
Abstract
The live working paths for equipotential operators in the hanging basket method is determined by minimum safety values of various clearances stipulated in regulations. However, the optimization of the safety path planning by the complex gaps is scarce. In this paper, an optimization method for path planning is proposed based on ant colony algorithm. Grid model is established to partition the operation area into different calculation districts, in which key parameters are grid data and obstacle grids. Grid data are the maximum value of the electric field strength on the body surface, calculated by the finite element model. And obstacle grids are grids that dissatisfy the requirements of complex gaps and their data are larger than the air breakdown field strength. Then ant colony algorithm is employed to search for the best operation path with the minimum working distance and the minimum electric field strength value. After that, an application case is illustrated to demonstrate the optimizing processes. At last, the shock U50 test and power frequency corona discharge test are implemented to verify the safety of the optimized path. Therefore, the path obtained by the proposed method scientifically and effectively shortens the distance of the hanging basket method.
Keywords
Introduction
Live working is an essential means for the maintenance during operation in high-voltage AC and DC lines without power outages. The usual live working methods include ladder method, access method along the insulator string and hanging basket method. The last is the most common means in ultra-high voltage (UHV) transmission line. Generally, the basket is controlled to stop at the required operation position according to the judgment by experience and operation regulations firstly, and the horizontal distance between the basket and the wire side is 0.6 m. Then, the operator quickly performs an equipotential operation. Equipotential work means that the operator directly contacts the live equipment after insulating the ground with the help of various insulating appliances, and the potential of the human body is equal to the potential of the charged body.
In China, to judge the horizontal distance between the operator and the high-voltage components, many relevant operating technical standards and specifications are formed, in which only minimum safety values for various gaps are specified for live working. For instance, the standard, named Technical guide for Live Working on 1000 kV AC transmission line (DL/T 392-2015), only stipulates that the minimum safe distance between on-site operators and adjacent conductors is 6.9 m. Even if the measurement distance is the same as the requirements of the regulations, the electric field strength on the body surface of the operator is different due to different operating methods or other factors. In the actual operation process, the minimum air gap defined by the regulations and standards is not enough to guide the actual operation. Therefore, path planning based on the electric field strength of the operator’s body surface to fulfill requirements of the regulations and personnel safety is required.
The path planning needs taking the electric field strength on the body surface of the operator into account, and tests are required to ensure the safety of actual operation. At present, many mature researches have been taken on field strength calculation and test. The literature on the safety of operators focuses on numerical simulation calculations and simulation tests. The electric field strength on the body surface at a typical location during the live working process is analyzed through simulation calculations [1–5]. Based on the results of the operating shock discharge test, the close relationship between the electric field distribution and U50 is verified, and the minimum safety clearance required for different live working paths is calculated and analyzed [6–8]. By comparing and selecting different positions of the electric field through comparison, different field strength analysis methods are used to calculate the human surface field strength values at typical operating positions [2,5].
Compared with many other countries, the development of live working technology in China is relatively backward in the early stage. As early as the beginning of the last century, many countries began to conduct related research on live working, and carried out corresponding promotion and application. At this stage, a complete operation method for live working has been formed. Up to now, many other countries in the world have begun to use helicopters for live working. The cost of this operation technology is high, but the work is efficient and fast, which greatly shortens the operation time and reduces the operation risk. This will be the development direction of live working. In general, the researches on the working path of UHV live working hanging basket method concentrate on typical working positions [7–9]. The working path is simplified to a straight line, and the calculation data are limited. The data are not enough for optimal path planning. Therefore, all possible positions of the operator in the work area are taken into account, and the safety analysis at each position is performed.
The advent of the information age has brought live working into intelligence. And the path search algorithm, such as ant colony algorithm and particle swarm optimization, is applied to the path selection. Combined with grid models, the local optimal results are accumulated to obtain the global optimal solution. Then the solution is used in path selection to better meet the actual operational requirements of the best path [10,11]. The optimization of the equipotential path for live work is of great significance in the operation and maintenance of UHV transmission lines and smart grids [12].
Considering all possible positions of the operator in the working area, an optimization method for path planning based on ant colony algorithm is proposed to get an efficient and safe working path in this paper. A grid model of the working area is built at first, which is formed by a small square of height h. The two most important parameters are grid data and obstacle grids. The grid data are the maximum value of the electric field strength on the body surface at the calculation node of each grid. The maximum value is calculated by the finite element model of the equipotential operator and the basket. In addition, each grid is judged according to the selection conditions, and the grids that do not meet the conditions are obstacle grids. The setting of obstacle grids is based on the safety distance and complex gaps requirements of live working to ensure that the designed path is compliant with regulations. Secondly, Comparing the grid ant colony algorithm and particle swarm optimization, the number of iterations in the optimal path selection process verifies the rapidity of the grid ant colony algorithm. Finally, the ant colony algorithm is used to plan the path based on the grid model for the purpose of minimizing average value of the electric field intensity on the body surface on the working path. The optimal work path is selected to fit the actual construction safety requirements.
The rest of this paper is organized as follows: In the second part, an introduction to the optimization method of live working path based on grid-ant colony algorithm. And in the third part, a specific calculation method for the grid-ant colony algorithm is given. In the fourth part, it gives the case study. Then the fifth part is the experiment and analysis of path security. At last, the conclusion is demonstrated.
Optimization method for path planning of UHV live working hanging basket method
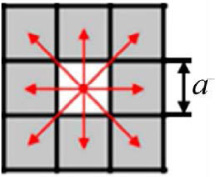
The processes of path planning are roughly divided into three parts. The first part is to establish a grid model. In this part, the working area is divided into a grid of M rows and N columns by a grid of height h [13–15], as shown in Fig. 1. Next, obstacle grids are set according to the safety requirements of UHV live working on Table 1. In addition, grids are also set as obstacle grids in which the electric field strength on the body surface calculated by the finite element method is higher than the air breakdown field strength.
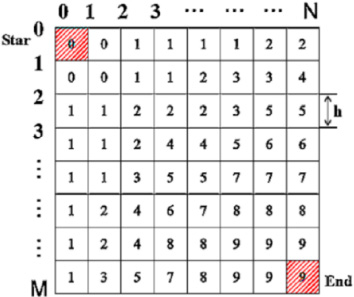
Grid model.
Safety distance for straight tower live working
Note: The values in the table do not include the range of human activities. The range of human activities to be considered in the operation shall not be less than 0.5 m.
The second part is the calculation of the electric field strength on the body surface at the non-obstacle grid nodes by the finite element method. The maximum value of the electric field strength is the grid data at the grid nodes.
The third part is path planning based on ant colony algorithm [14–18]. On the established grid model, the ant colony algorithm is used to obtain the shortest and safest working path. First, let m (m = 1,2, …, N) be the number of ants in the colony, and m ants are scattered randomly on these nodes. Ant m moves to the next node according to the state transition probability formula until the ant has no optional nodes or finds the end point. And the grids that ant m walks through are added into the taboo list. If the ant reaches the end successfully, the ant is marked with ‘1’. Otherwise, it is marked ‘2’ and the initial mark is ‘0’. If m < N, let m = m +1, and repeat the starting operation. If m = N, the iteration is completed, and then all the successful paths of the ants are merged to retain the global optimal path. If the number of iterations k < K, then k = k +1, the taboo list is cleared, and the ant returns to the starting point. Let m = 1 and begin a new search. The path searching ends and the optimal path is derived. The flow of the algorithm is shown in Fig. 2.

Path planning flow chart.
The optimization calculation based on grid ant colony algorithm is composed of grid map modeling, human body surface electric field strength calculation and ant colony path searching.
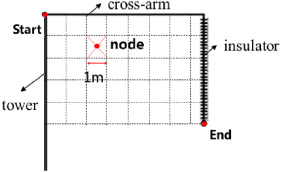
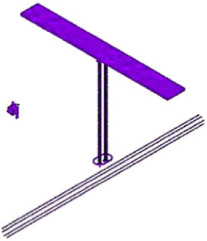
Grid model
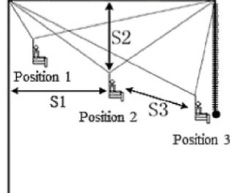
The working area is composed of tower body cross-arm and insulator string as shown in Fig. 3. The intersection of the tower and the cross-arm is set as the starting point, and the horizontal distance between the end point of the optimized path and the wire is 0.6 m. A grid model with a grid height of 1 m is established, where the center of the grid is the calculative node. The complex gaps required in the operating standard is expressed as the minimum value of (S 1 + S 3) or (S 2 + S 3), as shown in Fig. 4. According to the requirements of the complex gaps, the grid nodes in the working area are screened, which also plays a role in reducing the number of computing nodes and improving work efficiency.
Schematic diagram of grid division of work space area.
Live working path.
Where S 1 represents the distance from the operator to the tower (ground potential). S 2 indicates the distance from the operator to the cross-arm (ground potential). S 3 represents the distance from the operator to the conductor or grading ring.
At rated conditions (50 Hz, 1000 kV), the distribution calculation of the electric field intensity on the surface of the operator is performed. During the operation of entering the equipotential, the ground potential operator is responsible for controlling the safety rope.
Because the operation process proceeds slowly, the calculation of the field strength at each intermediate processing position is approximately the calculation of the electrostatic field. In addition, when judging the possibility of corona, the maximum value of the electric field strength on the body surface is usually considered, rather than the cumulative effect over a certain period of time. Therefore, the electrostatic field calculation is used to analyze the electric field strength on the body surface.
For electric field calculation, the calculation model is mainly divided into two parts, including the operator and the transmission line. According to the operating method of the hanging basket method, the operator is supposed to be in the basket with his arms extended to both sides. Then according to the statistical data of Chinese Adults (GB 10000-88), the size standard of operator is obtained. Finally, the human finite element calculation model is established as shown in Fig. 5.
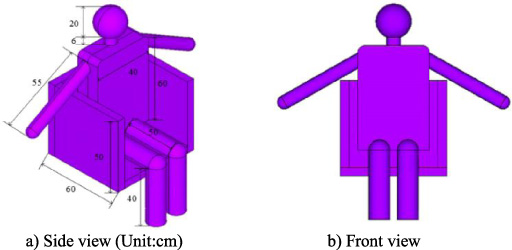
Simulation model of human.
Field strength analysis
According to the parameters of the tower, the finite element model is established, including the cross-arm, insulator and other fittings. The models of operator and tower together constitute the finite element calculation model for calculating the electric field strength on the body surface. By moving the human body model to the position (i, j) (i ∈ M, j ∈ N) in the working area, the effect of simulating is achieved. The electric field strength of the operator’s body at the node (i, j) (i ∈ M, j ∈ N) is calculated by the finite element method. Moreover, the grids with the maximum electric field strength on the body surface exceeding the air breakdown field strength is added to the taboo list.
Path optimization
In each grid, the calculation processes are as follows [15–18],
(1) The value of the grid data which are the maximum electric field strength on the body surface at position (i, j) are defined as Value (i, j).
(2) The serial number of grid S (i, j) is C.
(3) The rectangular coordinates corresponding to the center point (path node) of each grid are defined as (X, Y ).
Movement direction of the ant’s next position.
(4) The ants on each node move through grid nodes in the eight-domain range as shown in Fig. 6. The distance between the center points of two adjacent grids is defined as the distance between grid nodes.
(5) In the process of path searching, the ants choose the position of the next node according to the roulette method. The probability of each node being selected is determined by the pheromone concentration τ
i, s
(t) and the expected value 𝜂
i, j
(t) on the two-point path.
After the path taboo list is set by not satisfying the safety clearance distance and the grid data exceeding the air breakdown field strength, the grid-ant colony algorithm is used to obtain the theoretical optimal path. The fitness function is as formula (7).
(6) The initial value setting of ant colony algorithm includes ant number M and iteration number K. Then, a path search is performed according to Fig. 2, and the optimal solution is explored.
Next section, a case about hanging basket live working path planning on tangent tower is conducted to verify the efficiency and correctness of the optimization method.
Straight tower designation SZ303 is selected in the case study. The models are established and the field strength calculation on the body surface is analyzed for path planning.
Grid model & finite element model
According to the requirements of the grid model and the tower parameters, a grid of 11(M) rows and 12(N) columns in the lower left crossbar operation area is built. The finite element software is used for simulation calculation in the present analysis. The parameters of each component of the tower model include wires, insulators, and grading rings, etc. The exhalation height is 60 m, 8-bundled conducts is LGJ-630/55, the outer diameter of the sub wires is 0.0338 m and the split pitch is 0.4 m. This type of the composite insulators is FXBW-1000/210-9750 with double I-type hang string, the string length is 9 m, distance between the strings is 0.06 m, and the large grading ring is FJ-1000HSZ-600. Due to the large differences in the object size, a part of the tower models on the working side is established to reduce the calculation area. To improve the calculation efficiency, the insulator shed and other internal components are simplified appropriately, which has little effect on the electric field strength. The overall finite element model is shown in Fig. 7.
Body surface field strength analysis and path optimization
Field strength analysis
After the model is established, a cube airspace model is added to control the calculation boundary and reduce the calculation range. At the same time, in order to control the number of mesh divisions, the size of the air domain model is set to be about twice of the overall model. The six faces of the air domain are the calculation boundaries. First, the boundary conditions of the lower surface of the air domain are calculated. Because the distance from the lower cross-arm of the tower SZ303 to the ground is 65 m and the height of the wire to the lower surface of the air domain is 20 m, the lower surface boundary is not zero potential. The phase voltage of the conductor is
Besides, the potential loading of the operator is different from other parts. The operator wearing the shield suit is equivalent to the floating potential of the metal conductor. Therefore, before the operator reaches the equipotential, the coupling potential is loaded on the operator and the basket. When the operator approaches 0.5 meters near the high-voltage side, the equipotential operation is performed. Then, the surface potential loading of the operator is the same as the potential of the charged body.
II-type hang insulator string model.

Finite element triangulation graph.
Figure 8 shows the meshing situation. The number of overall meshes reaches 2,919,325 and the nodes are 4,025,649. And special attention is given to the finite element mesh density at the hands, feet, heads of the human body model and high voltage ends (such as wires, grading rings, etc.), which can improve the accuracy of the finite element calculation results. Furthermore, the rest of the grid is adaptively divided, the side length of the grid is controlled, and the division is relatively sparse, which can reduce the calculation time and improve the calculation efficiency. The finite element model uses the Incomplete Cholesky Conjugate Gradient solver to calculate the electric field on the RAM 64.00 GB & CPU core E5 2.10 computer. The CPU processing time totally is 45 mins.
In the hanging basket method, the calculation results of three typical positions in Fig. 4 are selected for details, which are position 1 (4, 5), position 2 (8, 9) and position 3 (11, 12), and the equipotential is reached at position 3. The cloud maps of field strength on the body surface at the coordinate positions are shown in Fig. 9, and the calculated field strength on the body surface is shown in Tables 2, 3, 4.

Body surface field strength.
The field intensity on body surface
The field intensity on body surface
The field intensity on body surface
Figure 10 is the three-dimensional image, where the X-axis represents the horizontal distance between the spatial point and the set origin, and the Y-axis represents the vertical distance between the spatial point and the set origin. E (x, y) reflects the tendency of the field strength changing with the path position. The peak of the 3D curved surface appears near the equalizing ring and the wire. And when approaching the wire from ground potential through various paths, the curved surface shows a clear upward trend, and the trend also reflects the gradual increase in the field strength on the body surface when the operator enters the equal potential. When the operator approaches the wire, the field strength increases accordingly.

Electric field strength.
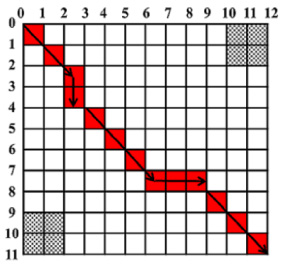
In the Grid-Ant Colony Algorithm, the initial number of ants is set to be 30 and the number of iterations is set to be 150. The optimal solutions are obtained with 𝛼 = 1.303 and 𝛽 = 8.4233. And the optimal objective function value is 48.7 kV/m, and the path length corresponding to the optimal solution is 16.25 m. The schematic diagram of the path on the grid table is shown in Fig. 11, where the area of the gray grid is the prohibited area and the color area with arrows is the resulting optimized path. The algorithm convergence results are shown in Fig. 12(a).
Raster map model.

Path optimization results.
In the Particle Swarm Optimization, the test process is based on the establishment of grid data in the early stage. With the continuous increase of the number of iterations k in the calculation process, the dynamic inertia weight shows a non-linear decrease trend, reduced from 0.9 to 0.4. In the iterative calculation process of T = 600 times, when k = 450, the first optimal path is searched iteratively, and then the local optimal solution continuously jumped out; when k = 500, the optimal path is searched again, and thereafter the fitness value remains unchanged, so it is judged that the output result this time is optimal, and the path length corresponding to the optimal solution is 16.02 m. The convergence result of the algorithm is shown in Fig. 12(b).
According to Fig. 12(a) and Fig. 12(b), it can be seen that, compared with particle swarm optimization, grid ant colony algorithm has fewer iterations and faster speed. The path optimization model in the algorithm not only takes the field strength of each calculation node into consideration, but also considers the length of the live working path. By reasonably setting the parameters of the ant colony optimization algorithm, the shortest path of the global optimization is taken into account while the global optimization is taken into consideration to find the shortest path. The simulation path results are shown in Fig. 13. And when the operator enters the equipotential point according to the movement path, the average field strength on the body surface is the smallest.

Simulation path result graph.
To adapt the optimized path to the actual live working path of guiding live working operations, the path is smoothed, as shown in Fig. 14. According to the grid model, in areas where the new path is inconsistent with the original path, the value of the field strength on the body surface is within the safe range. Therefore, live working operations can be performed feasible along the new path.

Path improvement.
To ensure safety and reliability of the working channel of equipotential operators during UHV live working, power frequency corona discharge test and air-gap operation shock U50 test are required. The tests are carried out in the UHV outdoor test field of the Wuhan Branch of the Chinese Academy of Electric Sciences. The test is designed according to the standard named High Voltage Test Technology (GB/T 16927.1-2011). During the tests, the impulse voltage is loaded at the end of the wire. The test site is built according to the lower cross-arm of the tower. At the site, the height from the conductor to the ground is 17.9 m, the wire is 8 m away from the tower body, the distance between the equalizing rings at both ends of the insulator is 9.37 m, and the equalizing ring distance is 10.08 m from the upper cross-arm. The dummy wrapped with copper sheet simulates an operator wearing a shielding suit.
Power frequency corona discharge test
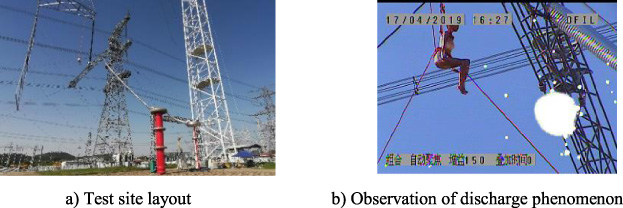
Position (12,11) is selected for the test which is most likely to generate corona discharge. The test site layout is shown in Fig. 15(a). The voltage is boosted by the series resonance device. And the voltage is set to be
Power frequency corona discharge test.
The discharge condition of the 1000 kV live working combination gap is observed by an ultraviolet detector, and the observation results are shown in Fig. 15(b). The white flashing parts are the discharge parts, which are concentrated near the wire clamp hardware. The test sample (dummy model) does not discharge at the power frequency voltage of 640 kV. Therefore, the test product meets the withstand voltage requirements under this test condition. Judging from the test results, the operator wearing shielding suits works on this path is safe.
The typical positions are selected on the optimized path for verification of the operation shock test. According to the test standard, the boost and buck operations are performed 40 times by changing the load voltage. During the test, the voltage is corrected according to the on-site atmospheric conditions. And whether the complex gaps (high voltage side-dummy-tower) breaks down during the test is recorded in the data table to judge the validity of the test voltage data. The layout of the test site is shown in Fig. 16. The insulator string and the split wire are the same as the actual transmission line. The surface of the dummy is wrapped in copper to simulate the operator wearing a shield suit. The test is carried out with the optimized hanging basket method working path shown in Fig. 14. Four typical positions of the path are selected for operating shock discharge test to obtain a 50% discharge voltage U50. The dangerous rate R0 at each position point is calculated based on the U50, and compared with the requirements of GB/T 18037, the dangerous rate of live working should be less than 1.0 × 10−5.

Test site layout.
In the test, the discharge path is high voltage side-dummy-tower, and the operating impulse voltage waveform is an attenuated oscillating wave with a wave front time of 2000 ∼ 3000 μs. The test position points are selected from four typical positions according to the path of Fig. 14, and their coordinates are position 1 (11, 9), position 2 (9, 7), position 3 (6, 7), position 4 (4, 5). The test results are shown in Table 5. The results show that the typical locations in the optimized path meet the requirements of the dangerous rate.
Safety test results of equipotential path for live working
An approach to solve the path planning problem of live working on the Huai-Shang 1000 kV UHV AC transmission line is proposed in this paper. The finite element calculation method is used to obtain the dynamic distribution of the field strength on body surface during the process of the operator entering equipotential. The optimal path of the equipotential in and out of the hanging basket method is designed. At the equipotential position on the path, the field strength on the body surface reaches the maximum value, and the maximum field strength is about 2429 kV/m. The shortest path obtained by the method guarantees the safety of the operator. Combining the theoretical calculation results with the test results, a safe and efficient UHV live working path is obtained, which provided a theoretical basis for the safe and efficient operation of UHV line maintenance.
Footnotes
Acknowledgements
This research was supported by the National Natural Science Foundation of China under Grant (NSFC) (No. 52077048).