models and implementing structural optimisations. Modern evolutionary optimization algorithms involve a number of evaluations of the objective function of the optimization problem, so it’s necessary to explore surrogate models to reduce the time consumption during evaluation of the computationally expensive objective function, especially when the function corresponds to complex numerical models, like the EMAT model. We focused on the application of Kriging surrogate model (DACE) in EMAT modeling in this work. The formulations of the DACE model were reviewed, then the model of an omnidirectional EMAT was introduced. Three methods to calculate the amplitudes of the displacement components were discussed and compared, including the time-domain method, the multifrequency method (with FFT/IFFT processing), and the single frequency method applying directly the phasors. The DACE model of the EMAT was then built to predict outputs on a discrete grid of the design variables. Finally the obtained DACE model was used as the surrogate model in the optimization of the EMAT driven by the simulated annealing algorithm. With the DACE model, the total time consumption of optimization of the EMAT was reduced greatly.
Keywords
Introduction
Conventionally, piezoelectric transducers are used in ultrasonic testing to generate ultrasonic waves in the solid sample under investigation. These transducers rely on liquid coupling to transfer the generated waves into the sample, and uncertainty exists because of the coupling. Other limitations include the required preparation of the surface of the sample when it’s rough, and difficulty in testing moving and hot objects.
As a promising alternative to the piezoelectric transducer, electromagnetic acoustic transducer (EMAT) is a kind of non-contact transducer, usually composed of a bias magnet, a coil fed with high frequency alternating current, and the tested metal sample itself. EMATs rely on electromagnetic mechanism to transfer energy directly into the metal sample, without requirement of liquid coupling, and they are becoming widely used in metal material testing, including some special situations like testing moving or hot samples. Another advantage of EMATs is that with different configurations of the bias magnetic field and the coil, various types of ultrasonic waves could be generated. In spite of these benefits, the energy transduction efficiency of EMATs is relatively low compared with that of the piezoelectric transducers. So it’s always imperative to study the mechanism of EMATs further and build accurate and efficient models, and strive to improve their performance.
The model of an EMAT is multiphysics in nature, involving coupling of the electromagnetic and elastodynamic fields. This fact renders modeling of EMATs relatively difficult, and it has been an attractive topic in the previous years. Here we mainly focus on the numerical models. Ludwig and Dai conducted transient analysis of a meander coil EMAT placed on isotropic non-ferromagnetic half-space, assuming uniform static magnetic field [11]. Jafari-Shapoorabadi et al. studied in detail the controlling eddy current equations and argued that the previous work using the total current divided by the cross section area of the conductor as the source current density is equivalently applying the incomplete equation, and this means ignoring the skin effect and the proximity effect [7], while we proved the opposite in [25] via customising the underlying integro-differential or normal differential equations. Shi compared three different definitions of the current density with weak formulations [19]. Garcia-Rodriguez et al. implemented both un-coupled and coupled FEM codes for EMAT simulations in 2D geometries [5]. Dhayalan and Balasubramaniam used the FEM package COMSOL to build the electromagnetic model of a meander EMAT, and the simulated Lorentz force was exported to another package Abaqus as the driving force to excite Lamb waves [2]. The method was later extended to spiral coil EMAT generating bulk waves [3]. The above-mentioned modeling work only involves non-magnetic materials. There is also some initial work on modeling EMATs used to test magnetic material, while we will not discuss further here.
One possible way to improve the performance of EMATs is through optimal design of the structural parameters of the EMATs. The work on optimizations of EMATs is still rare. Mirkhani et al. conducted a parametric study of an EMAT composed of a racetrack coil, by varying the ratio of the width of the magnet to the width of the coil, and found that if this ratio was set at 1.2, the amplitude of the ultrasonic beam would be improved [12]. One design variable and one objective function were used in this optimization, accomplished only through observation of a set of curves corresponding to different design variables, instead of using a real optimization algorithm. Seher et al. optimized a spiral coil EMAT using genetic algorithm optimization procedure in the global optimization toolbox of Matlab [17, 18]. The ratio of the amplitude of the A0 mode Lamb waves to that of the S0 mode waves was selected as the objective function to be maximised, i.e. preferably generating the A0 mode. We extended the problem to multi-objective optimization in [23].
Modern evolutionary optimization algorithms involve a large number of evaluations of the objective function of the optimization problem. Quite often the evaluation of the objective function is time-consuming, for example, when the function corresponds to an underlying numerical model, like the EMAT model. Instead of sticking to the original computationally expensive model, an alternative plan is to build an approximate model from some known input/output data sets first, and then substitute it for the original model in optimizations. The approximate model, called surrogate model, metamodel, etc., should mimic the behavior of the simulation model as closely as possible while being computationally cheaper to evaluate. The surrogate models are already used in electromagnetics problems [22], but still very rare in ultrasonic applications, not to mention our hybrid and multiphysics modeling of EMATs. This situation motivates us to study and apply the surrogate models to the optimization of EMATs.
One particular surrogate model that we’re interested in is Kriging by Danie G. Krige, originating from geostatistics. In this method mathematical statistics was applied to the spatial evaluation of orebodies, which helped improve ore evaluation techniques and reduce the financial risk of investing in mining projects. Kriging surrogate model is flexible because of the wide range of spatial correlation functions available, and it can approximate linear and non-linear functions equally well [20]. The DACE (Design and analysis of computer experiments) is one implementation of Kriging in computer experiments with deterministic outputs, proposed by Sacks et al. [15]. Here ’deterministic’ means that for one set of inputs, no matter how many times we repeat the computer experiment (here the numerical model of the EMAT), it will always generate the same set of outputs. The DACE is data-driven, since some known input/output data pairs are required as prior knowledge.
In this paper, we review the theory of the DACE model first, then summarize the underlying equations of an axisymmetric EMAT working on the Lorentz force mechanism and introduce the specifications of an omni-directional EMAT model (implemented in COMSOL) and possible approaches to calculate the amplitudes of the displacement components, to be used to compute the output of the model. The DACE model is then applied to implement prediction of the output (the objective function). Finally the DACE model is used in optimization of the proposed EMAT driven by the simulated annealing algorithm. The formation of the optimization problem and the parameters of the EMAT are similar as [17, 18], but this is only for convenience of comparison with these previous work. The methodology could be easily applied to other EMATs with different structures and parameters, if some conditions are satisfied.
DACE – The Kriging surrogate model
For convenience, we restrict the number of output variables to one, i.e. the model has a scalar output. Supposing
in which
The random process
in which
in which
Before prediction of the output at untried input data, suppose the experiment is repeated
Evaluated at the input data set
Then from Eq. (1), we have
Suppose the predictor is linear,
in which
With the random vectors (
The mean squared error (MSE) is,
The unbiasedness condition of the predictor requires that
With this condition, the MSE is simplified as,
If
and the correlation vector between the input data set and
then the MSE is,
To minimize the MSE with respect to
The gradient vector with respect to
The necessary condition for optimality is that this gradient is equal to zero vector, together with the unbiasedness constraint, we have,
in which
Then the predictor in Eq. (5) is,
in which,
Now the MSE is,
in which
Assuming
in which
If the PDF
gives the same result as Eq. (18). While
leads to
For implementation of the DACE model, we choose a Matlab toolbox bearing the same name of ‘DACE’, developed by Lophaven et al. [14].
Formulations of the EMATs
The basic equations for the electromagnetic field simulation in the study of EMATs are Maxwell’s equations [6],
These equations are Faraday’s law, Ampere-Maxwell law, Gauss’s law for electric fields and Gauss’s law for magnetic fields, respectively.
To solve Maxwell’s equations, another set of equations called the constitutive equations is needed,
in which
With the magnetic vector potential (MVP)
in which
For 2D axisymmetric field simplification assuming
This equation is a diffusion equation describing the eddy current phenomenon in cylindrical coordinates. Now the eddy current density term is
With total current
in which
For steady state or frequency-domain analysis, the phasor notation is adopted,
in which the dots on
The equations describing the generation and propagation of the ultrasonic waves in an elastic solid are [1],
These equations are equation of motion, Hooke’s law and strain-displacement relation respectively.
For homogenous and isotropic media, we have Navier’s equation,
Here
The link between the electromagnetic field and the elastodynamic field is the volume Lorentz force density defined as,
in which
Further details of the formulations given here could be found in [24].
In this work we consider an omnidirectional EMAT composed of a spiral coil and a cylindrical permanent magnet, to generate Lamb waves in a plate. The coil is composed of tightly wound copper wires, so both S0 mode and A0 mode Lamb waves will be generated. In this work, the aim is to generate A0 mode Lamb waves, so we build the model bearing this preference in mind.
The complete EMAT model is composed of one magnetostatic sub-model describing the magnetic field of the permanent magnet, one eddy current sub-model analysing the eddy current phenomenon accompanied by the skin and proximity effects, and one elastodynamic sub-model for the simulation of the generation and propagation of Lamb waves in the plate. The two electromagnetic sub-models share one geometry containing the air, the inner section of the plate, the copper wires, and the permanent magnet, as in Fig. 1. Note that in this geometry only the inner section of the full plate is modeled. The elastodynamic sub-model has its own geometry, only containing the full plate. The Lorentz force calculated from the two electromagnetic sub-models is transferred to the elastodynamic sub-model as the driving force of Lamb waves.1 With these two geometries, the structure of the model is very clear. Additionally, we can use different meshing rules for these two geometries, according to the respective physics. This two-geometry treatment is valid because the Lorentz force is local in the region of the plate just under the transducer.
The geometry of the electromagnetic sub-models. This geometry is used for magnetostatic analysis and eddy current analysis.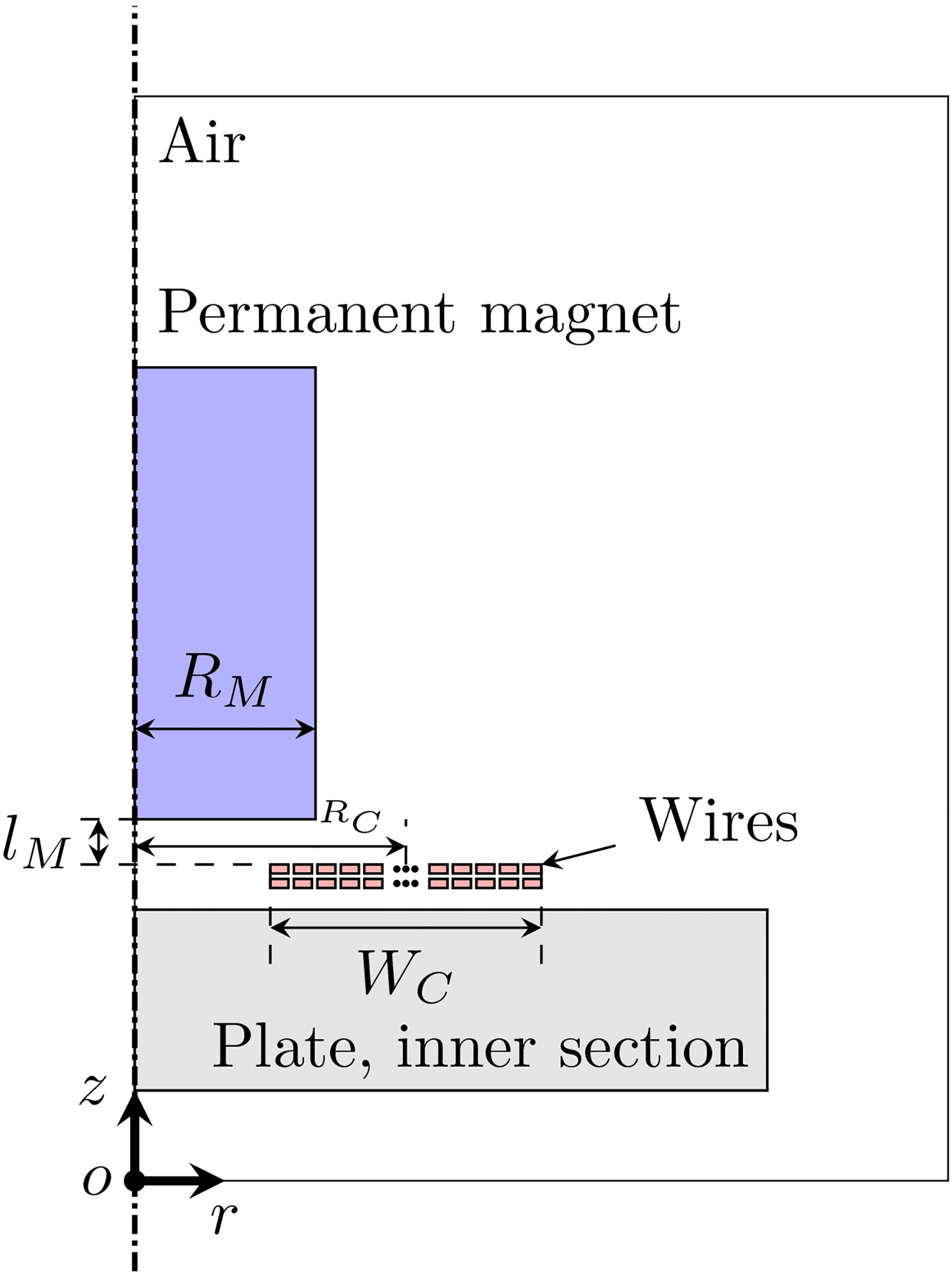
In Fig. 1, it’s only necessary to consider the region where
in which
The geometry of the elastodynamic sub-model simply contains a full plate with a radius of 1.2 m. Young’s modulus is 200
The boundaries of the sub-models must be handled with care. In the geometry for the electromagnetic sub-models, there is a layer of infinite elements at the air boundary simulating an air region extending to infinitely far away. In the geometry of the elastodynamic sub-model, the top and bottom boundaries of the full plate are free boundaries without constraints or loads. For a transient analysis, the outer end edge of the plate (at
To further increase the accuracy of the model, fillets are added to the sharp corners of the magnet and the wires, so that the singularities are removed, while at the same time the number of elements and hence the complexity of the model is also increased.
The amplitudes of the displacement components at the observation point will be used to calculate the objective function of optimization. So we must explore how to calculate the amplitudes.
The first approach is evaluating the amplitudes via the time-domain model. The bias magnetic field comes from the magnetostatic simulation. The eddy current distribution, and the generation and propagation of the Lamb waves are from the time-dependent simulations. An implicit time-stepping scheme (generalized-
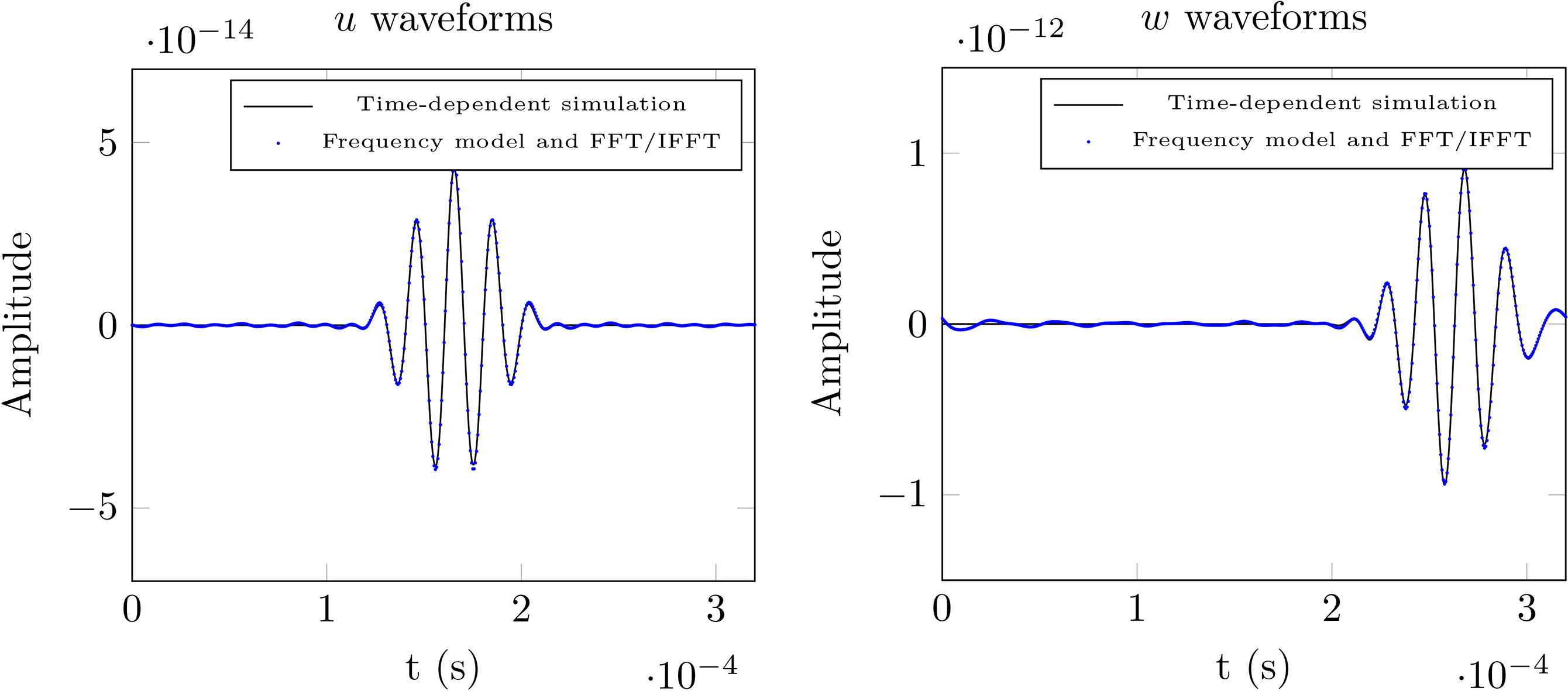
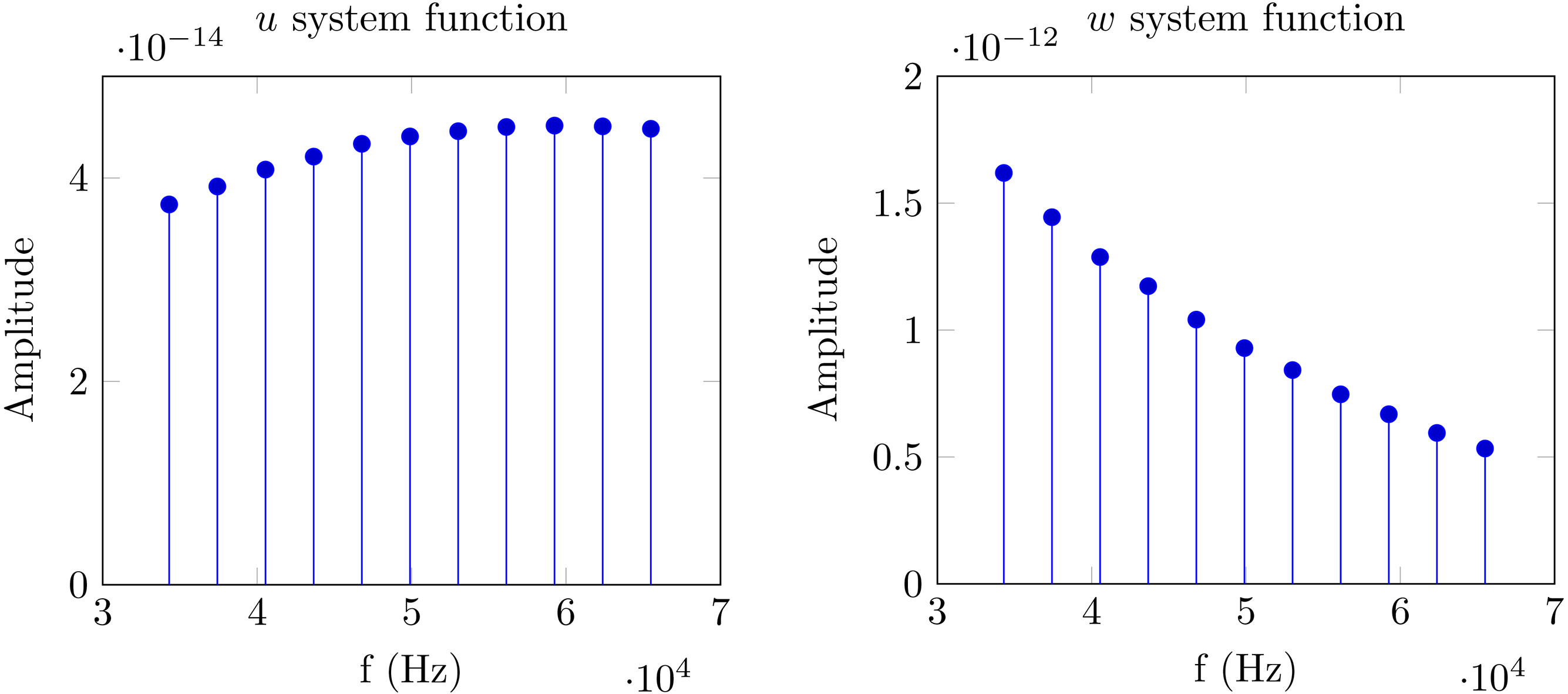
The second approach is to transform the input time-continuous excitation signal
in which
One important requisite to validate the frequency domain model is that the whole model must be linear. With the frequency domain model we cannot handle the dynamic part of the Lorentz force easily, because two complex phasors cannot be multiplied to obtain another phasor, so we have to specify a small value of the input current so that the Lorentz force component from the dynamic magnetic field could be ignored.
Since we are mostly concerned with the amplitudes of the
in which
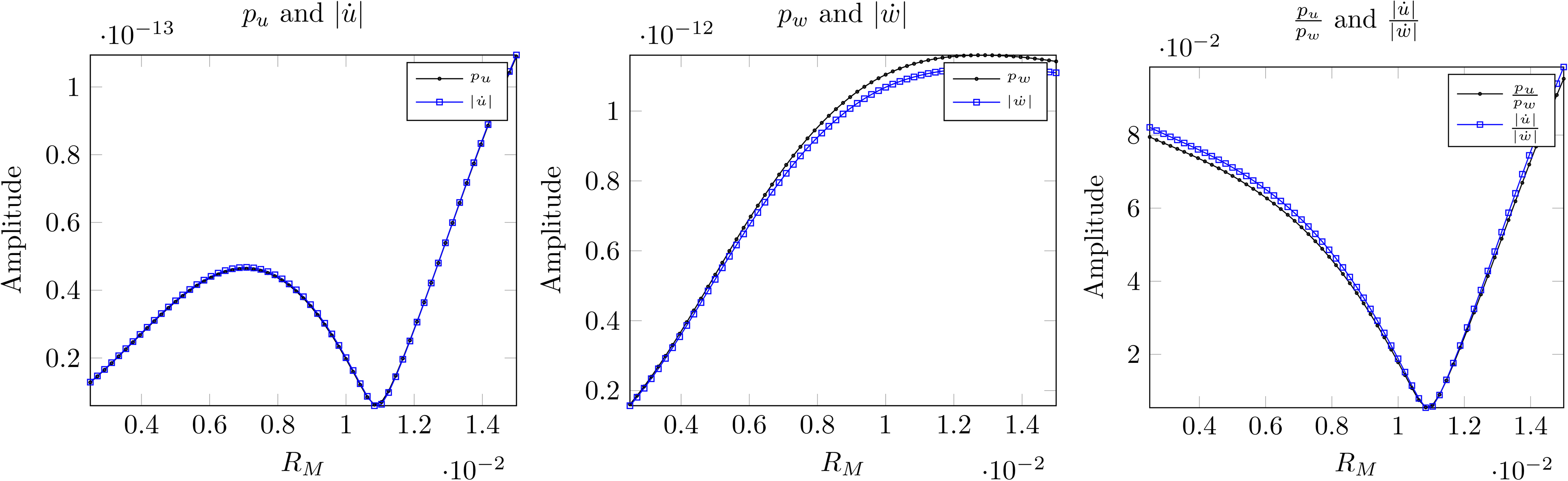
We have to further prove that the amplitudes from the single frequency approach (Approach 3) are acceptable approximations of those from the multifrequency approach (Approach 2). From Eq. (43), we can see that
The amplitudes of
The third approach is the fastest, since only one frequency is used.
In the previous sections, we reviewed the DACE model as an implementation of the Kriging surrogate model for deterministic computer experiments, built an omnidirectional EMAT model, discussed the possible approaches to compute the amplitudes of the displacement components. Next, we can apply the DACE model to predict the objective function, as a preparation for the optimizations.
Firstly, to test the performance of the prediction, we use the single frequency approach to calculate the amplitudes, because it’s the least time-consuming. We solved the objective function (
Next, we generate different number of known input/output data pairs according to Latin Hypercube Sampling [15], build the DACE model with these known data, and predict the objective function using the DACE model on a 60
Contour plots of the predicted objective function, single frequency model, on a 60 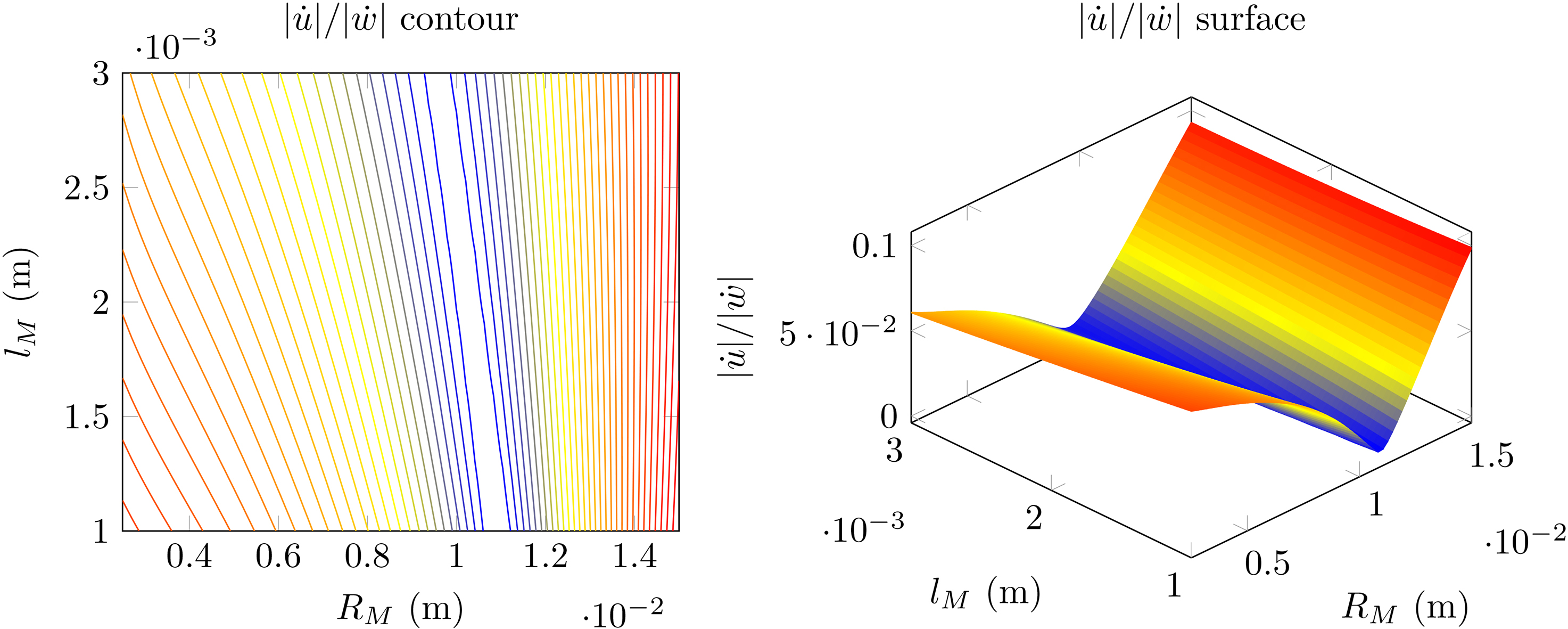
Contour plots of the predicted objective function, multi-frequency model, on a 60 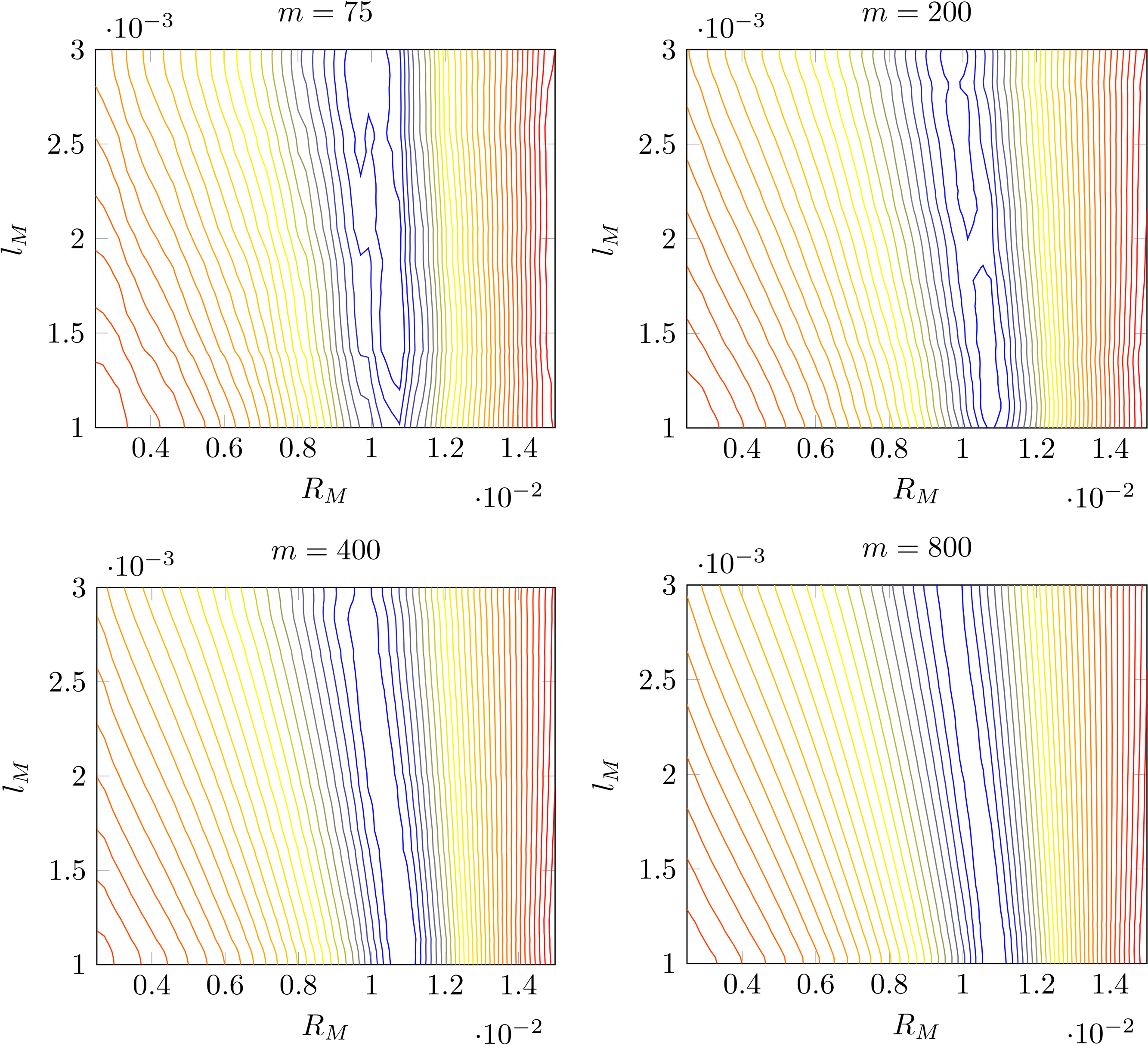
Contour plots of the predicted objective function, multi-frequency model, on a 60 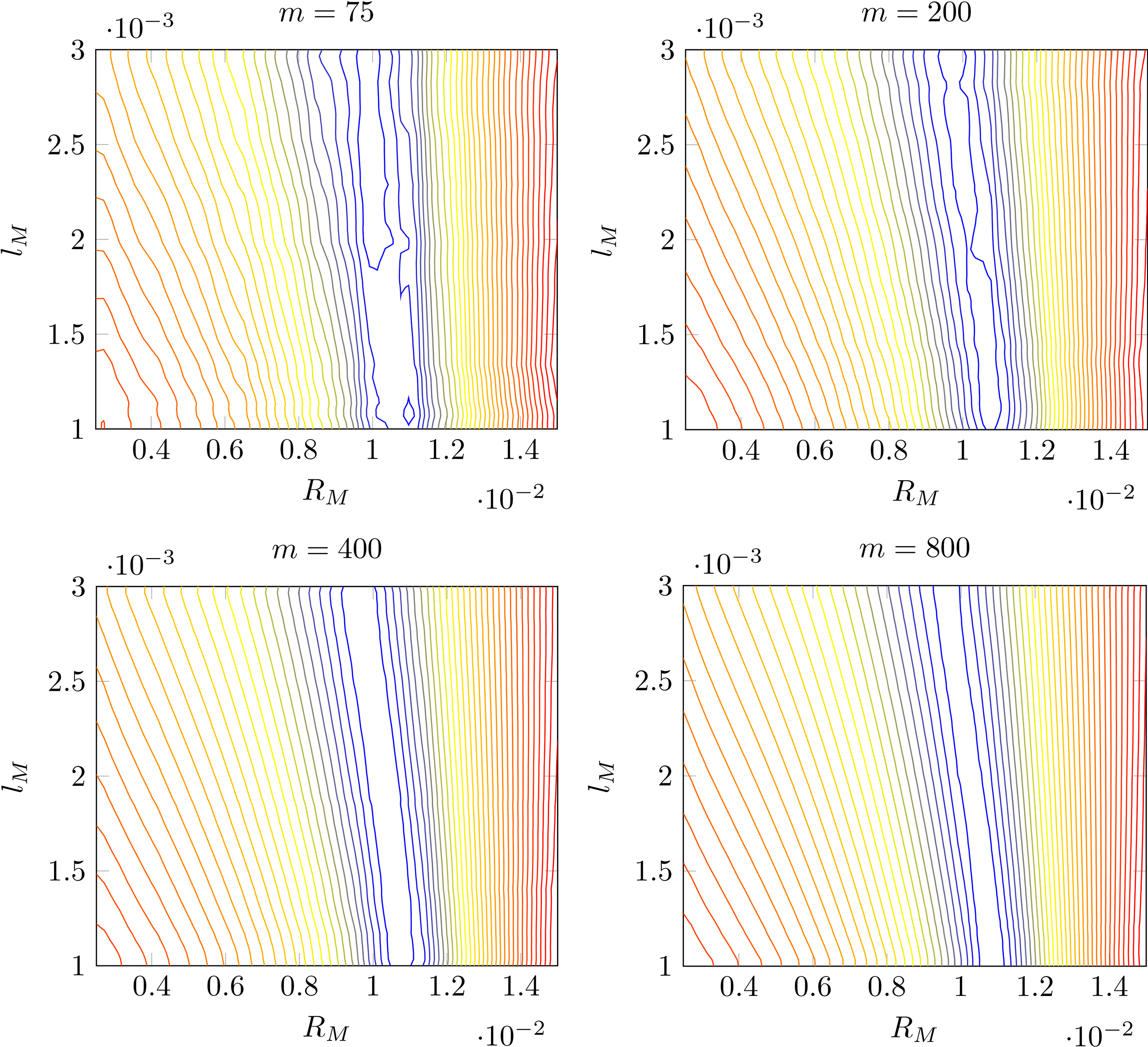
Then we explore prediction with the multifrequency model (Approach 2, frequency-domain model with FFT/IFFT processing). This method is more time-consuming, so we only build the DACE model and ignore the true model data like in the contour and surface plots in Fig. 5 which require 3600 evaluations of the objective function. The results are shown in Fig. 7, with different values of
MSE for prediction, multi-frequency model, 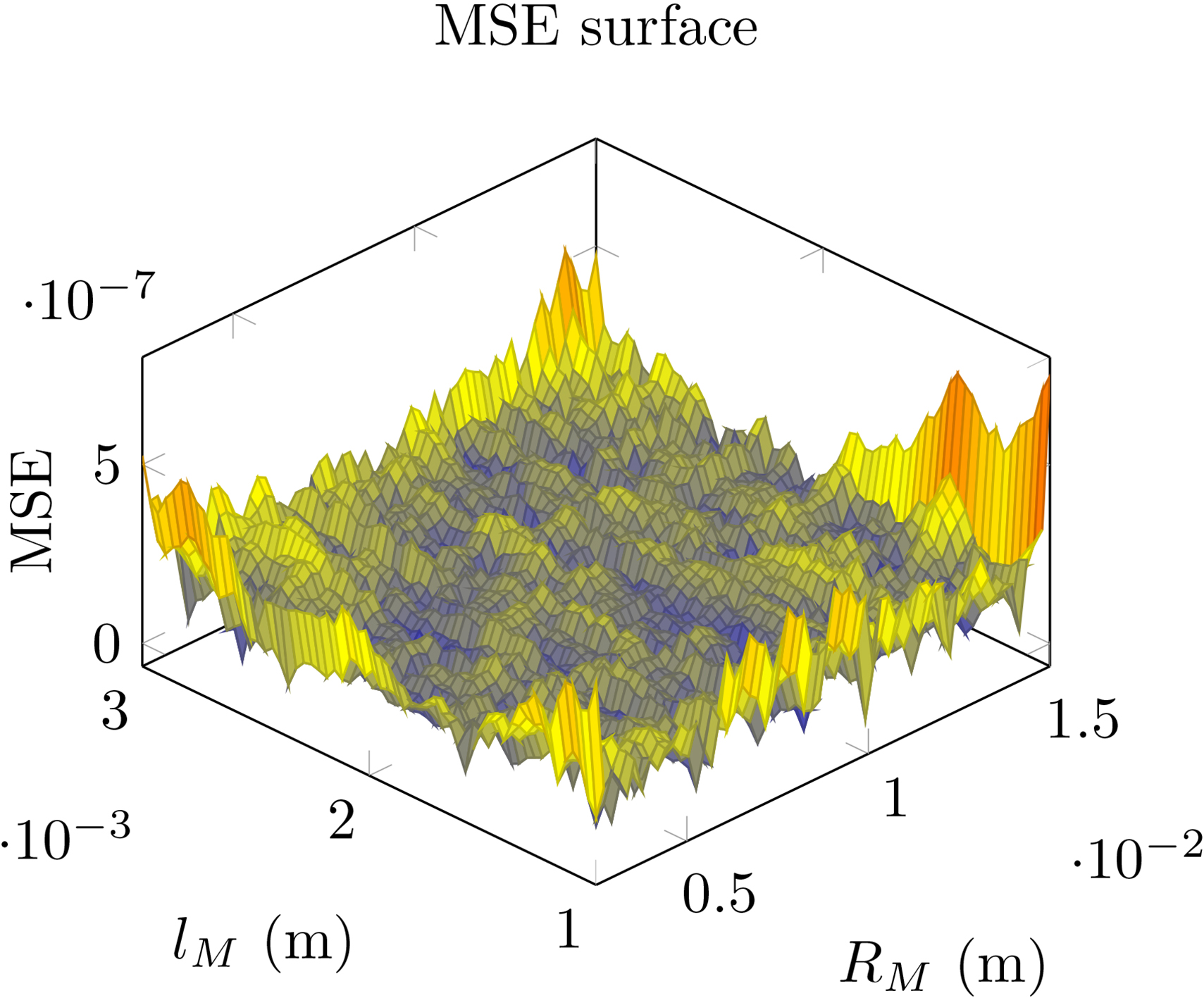
With the DACE Kriging model, we can also evaluate the MSE directly. The MSE for prediction using the multi-frequency model with
Finally we consider the problem of optimization of the EMAT. Formally, the problem is stated as,
in which
In this section, we apply the surrogate model obtained in the previous section for optimization of the omni-directional EMAT. The specific optimization algorithm selected is simulated annealing (SA) [21]. The idea of SA came from the process of cooling molten materials to solid state, where the system tends to reach the minimum energy state. The energy of a particle jumps randomly, as governed by the temperature of the system composed of many particles. The probability
in which
We developed a SA program in Matlab for optimization of the EMAT with the Kriging surrogate model (the DACE model), applying the multifrequency model (Approach 2). The initial temperature is 1, Boltzmann’s constant is
We run the SA programs multiple times. The reason is that the SA algorithm is stochastic so generally with every run the obtained result is slightly different. While for 5 runs of the program solving our EMAT optimization problem, we always get the same results. The minimum of the objective function is 0.0057, the design variables are
Finally we can summarize the strategy to optimize an EMAT, possibly with a surrogate model,
The time domain model is too time-consuming. One run of the model normally takes several hours. Even with the surrogate model, the time to generate enough known data pairs is too much, so generally we do not want to use it in optimizations. The multifrequency method is much faster. Without a proper surrogate model, the total time of optimization will be too long. With the surrogate model, although some time is needed to generate the known data, the total time is greatly decreased and acceptable. One requisite is that the model must be linear or a frequency model cannot be applied. The single frequency method, using the phasors diretly, is the fastest. Even without a surrogate model, the total time of optimization is not too long and acceptable. The downside is that the solved amplitudes of the displacement components are approxmations of the peaks of the envelopes of the time waveforms solved in the other two methods.
In this paper we introduced the Kriging surrogate model, used as a substitute for the black box function of an omnidirectional EMAT, in the optimization of this EMAT. The specific implementation of the Kriging surrogate model adopted is the DACE, suitable to model the deterministic output of a computer experiment.
Firstly the formulations of the DACE were reviewed, in which the output is modeled as sum of a regression part and a deviation part. Both the deviation and the total output are treated as random processes. The essential idea behind DACE is that the real response is one realisation of the output random process, and correlation between two samples of the deviation random process decreases with increasing distance between the two samples.
Then the formulations of an omnidirectional EMAT working on the Lorentz force mechanism were summarized. The underlying integro-differential equations describing the eddy current phenomenon were solved with a mid-level method proposed previously by the authors, with the benefit that the physics could be controlled completely. After this, the specifications of the model of the omnidirectional EMAT for generation of Lamb waves on a linearised steel plate were introduced. The axisymmetric model was divided into 2 geometries and 3 sub-models. Radial and axial displacement components, corresponding to the S0 mode and the A0 mode Lamb waves respectively, of an observation point at the middle plane of the plate were recorded to solve the objective function, defined as the ratio of the amplitude of the S0 mode to that of the A0 mode.
Next three different approaches to calculate the amplitudes of the displacement components were discussed. The first one is solving the peaks of the envelopes of the time waveforms from time-domain simulation, which involves small time steps and is very time-consuming. The second one is transforming the input excitation signal into its spectrum and feeding the spectrum to the frequency model, then transforming the modified spectrum back to the time domain and solving the peaks of the envelopes of the time waveforms. The third one is using the magnitudes of the phasors of the displacement components directly, i.e. using a single frequency in the frequency model. The waveforms from the first and second approaches were compared. The reason why the third approach could be applied as an approximation when evaluating the amplitudes was also explained.
Then different numbers (
Finally the obtained DACE model of the EMAT with the multifrequency approach was applied for optimization of the EMAT. As already discussed, the objective function to minimize is the ratio of the amplitude of the S0 mode to that of the A0 mode, i.e. preferably generating the A0 mode Lamb waves. The chosen global optimization algorithm was the simulated annealing. The program was run 5 times and always gave the same results. The design variables at the optimal point were compared with previous work to validate the Kriging surrogate model (DACE). With the surrogate model, the total time of the optimization was decreased greatly, while at the same time, the accuracy of optimization was acceptable.
Footnotes
This crucial step of force transfer is implemented with Extrusion coupling operator in COMSOL, which could be used to map an expression from a source to a destination.
Acknowledgments
This work was financially supported by the National Natural Science Foundation of China (grant No. 51677093 and 51777100), National Key Scientific Instrument and Equipment Development Project (grant No. 2013YQ140505), and China Scholarship Council (grant No. 201506215055).