
Abstract
The nonlinear vibration control of the Euler–Bernoulli beam is studied based on capacitive micro-mechanical acoustic sensors The graphene film has the characteristics of high sensitivity and high accuracy which can be applied to sense the vibration signal. Capacitive micro-mechanical acoustic sensors can be used to detect the acoustic signal of the vibration of the nano-beam. The nonlinear vibration control equation of nano-beam can be established with the displacement and velocity voltage feedback controller based on capacitive micro-mechanical acoustic sensors. The amplitude-frequency response equation of the primary resonance of nano-beam can be gotten by using the multiple scales method. The relationship between the nonlinear vibration of nano-beam and system parameters is investigated. The influencing factors of how to weak system nonlinearity and enhance system stability are analyzed. The static bifurcation behavior of the system is discussed. The numerical results show that the nonlinearity of vibration can be reduced and the stability of the system can be improved by selecting the appropriate control gains and appropriately reducing the amplitude of DC and AC excitation voltages.
Introduction
With the rapid development of micro-nano technology, the vibration control of nano-electromechanical systems (NEMS) has become one of the hot research issues. Nano-beams have the characteristics of high natural frequency, high load carrying capacity, high sensitivity and low power consumption, which can be commonly used to make high frequency resonators. However, nonlinear phenomena such as multi-valued and bifurcation are easy to occur in large-amplitude vibrations with the further reduction of the size of the nano-beam. These nonlinear phenomena can cause the unstable vibration of the resonator and ultimately affects the operational stability of the NEMS device. So the nonlinear vibration control of nano-beam has become an important research direction of nano-electromechanical systems. The ordinary sensors are difficult to apply to NEMS devices because NEMS devices are nanometer-sized which commonly are close to or even bigger than NEMS devices using to detect the vibration signal sensors. Therefore, the vibration signal sensing becomes a problem of nonlinear vibration control of nano-beams.
Capacitive micro-mechanical acoustic sensors (CMAS) based on capacitive signal sensing have been attracted the attention of researchers. Mukhiya et al. [1] reported the nonlinear dynamic characteristics of hexagonal capacitive micromachined ultrasonic transducer devices for the first time. The paper demonstrated experimentally the traits of a single hexagonal cell with frequency shift under squeeze film damping phenomenon. Khan et al. [2] proposed an airborne collapse capacitive micromachined ultrasonic transducer as a practical viable ultrasound transducer capable of providing a stable performance at the off-resonance frequencies. Sangjun et al. [3] demonstrated the potential of the developed CMUT with low bias voltage as a key component of a portable chemical sensor system. Engholm et al. [4] introduced the characteristics of two prototype fully integrated 62 +62 row-addressable2-D transducer array probes based on capacitive micromachined ultrasonic transducers and piezoelectric Transducer technology.
In recent years, great progress has been made in the study of nonlinear vibration analysis and control of nano-electromechanical systems. Zhao et al. [5] studied the nonlinear free vibration of nano-beam and obtained the approximate analytical solution of nonlinear equations. Liu et al. [6] used the time-delay feedback control method to obtain the optimal control of the primary resonance of the nano- beam harmonic excitation. Esfahani et al. [7] studied the size-dependent nonlinear vibration of electrostatic excitation nano-beam and established a comprehensive model of two components of intermolecular force and electrostatic excitation. They obtained the natural frequency and the dynamic response of the system through multiple scales method and numerical methods were also verified. Rhoads et al. [8] studied the response characteristics of the amplitude control of AC excitation voltage by proposing a novel nano-beam structure device. Ebrahimi et al. [9] also proposed a model of non-classical beams for nonlinear vibration analysis of magneto-electric-thermal-piezoelectric functional gradient nano-beam in elastic foundations. Najar et al. [10] considered the small-scale effect and studied the dynamic response of nano-beam under nonlinear forces and DC voltages. Khaniki et al. [11] used the Eringen two-phase local/non-local model to dynamically analyze nano-beam embedded in a nonlinear elastic environment. Bornassi et al. [12] used the Euler–Bernoulli beam to establish the equation of motion of nanodevices under electrostatic and intermolecular forces. Acoustic Black Holes, as a new type of passive structure for vibration damping enhancement and noise attenuation, have been drawing increasing attentions of many researchers [13].
In this paper, the nonlinear vibration control of nano-beam based on capacitive micro-mechanical acoustic sensors is studied. The theory of CMAS is applied to the signal extraction of nonlinear vibration of nano-beam, which improves the sensitivity and accuracy of signal extraction. The nonlinear vibration control of nano-beam under electrostatic excitation by using the Euler–Bernoulli beam as the physical model of vibration is analyzed. The nonlinear vibration equation of nano-beam based on capacitive micro-mechanical acoustic sensors is obtained. Then the multiple scales method is applied to obtain the amplitude-frequency response equation of the primary resonance of nano-beam. The relationship between the nonlinear vibration of nano-beam and system parameters is investigated. The influencing factors of weakening system nonlinearity and enhancing system stability are analyzed.
Capacitive micro-mechanical acoustic sensors device
The capacitive micro-mechanical acoustic sensors device is mainly composed of graphene film and electrode. The graphene film can be deformed by receiving acoustic excitation mode for the vibration of nano-beam which can change in the capacitance between the graphene film and electrode plate. In response to graphene film displacement, the output current of CMAS can be expressed as [14]
A cantilever nano-beam is used as a dynamic model. The initial distances between the nano-beam and the drive and control beam are d. At the bottom of the right end of the nano-beam is a capacitive micro-mechanical acoustic sensor which collects the vibration signal of the nano-beam.
The excitation voltage between the nano-beam and the electrostatically driven beam is
The forces between the nano-beam and the drive beam, the nano-beam and the control beam is
For convenience, we introduce the non-dimentional variables
The dynamic equation of the nano-beam is found as
Multiplying Eq. (5) by (1 − u)2(1 + u)2 and introducing the small parameter into Eq. (5), we can get
The approximate solution of Eq. (6) solved by multi-scale method can be written as
Considering the case of the primary resonance of the nano-beam, the external excitation frequency is approximately equal to the natural frequency and the excitation frequency is
Substituting Eq. (7) and its derivative into Eq. (6) and equating coefficients of powers of ϵ, we yield
The general solution of Eq. (9) can be written as
Substituting the general solution Eq. (12) and (13) into (11), the secular terms can be written as
Separating the real and imaginary parts, we get

Schematic diagram of CMUT.
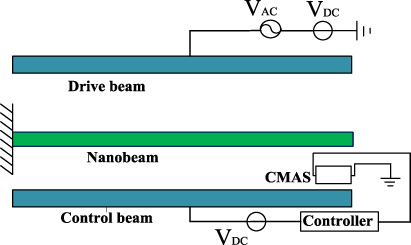
Vibration model of nanobeam.
By Substituting a
′
= 0 and φ
′
= 0 into Eq. (16) and Eq. (17), we can obtain
The amplitude-frequency response equation can be derived as
In this paper, vibration of the Euler–Bernoulli beam is taken as an example. The amplitude-frequency response curve and phase diagram of the nonlinear vibration analysis and control of the system are obtained by using the implicit function calculation program simulation of MATLAB. The vertical axis a represents the amplitude of nano-beam and the horizontal axis σ represents the tuning parameter.
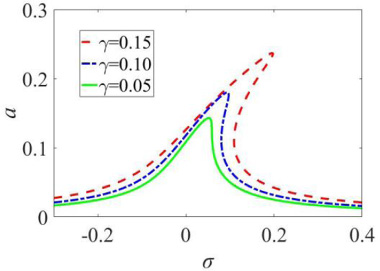
3 shows the influence of damping on the amplitude of the system with μ = 0.04, μ = 0.06, μ = 0.08. The amplitude of the system decreases as the system damping increases. When μ changes from 0.06 to 0.08, the maximum amplitude of the system decreases and the system vibration gradually approaches a steady state from an unstable state. This indicates that saddle-node bifurcation and jump phenomenon can be eliminated by suitable feedback gains. Moreover, the peak amplitude of the primary resonance response for μ = 0.08 is smaller than that for the other two cases.
Curves of the amplitude-frequency with different system damping.

Curves of the amplitude-frequency with different control parameter g1.
The influence of control parameter g1 on the amplitude of the system is shown in Fig. 4 with the case of g1 = 0.1, g1 = 0.3 and g1 = 0.5. There exists an interval in which three solutions exist, and jump phenomenon is presented for g1 = 0.1 and g1 = 0.3. In contrast, for g1 = 0.5, there only exists one solution. Jump and hysteresis phenomena do not exist. This simple example also indicates that the saddle-node bifurcation and jump phenomenon can be eliminated by appropriate selection of the feedback gains.
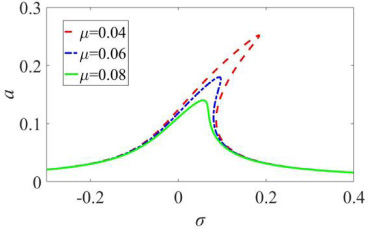
Figure 5 shows the influence of control parameter g2 on the amplitude of the system in case of g2 = 0.01, g2 = 0.03 and g2 = 0.05. The amplitude of the system decreases as the control parameter g2 increases. When g2 = 0.01, the amplitude peak point deviates to the right from the resonance frequency point and the system exhibits nonlinear vibration. When g2 is changed from 0.03 to 0.05, the maximum amplitude of the system decreases and the system vibration gradually becomes stable from an unstable state. Therefore, increasing the control parameter g2 of the system can reduce the nonlinearity of the system vibration. By changing the feedback gains of displacement and velocity, the nonlinear vibration shape of the structure can be changed, and the structural parameters can also be changed to reduce and even eliminate the nonlinear influence on the structure, which means the reduction in vibration of nonlinear structures can be realized. As a result, the nonlinear vibration will be shown as linear vibration.
Curves of the amplitude-frequency with different control parameter g2.
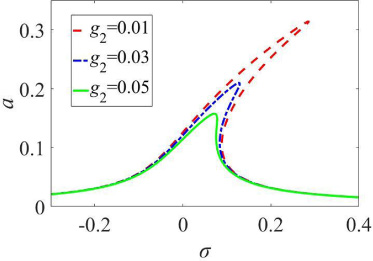
Curves of the amplitude-frequency with different DC voltage parameter 𝛾.
Figure 6 shows the influence of DC voltage parameter 𝛾 on the system in the case of 𝛾 = 0.15, 𝛾 = 0.10 and 𝛾 = 0.05. The amplitude of the system decreases as the DC voltage parameter 𝛾 decreases. When 𝛾 = 0.15, the amplitude peak point deviates to the right from the resonance frequency point and the system exhibits nonlinear vibration. When 𝛾 is changed from 0.10 to 0.05, the maximum amplitude of the system decreases and the system vibration gradually becomes stable from an unstable state. Therefore, reducing the DC voltage parameter 𝛾 of the system can reduce the nonlinearity of the system vibration.
Figure 7 shows the influence of stretching parameter 𝛽 on the system in the case of 𝛽 = 8.0, 𝛽 = 5.5 and 𝛽 = 3.0. The amplitude of the system decreases as the stretching parameter 𝛽 decreases. When 𝛽 = 8.0, the amplitude peak point deviates to the right from the resonance frequency point and the system exhibits nonlinear vibration. When 𝛽 is changed from 5.5 to 3.0, the maximum amplitude of the system decreases and the system vibration gradually becomes stable from an unstable state. Therefore, reducing the stretching parameter 𝛽 of the system can reduce the nonlinearity of the system vibration.
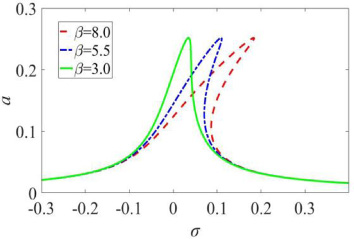
Curves of the amplitude-frequency with different stretching parameter 𝛽.
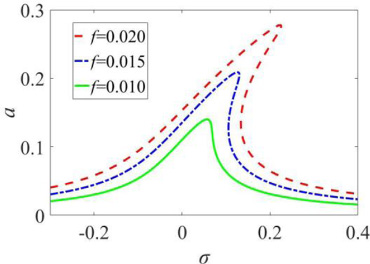
Curves of the amplitude-frequency with different AC voltage parameter f.
The influence of AC voltage parameter f on the system is shown in case of f = 0.020, f = 0.015 and f = 0.010. The amplitude of the system decreases as the AC voltage parameter f decreases. When f = 0.020, the amplitude peak point deviates to the right from the resonance frequency point and the system exhibits nonlinear vibration. When f is changed from 0.015 to 0.010, the maximum amplitude of the system decreases and the system vibration gradually becomes stable from an unstable state. Therefore, decreasing the AC voltage parameter of the system can reduce the nonlinearity of the system vibration.
The theory of CMAS is applied to the signal extraction of nonlinear vibration of nano-beam, which can improve the sensitivity and accuracy of signal extraction. The graphene film can be deformed by receiving acoustic excitation mode for the vibration of nano-beam which can change in the capacitance between the graphene film and the electrode plate.
The system damping, stretching parameter, control parameters, DC and AC voltage parameters are all factors that affect the amplitude of the system. The amplitude of the system can be changed by choosing suitable system parameters.
The nonlinear vibration shape of the structure can be changed by changing the feedback gains of displacement and velocity, and the structural parameters can also be changed to reduce and even eliminate the nonlinear influence on the structure, which means the reduction in vibration of nonlinear structures can be realized. As a result, the nonlinear vibration will be shown as linear vibration by increasing g1 and g2 or reducing 𝛾, 𝛽 and f.