
Abstract
To balance the efficiency and accuracy of a global optimization algorithm in solving electromagnetic inverse problems, a Tabu search method assisted by using a Kriging surrogate model is proposed. To reduce the computational time and speed up the algorithm, the Kriging surrogate model is used to predict the objective space. To ensure the accuracy of the final optimal solution, a united trigger is developed to realize dynamically switching between the prediction and the direct objective computation. To utilize the variable space efficiently and provide proper sampling points to update the Kriging surrogate model, an evaluation list is used to evaluate the variable space. A typical mathematical function and electromagnetic inverse problems in low and high frequency are solved to testify the correctness and effectiveness of the proposed method.
Introduction
With widespread use of electromagnetic devices in the modern world, more attentions are focused on the researches of electromagnetic inverse problems. As an essential direction of inverse problem studies, many optimization algorithms are proposed in the past decades. Among these optimization methods, Tabu search methods [1,2] have been considered as a potential candidate in solving practical inverse problem designs for its expansibility and practicality. As a project-faced subject, numerical analysis of electromagnetic inverse problems is always implemented by finite element analysis (FEA) which is considerably time-consuming. Therefore, it is crucial to decrease the convergence time to make Tabu search method more suitable for practical applications. To reach this goal, improved and modified Tabu search methods are proposed. Some representative works are introduced here as [3–5]. A universal Tabu search (UTS) algorithm [3] is proposed for global optimization of multimodal functions with continuous variables in electromagnetic, a transition criterion for different states and a step vector are used to decrease the non-effective calculations. A new Tabu search (NTS) method [4] is presented by enhancing the searching ability of the algorithm around the promising neighborhoods to faster locate the global optimal solution. An efficient Tabu search (ETS) algorithm [5] is introduced for obtaining the robust solutions of inverse problems, Gaussian distributed neighborhood vector and utilization of neighborhood solutions are introduced to avoid excessive computation burdens. All these Tabu search methods have successfully reduced the computational time. However, as the future trending of productions towards to multifunction, the structure of electromagnetic devices is getting more complicated. It is still unendurable time-consuming to optimize an inverse problem. Furthermore, the existing improved Tabu search methods are mainly focused on modifying the procedure and using new mechanisms to increase the convergence speed, which improve the convergence to some extent but still not meet the demands of practical designs.
Kriging surrogate model is a family of methods for minimum error variance estimations. The advantage of a Kriging surrogate model is that it can realize an unbiased estimation at the known sampling points.
Due to its excellent performance in estimating the objective space, the Kriging surrogate model has been incorporated with scalar and vector optimization algorithms in solving the electromagnetic problems [6–10]. These methods can obtain one optimal solution or Pareto front and promote the convergence speed effectively. However, the most of existing methods are working on the modification of the internal process of Kriging or variants of Kriging method, which requires particular knowledge of Kriging from the decision maker. In this regard, a practical project-oriented Kriging assisted Tabu search method is proposed.
Kriging surrogate model assisted Tabu search method
Balancing the exploration and exploitation is critical in the cooperation of Kriging surrogate model and Tabu search methods. To make Kriging surrogate model more efficient in the frame of a Tabu search method, two main mechanisms are proposed.
United trigger
To combine a Kriging surrogate model with optimization method to predict the objective space effectively, the Kriging surrogate model must be updated properly. Due to the unknown objective space, building a precise Kriging surrogate model before the optimization procedures always needs a lot of sampling points, and sometimes it is even impossible. Most of the current Kriging surrogate models applied in optimization methods is updated in the process of the designing cycles. So it is crucial to determine the right timing to update the Kriging surrogate model. If the Kriging surrogate model is updated too frequently, it will drag the convergence speed of the algorithm; on the other hand, if it is updated rarely, the accuracy of the algorithm will be degraded. Therefore, to balance the efficiency and the accuracy of the Tabu optimization algorithm, a united trigger consists of a fixed trigger and a dynamic trigger is proposed to switch the calculation mode of objective function value between Kriging surrogate model and the direct objective function computation based on FEA.
The fixed trigger T f is that when the current best solution estimated using the Kriging surrogate model is better than the global best solution, the current best solution is computed by the direct objective function and the Kriging surrogate model will be updated. The fixed trigger is to guarantee the accuracy of the current global best solution.
The dynamic trigger T
d
is designed to improve the preciseness of the potential area in the objective space and activated every hundreds of iterations, calculated as follows:
One of the main drawbacks of Kriging method is its poor capacity of the resisting disturbance, which means that a Kriging surrogate model is sensitive to the sampling points used to build it and has a poor performance on a disturbance of improper sampling points. However, it is not easy to choose the effective sampling points to update the Kriging surrogate model in the process of an optimization algorithm. If a stochastic sampling method is used in the whole objective space, the accuracy of the current promising areas may not be satisfied; contrarily, if the sampling points are obtained only around the current optimal solutions, it may cause the algorithm being trapped into a local optimal solution and make the algorithm immature. Therefore, an evaluation list is proposed to evaluate the feasible space and indicate the promising areas. The whole feasible space is divided into r sub-domains and each sub-domain is designated a variable reward to evaluate its performance. When new sampling points are needed, a dual championship contest is implemented between sub-domains. The sub-domain with better value of reward is considered as the promising areas to generate new sampling points. For this purpose, parameter r the number of the sub-domain is determined from:
To facilitate the understanding of the proposed algorithm, the details about its iterative procedures are summarized as:
Step 1 Define and initialize the parameters of the optimization problem and the Kriging surrogate model: the number of the design variables n, the number of the sub-domains on one variable m, the number of the sub-domain is computed using (2) the evaluation list of the variable space l, the iteration number i; the initial error value of e0.
Step 2 Generate sampling points using Latin Hypercube Sampling method [12]; calculate and compare the corresponding objective value. Save the initial current global best solution. Compute the reward value of each sub-domain and update the evaluation list l. Use the initial sampling points to build a Kriging surrogate model.
Step 3 Estimate the objective value using Kriging surrogate model, compare and update the current best solution. If the current best solution is better than the global best solution, the fixed trigger T f is activated, the direct objective value is calculated and Kriging surrogate model is improved.
Step 4 If i∕100 is a round number, calculate the average difference e between the predicted and the calculated value of the current individuals. While the e < e0, go to Step 7; else check the dynamic trigger flag T d using (1). If the trigger flag T d is smaller than a random number rand in [0, 1], go to Step 5; else go to Step 6.
Step 5 Generate new sampling points based on the evaluation list l. New individuals are generated from the sub-domain which has larger reward value calculated with (3) in a duality championship contest. Update the Kriging surrogate model.
Step 6 Compute and update the reward value of each sub-domain in the evaluation list l based on (3). Generate new individuals based on the current best solution and the global best solution. Go to Step 3.
Step 7 Stop the algorithm.
Numerical validation
To validate and demonstrate the advantages of the proposed algorithm, it is used to solve a typical mathematical test function [5], electromagnetic inverse benchmark problem-TEAM Workshop Problems 22 [13] and a three dimensional Inverted-F antenna design [14].
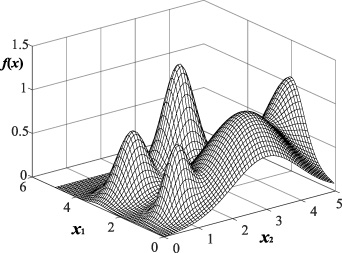
Distribution of the peaks in test function (4).
To testify the global searching ability of the proposed method, a mathematical test function with multiple local optimal traps is used and the formula is as follows:
In the implementation of the proposed algorithm, its parameters are set as: e0 = 10−4, r = 25; the initial parameter of Kriging surrogate model is θ0 = [10 10]. Figure 1 is the distribution of the peaks of the test function. As shown in Fig. 1, the function has 5 optima located in (1,1), (1,3), (3,1), (3,4), (5,2). The corresponding function values are 0.70, 0.75, 1.00, 1.20, 1.00. The characteristic of this test function is its close-by local optimal traps. Table 1 is the comparison among final solutions, global optimal solution f opt and the direct objective calculation among UTS [3], ETS [5] and the proposed method. Obviously, the proposed method can jump out of the local optimal points and converge to the global optimal solution with less iteration.
Comparison among the proposed method, UTS and ETS on solving (4)
TEAM (Testing of Electromagnetic Analysis Method) Workshop Problem 22 is a benchmark problem for testing different optimization algorithms. Problem 22 is superconducting magnetic energy storage (SMES) system for electromagnetic device optimization. The system is consisting of two concentric coils carrying current of opposite direction: inner main solenoid and outer shielding solenoid, which is to reduce the stray field, as shown in Fig. 2. The optimization design of SMES should be satisfied: the energy stored in the device should be 180 MJ; the generated magnetic field inside the solenoids must not violate a certain physical condition which guarantees superconductivity; the mean stray field should be as small as possible.

The coils structure of SMES.
The optimization problem is formalized as:
Comparison among the proposed method ITS and NTS on solving Problems 22
Inverted-F antenna is consisting of a monopole antenna operating parallel to ground plane and grounded at one end, fed from an intermediate facet a distance from the grounded end. Due to its simple structure and easy impedance matching, Inverted-F antenna is widely used in the short distance wireless communication. To evaluate the performance in an electrical system, S-parameter is considered, which demonstrates the input and output relationship between two ports. In an antenna design, S11 is the mostly commonly quoted parameter which represents the power to be reflected from the antenna, known as the reflection coefficient. In this Inverted-F antenna design, the structural parameters are optimized to obtain the minimum value of S11 on the central frequency f c 2.45 GHz. The size of the ground plane is 90 mm × 50 mm with the height 0.8 mm, the width of the antenna is set as 1 mm.

View of an Inverted-F antenna.
The mathematic model of the design problem is:
In numerical studies, the parameters are set as: e0 = 10−4, r = 125, θ0 = [10 10 10]. Table 3 is comparison between the UTS [3] and the proposed method. Figure 4 shows the value of S11 and VSWR obtained by frequency sweeping from 2.05 GHz to 2.85 GHz with a step size 0.05 GHz. Table 3 demonstrates that both UTS and proposed method can provide qualified structural parameters to meet the demand on S11 and VSWR at the central frequency. However, the proposed method uses much less iterations by the assistance of Kriging surrogate model.
Comparison between the proposed method and UTS on solving Inverted F antenna

S11 and VSWR with frequency sweeping from 2.05 GHz to 2.85 GHz.
A Kriging surrogate model assisted Tabu search method is proposed. The results of the mathematical test function and the inverse problems show that the proposed algorithm can find a global optimal solution using less iteration. Surrogate model strategy is an effective way to reduce the time-consuming computational work in the electromagnetic inverse problems, but its usage is still being limited. As for the future work, the authors will continue work on building the surrogate model for high dimensional problems.
Footnotes
Acknowledgements
This work was supported by the Natural Science Foundation, Zhejiang Province under Grant No. LY19E070003, and Natural Science Foundation, China under Grant No. 61701467.