
Abstract
The diverging stepped magnetic fluid seal based on stepped labyrinth seal was an effective method to improve the capability of usual magnetic fluid seal with large gap. Pressure theory of the diverging stepped magnetic fluid seal was presented and a diverging magnetic fluid sealing with two magnetic sources was designed. The leakage location hypothesis in the diverging stepped magnetic fluid seal has been made. The magnetic field distributions in the radial and axial sealing gaps have been calculated by means of the finite element method of magnetic field and its maximum sealing capabilities have been calculated based on its pressure theory. The effects of radial and axial sealing gaps on the diverging stepped magnetic fluid seal have been obtained. The numerical and experimental results were analyzed and discussed. The results show that the theoretical pressure-resistant capabilities of the diverging stepped magnetic fluid seal with two magnetic sources agree well with its experimental pressure-resistant capabilities. The leakage path in the axial sealing gap located at its center position and the leakage path in the radial sealing gap located in the vicinity of the shaft.
Introduction
Magnetic fluid seal is one of the important applications of nano magnetic fluid material, which has the advantages of zero leakage, long life, high reliability, and no pollution [1–5]. It is is widely used in rotating condition because of these advantages [6–8]. However, in the field of high speed circumstance which require sealing gap larger than 0.3 mm, the usual magnetic fluid sealing performance decreases significantly with the increase of the sealing clearance. So, improving the pressure capability of magnetic fluid seal is of significance to apply it into high speed and heavy load occasion which require large gap [9–11]. The stepped magnetic fluid seal is a new type of sealing structure and is proposed based on stepped labyrinth seal which is used for improving the pressure capabilities of usual magnetic fluid seal with large sealing gap. The previous experimental results show that it is an effective method to improve the capabilities of the usual magnetic fluid seal with large gaps [12]. However, the leakage path study of diverging stepped magnetic fluid seal with large gap has not been reported. In order to calculate the theoretical pressure capability of magnetic fluid seal, the leakage paths hypothesis have been presented and the effects of the radial and axial sealing gaps on its capabilities have been studied numerically. It provides important reference for designing the structure of the diverging stepped magnetic fluid seal with large gap.
Two dimensional physical model of the diverging stepped magnetic fluid seal.
One of the most important parameters of magnetic fluid seals is a value of the critical pressure. The value of critical pressure can be calculated by the Bernoulli equation [5]
The total pressure capability of a diverging stepped magnetic fluid seals can be calculated as follows:
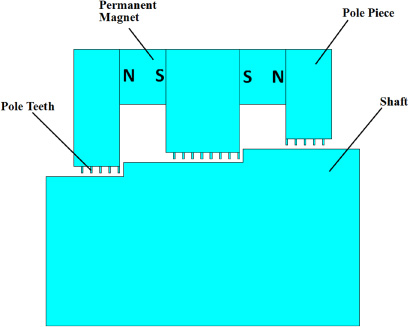
In order to determine the leakage position of the diverging stepped magnetic fluid sealing structure and to calculate the theoretical pressure capabilities of the diverging stepped magnetic fluid seal, the diverging stepped magnetic fluid sealing structure with two magnetic sources was designed, which is shown in Fig. 1, and its basic structural parameters are shown in Table 1. According to the structural parameters in Table 1. The permanent magnet used in the diverging stepped magnetic fluid seal is Nd-Fe-B material. Its coercive force and permeability are H C = 1356 kA/m and 1.05 respectively. Both of the pole piece and the stepped shaft materials are 2Cr13. Magnetic fluid are selected as oil based magnetic fluid and its saturation magnetization is 30.7 kA/m The boundary condition is that magnetic field lines are parallel to two dimensional physical model boundaries. The magnetic field distributions in the axial and radial sealing gap can be obtained by use of ANSYS MULTIPHYSICS product in finite element analysis software of ANSYS.
Parameters of the diverging stepped magnetic fluid seal
Parameters of the diverging stepped magnetic fluid seal
Hypothesis of leakage position
In order to accurately calculate the theoretical pressure capabilities of the diverging stepped magnetic fluid seal with two magnetic sources, it is necessary to investigate the most easily leakage position of the diverging stepped magnetic fluid seal. The following assumptions have been made. Once the diverging stepped magnetic fluid seal fails, the leakage channel of the sealed medium is straight in the radial and axial sealing gaps and happens at the location of the minimum magnetic field gradient. When both of radial and axial sealing gaps are 0.4 mm, the sealing gaps can be divided into five possible leakage channel. The magnetic field distributions at the position of 0, 0.1 mm, 0.2 mm, 0.3 mm and 0.4 mm far from the stepped shaft in the radial and axial sealing gaps are studied respectively, as shown in Fig. 2 and Fig. 3.

Magnetic field distributions in the left (a) , middle (b) and right (c) radial sealing gaps of the diverging stepped magnetic fluid seal. Magnetic field distribution: (i) at the stepped shaft side; (ii) at a distance of 0.1 mm from the stepped shaft; (iii) at the middle position of the radial sealing gap; (iv) at the 0.3 mm position far from the stepped shaft; (v) on the pole piece side.
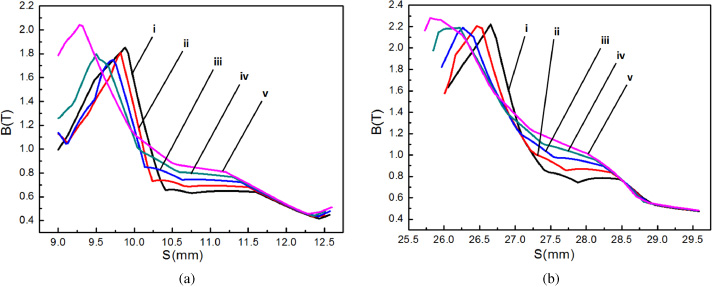
Magnetic field distributions in the middle (a) and right (b) axial sealing gaps of the diverging stepped magnetic fluid seal. (i) near the stepped shaft side; (ii) at a distance of 0.1 mm from the stepped shaft; (iii) at the middle position of the axial sealing gap; (iv) at a distance of 0.3 mm from the stepped shaft; (v) on the pole piece side.
As it can be seen from Fig. 2, when the track position moves from the shaft side to the pole tooth side, the magnetic field distributions in the left, middle and right radial sealing gaps of the diverging stepped magnetic fluid seal with two magnetic sources show that all of them increase gradually and get bigger and bigger. The magnetic flux densities differences in the left, middle and right radial sealing gaps of the diverging stepped magnetic fluid seal with two magnetic sources increase. That implies that the leakage happens at the location near the shaft side in the radial sealing gap. The reason for increase is that that the polar teeth in the radial sealing gaps are closer to the magnetic sources in the magnetic circuit compared to the shaft side in the radial sealing gap so that the magnetic field intensity and the magnetic flux density difference in the radial sealing gap near the stepped shaft side are smaller than the values near the polar teeth. So the pressure capabilities in the radial sealing gaps near the stepped shaft side of the diverging stepped magnetic fluid seal with two magnetic sources are weakest and this location becomes the easiest leakage position in the radial sealing gap.
As it can be seen from Fig. 3, when the possible leakage position moves away from the shaft to the pole tooth side, the magnetic flux densities in the middle and right axial gaps increase. The reason is that magnetic flux density becomes stronger when it is near the permanent magnet. However, the maximum value of the magnetic flux density in the axial sealing gap first reduce and then increase. The minimum value of the magnetic flux density in the axial sealing gap is almost the same. So, the magnetic flux densities differences in the middle and right axial gaps first reduce and then increase. That means that the leakage of the sealed medium likely occurs at the middle position of the axial sealing gap.
The critical theoretical pressure capability of the diverging stepped magnetic fluid seal is related to the magnetic flux density difference occurred at the leakage location. So, calculation the magnetic field distributions at the possible leakage location in the radial and axial sealing gaps is of great significance. When the axial sealing gap is 0.4 mm, according to the leakage location hypothesis, magnetic field distributions at stepped shaft side of the radial sealing gap and the middle position of the axial sealing gap in the diverging stepped magnetic fluid seal with two magnetic sources are shown in Fig. 4.
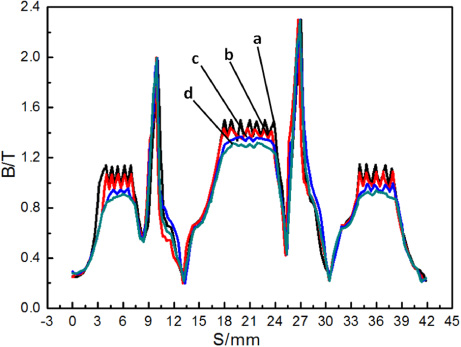
Magnetic field distributions under different radial sealing gap: a for 0.4 mm; b for 0.5 mm; c for 0.6 mm; d for 0.7 m.
It can be found from the Fig. 4 that when the axial sealing gap keeps constant and the radial sealing gap height increase from 0.4 mm to 0.7 mm, the magnetic flux density in the radial sealing gap dramatically decreases. At the same time, the magnetic flux density in the axial sealing gap formed between the pole piece and the stepped shaft also decreases slightly with the increase of the radial sealing gap height. The reason for this decrease is that when the axial gap width is constant, the relation between the radial sealing gap and the axial sealing gap are parallel connection in the magnetic circuit. So increasing the height of the radial sealing gap inevitably increases the reluctance of the radial sealing gap and the reluctance of the entire magnetic circuit. As a result, the total magnetic flux in the magnetic circuit decreases, and the magnetic flux in the radial sealing gap and the axial sealing gap also decreases according to the law of magnetic circuit.
It is not difficult to find from Fig. 4 that when the height of the radial sealing gap is greater than 0.6 mm, the magnetic flux density difference in the radial sealing gap can be omitted. It implies that magnetic pole teeth can not cause any effect. So, when the height of the radial sealing gap is greater than 0.6 mm, reducing the amount of pole teeth can save the cost.
It is still not difficult to find from Fig. 4 that the maximum magnetic flux density in the axial sealing gap is larger than that in the radial sealing gap. The reason is that when the axial sealing gap width is constant and the radial sealing gap height is larger than it, the magnetic reluctance in the radial sealing gap is larger than that in the axial sealing gap. So, the maximum magnetic flux density of the axial gap in magnetic circuit is larger that of the radial sealing gap according to the law of magnetic force.
According to magnetic field distributions at stepped shaft side of the radial sealing gap and the middle position of the axial sealing gap in the diverging stepped magnetic fluid seal from the Fig. 4 and the theory of diverging stepped magnetic fluid seal, pressure capabilities of the diverging stepped magnetic fluid seal with two magnetic sources can be calculated and comparisons between theoretical and experimental values of the diverging stepped magnetic fluid seal are shown in Fig. 5.
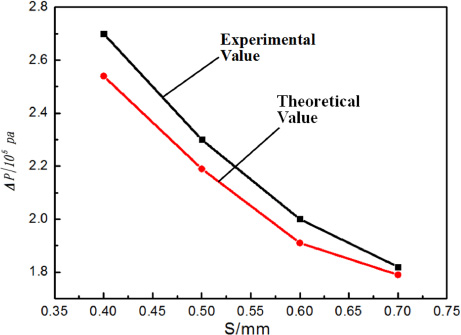
Comparison of theoretical and experiment values of the diverging stepped magnetic fluid seal pressure capability in different radial sealing gap.

Magnetic field distributions under different axial sealing gap: a is for 0.4 mm; b is for 0.6 mm; c is for 0.8 mm; d is for 1.0 mm.
It can be found from the Fig. 5 that the theoretical and experimental pressure capabilities of the diverging stepped magnetic fluid seal decrease with the increase of the height of the radial sealing gap which is the same with the pressure capacity change regulation of the ordinary magnetic fluid seal. It shows that the magnetic fluid seals in the axial and radial sealing gaps cause effects at the same time. The reason is that when the axial sealing gap keeps constant and the radial sealing gap height is larger than the axial sealing gap width, magnetic reluctance of sealing gap increases with the increase of the radial sealing gap height. The magnetic flux density in the radial and axial sealing gap decreases according to the law of magnetic circuit, which will result in a decline in the total pressure capacity of the diverging stepped magnetic fluid seal.
It is still not difficult to find from the Fig. 5 that the maximum error between the theoretical and experimental values of the diverging stepped magnetic fluid seal is no more than 0.2 atmospheric pressure, which shows that they are in good agreement. It also proves that the theory and the leakage location hypothesis of the diverging stepped magnetic fluid seal are correct.
When the radial sealing gap is 0.7 mm and keeps constant, according to the leakage location hypothesis, magnetic field distributions at stepped shaft side of the radial sealing gap and the middle position of the axial sealing gap in the diverging stepped magnetic fluid seal with two magnetic sources are shown in Fig. 6.
It can be seen from the Fig. 6 that when the axial sealing gap height increases from 0.4 mm to 1.0 mm in the intervals of 0.2 mm, the magnetic flux density in the axial sealing gap of the diverging stepped magnetic fluid seal dramatically decreases with the increase of the axial sealing gap width. The reason is that the magnetic reluctance of sealing gap increases with the increase of the axial sealing gap width. So, the magnetic flux density in the axial sealing gap decreases according to the law of magnetic circuit. However, the magnetic flux density in the radial sealing gap almost keeps unchanged and its difference in the radial sealing gap can be omitted. The reason for this is that when the sealing gap size is larger, the amount of the pole teeth can not cause any effect.
According to magnetic field distributions at stepped shaft side of the radial sealing gap and the middle position of the axial sealing gap and the theory of diverging stepped magnetic fluid seal, its pressure capabilities can be calculated and when the radial sealing gap is 0.7 mm and the different axial sealing gap changes from 0.4 mm to 1.0 mm in the intervals of 0.2 mm, comparisons between theoretical and experimental values of the diverging stepped magnetic fluid seal are shown in Fig. 7.

Comparison of theoretical and experiment values of the diverging stepped magnetic fluid seal pressure capability in different axial sealing gap.
It can be found from the Fig. 7 that the theoretical and experimental pressure capabilities of the diverging stepped magnetic fluid seal decrease with the increase of the width of the axial sealing gap. This phenomenon is the same with the pressure capacity change regulation of the ordinary magnetic fluid seal. It shows that the magnetic fluid seals in the axial and radial sealing gaps cause effects at the same time. The reason is that when the radial sealing gap height keeps constant, magnetic reluctance of sealing gap increases with the increase of the axial sealing gap width. The magnetic flux densities in the radial and axial sealing gap decrease according to the law of magnetic circuit, which will result in a decline in the total pressure capacity of the diverging stepped magnetic fluid seal.
It is still not difficult to find from the Fig. 7 that the maximum error between the theoretical and experimental values of the diverging stepped magnetic fluid seal is no more than 0.1 atmospheric pressure, which shows that they are in good agreement. It also proves that the theory and the leakage location hypothesis of the diverging stepped magnetic fluid seal are correct.
In this paper, the structure of a diverging stepped magnetic fluid seal with two magnetic sources has been designed. The theory and the leakage position hypothesis of the diverging stepped magnetic fluid seal have been presented. The finite element method is utilized to calculate the magnetic field distributions in the sealing gaps of the diverging stepped magnetic fluid seal with two magnetic sources and its theoretical results have been obtained. The theoretical results of the diverging stepped magnetic fluid seal are compared and analyzed with its experimental results. The results show that the pressure capabilities of the diverging stepped magnetic fluid seal not only depends on the radial sealing gap but also on the axial sealing gap. When the axial sealing gap is 0.4 mm and the radial sealing gap is changed from 0.4 mm to 0.7 mm, the pressure capabilities of the diverging stepped magnetic fluid seal decrease with the increase of the radial sealing gap. When the radial sealing gap is 0.7 mm and the axial sealing gap width is changed from 0.4 mm to 1.0 mm, the pressure capabilities of the diverging stepped magnetic fluid seal decrease with the increase of the axial sealing gap. The theoretical results of the diverging stepped magnetic fluid seal are in good agreement with its experimental results which proves that the theory and the leakage location hypothesis of the diverging stepped magnetic fluid seal are correct. The leakage locations in the radial and axial sealing gap occur at near the shaft side and the middle position of the axial sealing gap respectively.
Footnotes
Acknowledgements
The authors gratefully acknowledge the support of National Nature Science Foundation of China (Grant No. 51375039),the support of the Science and Technology Project of Guangxi Province (Grant No. 2016GXNSFBA380213), the support of Innovation Project Of GuangXi Graduate Education (Grant No. YCSW2018200), and the support of the Science and Technology Project of Liuzhou (Grant No. 2017BC20204).