
Abstract
Aimed at enhancing the control precision and speed tracking rapidity of a permanent magnet linear synchronous motor (PMLSM), a novel control scheme combining the inverse system method and the internal model control is proposed in this paper. A decoupling pseudo-linear system can be obtained by cascading the inverse model of the PMLSM with the original system. In addition, in order to improve the robustness of the whole system and to reject the influence of the unmodeled dynamics and various disturbances to the linearizing control accuracy, the internal model controller is used as the extra closed-loop controller for the pseudo-linear system. Therefore, the presented control scheme incorporates the advantages of both the inverse system method and the internal model control. The effectiveness of the proposed control scheme is verified by simulation and experimental results at various operations. Simulation studies are performed to prove the effectiveness of the proposed control scheme.
Keywords
Introduction
As demand increases for the fast and precise linear motion in the automatic control systems, the linear motor-driven motion systems have received significant attention for high-speed/high-accuracy motion control in renewable energy devices, transportation, automation of manufacturing processes, and pumping applications [1]. Compared with traditional rotary motors with ball screws and reduction gears [2], linear motors can directly produce thrust to loads without the mechanical transmission [3]. Among various kinds of linear motors, permanent magnet linear synchronous motors (PMLSMs) have some main merits of high speed and high precision in long-distance locations, high thrust force density, higher reliability, low thermal losses and low noise, and rapid dynamic response, and hence, PMLSMs are being actively researched and developed around the world [4, 5]. Thus, the increasing applications of the PMLSMs imply the vital importance of developing robust, simple, and fast control methods for PMLSMs to suit the primary requirements of these emerging industrial applications and are of prime concern.
The traditional proportional-integral-differential (PID) control scheme has been already widely applied in the PMLSMs. However, the PMLSM is a multivariable, nonlinear, and strongly coupling system with the parameter variations as well as unavoidable disturbances. Thus, it is very difficult for the PID control scheme to obtain a sufficiently high performance for this kind of nonlinear plants. In the past decades, with the rapid development of modern control theories [6, 7, 8] and motor control techniques, considerable works have been devoted to presenting a variety of nonlinear control schemes for PMLSMs, such as direct thrust force control [9, 10], adaptive disturbance compensation control [11], predictive control [12], backstepping control [13], fuzzy control [14, 15], sliding mode control [16, 17], etc. These nonlinear control schemes improve the control performance of BM systems in different aspects.
In addition to the aforementioned nonlinear control schemes, many researchers have concentrated on the decoupling and linearizing control approaches for PMLSMs and other linear motor drive systems in recent year. Generally, decoupling and linearizing control approaches mainly including intelligence-based approaches [18, 19, 20] as well as analytical-based decoupling and linearizing control approaches [21, 22]. The intelligent-based decoupling and linearizing control schemes are acceptable for the controlled plants where precise mathematical models are easy to obtain. Nevertheless, a large amount of data and large allocations of computer resources are needed that are often typically restricted in the PMLSM control system. Decoupling and linearizing control schemes mainly can be divided into the differential geometry approach and inverse system method [23, 24]. Compared with the differential geometry method, the inverse system method is relatively simple to implement in practical applications. Thus, the inverse system method is employed for the PMLSM in this paper.
However, the inverse system method may adversely influence the tracking, disturbance rejection and robustness properties because of the uncertainties, unmodeled dynamics, and parameters variation. In addition, the actual controlled plant of the PMLSM system is not dynamically equivalent to its ideal mathematical model since the model is obtained without consideration about the system noises, bandwidth of the amplifiers, computation delay, etc. Thus, to overcome the disadvantages, the internal model control theory is used to design the extra controllers to improve the robustness of the whole PMLSM system [25, 26, 27].
One objective of this paper is to show that the nonlinear PMLSM system with multiple coupled states and parameter variations can be successfully linearized by the inverse system method. The other objective of this paper is to demonstrate that the issues of control accuracy caused by the uncertainties, unmodeled dynamics, and parameters variation can be effectively resolved by employing the internal model controllers.
The paper is arranged in the following manner. In Section 2, the inverse system scheme is employed for linearizing control of the PMLSM system. And then, the internal model control theory is adopted to design the robust closed-loop controller in Section 3. After that, simulation researches are carried out to verify the effectiveness of the proposed control scheme in Section 4. Finally, Section 5 concludes the paper.
Inverse system modeling
Dynamic model of the PMLSM
The adopted PMLSM comprises a stationary long “secondary” which includes neodymium-iron-boron (NdFeB) PMs with guidance rail and linear scale, and a moving short “primary” which includes the core armature windings and Hall sensing elements. The electromagnetic thrust force of the PMLSM is generated by the coupling function of PM magnetic field and the magnetic field produced by the armature windings fed by a current-controlled pulse width modulation (PWM) voltage source inverter (VSI). Neglecting flux distortions, the voltage equations of the PMLSM can be given as
with
where
The electromagnetic thrust force equation can be given by
where
where
Therefore, a 3-order nonlinear model of the dynamic equation of the PMLSM can be given as the following explicit form:
Based on the field-oriented control method with
From Eq. (6), it can be seen that the dynamic model of the PMLSM is nonlinear.
State variables are chosen as
Input variable is chosen as
Output variable is chosen as
Substituting Eqs (7)–(9) into Eq. (6), we can get the 2-order state equation of the PMLSM drive system as
Based on the inverse system theory and Interactor algorithm, the outputs of the PMLSM drive system are differentiated until the derivatives contain input variable
Then, the Jacobin matrix can be achieved as:
The relative orders of the system is
In this part, the analytic solution of the inversion of the PMLSM drive system will be resolved. According to the theory of the inverse system, the new input variable is defined:
where
By combining the inversion of the PMLSM drive system with the original system, a new pseudo-linear system consisting can be obtained, as shown in Fig. 1.
Diagram of pseudolinear system.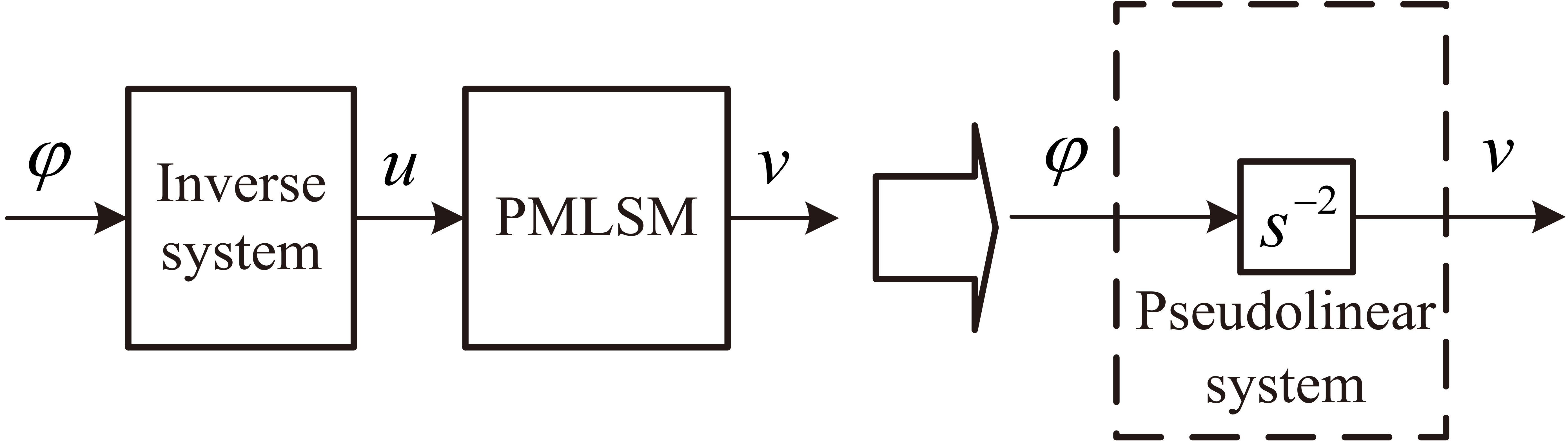
2-DOF internal model controller
The design and analysis of a 2-DOF internal model controller for the linearized PMLSM is developed in this section. The internal model control technique relies on the “internal model” principle including a model of the plant to be controlled in the control structure. In addition, a 2-DOF internal model controller includes two internal model controllers, i.e., a set point controller
From Fig. 1, the pseudo-linear system can be given as
The transfer function Eq. (16) is the nominal model of the primary linear speed
where
The schematic representation of the 2-DOF internal model controller for the pseudo-linear system of the primary linear speed
The 2-DOF internal model controller structure.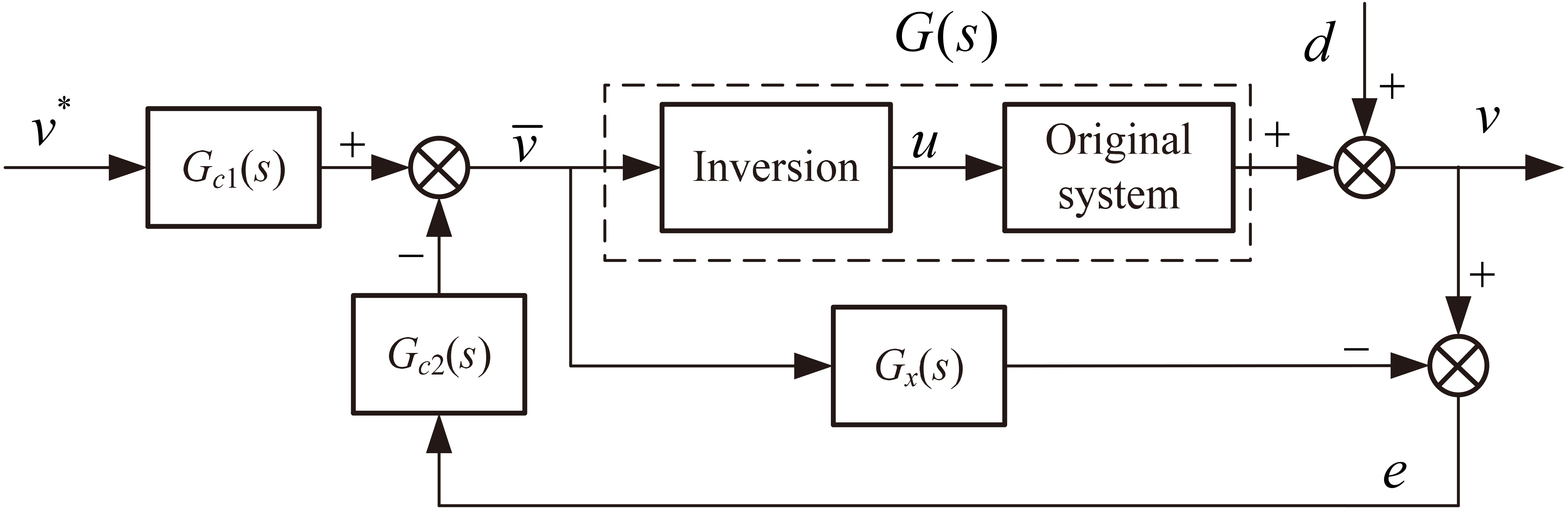
According to Fig. 2, the output can be calculated as
If
From Eq. (19), it can be seen that the tracking characteristic only relies on
The low-pass filters
where
Therefore, Fig. 2 is equivalent to Fig. 3,
The closed-loop system of the 2-DOF internal model controller.
From Fig. 3, the output error transfer function of the closed-loop system can be defined as
According to the tracking performance, letting
Assuming
From Eq. (25), it is obvious that
Let
Assuming
From Eq. (27), it is obvious that the output error equation
Based on the analysis of system performance indexes and robust stability, it can be realized that the effective independent control of tracking and robustness performance by choosing optimal control parameter sets
Parameters of the proposed method
Parameters of the traditional PID method
Control block diagram of the PMLSM drive system.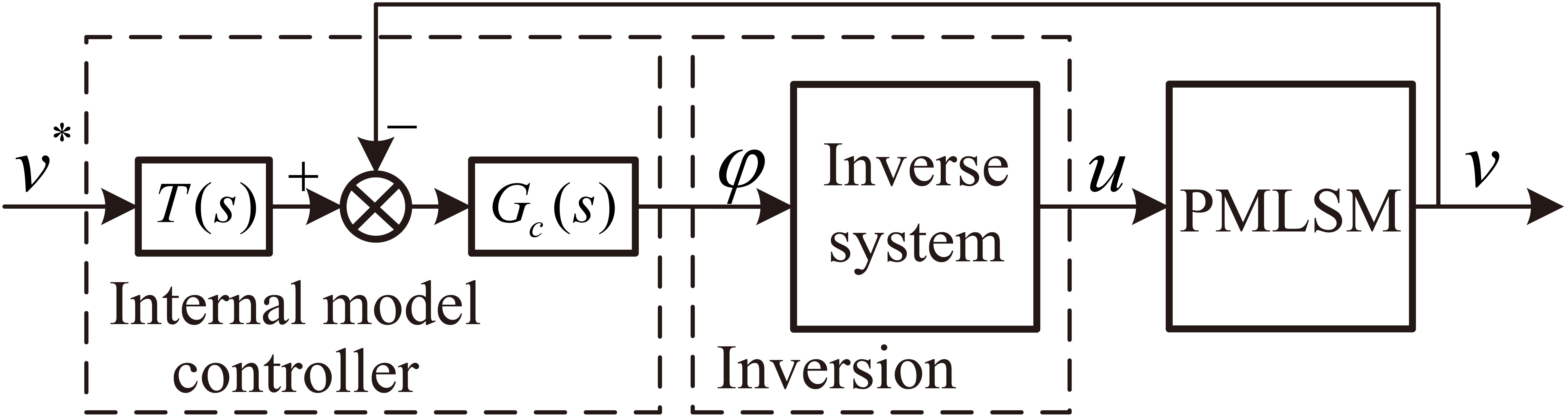
The control block diagram and the design flow chart of the entire PMLSM drive system using the proposed control scheme are shown in Figs 4 and 5, respectively. The parameters of the PMLSM drive system are as follows. The average electromagnetic thrust force is 275 N. The mass of the primary inertia is 3.2 kg. The viscous friction factor is 8 N
Flow chart of the control system.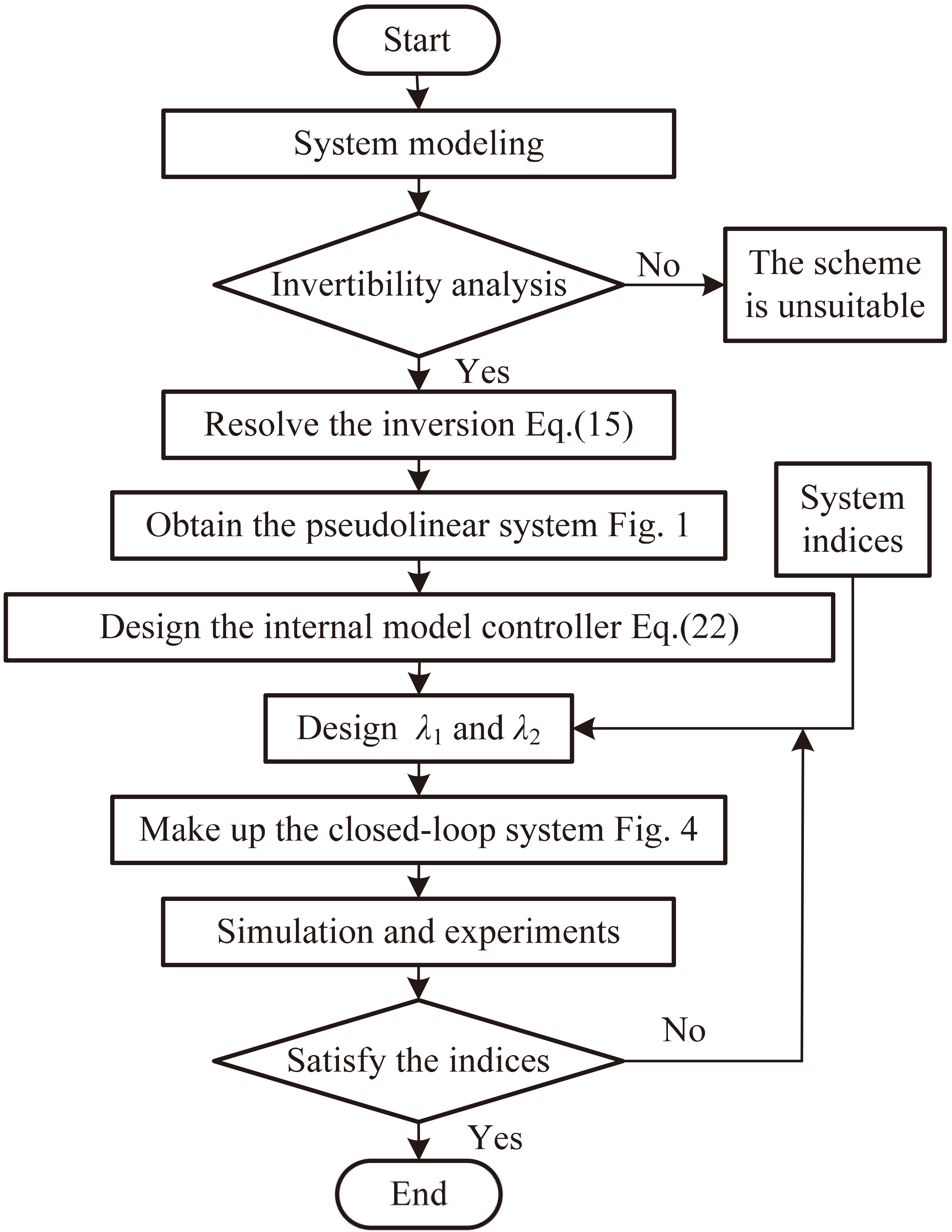
Comparative simulation studies between the inverse system plus internal model control and the traditional PID control method have been performed to evaluate the effectiveness of the proposed control scheme for the BPMSM system. Some simulation and comparison results are presented here.
In order to test the tracking, robustness, and disturbance rejection performances of the PMLSM drive system, the system is subjected to the reference speed step, parameter variation and external disturbance, respectively. At
Tracking, robustness, and disturbance rejection properties of the PID control scheme. (a) 
Tracking, robustness, and disturbance rejection properties of the proposed control scheme. (a) 
According to Fig. 6a and b, as for the traditional PID control method, when
On the contrary, from Fig. 7a–c, in regard to the proposed inverse system scheme plus internal model controller, the setting time and the overshoot of the speed all decrease when the values of
To achieve the high-performance control of the PMLSM drive system, this paper presents a linearizing control scheme consisting of inverse system plus an internal model controller. The simulation results demonstrate that, by using the proposed control scheme, linearizing control of the PMLSM drive system can be realized successfully, which can effectively avoid the disadvantages of the traditional PID scheme. In addition, by employing the 2-DOF internal model controller as the closed-loop controller for the pseudo-linear system, the control accuracy can be improved effectively, and the influence of the unmodeled dynamics can be eliminated as well. Moreover, we can adjust the control performances of the tracking, robustness, and disturbance rejection at the same time by regulating the values of control parameters
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China under Projects 51305170, 51475213, and 51475214, the Natural Science Foundation of Jiangsu Province of China under Projects BK20170071 and BK20141301, the China Postdoctoral Science Foundation under Projects 2016M601726 and 2015T80508, the Six Categories Talent Peak of Jiangsu Province under Projects 2015-XNYQC-003, 2014-ZBZZ-017, and 2016-GDZB-096, the Postgraduate Research & Practice Innovation Program of Jiangsu Province under Project KYCX17_1815, the Key Project of Natural Science Foundation of Jiangsu Higher Education Institutions under Project 17KJA460005, the “333 project” of Jiangsu Province under Project BRA2017441, Zhenjiang Key Research and Development Project under Project GY2016003, and the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD).