
Abstract
An energy-efficient description of electromagnetism based on a reversible interpretation of Faraday’s Law is described. Space aggregation and time reconciliation of all scales involved in power system management are derived from two constants of motion, respectively Gibbs free energy and kinetic energy embedded in the whole system. At the upper space scale, a simplified description of the grid based on the Kuramoto model is proved to be suitable for assessing the stability of the synchronous state of a power system. In addition, the Gibbs free energy embedded in the power grid takes the form of a X − Y lattice-gas Hamiltonian, showing the critical role of reactive power in maintaining synchronism. Finally, the transient stability of the power system is considered from these two constants of motion, before any operation from the dispatch.
Introduction
Power system generation has to adapt in real time to consumption, which is highly fluctuating and only partly predictable. Two intricate problems are concerns for grid operators and utilities, involving several time-scales [1]:
Keeping the power system quantities within the security margins during normal and transient operations, notably frequency and voltage plan [2]; Handling the evolution of power systems which is driven by political, economic, social and environmental issues addressed through long-term energy planning models.
In order to address the considerable challenge of grid decarbonization and the subsequent massive introduction of intermittent electricity production, a general framework is needed that:
aggregates the space characteristics of the power grid; reconciles the short-term dynamics of power system management and the prospective analysis in the long-term;
As expected based on uniform time [3], this contribution derives two energy-based constants of motion from first principles (Section 2). Then:
Usually, thermodynamic approaches to electromagnetics do not consider any extension towards time-varying regimes [4]. Although some improvements for steady-states regimes are summarized in [5], no general contribution covers transient regimes. As a general rule in this paper, variational parameters and functionals are denoted by italics. A roman font is used to specify their minimum values. The magnetodynamic behavior of any electrical system that externally receives net mechanical power Pmech and embeds kinetic energy Ekin is derived from the functional expressing the second principle of thermodynamics and establishing the difference between the mechanical power received by the field from the actuators
the magnetic field the Joule losses monitored in conductors. This term is quadratic to respect invariance of losses with inversion of time (σ−1 > 0 is the resistivity); the variation with time of the electromagnetic energy coupling the field with the generator supplied by the net current I0 and the mass at the potential V0; the magnetic
Extending the electric field in the conductor according to Ohm’s Law with motion:
For a local focus on design or power management, the electrical power:
As matter of fact, free current density exhibits well-split scales allowing a mean-field hypothesis where the global minimization in (1) is replaced by embedded minimizations on the various scales involved by the power conversion of the electrical system [8], from deep within the material [9] to the whole electrical system [10]. In addition, the power functional (1) exhibits two energy-based invariants under steady-state evolution, namely the kinetic energy and the Gibbs free energy. They are also called constants or integrals of motion [3]. While the latter enforces synchronism between the machines and provide a way to aggregate kinetic energy over the whole grid (Section 3), the former acts to absorb any transient disturbances (Section 4).
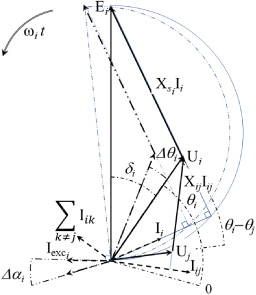
Phasor diagram of the generator 𝛩
i
with an internal admittance X
s
i
connected to the machine 𝛩
j
by the admittance X
ij
of the power grid. While θ
i
(t) is the terminal voltage angle with respect to the synchronous reference frame (denoted by 0), δ
i
is the electrical internal voltage phase angle – also called power angle – of the machine i. The mechanical rotor angle is
It is convenient to perform a partition of the whole power system between the machines and the grid elements. The per phase contribution to the Gibbs free energy reads:
the first summation is performed on the generators, G
i
denoting the contribution of the machine i; while the second summation is performed on the set of edges
Noticing the similar variations for the mechanical rotor angle 𝛼
i
and the terminal voltage angle θ
i
, the per phase contribution to the averaged electrodynamic torque acting on the rotor is derived within a quasi-static evolution of the machine i from a stationnary condition on G:
expresses a trend to align the terminal voltage angle of the machine i with that of machine j; conserves the flow between the active power supplied by the lossless machine i and the electric power transferred from node i to the grid; illustrates that the Gibbs free energy and the electrodynamic torque are dependant on the voltage plan.
By introducing the moment of inertia J
i
, the linear friction 𝜅
i
and the apparent power S
i
of the machine i, the normalized swing equations for each connecting point i, tracked from the deviation of the terminal voltage phase θ
i
, are obtained by multiplying the dynamic equation of the rotor with the rated pulse ω
i
[2]:
the reduced inertia of the machine obeys: the reduced damping term reads: the per unit net mechanical power supplied to the grid follows: the per unit apparent power in the lossles line 〈i, j〉 is given by:
The coupled oscillator model (13) is a second order system of X − Y spins [11] that aim to minimize the valuations of the bidimensional lattice-gas Hamiltonian with respect to the terminal voltage phase θ
i
:
the first term provides a pair-wised trend to the alignement of the spins: the second term (which) represents the energy of an external field driving the spins away from the “all-aligned” state:
From a dynamic point of view, it is convenient to study the set of Eq. (13) within a second order Kuramoto’s model [15]. This model was initially proposed to describe the first order evolution between any population of non-linear coupled oscillators that are all inter-connected [16]. Kuramoto’s model has been subsequentlly extended to more general, not necessarily complete, networks [17,18]. It has also been adapted to a power grid context. Sufficient conditions for steady-state solutions of (13) being locally and exponentially stable were established in [19,20]. These conditions are expressed as functions of grid algebraic connectivity
At the power management level, the steady state of any power grid is operated within a time-harmonic regime at the frequency
The RHS of (22) is focused on the transient stability of the system, providing reactive power and kinetic energy to deal with any sudden disturbances, before any control operation from the dispatch. Besides, The LHS of (22) is related to system adequacy thanks to the primary, secondary and tertiary controls, consisting in an adjustment of the mechanical power supplied to the system to successively restore: (i) a balance between supply and demand, (ii) the rated point, and (iii) an economic optimum for the utility.
In order to have the kinetic energy as high as possible whithout lowering it in Joule losses in the face of a sudden disturbance and to delay any operations of power management as long as possible, it appears critical to synchronize the grid to aggregate the available kinetic energy over the whole system.
As expected based on uniform time, two energy-based constants of motion were theoretically derived from the second principle of thermodynamics expressed in a power system. These are field-related and provide the minimum set of conditions by which the power system may be operated:
The Gibbs free energy of the electromagnetic field is related to the synchronism between the machines occuring at the rated frequency. Synchronism results from competition between the grid’s connectivity and the expected congestion and guarantees that the power system will naturally go back to a phase cohesive state after a small disturbance. Thus, a suitable level of Gibbs free energy allows a space aggregation of the kinetic energy over the whole grid. The kinetic energy embodied in the power system is related to the motion of the machines in the Galilean earth frame. Provided that the synchronism is maintained over the grid, the kinetic energy deals with any sudden disturbance wherever its location and before any control operation from the dispatch (typically for a few dozens of seconds).
A reliability constraint on kinetic energy was endogenized in the technical optimal TIMES model [21] to reconcile short-term dynamics of power management with long-term prospective analysis. For the specific case of Reunion Island and on the condition that the grid could be made significantly stronger, it demonstated that [22]:
electrochemical storage technology potentially contributes to power dynamics and its reliability; and a high share of variable renewable plants can be considered without jeopardizing power transmission.
A similar study is under way for France [23].
Footnotes
Acknowledgements
This research was supported by the Modeling for Sustainable Development Chair, led by MINES ParisTech, Ecole des Ponts ParisTech, AgroParisTech, and ParisTech; and supported by ADEME, EDF, GRT Gaz and SCHNEIDER ELECTRIC.