
Abstract
Although rare earth materials are actively utilized in permanent magnets for a wide variety of applications including electric vehicles and trains, the cost of these materials is on the rise. Therefore, the synchronous reluctance motor (SynRM) which does not require permanent magnets is remarkable from the perspective of high efficiency and low cost. However, the torque characteristic of the SynRM is much lower than that of the interior permanent magnet synchronous reluctance motor (IPMSM). Then, a permanent magnet assisted synchronous reluctance motor (PMASynRM) which bonded magnet was attached to the rotor structure of SynRM has been proposed. The manufacturing cost of the PMASynRM is lower than that of the IPMSM because a bounded magnet is utilized former. In this work, the structure of the PMASynRM has been drastically changed by topology optimization to average torque maximization and cogging torque minimization.
Keywords
Introduction
The interior permanent magnet synchronous reluctance motor (IPMSM) using a neodymium magnet made from rare earth materials is currently used in electric vehicles, trains and other applications. However, because the cost of rare earth material is continuously increasing, the synchronous reluctance motor (SynRM), which does not require a permanent magnet, is of great interest from the perspective of high efficiency. Specifically, the efficiency of SynRM has been improved beyond the induction motor [1]. However, the torque characteristic of SynRMs is much lower than that of the IPMSM. To improve the torque characteristic, the permanent magnet assisted synchronous reluctance motor (PMASynRM), in which a bonded magnet [2,3] is attached to the rotor structure of the SynRM, is proposed in [4].
In conventional SynRM and PMASynRM research, the rotor structure design has been attempted such as raise the torque [5] and torque ripple reduction structure [6]. However, topology optimization of PMASynRM has not been reported to date. In this investigation, the aim is to design the rotor structure of the PMASynRM to improve its torque characteristic using topology optimization. Because topology optimization has a high flexibility of design, the rotor structure is drastically changed.
In this report, topology optimization based on the Heaviside function aimed at average torque maximization and cogging torque minimization was applied to the rotor structure of PMASynRM. Suppression of motor noise and vibration is expected with a reduction in the cogging torque. Coefficients are provided for each objective functions, the optimization which increasing the coefficient for the cogging torque minimization is investigated. In the optimized structure, the torque average and cogging torque are improved.
Method of topology optimization
Finite element method
The governing equation is formulated in magnetostatic field, which can be written as follows:
Topology modelling based on Heaviside function.
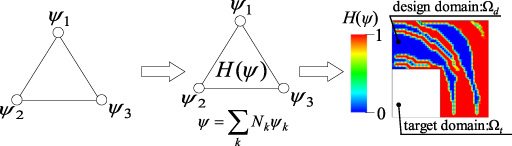
Figure 1 shows the topology optimization based on the Heaviside function. When the smoothed Heaviside function H (𝜓) [7] is applied to the approximated characteristic function, the reluctivity 𝜈(
Sensitivity analysis based on the adjoint variable method (AVM) [8] allows for the calculation of the sensitivity for all design variables. In finite element analysis considering magnetic nonlinearity, the update formula of the Newton-Raphson (NR) method is defined as follows:
By solving the adjoint equation of (8), the adjoint variable
The optimization problem is defined as follows:
In the R-SLP, the move limit ζ is introduced to prevent over-modification, and it is defined as the step size of the design variable update. This limit is reduced only when the objective function vibrates, and the move limit at ζ(k) the k-th iteration steps decelerates as follows:
PMASynRM model.
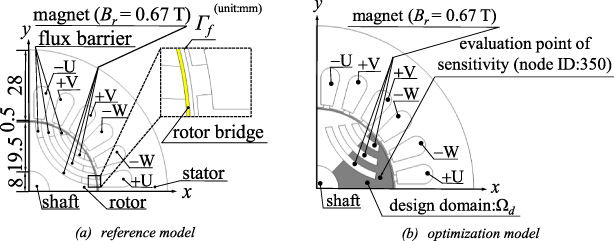
Figure 2(a) shows the reference model of PMASynRM. The magnetic material for the rotor and stator core is T50A1300, and the material for the rotor shaft is S45C. Figure 2(b) shows the optimization model, in which the rotor area except the region of the magnet and rotor bridge are set to the design domain 𝛺
d
. To facilitate manufacturing, the mirror symmetry condition of the design variable is applied, and half of the domain for 1 pitch is set to the design domain. The type of permanent magnet is bounded magnet (B
r
= 0.67 T). The design variables are the values for the material density in the design domain. PMASynRM is operated using a three-phase current as i
u
(t), i
v
(t) and i
w
(t) as follows:
In this section, average torque maximization and cogging torque minimization of PMASynRM is investigated.
Optimization parameter
Optimization parameter
Figure 3 shows the result of sensitivity analysis at node ID:350. In the case of
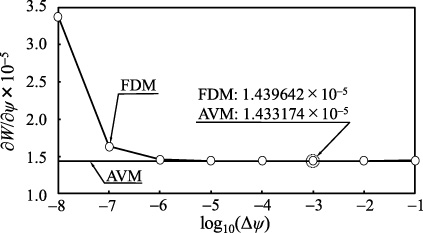
Sensitivity analysis result of node ID:350.
Optimized structure.
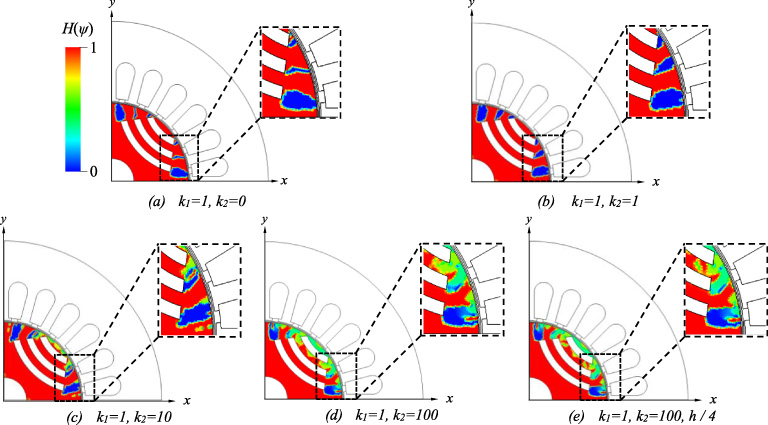
Figure 4 shows the optimized structure. With the increase in k 2, many gray-scales remained at the edge of the rotor. The optimized structure Fig. 4(d) is similar to Fig. 4(e). Because the case of k 1 = 1, k 2 = 0 and k 1 = 1, k 2 = 1 is no gray-scale, a satisfactory rotor structure was obtained. From the convergence characteristics of the objective function, vibration is suppressed by decelerating the move limit. It is necessary to reduce the initial ζ because oscillations of the objective function are strongly generated in the region less than the 50-th step optimization iteration.
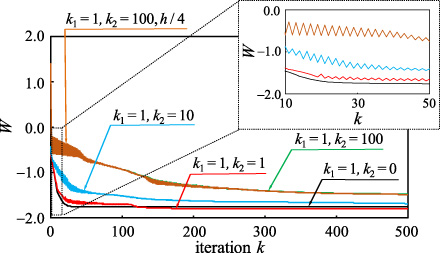
Convergence characteristics of the objective function.
Figure 5 shows the results for the torque characteristics. The torque characteristic for the case of k 1 = 1, k 2 = 100 is similar to that of k 1 = 1, k 2 = 100, h∕4. Figure 6 shows the results of the cogging torque characteristics. When k 2 is larger than k 1, the cogging torque can be reduced significantly. Table 2 presents the average torque and torque ripple t r of each structure. In the case of k 1 = 1, k 2 = 1, the average torque is higher, and the cogging torque is lowered than the reference model. Although the cogging torque is lower by increasing k 2, the average torque does not exceed that of the reference model. The elapsed time in each optimization case became less than half a day. The source code is written in C language.
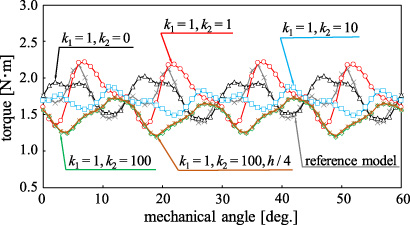
Torque characteristics.
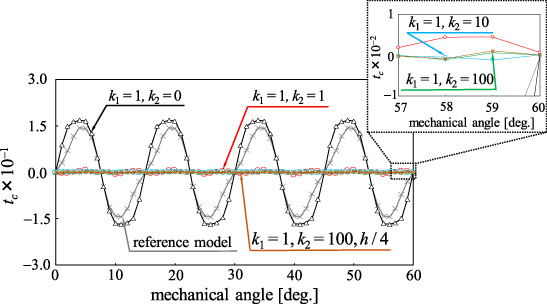
Cogging torque characteristics.
The average torque and the cogging torque of the PMASynRM were improved by topology optimization. When the coefficient of the cogging torque minimization is larger than the coefficient of the average torque maximization, the cogging torque can be reduced significantly. However, the average torque is lower than that of the reference model. Even though the transition width of the Heaviside function was reduced, many gray-scales remained. When the coefficients were the same, a higher average torque and lower cogging torque was obtained for the rotor structure.
Optimization result
CPU:Intel Core i7-6850K 3.6 GHz & 128 GB.