
Abstract
This paper presents the cost reduction design of a brushless DC motor (BLDCM) considering twelve step control. The twelve step control can improve the output of the motor using the conventional six step control. Weight reduction can be effectively achieved by reducing rotor, stator and magnet through optimization of BLDCM using a response surface method (RSM). The BLDCM volume was decreased by about 45%, while satisfying basic performance requirements and improving efficiency. Original and optimized motors were built and tested. Experimental results are compared in terms of output power and efficiency.
Keywords
Introduction
In low cost drive system, a brushless DC motor (BLDCM) which is easier to drive, has less switching loss and can reduce the material cost of the system than a permanent magnet synchronous motor (PMSM) [1]. In order to reduce the material cost of the motor drive system, a sensorless control of BLDCM is required according to elimination of the position sensor control for grasping the rotor position. The sensorless control is based on the six step control because it is possible to detect a zero crossing point of back electromotive force (Back EMF) of BLDCM [2,3]. In order to improve the output torque of the BLDCM, twelve step control was proposed and can improve a torque constant of about 12.5% compared with six step control [4–6]. Therefore, the design of BLDCM considering the twelve step control by replacing six step drive system can reduce weight and improve performance.
In this paper, a 364 W BLDCM was designed considering the twelve step control and optimized using a response surface method (RSM). The output torque equation per rotor unit volume was used for the weight reduction design and the RSM was used for the optimization design of the motor performances. To demonstrate the validity of RSM, finite element method (FEM) analysis was utilized to calculate the performances such as the cogging torque, phase current, output torque and torque ripple. To demonstrate the validity of the optimized model, prototype motors were fabricated and tested.

Experimental comparison results of original model according to controls (a) six step control (b) twelve step control.
The specifications of original motor drive system are given in Table 1. It is a 24 slot 4 pole machine, motor specifications are rated speed 1850 rpm, rated torque 1.88 Nm using the six step sensorless control. Figure 1 shows the experimental performance curves of the original motor when driven by six step control and twelve step control. Compared with the six step control, for twelve step control, the efficiency of BLDCM at the rated speed increased by about 1.81% and the maximum output power increased by about 230 W. It is obvious that the twelve step control on the same motor is able to offer a lager torque constant than six step control. Therefore, the size and weight of the original motor can be reduced by considering the increased torque constant.
Specifications of original motor drive system
Specifications of original motor drive system
An average output torque of using the six step and twelve step controls can be expressed as follows [6]

Configuration of original BLDCM.
The model of original BLDCM is shown in Fig. 2. RSM which is widely used for motor optimal design is a collection of statistical techniques for designing experiments, building models, evaluating the effects of various factors and searching for the optimum conditions [9–11]. It is applied to determine an optimization structure of rotor in BLDCM.
Four design variables in this optimization process are chosen as shown Fig. 2: the pole arc ratio PA (initial value 0.75), the length of slot opening SO (initial value 2.2 mm), the pole offset PO (initial value 9 mm), and the magnet thickness MT (initial 4.5 mm). In the optimization procedure, PA and SO are chosen from 0.7 to 0.8 mm and from 1.7 to 2.3 mm, PO is constrained from 8 to 11 mm, and MT form 3 to 5 mm.
The objective function and constraint conditions are defined for BLDCM optimization. The objective function is to minimize MT. The constraint conditions are the output torque >1.90 Nm, efficiency >84%, torque ripple (peak to peak) <0.3 Nm, cogging torque ripple (peak to peak) <30 mNm.
The response surface of output characteristics and efficiency is given in Fig. 3. The d and D are individual desirability and composite desirability, respectively. Optimum candidates PA = 0.72, SO = 1.7 mm, PO = 10.0 mm, and MT = 4.0 mm are satisfied with the efficiency and rated output requirements. The final model of BLDCM is manufactured according to the downsizing and optimal design.
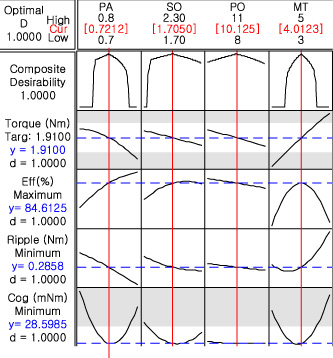
Optimization analysis in RSM.
FEM results
Comparison of original BLDCM with different controls
Figure 4 shows comparison results of original BLDCM with the six step control and twelve step control at the rated speed 1850 rpm. For the six step control, the RMS phase current and average output torque are 16.22 A and 1.89 Nm, respectively. On the other hand, in the twelve step control, the RMS phase current and average output torque are 25.20 A and 3.10 Nm, respectively. Compared to the six-step control, the average output torque of the original BLDCM using twelve step control increases similarly to the experimental results in Fig. 1.
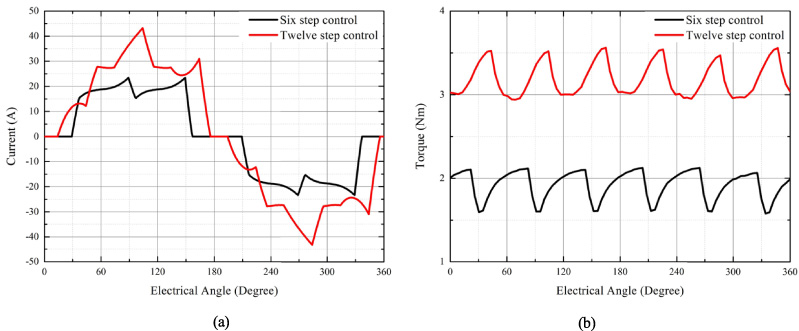
Simulated comparison results of original BLDCM with different controls (a) phase current (b) output torque.

Comparison of cogging torque.
Figure 5 shows cogging torque of original BLDCM, modified BLDCM and optimized BLDCM. Their peak to peak values are 46 mNm, 34 mNm and 28.5 Nm, respectively. The cogging torque of optimized BLDCM satisfies the constraint condition below 30 mNm.

Simulated comparison results of modified BLDCM and optimized BLDCM with twelve step control (a) phase current (b) output torque.
Figure 6 shows comparison results of modified BLDCM and optimized BLDCM with twelve step control at the rated speed 1850 rpm. In the modified BLDCM, the RMS phase current and average output torque are 16.28 A and 1.90 Nm, respectively. On the other hand, in the optimized BLDCM, the RMS phase current and average output torque are 15.25 A and 1.91 Nm, respectively. Compared to the modified BLDCM, the RMS phase current and the average output torque of the optimized BLDCM was decreased by about 1.03 A and increased by about 0.01 Nm, respectively. In the case of torque ripple, the peak to peak value of optimized BLDCM is about 0.28 Nm and satisfies the constraint condition below 0.30 Nm.
Experimental set up to test the prototype motors using dynamo test bed is shown in Fig. 7(a). Photos of the rotor and stator in original BLDCM and optimized BLDCM are given in Fig. 7(b) and (c). Load test at rated speed 1850 rpm is carried out by varying load torque from 0 Nm to 3.1 Nm. Speed, power, phase current, and efficiency were recorded and summarized in Fig. 8 and Table 2. The efficiency of optimized BLDCM at rated torque 1.88 Nm is about 84.45%, which is about 3.41% higher than the original BLDCM. In the case of the motor weight, the optimized BLDCM is about 0.4 kg lower than the original BLDCM.

Experimental setup and prototype motors (a) Dynamo setup (b) Original BLDCM (c) Optimized BLDCM.
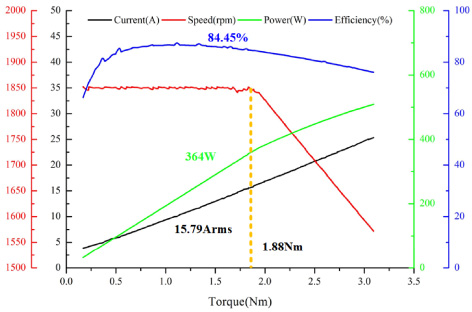
Performance curves of optimized BLDCM.
Output characteristics comparison of original BLDCM and optimized BLDCM
This paper describes the process to reduce weight and volume of BLDCM considering twelve step control by optimizing the rotor and stator using RSM. Compared with the original BLDCM, the volume and weight of proposed BLDCM decreased by 45% and 34%. Two prototype motors were built and tested. FEM analysis results and experimental results are matched, which verifies the validity of this analysis.
Footnotes
Acknowledgements
This work (No. S2482820) was supported by Business for Cooperative R&D between Industry, Academy, and Research Institute funded Korea Small and Medium Business Administration in 2017.