
Abstract
In this paper, magnetic force and vibration in low-speed surface-mounted permanent magnet (PM) machines accounting for eccentric and concentric magnet poles are investigated. It is shown that the number of harmonics and total harmonic distortion (THD) of radial flux density and radial force density, cogging torque, and displacement of stator core in concentric PM machine are much bigger than those in eccentric PM machine. The eccentric magnetic pole is helpful to reduce vibration and acoustic noise. And the ratio of the mean square error of the radial force on the teeth of the two prototype machines are approximately equal to the ratio of the peak-peak value of the displacement at the outer periphery of the stator core of the two prototype machines.
Introduction
Compared to traditional PM machines, the low-speed PM machines with fractional slot and concentrated windings have several advantages, such as shorter end windings, higher slot fill factor, lower cogging torque, higher torque and power density, better flux-weakening capability and lower cost module level manufacturing [1, 2, 3, 4, 5, 6]. It has been an attractive alternative in a variety of low-speed applications, such as wind generators, elevator, electric vehicle, and marine propulsion. In order to reduce the diameter and size of machine, these type of machines have a large number of poles and similar number of slots. Therefore, the stator yoke is thinner than that in conventional PM machines. This may increase vibration and acoustic noise because of thinner stator yoke. Life span of mechanical equipment, hiding performance of submarine and working environment have been effected seriously by vibration and acoustic noise of electrical machine all the time. Magnetically induced vibration and acoustic noise is one of the most important parts [7]. Therefore it is very important to study vibration and acoustic noise of low-speed PM machine.
Based on magnetic and structural analysis, vibration and acoustic noise in low-speed surface-mounted PM machines have been a popular subject of considerable research recently. In [8], the general expression of the frequency and corresponding mode number of radial force harmonics is given for PM machines. The harmonics of radial force with low mode number can induce high mechanical vibration for fractional-slot PM machines. In [9], an analytical model has been developed to determine radial deformation using radial pressure as the input. In [10], electromagnetic vibration-and-noise sources in PM machines with commutator are studied. The electromagnetic sources are considered as an electro-magnetic field distributed in the air-gap region of motors. In [9, 11, 12], it has been pointed out that the modular machine is prone to exhibit higher levels of vibration than the conventional nonmodular machines due to the presence of low-order modes.
There are many factors to influence vibration and acoustic noise. In [13, 14], the effect of pole and slot combination on vibration and acoustic noise characteristics has been studied in low-speed PM machines. In [15, 16], the effect of slot harmonic on radial magnetic forces was investigated in low-speed PM machines with concentrated windings. The magnitude of the lowest mode of vibration can be reduced while using semi-closed slots or magnetic wedges. The amplitude of the lowest spatial harmonic of the radial force distribution will be changed significantly with the change of d-axis current.
There are also many methods to reduce vibration and acoustic noise. In [17], step skewed rotor is applied to the design to reduce magnetically induced force in order to reduce vibration and acoustic noise. Displacement of stator core caused by magnetic force is studied to explain the mechanism of reduction of vibration and acoustic noise by skewed rotor. In [18], the spatial distribution and frequency characteristics of the external rotor PM machines accounting for slot-pole combinations have been investigated. At the same time, slot opening width is optimized to reduce the amplitude of magnetic force accounting for resonance frequencies. In [19], it is found that the motors with a mode order greater than or equal to 3 are quite suitable to promote noise performance. In [20], a notch on the rotor pole face was considered to reduce mechanical vibration in the interior PM machine. The main exciting source of the magnetically induced vibration and acoustic noise is permanent magnet in PM machine. But the shape of permanent magnet is not referred in these papers.
In this paper, two modular prototype machines (30-poles/27-slots) with eccentric and concentric magnet pole are compared to investigate magnetic force and vibration in low-speed surface-mounted PM machines based on magnetic field. In Section 2, the detailed data about prototype machines is presented. The flux density in the air gap is calculated using analytical method and finite element method. Then cogging torque and radial force density are obtained based on the air-gap magnetic field and Maxwell Stress Theory. In Section 3, the displacement in the stator core is calculated by structural finite element (FE) analysis. The results show that the PM machine with eccentric magnet pole has advantage to reduce cogging torque, displacement, and harmonics content of radial flux density and radial force density.
Electromagnetic analysis
Flux density calculation
The low-speed surface-mounted PM machines with eccentric and concentric magnet poles are shown in Fig. 1. The eccentric magnet poles is described more clearly in [21]. The number of poles is similar with the number of slots in this type of low-speed PM machines. And the detailed data of the prototype low-speed surface-mounted PM machines with 30 poles and 27 slots are shown in Table 1. The minimum thickness of permanent magnet is 6 mm in the prototype machine with eccentric magnet poles. And it is 12 mm in the prototype machine with concentric magnet poles.
According to surface-current method of permanent magnet, subdomain model, method of separating variables and superposition principle of vector potential, magnetic field can be obtained analytically [21]. Figures 2 and 3 show the distributions of the radial and circumferential components of flux density in eccentric and concentric PM machine. As can be seen, the flux density with analytical method almost completely matches FE results. The flux density with analytical method can be well used in the following calculation and analysis.
Main parameters of two prototype machines (in millimeters)
Main parameters of two prototype machines (in millimeters)
Low-speed surface-mounted PM machines. (a) PM machine with eccentric magnet poles; (b) PM machine with concentric magnet poles.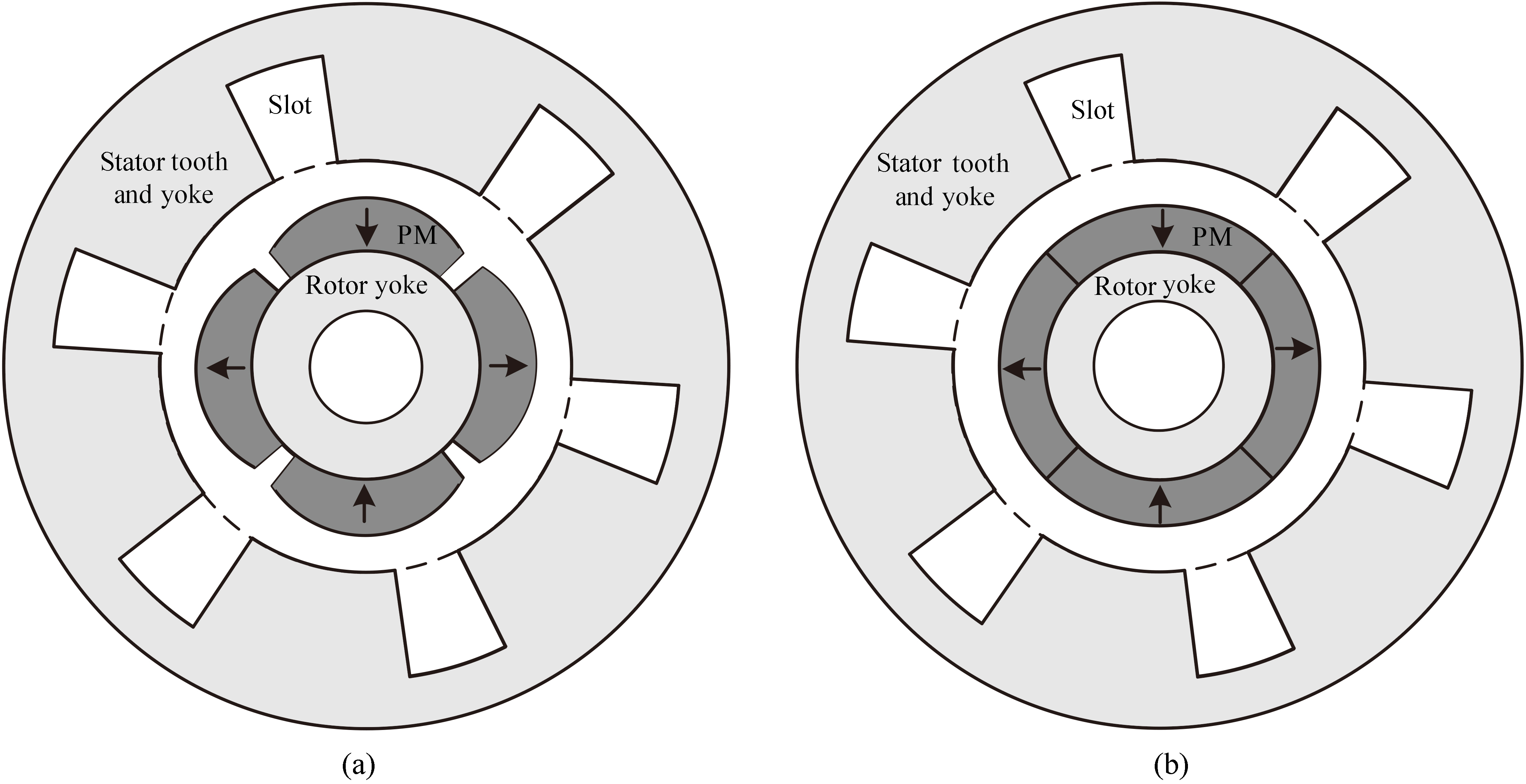
Flux density distribution in the air-gap at 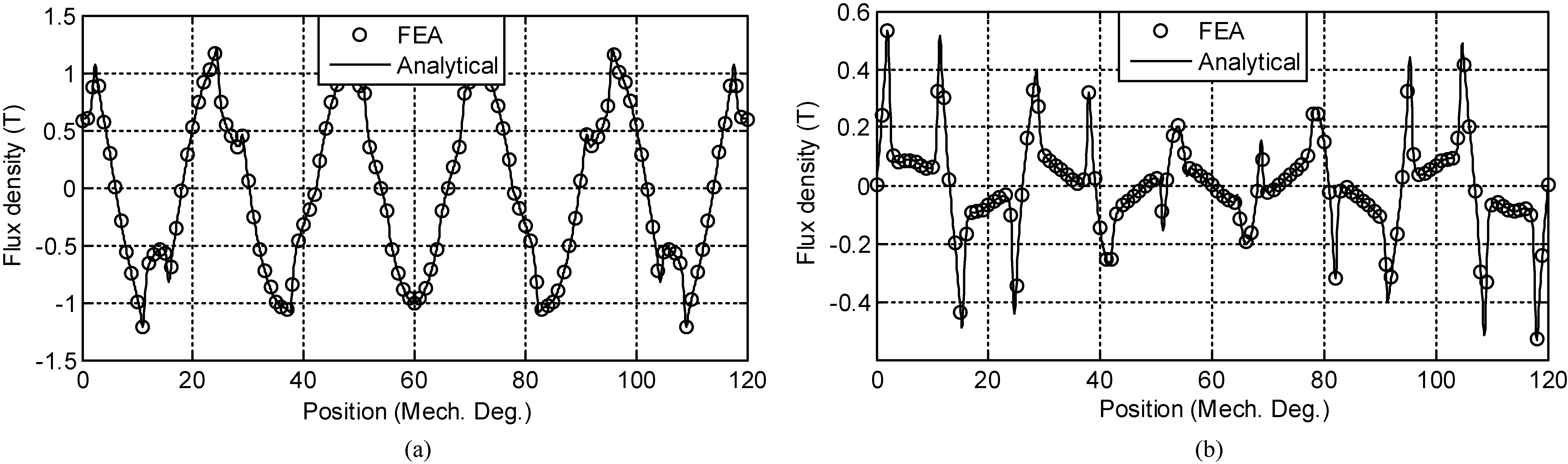
Flux density distribution in the air-gap at 
Spatial harmonics of radial flux density distribution in the air gap at 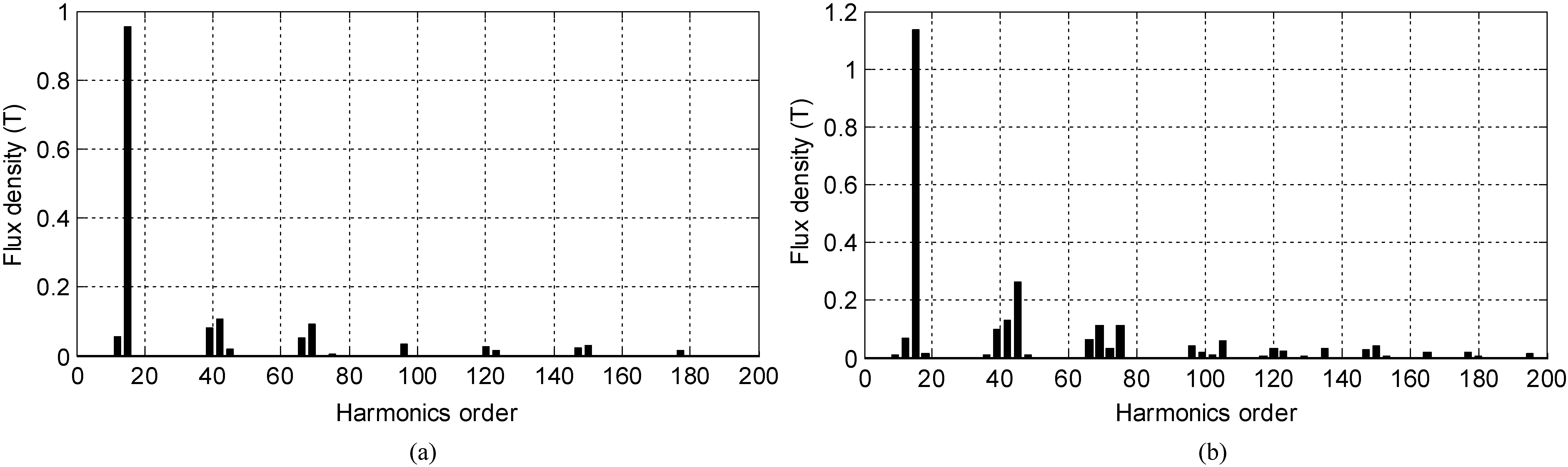
Spatial harmonics in radial air-gap flux density distribution of the prototype machines are shown in Fig. 4. The 15th harmonic is the strongest harmonic of the radial air-gap flux density of eccentric PM machine, the value of which is 0.9548 T. The order 12, 39, 42, 66, 69, etc. are the fractional harmonics of the 15th harmonic. The THD is 20.22%. Fractional harmonics are the result of the slots in this type of fractional machine. The value of 15th harmonic in concentric PM machine is 1.1377 T. The order 9, 12, 18, 36, 39, 42, 63, 66, 69, etc. are the fractional harmonics of the 15th harmonic. The THD is 33.36%. As can be seen, the value of 15th harmonic, the number of harmonics and THD of radial flux density in concentric PM machine are much bigger than those in eccentric PM machine.
According to Maxwell Stress Theory [21], the force per unit surface on the body placed in the elec-tromagnetic field can be calculated by
where
Cogging torque waveforms. (a) Eccentric PM machine; (b) Concentric PM machine.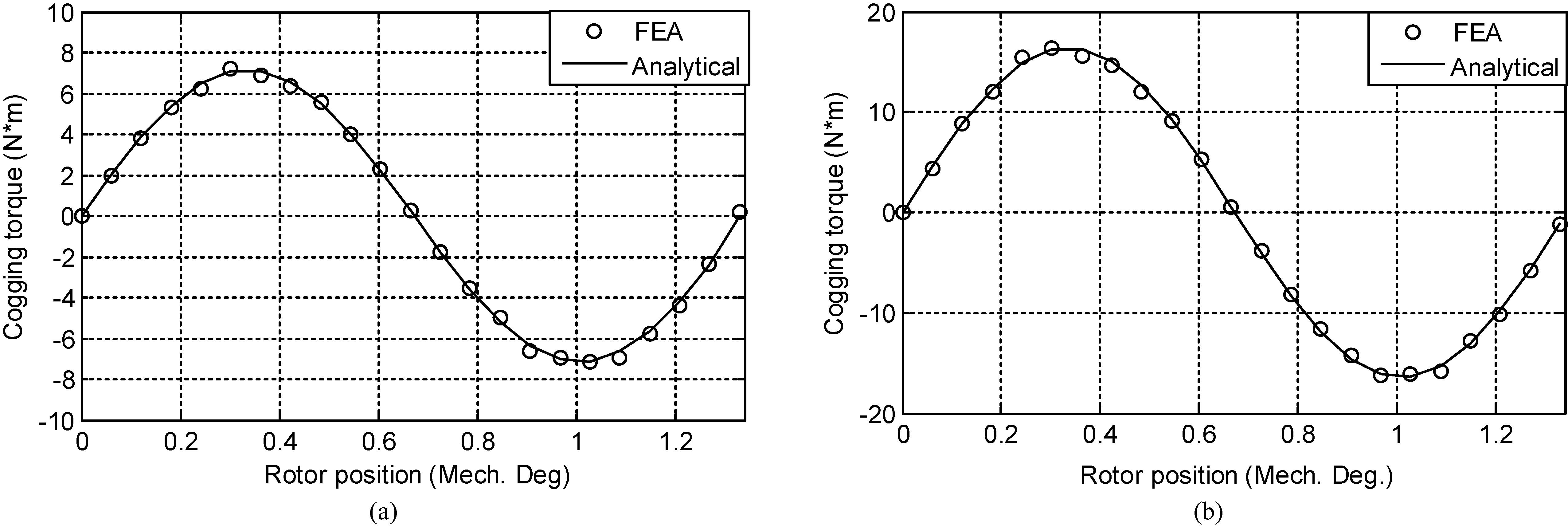
Radial force density distribution in the air-gap at 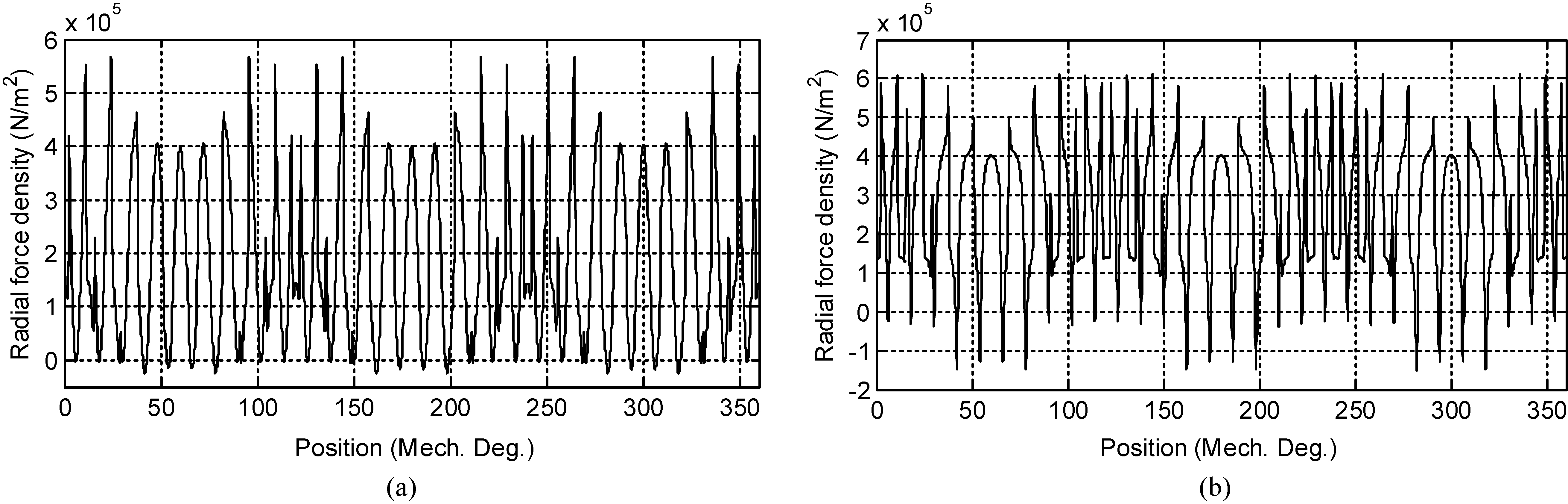
Radial force of teeth in eccentric PM machine (in newton)
Radial force of teeth in concentric PM machine (in newton)
Spatial harmonics of radial force density distribution at 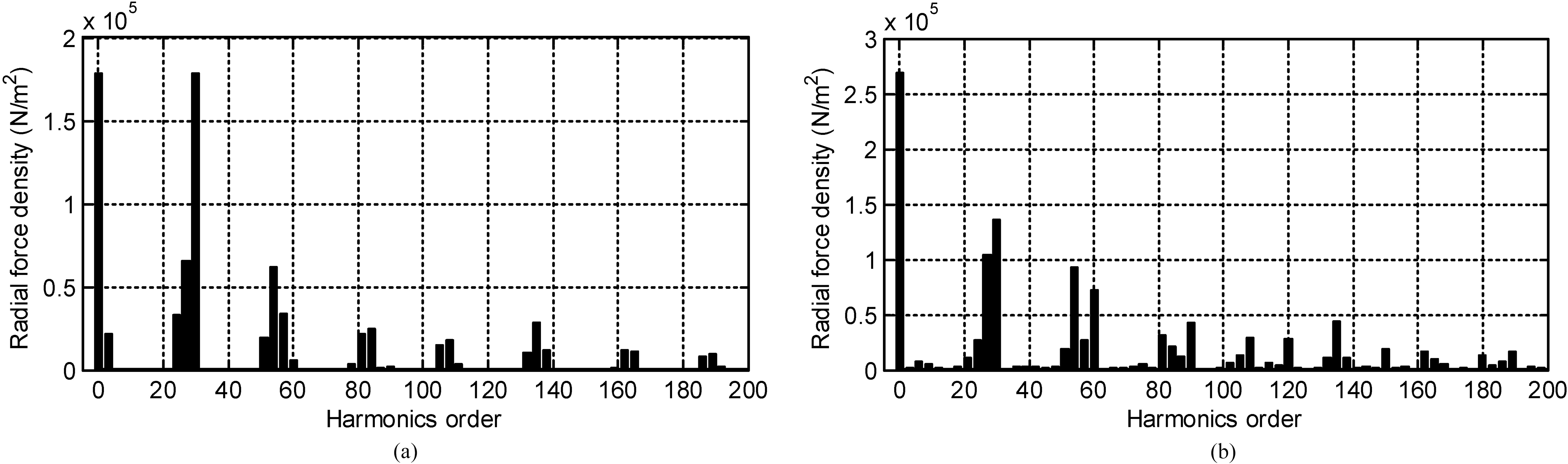
Nephogram of displacement in the stator core of eccentric PM machine in different time. (a) 
Displacement at the outer periphery of the stator core of eccentric PM machine in different time. (a) 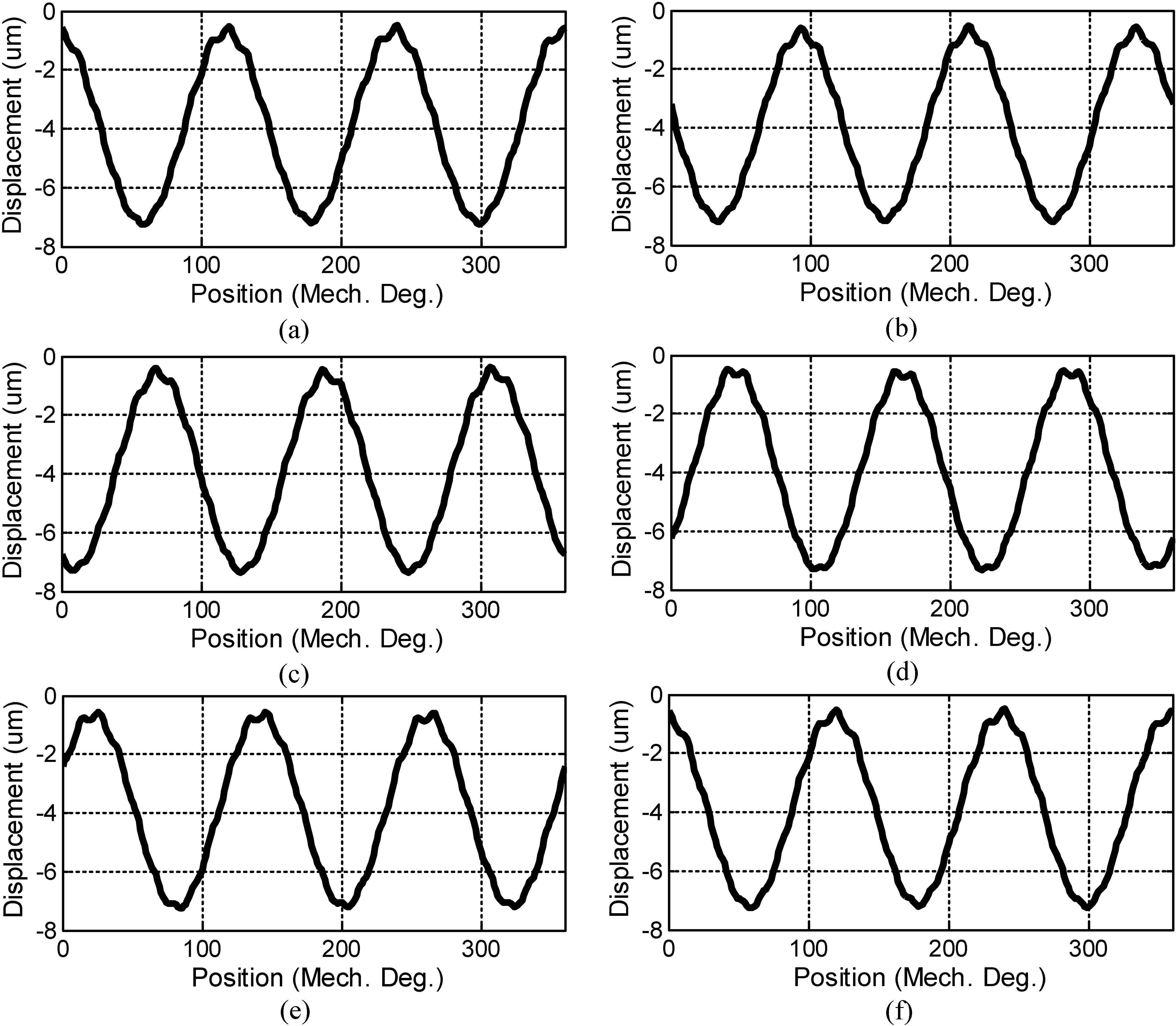
Nephogram of displacement in the stator core of concentric PM machine in different time. (a) 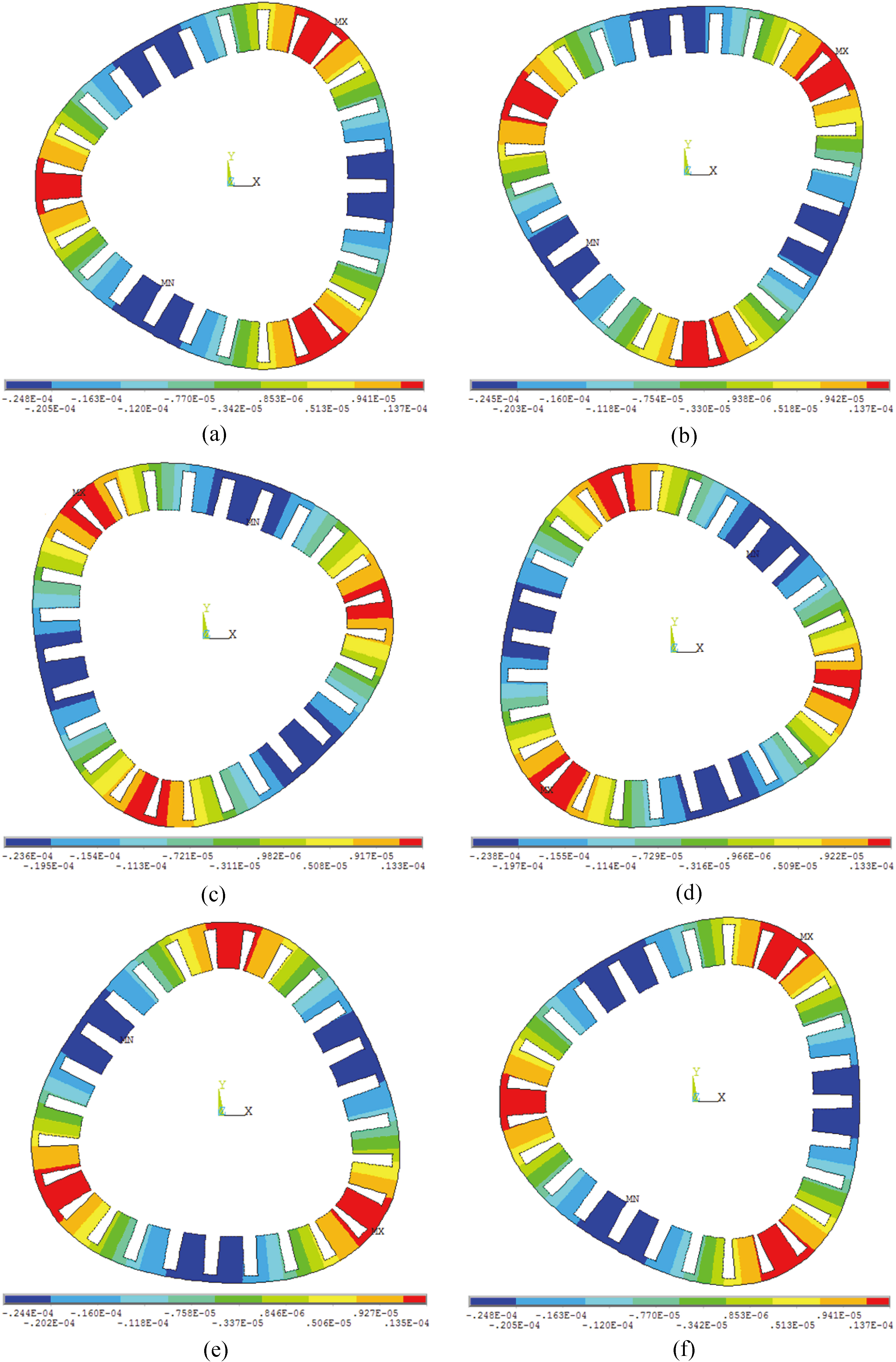
Displacement at the outer periphery of the stator core of concentric PM machine in different time. (a) 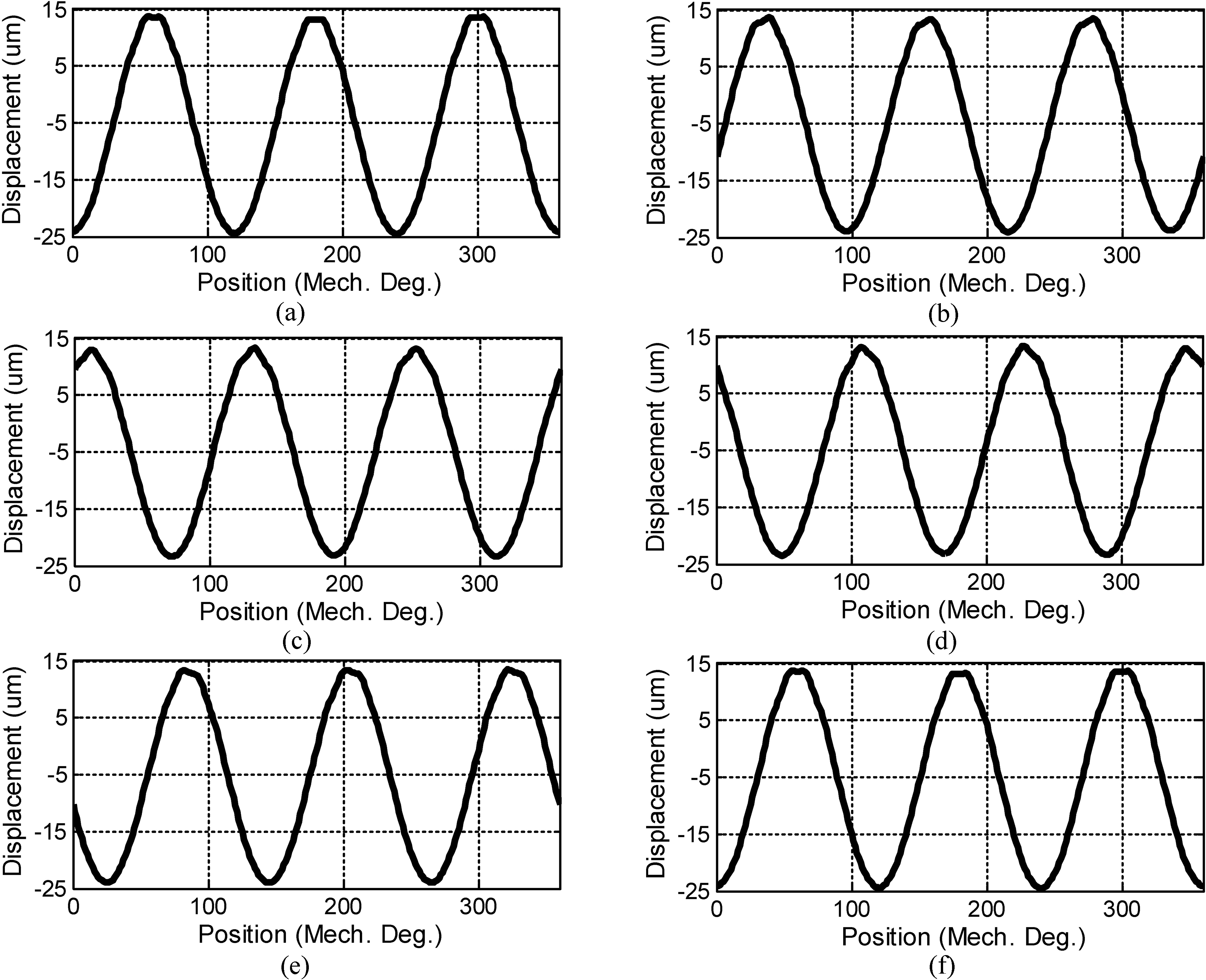
Figure 5 shows the cogging torque waveforms of the two prototype machines. Maximum value of cogging torque in eccentric PM machine is 7.1 Nm while that in concentric PM machine is 16.3 Nm. As can be seen, the cogging torque in eccentric PM machine is obviously smaller than that in concentric PM machine.
The magnetically induced vibration and acoustic noise is excited by magnetic field. And the main source is radial magnetic force. According to the second part of Eq. (1), the distribution of radial force density in the air gap can be obtained by
where
Figure 7 shows the spatial harmonics of radial force density. The DC component is excluded in the analysis. The radial force density in eccentric PM machine contains space harmonics of orders 3, 24, 27, 30, 51, 54, 57, 78, 81, 84 etc. in Fig. 7a, while the radial force density in eccentric PM machine nearly contains all spatial harmonics of 3
Radial force is delivered to stator yoke via tooth. The deformation of stator core caused by radial force will be changed periodically with the rotation of rotor. Then the energy of vibration and acoustic noise is excited and transferred to the outside of machine.
According to the distribution of radial force density, the total forces acting on stator teeth can be calculated by
where
According to Tables 2 and 3, the mean value of radial force on the teeth of eccentric and concentric PM machine are 8857 N and 12112 N respectively. The mean square error are 75 N and 442 N respectively. The ratio of the mean square error is 0.170.
Then the structural FE analysis is set up to get the displacement of stator core. Modulus of elasticity, Poisson’s ratio and mass density of stator core are 200 GPa, 0.26 and 7650 kg/m
Figures 9 and 11 are the displacement at the outer periphery of the stator core in different time. The peak-peak value in concentric PM machine is 6.8 um while that in concentric PM machine is 38.2 um. The ratio of peak-peak value is 0.178. Therefore the eccentric magnetic pole is helpful to reduce vibration and acoustic noise. The ratio of the mean square error of the radial force on the tooth of the two prototype machines is approximately equal to the ratio of the peak-peak value of the displacement at the outer periphery of the stator core of the two prototype machines.
Figures 6 and 7 show the results between analytical and FE predictions of flux density in the air-gap and sots of machine with eccentric magnet poles. Figures 8 and 9 show the results between analytical and FE predictions of flux density in the air-gap and slots of machine with concentric magnet poles. As can be seen, the predicted flux density by subdomain model with equivalent surface-current method almost completely matches FE results.
Harmonic analysis of radial component of flux density with five pair of magnet poles in the air-gap is shown in Fig. 10. Because five pair of magnet poles are one cycle to radial component of flux density in the air-gap. Then the 5th order spatial harmonic is fundamental harmonic. The same harmonic orders are 7th, 17th, 19th, 29th, 31th etc. because of the influence of slots. The main different harmonic orders between Eccentric magnet poles and concentric magnet poles are the 15th and 25th order spatial harmonic. The harmonic content of radial component of flux density is 10.59% in the motor with eccentric magnet poles. The harmonic content of radial component of flux density is 23.17% in the motor with concentric magnet poles.
In this paper, the magnetic force and vibration in low-speed surface-mounted PM machines with eccentric and concentric magnet poles are investigated. The flux density in the air gap is calculated using analytical method and finite element method. The flux density with analytical method almost completely matches FE results. Cogging torque and radial force density is obtained based on the air-gap magnetic field and Maxwell Stress Theory. And the displacement in the stator core is calculated by structural FE analysis based on the distribution of radial force density in the air gap.
The results of investigate show that the number of harmonics and THD of radial flux density and radial force density, cogging torque, and displacement of stator core in concentric PM machine are much bigger than those in eccentric PM machine. And the ratio of the mean square error of the radial force on the tooth of the two prototype machines is approximately equal to the ratio of the peak-peak value of the displacement at the outer periphery of the stator core of the two prototype machines. The eccentric magnetic pole is helpful to reduce vibration and acoustic noise.
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China under Contract 51507180.