
Abstract
The nonlinearity of the electric vehicle DC charging equipment and the complexity of the charging environment lead to the complex and changeable DC charging signal of the electric vehicle. It is urgent to study the distortion signal recognition method suitable for the electric vehicle DC charging. Focusing on the characteristics of fundamental and ripple in DC charging signal, the Kalman filter algorithm is used to establish the matrix model, and the state variable method is introduced into the filter algorithm to track the parameter state, and the amplitude and phase of the fundamental waves and each secondary ripple are identified; In view of the time-varying characteristics of the unsteady and abrupt signal in the DC charging signal, the stratification and threshold parameters of the wavelet transform are corrected, and a multi-resolution method is established to identify and separate the unsteady and abrupt signals. Identification method of DC charging distortion signal of electric vehicle based on Kalman/modified wavelet transform is used to decompose and identify the signal characteristics of the whole charging process. Experiment results demonstrate that the algorithm can accurately identify ripple, sudden change and unsteady wave during charging. It has higher signal to noise ratio and lower mean root mean square error.
Introduction
Electric vehicle chargers and batteries are high-power non-linear devices, resulting in electric vehicle charging load containing a large number of harmonic (pattern) waves [1], reflecting obvious nonlinearity. In particular, the fast charging mode widely used in charging stations uses high-power DC charging, and dense large-scale centralized charging causes excessive transient load, and often sudden and unsteady signals [2]. And because the DC charging signal is obtained through the rectifier, the nonlinear characteristics are more prominent than the conventional AC charging mode, which has an adverse effect on the accurate measurement of the charging energy of the electric vehicle, the accurate diagnosis of the charging fault, and the prevention of the distortion signal [3].
Aiming at the special environment of DC charging of electric vehicles, it is urgent to carry out research on the identification methods of distortion signals such as ripple, unsteady and sudden change signals. At present, the Fourier algorithm used in this field has the “Gibbs effect” [4], which cannot accurately detect sudden and unsteady signals in the time domain, and under the influence of sudden and unsteady signals, ripple. The decomposition accuracy will also drop significantly. The standard Kalman filter algorithm can accurately identify each ripple, but the noise figure and step size cannot be accurately estimated in advance, and the adaptability is poor. There is a “climbing delay” for the identification of sudden change signals [5]. Wavelet transform can accurately detect unsteady signals, but the ability to identify multiple ripples is insufficient, and cannot be directly applied to the detection of DC charging distortion signals in electric vehicles [6].
According to the characteristics of DC charging signal of electric vehicle, the Kalman filter and wavelet packet transform are modeled and modified, and the relative wavelet packet energy, forgetting factor and variable step size are introduced to optimize the adaptive and convergence speed of signal recognition. Step-size adaptive Kalman corrected wavelet packet for electric vehicle DC charging distortion signal recognition method, to achieve seamless measurement of the whole process of charging. The method can adaptively and accurately identify the fundamental wave in the DC charging signal and the three types of distortion signals of ripple, sudden change and unsteady wave, and has higher signal to noise ratio and lower root mean square error.
Distortion signal characteristics of electric vehicle DC charging process
When the electric vehicle charging system uses high-power DC charging, the voltage/current signal contains multiple ripple components that are integral multiples of the fundamental frequency, and the phase drifts. Figure 1 shows the voltage signal collected by a 500 V constant voltage DC electric vehicle charging station, with a ripple content of up to 2.8%. Due to the randomness of the time-space distribution of the charging behavior of electric vehicles, dense large-scale centralized charging will cause excessive transient load, and the sudden rise (down) signal and high-frequency unsteady signal often appear during the charging process. Figure 2 shows that there is a sharply changing sudden change signal when the charger is started, connected, or mass charged. At the same time, the DC charging voltage signal is decomposed to obtain a typical transient high frequency attenuation signal and a high frequency triangular wave impact signal.
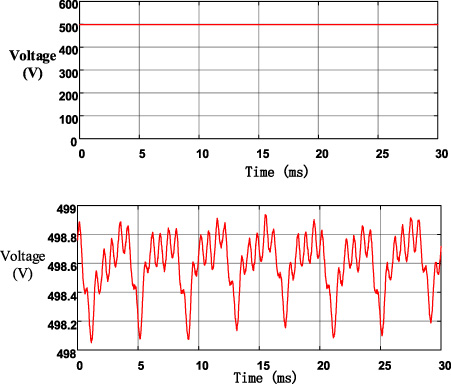
DC charging voltage curve.
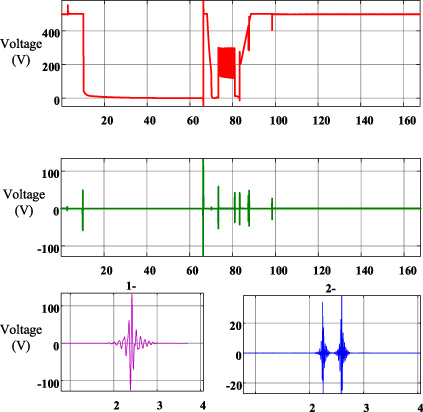
Unsteady signal decomposition.
According to the time-frequency characteristics and wavelet packet energy of the sudden change signal and the unsteady signal in the DC charging load of the electric vehicle, the layering and threshold parameters of the wavelet packet transform are modified, and the local and time-domain transformations and time windows are used. Autonomous adjustment of the frequency window width [7–9], identifying sudden and unsteady signals; after eliminating the influence of the first two types of distortion signals, the variable-step adaptive Kalman filter algorithm is used to establish correlation between fundamental and ripple. The matrix model, through the time-varying noise recursive and predictive estimator [10], corrects the covariance parameters in real time with the input signal, and introduces the forgetting factor to optimize the filtering performance. The fundamental wave and the ripple of the DC charging signal of the electric vehicle. For predictive identification, the variable step size can increase the convergence speed of signal recognition in an unsteady environment.
The signal-to-noise ratio and root mean square error are used as the standard for the accuracy of distortion signal recognition. Through multiple decomposition and comparison verification, db40 is selected as the wavelet basis function, and the layered parameter m0 is adaptively modified by
In wavelet packet multiresolution analysis, a set of wavelet packet functions is obtained at a fixed scale.
The recursive formula of the wavelet packet decomposition coefficient is given by
To avoid the discontinuity of the hard threshold function and the constant deviation of the soft threshold function [12], the threshold function is corrected and denoised.
A sudden change signal appears in the DC charging signal, and the signal characteristics are obtained
The decomposed frequency bands contain different signal components to identify unsteady signals for high-band reconstruction. Refactoring formula is obtained by
A matrix model based on variable step size adaptive Kalman filter algorithm is established to identify the fundamental and ripple signals [13]. The state variable x ∈ R
n
, the state motion equation and the observer are obtained by
x(k) is the n-dimensional state vector of the system. According to the DC charging loadcharacteristics of the electric vehicle, the state vector x(k) can be given by
A(k) is a state transition matrix, and H(k) is an observation matrix. According to the characteristics of the electric vehicle DC charging load signal, the fundamental wave and the first 19 odd-numbered ripples are modeled as
The ripple recognition effect depends on the accuracy of the noise covariance, but in the actual signal recognition, the values of Q(k) and R(k) are difficult to accurately select by known information, which leads to the inaccuracy of recognition. Time-varying noise recursive and predictive estimators.
The existence of the mutated signal leads to the importance of the new data in the recognition process, and the historical data is given a certain weakening [14], and the forgetting factor s needs to be introduced. In order to further improve the tracking effect of the algorithm in the unsteady environment and speed up the convergence, it is necessary to adaptively change the step size, which is realized by the steepest descent algorithm [15].

Voltage signals of the wavelet packet transform decomposition.
The DC charging voltage data of the electric vehicle collected in the field is preprocessed, and the characteristics of various distortion voltage signals are obtained. The charging load modeling and related experiments are carried out to verify the accuracy of the proposed algorithm. In Fig. 3, the curve in the figure shows each voltage signal decomposed by the modified wavelet transform. For complex electric vehicle DC charging signals, the Kalman filter can distinguish the amplitude and phase of the fundamental wave and multiple harmonics accurately, but there will be a certain time “climbing delay” when the signal changes suddenly. Unsteady-state waves cannot be identified.
When the number of ripples is too many, the wavelet transform cannot restore the multiple ripples one by one, but it can accurately identify the transient signals in the unsteady and fundamental waves.
The Fourier algorithm can decompose the ripple component of the DC charging signal in the frequency domain, but cannot accurately decompose the sudden and unsteady signals in the time domain, and the recognition accuracy of each ripple is affected by the distortion signals. There is a large error. The variable-step adaptive Kalman filter algorithm can accurately distinguish the amplitude and phase of the fundamental and multiple ripples. The “climbing delay” when the signal is abrupt is significantly improved compared to the standard Kalman. When the number of ripples is too large, the modified wavelet packet transform cannot restore the multiple ripples one by one, but the unsteady wave and the sudden change signal can be accurately identified. The proposed algorithm can not only accurately identify the sudden and unsteady signals generated during the DC charging process of electric vehicles, but also the accuracy of the identified fundamental wave and each ripple.
Conclusion
For distortion signals, such as ripple, sudden change and unsteady wave, Fourier algorithm cannot accurately decomposes and restores in the time and frequency domain. The variable step size adaptive Kalman filter algorithm based on the amplitude and phase frequency characteristics of the fundamental and ripple in the DC charging signal has higher recognition of the ripple by the adaptive selection of the noise covariance coefficient and the step size. For the time-varying characteristics of the unsteady wave and the sudden change signal in the DC charging signal and the wavelet packet energy, the modified wavelet packet transform of the stratification and threshold parameters can effectively extract the unsteady signal with higher accuracy. Experiments demonstrate that the distortion signal adaptive recognition algorithm based on the characteristics of DC charging signal of electric vehicle combines variable step size adaptive Kalman and modified wavelet packet transform to make up for the defect that Kalman filter algorithm cannot identify unsteady signal and avoid climbing delay generated when the signal is abrupt, improves the accuracy of multiple ripple recognition, and can adaptively and accurately extract the characteristics of the electric vehicle charging distortion signal, and accurately measure and charge the electric vehicle DC charging energy.
Footnotes
Acknowledgements
The project was supported by National Natural Science Foundation of China [51477028], Primary Research & Development Plan of Jiangsu Province [BE2018384].