
Abstract
A kind of giant magnetostrictive-piezoelectric composite actuator is proposed in this paper, and its magneto-mechanical-electric coupled dynamic characteristics and control are studied. New differential terms are introduced to describe the hysteretic phenomena of giant magnetostrictive materials. The coupled dynamic model of the giant magnetostrictive-piezoelectric composite actuator is developed, and its nonlinear dynamic response is obtained. Finally, the optimal control is proposed to improve the drive accuracy, and its effects are proved by experiments. The results of numerical simulation and experiments show that stochastic disturbance plays an important influence on the system’s dynamic response; stochastic optimal control can improve the actuator’s accuracy in strong stochastic disturbance. The results of this study are helpful for the optimal design and improvement of giant magnetostrictive-piezoelectric composite actuators.
Introduction
Precision actuators are widely used in industry to accomplish complex actions. The traditional precision actuator is piezoelectric actuator. Although piezoelectric actuator has high accuracy, its little electrostrictive coefficient limits its application in the case of large displacement. Giant magnetostrictive actuator has large displacement, good drive accuracy, and small size. The first kind of giant magnetostrictive material applied in actuators is Terfenol-D. It has high compressive strength, while its tensile strength is very low (only 30 Mpa). It means that Terfenol-D can not withstand tension load, which limits its application in engineering fields. Galfenol is a novel giant magnetostrictive material. It has both high compressive strength and high tensile strength, and will be a promising material for precision actuators.
Many researchers have studied giant magnetostrictive actuator. Nakamura et al. were the first to apply giant magnetostrictive actuator in microvibration control system [1]. Yan et al. developed a numerical model of displacement for giant magnetostrictive actuator [2]. Zhang et al. designed a giant magnetostrictive actuators whose output displacement is up to 100 um and the output force up to 1500 N [3]. Cao et al. proposed a dynamic hysteretic model for giant magnetostrictive actuator using hybrid genetic algorithm [4], and realized hysteresis compensation using dynamic recurrent neural network [5]. Due to the nonlinear characteristics of giant magnetostrictive materials, researchers paid many attention to nonlinear dynamic response of giant magnetostrictive actuators. Zhou et al. studied the active vibration control of nonlinear giant magnetostrictive actuators [6], and obtained nonlinear dynamic responses of beams laminated with giant magnetostrictive actuators in numerical simulation [7]. Shindo et al. analyzed the nonlinear bending response of giant magnetostrictive laminated actuators in magnetic fields [8]. Wang et al. established the nonlinear dynamic model with multi-fields coupling effects for giant magnetostrictive actuators [9]. In control fields, Zhang et al. proposed an adaptive vibration control strategy for giant magnetostrictive actuators [10]. Li et al. proposed an inverse compensation control strategy for giant magnetostrictive transducer applied in smart material electrohydrostatic actuator [11]. Although many achievements about the nonlinear dynamic response and control of giant magnetostrictive actuators have been reported, most of them did not take into account the effects of random disturbances. There are always random disturbances in industry. For example, the industry manipulator contains a large number of bearings, whose clearances affect the manipulator’s machining accuracy seriously. It is necessary to propose a precision actuator to compensate the impact of bearing clearance.
The common giant magnetostrictive actuator is suitable for open-loop control, since both Terfenol-D and Galfenol are driven by magnetic fields. To close-loop control, it is important to receive the feedback electric signal from sensors. The traditional piezoelectric actuator has self-sensing characteristics, which means that it needs no extra sensor. However, giant magnetostrictive actuator has no self-sensing characteristics, since it can only obtain feedback magnetic signal. It means that a kind of material which has self-sensing characteristics should be added to the actuator for close-loop control, which causes composite actuators. In this paper, a type of novel Galfenol-piezoelectric composite actuator is proposed to compensate the random disturbances under active control. This composite actuator has both large displacement as the common giant magnetostrictive actuator, and the self-sensing characteristics as piezoelectric actuator. Its nonlinear coupling dynamic characteristics are studied where the bearing’s clearances are considered as random disturbance, and the conditions of stochastic bifurcation are obtained. Finally, the optimal control strategy is proposed to compensate the impact of bearing clearance and improve the drive accuracy.
Nonlinear dynamic model of giant magnetostrictive-piezoelectric composite actuator
The structure of giant magnetostrictive-piezoelectric composite actuator is presented in Fig. 1. To establish the system’s dynamic model, all the characteristics of materials should be described. The displacement-voltage characteristics of PZT piezoelectric ceramics can be regard as linear However, Galfenol alloy has hysteretic characteristics. The magnetic field intensity (MFI)-strain characteristics of Galfenol alloy are shown in Fig. 2. It can not be regard as linear. Thus, we should find a way to describe the Galfenol’s hysteretic characteristics, and then establish the actuator’s dynamic model.
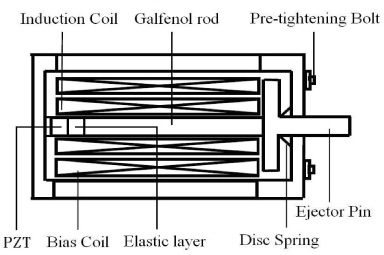
Structure of composite actuator.
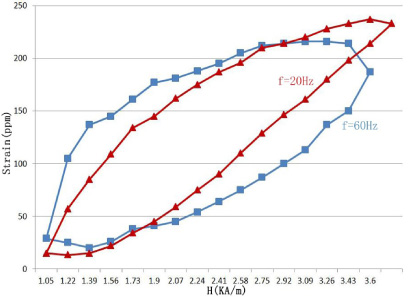
MFI-strain curves of Galfenol alloy.
In this paper, we introduce differential terms to describe the Galfenol’s hysteretic characteristics as follows:
Now we can establish the actuator’s dynamic model. In this study, Hamilton variation principle is applied in system modeling as follows:
Let the displacement of the rod end is the system’s response q.
Equation (3) is a nonlinear stochastic differential equation. According to the quasi-nonintegrable Hamiltonian system theory, the Hamiltonian function H(t) converges weakly in probability to an one-dimensional Ito diffusion process. The averaged Ito equation about Eq. (3) can be shown as follows:
The results of numerical simulation about stationary probability density (SPD) of the system are shown in Fig. 3, where c 1 = 800, c 2 = 0.6, c 3 = 1.4, c 4 = −0.27, D = 0.5, 𝜂 = 0.015.
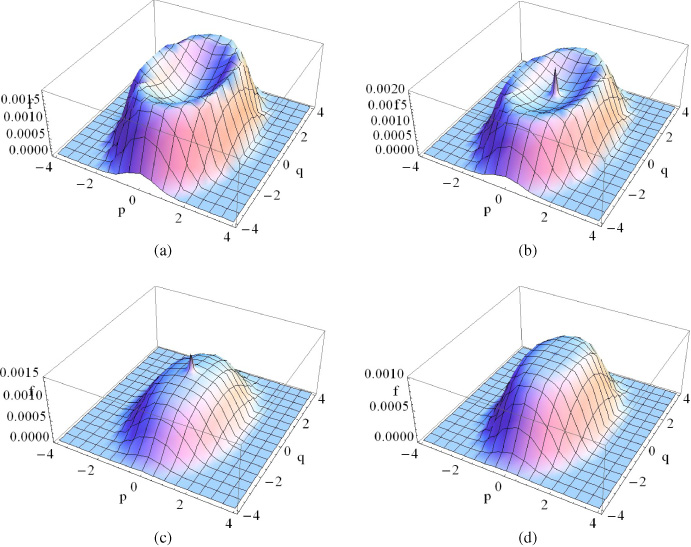
Stationary probability density of the system response. (a) K = 0.5, e = 0. (b) K = 0.5, e = 0.2. (c) K = 0.5, e = 0.5. (d) K = 0.5, e = 1.
From Fig. 3, we can see that:
There is a loop occur in the SPD map when K = 0.5 and e = 0, which are shown in Fig. 3(a). It means that the system’s motion is periodic when the composite actuator is in harmonic driving magnetic field and there is no stochastic disturbance; There are a peak and a loop occur in the SPD map when K = 0.5 and e = 0.2, which are shown in Fig. 3(b). It means that the system’s motion has two possibilities, one is periodic with large amplitude, and the other is vibration near the balance point (0, 0). Which kind of motion the system should occur is determined by the initial conditions; In the variation process of the system’s parameters, the system’s response can jump from balance point to periodic orbits under the outside excitation, which causes the bifurcation of the system; There are a peak and a platform occur in the SPD map when K = 0.5 and e = 0.5, which are shown in Fig. 3(c). The probability of the peak is higher than that of the platform, which means that the system should vibrates near the balance point (0, 0) slightly; There is a platform occur in the SPD map when K = 0.5 and e = 1, which are shown in Fig. 3(d). It means that the system’s motion is in an area, each point in the area has high probability. That is, the system’s response can appear in any point in the area, which means the system’s motion is random. To a robotic arm with an actuator, the arm’s response becomes random when the actuator is driven by harmonic currents but subjected to strong noise. Thus, it is necessary to compensate the disturbance for improving the actuator’s accuracy.
According to the results of the above section, the stochastic bifurcation appears in the process of varying the system parameters (the intensity of noise). Bifurcation changes the system’s motion, and decreases its reliability. We can see that the system’s response contains stochastic signal even in the case of weak noise. In this section, stochastic optimal control is introduced to compensate the disturbance and improve the actuator’s accuracy.
The dynamic model of controlled system can be shown as follows:
The reliability function R(H, t) of the system is determined by the dynamic programming principle shown as follows:
The stress
The experimental system is shown in Fig. 4. The experimental object is a home-made Galfenol-piezoelectric composite actuator, where the Galfenol rod is ordered from Gansu Tianxin Rare Earth Functional Materials Co., Ltd, and the PZT-5 stacking is ordered from Sinocera Piezotronics Inc. The length of the Galfenol rod is 300 mm, the length of the elastic layer is 5 mm, and the length of the PZT-5 stacking is 10 mm. The diameter of all the three materials is 20 mm. The composite actuator is placed on a CX-5 robotic arm which has three bearings, and we observe the motion of the end of the robotic arm.
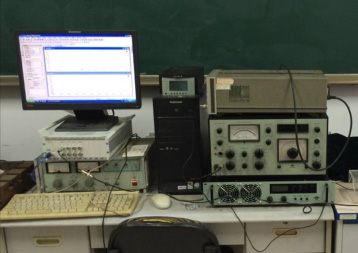
Experimental device.
When the ejector pin of the composite actuator meets bearing’s clearances, the outside excitation force will be exerted in the PZT layer through the ejector pin and the Galfenol rod. The force cause the deformation of the PZT layers, and then the PZT layers generate currents according to the piezoelectric effect. Thus, the currents will be outputted as force signal to control system and correct the actuator’s action. The signal can also be observed in the monitor. When the outside force signal is obtained, we can calculate the reliability function R(H, t) according to Eq. (11). We should set the limits of reliability firstly. When the calculated reliability R(H, t) is good (more than the limit), the actuator will not do any compensation; if the calculated reliability R(H, t) is poor (lower than the limit), the computer will try to change the currents. The changed currents will cause the deformation of Galfenol rod and generate the control force. Finally, the control force will be passed to PZT layer to generates the new force signal, and then a cyclic process is completed.
The response of open-loop control system (uncompensated system) is shown in Fig. 5, and the one of close-loop control system (compensated system) is shown in Fig. 6. We can see that the response of uncompensated system contains stochastic signals, which are caused by the bearing’s clearances; the response of compensated system contains little stochastic signal and has good drive accuracy, which shows that the stochastic control strategy we propose is effective.
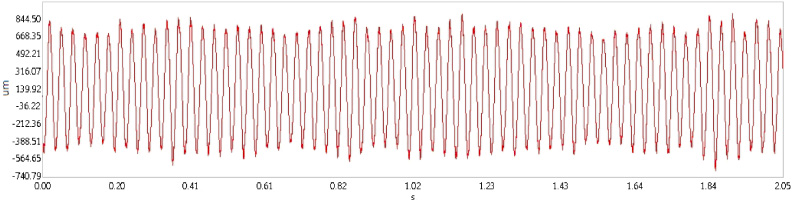
Dynamic response of the uncompensated system.
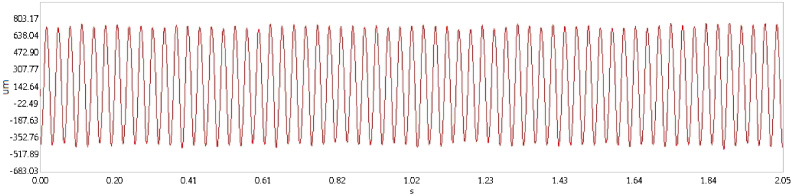
Dynamic response of the compensated system.
A kind of Galfenol-piezoelectric composite actuator is proposed in this paper, and its nonlinear dynamic characteristics and control are studied. New differential terms are introduced to describe the hysteretic phenomena of Galfenol’s strain-magnetic field intensity curves. The nonlinear dynamic model of the Galfenol-piezoelectric composite actuator is developed, and its nonlinear dynamic response is obtained. Finally, the optimal control is proposed to improve the drive accuracy. The results of numerical simulation and experiments show that stochastic disturbances play an important influence on the system’s dynamic response; when the noise is slight, the system’s motion is periodic; when the noise is strong, the system’s motion is random; stochastic optimal control can improve the actuator’s accuracy in strong stochastic disturbance. Galfenol-piezoelectric composite actuator has self-sensing characteristics and large displacement, and is a promising actuator in precision machining field. The results of this study are helpful for the optimal design and improvement of Galfenol-piezoelectric composite actuators.
Footnotes
Acknowledgements
The authors gratefully acknowledge the support of the Natural Science Foundation of China (NSFC) through Grant Nos. 11872266 and 51875396, Chinese Aviation Science Foundation through Grant No. 2016ZA48001, the Tianjin Research Program of Application Foundation and Advanced Technology through Grant No. 16JCYBJC18800, and Cast-Bisee 511 through Grant No. CAST-BISEE2017-006.