
Abstract
Aiming at the irregularity of the fault characteristics of the helicopter main reducer planetary gear, a fault diagnosis method based on support vector data description (SVDD) is proposed. The working condition of the helicopter is complex and changeable, and the fault characteristics of the planetary gear also show irregularity with the change of working conditions. It is impossible to diagnose the fault by the regularity of a single fault feature; so a method of SVDD based on Gaussian kernel function is used. By connecting the energy characteristics and fault characteristics of the helicopter main reducer running state signal and performing vector quantization, the planetary gear of the helicopter main reducer is characterized, and simultaneously couple the multi-channel information, which can accurately characterize the operational state of the planetary gear’s state.
Introduction
Frequent problems and accidents in helicopter using have caused people to pay great attention to helicopter flight safety. The US military found that 68% of helicopter accidents caused by mechanical failures through research, which can be attributed to failures of power plants and transmission systems. Maintenance costs accounts for 58% of total costs [1,2]. As a key component of the helicopter, the transmission system has a huge hidden danger to its safety [3,4]. On the one hand, the structural complexity of the transmission system and the harsh working conditions make it deviate from the ideal operating condition, resulting in failure, and even causing accidents [5–7]. On the other hand, due to structural and technical constraints, the transmission system cannot provide redundant design, so the consequences of serious failure are generally catastrophic [8–10].
Compared with ordinary planetary gearboxes, especially large transmission ratio planetary transmission structures with their own features in environment and working conditions [11], mainly reflected in: A. greater power-to-weight ratio, greater transmission power and reduction ratio, so that In the helicopter planetary transmission structure, the gears and other components bear a greater load [12,13]; B. as the flight state changes, the helicopter planetary transmission structure changes, and the work suffers from the ever-changing high and low cyclic fatigue loads [14,15]; C. helicopter planetary transmission structure bears more complex and harsh climatic conditions, including cold, hot temperature environment, dust, salt spray and mold, etc. [16,17]; D. multi-stage transmission and complex gear trains and other unloading measures, greatly increasing the heat of the flow field in the reducer, and the load affects the service life of the helicopter planetary transmission structural components [18]. In view of the above reasons, the large transmission ratio helicopter planetary transmission structure often has an increased chance of being affected by a larger load, a more complicated structure, a worse use environment, and other random factors [19], and the probability of failure caused by this is greater.
Support vector data description theory
Support vector data description algorithm
The basic idea of SVDD algorithm [20] is to find a minimum hypersphere that can surround the target sample points in the feature space, and let the target sample points be surrounded as much as possible in the hypersphere.
Now given n data
In order to improve the stability and feasibility of the classifier algorithm, a relaxation factor 𝜉
i
≥ 0, i = 1, …, n is now introduced, so Eq. ((1)) can be turned into:
Among them, for each sample data x
i
, there will be a corresponding Lagrange coefficient 𝛼
i
≥ 0 and 𝛾
i
≥ 0, for the Lagrange equation of the above formula, R and a are to get the partial derivative respectively, so that they are equal to 0, then:
In the formulas, a is obtained by a linear combination of x
i
. Substituting 𝛼
i
≥ 0 and 𝛾
i
≥ 0 into ((4)), it can get 0 ≤ 𝛼
i
≤ C, therefore, the optimized Lagrange objective function can be written as follows:
Finding the minimum and optimal solution
For a new sample z, if you want to judge whether it belongs to the target sample or not, you must calculate the generalized distance R
Z
of the sample to the center of the hypersphere firstly.
After
In the above operation, the vector inner product operation is used. The kernel function can be used instead of the inner product to realize the linear problem of transforming the nonlinear problem in low-dimensional space into high-dimensional space. The target optimization function becomes the following form:
In the SVDD classifier algorithm, when a hypersphere is able to correctly classify the training samples, and the program which satisfy the hypersphere is converging at the same time, this condition is called linear separability. Therefore, in the support vector data description algorithm, how to select the kernel function reasonably and accurately becomes very important [21].
The principle of the kernel function is to project the low-dimensional sample data space into the high-dimensional feature space through a nonlinear function φ(x), and perform data classification and other data processing in the high-dimensional feature space:
The expression of Mercer theory is as follows:
Let X be the tight subset of Rn. Suppose K is a continuous symmetric function and X is a compact subset on Rn. If there is an integral operator T
K
: L2(x) → L2(x), making the following formula positive.
f ∈ L2(X) are true. It then expands K (x, z) to a uniformly converged sequence consisting of Tk’s eigenfunctions 𝜙
j
∈ L2(X). Normalized:
Under the condition of satisfying the Mercer theory, any symmetrical function can be called a kernel function. The kernel functions commonly used in engineering algorithms is Polynomial kernel functions:
This formula can be simplified to the form of the polynomial kernel function given in the previous equation. In general, the number of features in a polynomial kernel function can be expressed by the following expression:
The test object is the main reduction planetary gear, as shown in the following figure. There are five planets in the main planetary gear. Each planetary wheel is connected to the rotor shaft wheel through the bearing bear, and transmits the power of the sun gear shaft to the rotor, which also plays the role of deceleration, reducing the high engine speed to the rated speed of the rotor.

Test object.
One of the planetary gears is broken by wire cutting to form a certain degree of grooving, and the planetary gear root crack is simulated. The fault form is as follows:
This test is only for planetary gears. The planetary gears and the sun gear and the inner ring gear are in a uniform horizontal plane. Therefore, six sensors are fixed around the inner ring gear to monitor 3 directions. Every direction has 2 sensors along the ring gear as needed, as shown in the figure.
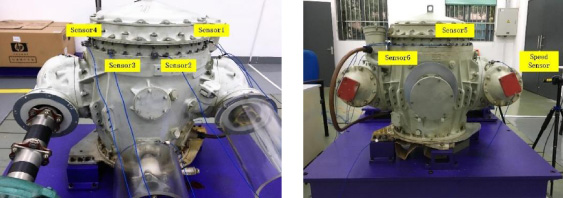
Straight nine main reduction test sensing layout.
The main research object of this test is planetary gears, and the vibration caused by gear or bearing failure has a wide frequency band, so it is determined to use an acceleration sensor as the main method for measuring vibration. At present, the existing acceleration sensor models include 355B03 sensors produced by PCB companies. The technical parameters are shown in Table 1.
Technical indicators of the existing acceleration sensor (ICP)
German IMC SL-4 equipment was used for data acquisition, and its appearance is shown in Fig. 3. In the fault test and the trend test, 7 channels are used, of which 6 vibration channels and 1 speed channel. The sampling rate of each channel is set to 10000 Hz, the sampling time is 600 s under each working condition, and a total of 5 sets of data are collected. As for the specific configuration of IMC, please refer to “IMC SL-4 Data Acquisition Configuration Instructions”.

IMC SL-4 equipment structure outline.
Time domain feature comparison
Taking the NO. 4 sensor as an example, the time domain characteristic RMS value of the signal monitored under different speeds is shown in the figure below.

RMS comparison map.
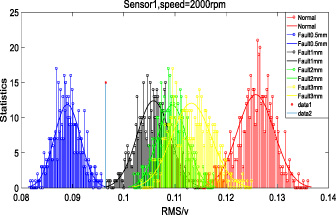
Sensor1 characteristic distribution of different fault levels.
In summary, it can be seen from the figure that the higher the fault degree is, the larger the RMS value is. The RMS value is greater than the RMS value of the fault data; however, the magnitude of the RMS value also has a linear relationship with the degree of fault, that is, a positive correlation or a negative correlation. At the same time, it also shows that the disassembly and installation of the planetary main gearbox of the helicopter main reducer also has a certain influence on the sensing signal. However, by comparing the RMS data of the fault depths of 1 mm, 2 mm, and 3 mm, it is possible to compare the RMS value with the deepening of the fault depth.
By analyzing the input speed of 3000 rpm, the comparison of the local fault doubling data of each planetary wheel of different sensors shows that the 4 times fault frequency has a certain correlation, that is, the larger the fault is, the smaller the 4 times the characteristic frequency is.
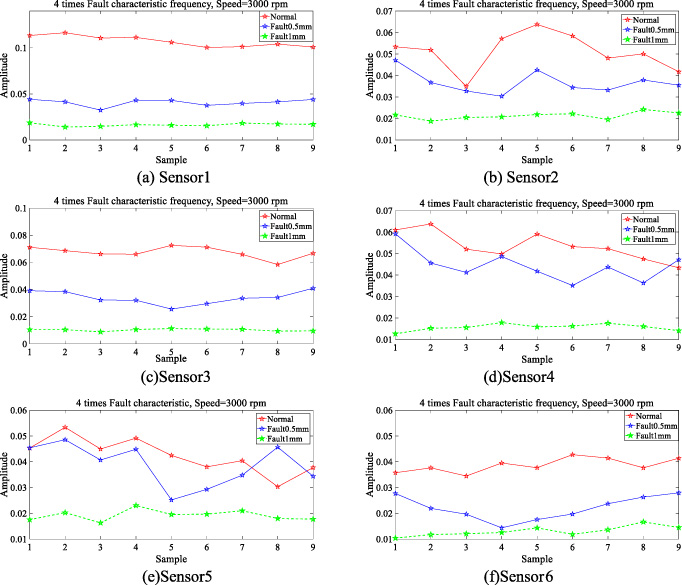
4 times fault characteristic frequency comparison.
In summary, the planetary gear fault characteristics show certain regularity in both the time domain and the frequency domain, but the fault type cannot be characterized by time domain or frequency domain features separately; therefore, the problem is solved by integrating planetary gears’ time domain and frequency domain feature and using the method of support vector data description with Gaussian kernel function.
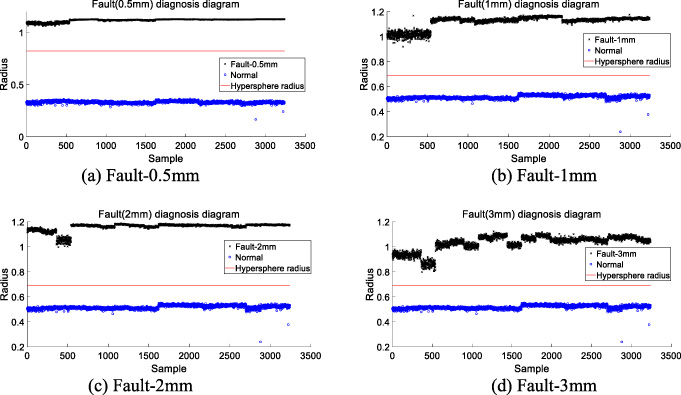
Diagnosis diagram.
The fault state feature representation vector under different operating conditions can be input into the support vector data description model, and the distinction between the normal state and the fault state can be realized.
In this paper, the time-domain characteristics and frequency domain features distribution of the planetary transmission structure are studied by carrying out the progressive failure test of the planetary transmission structure gear of the helicopter main reducer, and the combined characteristics of the time domain and the frequency domain feature are used to characterize the fault characteristics of the planetary gear. Finally, the fault vector identification method for different fault levels is realized by using the support vector data description method with kernel function. However, this paper has certain limitations, that is, the test conditions in this paper cant fully simulate the flight state of the helicopter. Therefore, the follow-up study in this paper will carry out the fault identification work based on the planetary transmission structure under helicopter flight.