
Abstract
To address the problems of singularities, sensitivity to measurement noise, and low efficiency in traditional principal component analysis (PCA)-based operational modal analysis (OMA), we present a Sanger neural network principal component analysis (SNNPCA) algorithm to identify the operational modal parameters. SNNPCA is a two-layer neural network that is trained using a generalized Hebbian algorithm to ensure that its output converges to the principal components. After SNNPCA has converged, the link weights of SNNPCA correspond to the separation matrix of PCA. In SNNPCA-based OMA, the measurement response points are set as the input neurons, modal coordinate response signals are set as the output neurons, and the link weights of the neural network represent the modal shapes. Therefore, the operational modal identification process in SNNPCA is physically meaningful and convergent. Furthermore, SNNPCA inherits the parallel nature of neural network algorithms, so it is also insensitive to measurement noise. Simulation results show that SNNPCA can identify the principal modal parameters accurately using only measurement response signals. This method can be applied in embedded devices to realize online monitoring and real-time fault diagnosis.
Keywords
Introduction
Vibration modal parameters (modal shapes, damping ratios, and natural frequencies) are essential for model design and validation, as well as for ensuring the safety of a structure. Moreover, modal shapes provide a mathematical description of the vibration patterns imposed when the structure operates at its natural frequencies. Therefore, these shapes play an important role in structural modeling, dynamic modification, vibration control, and structural health, as well as for damage detection in civil, mechanical, and aerospace engineering [1,2]. Modal identification can be classified into four types: analytic solutions, finite element analysis (FEA) methods, experimental modal analysis [9], and operational modal analysis (OMA). OMA has been widely applied in civil structures [3], bridges [4], and offshore platforms [5].
In recent years, some innovative OMA methods have been proposed and applied to practical engineering. Wang and coworkers [6,7] claim that there is a one-to-one relationship between the vibration modal shapes of dynamically weakly damped mechanical structures and the linear compound matrix, and a one-to-one relationship between the modal responses and principal components was demonstrated using the concept of modal coordinates. They also presented a modal identification method based on a PCA algorithm for mechanical structures. Han and Feeny [8] applied PCA and orthogonal decomposition to OMA to demonstrate the orthogonality of the principal modes for dynamic weakly damped mechanical structures. Blind source separation (BSS) techniques have been introduced into the field of OMA [10,11], whilst Kerschen [12] focused on a physical interpretation of independent component analysis in structural dynamics. Bai et al. [13] proposed a new method based on manifold learning, termed locally linear embedding, and stochastic subspace identification methods have been applied to OMA [14].
For PCA, there are three methods of implementation. Pearson et al. [15] first proposed the use of matrix decomposition to obtain the principal components; Wold et al. [16] achieved PCA by a process of self-iteration; and the third method involves neural networks. In engineering applications, embedding algorithms into hardware devices satisfies the online, parallel and real-time needs. With the development of multi-core processors, parallel methods have several advantages over serial methods. Often, parallel extraction can be achieved by a neural network [17], with the neural network generally using embedded systems or GPUs as the underlying physical implementation [18]. Hebbs’ Rule, which was first proposed in 1949 [19], formed the basis of a neural network model for principal component extraction [20], but this could only extract the first principal component. To extract more principal components through a parallel mechanism, Sanger [21,22] developed a single-layer feedforward network. Zhe et al. [23] improved the learning rules so that the network weight vector converges to the unit orthogonal eigenvector matrix when the input matrix has multiple eigenvalues. Kung et al. [24,25] then presented the adaptive principal components extraction (APEX) network, which offers lateral inhibition and significantly lower computational complexity [24,25]. Neural Network Principal Component Analysis (NNPCA) has also been applied in the field of psychometrics [26]. This paper applies Sanger’s algorithm to OMA with the aim of realizing the parallel extraction of modal parameters.
In summary, the primary contributions of this paper are as follows:
We compare the identification methods based on PCA for OMA. Our method has the advantages of a simple physical explanation, high efficiency as a result of parallel computation, lower space and time requirements, insensitivity to measurement noise, and ease of development in embedded devices. We propose an NNPCA method that combines the Sanger neural network with PCA to identify the modal parameters in the target operating environment. This method can be applied in embedded devices to realize online monitoring and real-time fault diagnosis. Numerical simulations are designed to verify the effectiveness of our algorithm.
The remainder of this paper is organized as follows. In Section 2, the PCA model and contrasting methods are introduced. In Section 3, we describe the SNNPCA-based OMA. The simulation results are presented in Section 4. Finally, we conclude this paper in Section 5.
Related work
Mathematical model of PCA
Consider a dataset of observation signals
The goal of PCA is to find the linear transformation matrix
According to the theory of structural dynamics, for linearly time invariant (LTI) structures with m degrees-of-freedom (DOFs), the equations of vibration motion in the physical coordinates is:
For real modal analysis, the random vibration response signals of weakly damped mechanical structures can be decomposed into the inner product of modal shapes and modal responses in the modal coordinates:
In addition, the modal response vectors
The natural frequency f
i
and damping ratio 𝜉
i
can be identified using a fast Fourier transform (FFT) or single-DOF fitting technique with the modal coordinate response vector
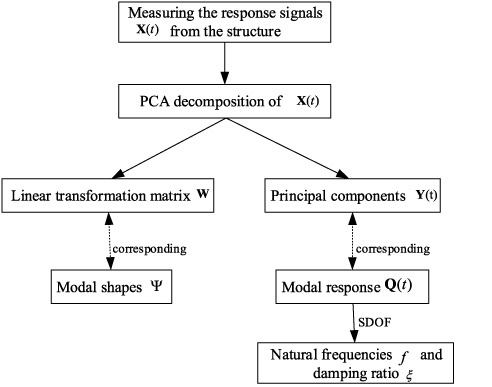
Flowchart of OMA based on PCA model.
Equations (4), (5) and the PCA decomposition show that OMA is a special case of principal component decomposition according to the mathematical description and identification of PCA. Therefore, the existence, uniqueness and deterministic nature of OMA based on the PCA algorithm can be proved by principal component decomposition.
Traditional batch PCA obtains the linear transformation matrix and principal components by eigenvalue decomposition (EVD) or singular value decomposition (SVD). However EVD and SVD suffer from the effects of ill-posed matrixes and singular value problems [27]. Self-iteration PCA computes the principal components through an iterative process, thus avoiding the problems of traditional batch PCA. However, self-iteration PCA is a serial algorithm that obtains the principal components one by one, so it does not meet the engineering requirements for embedded hardware devices. Additionally, because self-iteration PCA is a serial algorithm, cumulative errors build up. Table 1 compares three realizations of PCA.
Comparison between three realizations of PCA
Comparison between three realizations of PCA
For OMA based on NNPCA, Oja’s method [20] only extracts the first principal component, which is insufficient for OMA applications. Furthermore, the APEX algorithm [24,25] focuses on the separated principal components, and so the weight matrix does not have any physical meaning because of the lateral inhibition matrix. If APEX is used in OMA, it cannot identify the modal shape, a serious flaw that is not outweighed by its lower computational complexity. Using Sanger’s algorithm, not only are multiple principal components extracted in parallel, but the weight matrix also corresponds to the modal shape, allowing the modal shape to be exactly identified. To summarize, Sanger’s algorithm is the most suitable NNPCA algorithm for OMA. Table 2 compares the three NNPCA algorithms.
Comparison between three NNPCA algorithms
Model and training algorithm of SNNPCA
SNNPCA is a single-layer linear feedforward neural network. For the input matrix
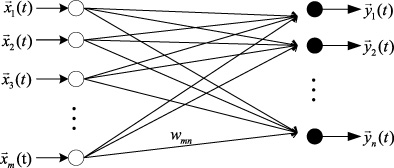
Model of SNNPCA.
Let
The SNNPCA algorithm continuously modifies the weight matrix
The weight matrix is calculated iteratively based on an optimally generalized Hebbian rule. This ensures that the output of SNNPCA converges to the principal components:
For the signal matrix
The steps of SNNPCA are described as follows.
Calculate Calculate the weight vector by applying the learning rule in parallel Update the weight matrix Calculate the error e; If e < 𝜂 or L < L
max, return to step 1; otherwise go to step 6; Obtain the final weight matrix Calculate the principal components
Once we have
Convergence analysis of SNNPCA for OMA
In our notation, assuming that the response matrix is
NNPCA algorithms are largely generated by Hebbian learning rules. These rules modify the weight matrix between two units by an amount proportional to the product of the activation of those units [19]. The Hebbian rules modify the weight matrix as follows:
However, Oja’s learning rule only extracts the first principal component from the input. Sanger [22] developed an algorithm in which a neural network is trained to find the eigenvectors of the autocorrelation matrix of the input distribution using only samples from that distribution. In this generalized Hebbian algorithm, the principal matrix
If
Sanger presented a converse proof to Theorem 1, and optimized the learning rules to extract more principal components:
OMA based on SNNPCA extracts several modal orders by setting the same number of neurons. The weight matrix
Establishment of simulation model and parameter settings
(1) The simulation model considers a simply supported beam without damping. The beam has a length of 1 m, elasticity modulus of 205 GPa, Poisson’s ratio of 0.3, and density of 7850 kg/m3.
(2) The beam is divided into 1000 equal pieces and measurements are taken at 1001 points.
(3) Response data are obtained by the resonance method, with excitations given by sine signals composed of 205, 91.3, 366, 572, 824, 1121, and 22 Hz frequencies with powers of 60, 30, 30, 30, 30, 30, and 30, respectively. The loads are concentrated resistor loadings placed at intervals of 0.2 m along the beam.
(4) The sampling frequency is 4096 Hz and the sampling number is 4096.
(5) The real modal shapes and natural frequencies are all calculated by FEA.
Simulation parameter setting and modal assurance criterion
For the simulation, we set the learning rate lr = 0.01; number of output neurons n = 5; error threshold 𝜂 = 0.001; maximum number of iterations L
max = 10000; and original weight matrix
To evaluate the accuracy of the modal shapes output in this experiment, the modal assurance criterion (MAC) is introduced [29]:
We obtained the variance contribution rate of every model through a priori knowledge. Figure 3 shows the Pareto chart of the variance contribution rate.
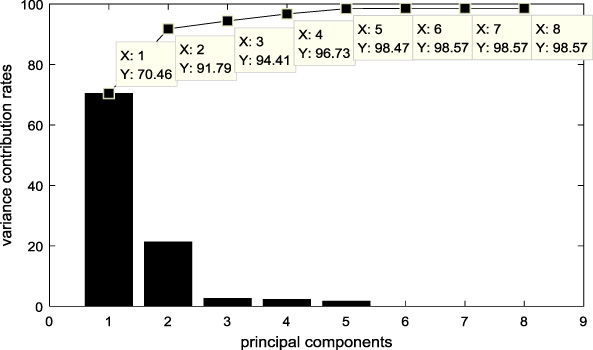
Pareto chart of variance contribution rate.
Figure 4 illustrates the FFT of each independent component, where the FFT peak frequency (horizontal axis) corresponds to the natural frequency.
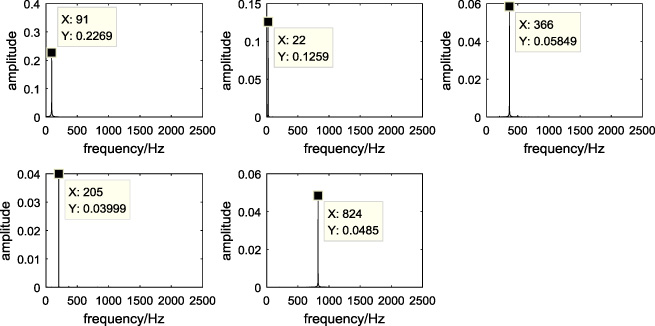
Quantitative comparison of frequency and FFT of each principal component.
Table 3 lists the real frequency and the identified frequency. The relative error is also presented. Table 4 gives the MAC value of each identified modal shape.
Comparison between identified frequency and real frequency
MAC values and comparison of modal shape.
MAC values of each identified modal shape
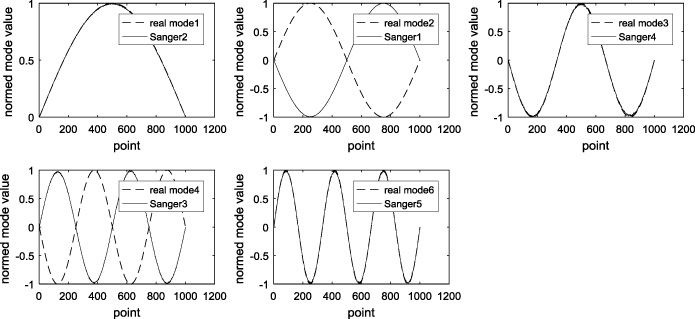
Figure 5 compares the identified modal shapes with the real modal shapes. Table 5 lists the MAC values calculated by Eq. (13) and compares those of the real modal shapes with those from the identified modal shapes.
MAC values of identified modal shapes
From Fig. 3, the cumulative variance contribution rate of the first five orders is 98.47%, which fully satisfies the project requirements. Thus, it is reasonable to use five output neurons. From Figs 4–5 and Tables 3–5, it is clear that SNNPCA accurately identifies the natural frequency and modal shape, and it is therefore applicable to OMA. From Figs 4–5, it is clear that SNNPCA is a PCA algorithm, and that the order of the identified modes depends on the variance contribution. Table 4 indicates that the MAC value of different orders is 0, which demonstrates the orthogonality between modes of different order.
Conclusions and prospects for future work
This paper has described a neural network principal parameter algorithm for identifying the operational modal parameters. The simulation results show that the proposed approach can identify nodal parameters accurately. Compared with traditional PCA, SNNPCA simultaneously extracts principal components in parallel according to the project requirements. This suggests that it could easily be embedded in multi-core hardware devices, thus improving the efficiency of computing and reducing the waste of resources.
However, it is difficult to choose optimal initial values, and this affects the convergence rate and accuracy of the algorithm. The next step is to embed SNNPCA into a multi-core hardware device and examine whether the time–space consumption satisfies our requirements. Verifying the modal ratio using experimental data identified by the Natural Excitation Technique (NExT) or Random Decrease Technique (RDT) will also be considered in future work.
Footnotes
Acknowledgements
This work was financially supported by the science and technology planning project of Quanzhou (Grant No. 2017G019 and 2018C110R), the National Natural Science Foundation of China (Grant No. 51305142, 51305143), China Postdoctoral Science Foundation Project (No. 2014M552429), and Postgraduate Scientific Research Innovation Ability Training Plan Funding Projects of Huaqiao University (No. 17013083018, 1511314011). We thank Stuart Jenkinson, PhD, from Liwen Bianji, Edanz Group China (![]() ), for editing the English text of a draft of this manuscript.
), for editing the English text of a draft of this manuscript.
Conflict of Interest
The authors declare that there is no conflict of interest regarding the publication of this article and regarding the funding that they have received.