
Abstract
The reinforcing bar connected by threaded sleeve is widely used. The end contacting status under the sleeve indicates the tightness of the threaded sleeve connection. In this paper, the feasibility of using magnetostrictive guided wave to detect the end contacting status of the reinforcing bar is studied. Firstly, the propagation characteristic of the wave propagating through the threaded sleeve connection is analyzed. The end contacting status affects the reflection and transmission of the wave. Then, experiments are carried out on a thread-sleeve-connected reinforcing bar. The passing signals of the threaded sleeve connection at an exciting frequency of 30 kHz can be used to distinguish end contacting status of the reinforcing bar. Additionally, the peak voltage of the passing signal’s first passing wave decreases with the increasing loosening angle of the threaded sleeve connection. The study proves the feasibility of detecting the end contacting status using magnetostrictive guided wave.
Introduction
The threaded sleeve connection is widely used in the construction industry due to the advantages of high strength, simple operation, fast construction speed, and so on [1]. In practical applications, the threaded sleeve connection must be tightened, otherwise the quality of the tensile structure will be affected. Reinforcing bars are often used in the construction field and one of the connection methods is threaded sleeve connection. However, since the end is covered by the threaded sleeve, the contacting status cannot be directly observed. The guided wave, with its advantages of easy propagation to invisible regions, long propagation distance and high testing efficiency [2–4], has been used for the loosening monitoring of the threaded connection structure. Wu [6] used a modified time reversal method for guided wave to detect the bolt loosening of the lap plate connected by multi-bolt. Yang [7] found that the looser the bolts of the lap plate, the greater the amplitude of the second harmonic of the signal based on some experiments and simulations. Wagle [8] used the average and peak values of the receiving signals to detect the fatigue state of the lap joints. Liang [9,10] used the root mean square deviation of the impedance of receiver to monitor the loosening of the threaded pipe connection. Then he tried another measurement based on the angle difference between the transmitter and the receiver. Korin [11] analyzed the meshing status of the threaded rods by some experiments and determined the crack formation period under different test conditions. Then a thread stiffness estimation method based on the crack size was provided. Compared with the aforementioned threaded connection structure, the threaded sleeve connection of the reinforcing bar has the characteristics of no nut fixing, no shear force and uneven surface of the connected objects. Therefore, the touch sensors are not suitable for the detection of this connection structure. And the method of monitoring the loosening by detecting the nut preload or fatigue is not applicable. However, little research focuses on the detection of this connection structure.
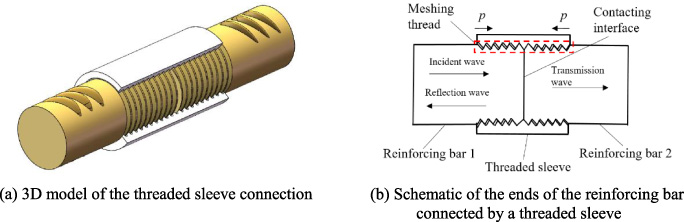
The threaded sleeve connection of the reinforcing bar (p is the external axial squeezing pressure between the meshing thread, which is applied on the reinforcing bars).
Compared with other guided wave technologies, the magnetostrictive guided wave technology has the advantages of large lift-off distance, easy implementation, and no coupling agent requirement [12–14]. Therefore, this technology is suitable to detect the threaded sleeve connection for reinforcing bar with uneven surface and the feasibility is studied in this paper. The propagation characteristics of the wave in the threaded sleeve connection structure is analyzed. The analysis theoretically proves the feasibility of using magnetostrcitive to detect the end contacting status of the reinforcing bar. Experiments are carried out on a threaded-sleeve-connected reinforcing bar to further prove the feasibility. The results show that, under appropriate detecting conditions, it is feasible to use magnetostrictive guided wave to detect the end contacting status of the threaded-sleeve-connected reinforcing bar and to monitor the loosening of the threaded sleeve connection. Even the loosening angle can be measured too.
The threaded sleeve connection of the reinforcing bar is shown in Fig. 1. This structure is consisted of two reinforcing bars and one threaded sleeve. The surfaces of the reinforcing bars are uneven. The rein-forcing bars and the threaded sleeve are connected by the meshing thread. The squeezing pressure exists both the meshing thread and the contacting interface to maintain the balance.
When the incident wave reaches the threaded sleeve connection, transmission and reflection of the wave occur. Because these two reinforcing bars are made of the same elastic materials, for the wave propagating through the contacting interface, the transmission coefficient and the reflection coefficient is given by [15]
Equation (3) indicates that when the exciting frequency is fixed, the transmission coefficient and reflection coefficient are affected by the external applied squeezing pressure. Obviously, the transmission coefficient increases and the reflection coefficient decreases with the increasing of the external applied squeezing pressure. The end contacting status of two connected reinforcing bars is an indication of the tightness of the threaded sleeve connection. When the two ends are in close contact, the contacting force and the external applied squeezing pressure are large and the threaded sleeve connection is in a tightened status. At this time, the transmission coefficient is large and the reflection coefficient is small. When the two ends are contactless or the contacting force is small, the external applied squeezing pressure is zero or tiny and the threaded sleeve connection is in a loosened status. At this time, the transmission coefficient is small and the reflection coefficient is large. Therefore, by detecting the ends contacting status, the loosening of the threaded sleeve connection can be monitored and measured.
On the other hand, for the wave propagating in the meshing thread, large attenuation will occur because the meshing thread can be believed as a kind of large defect. Only the energy with low frequency can propagate through the meshing thread.
The theory analysis shows that, for the wave propagating through the threaded sleeve connection, when the ends of the reinforcing bars are in contact, part of the energy propagate through the contacting interface and the other energy propagate through the meshing thread. When the ends of the reinforcing bars are in contactless, the wave propagates through the meshing thread. For the wave propagating through the contacting interface, the contacting force affects the transmission and the reflection. Only the wave with low frequency can propagate through the meshing thread.
In the experiments, two reinforcing bars with 1000 mm length, 20 mm diameter and 50 mm thread length were selected. These two reinforcing bars were connected by a 50 mm long threaded sleeve. In order to study the feasibility of using magnetostrictive guided wave to detect the connection status of the reinforcing bar, experiments were performed on this connected reinforcing bar.
The experimental platform is shown in Fig. 2. A magnetostrictive guided wave instrument was employed. Both the transmitter and the receiver consisted of two magnetizers and a 50 mm wide solenoid coil. Each magnetizer included a low carbon steel yoke and two NdFeB magnets with grade N52 (30 mm (L) * 10 mm (W) * 20 mm (H)). The exciting signal was a three-cycle sine-wave burst with rectangular window and the peak voltage of the exciting signal was about 200 V. The sampling frequency was 5 MHz. The signal magnification of the instrument was about 2000 times. The pass frequency of the bandpass filter was 1 kHz–300 kHz. In order to reduce the noise, each signal was repeatedly sampled 100 times to obtain the average.
A total of five groups of experiments were carried out on the threaded-sleeve-connected reinforcing bar. During the first four groups of experiments, the transmitter and the receiver were firstly placed on each side of the threaded sleeve. At an exciting frequency of 30 kHz, the receiving signals were obtained when the threaded sleeve connection was completely tightened and loosened (the loosening angle was about 360°) respectively. The exciting frequency was changed to 200 kHz and the second group of expeiments were carried out. Then, the transmitter and the receiver were placed on the same side of the threaded sleeve and the above experimental steps were repeated to carry out the third and forth groups of experiments. The last group of experiments was performed when the transmitter and the receiver were placed on each side of the threaded sleeve and the exciting frequency was 30 kHz. The receiving signals were obtained during the process of loosening the threaded sleeve connection from completely tightening to 45° loosening with a step of 11.25°.
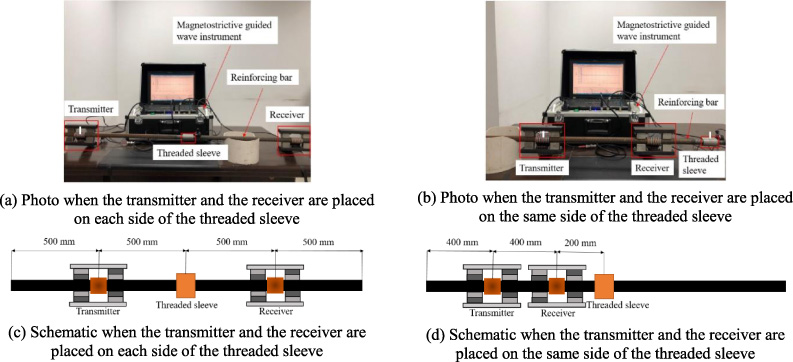
Photos and schematics of the experimental platform.
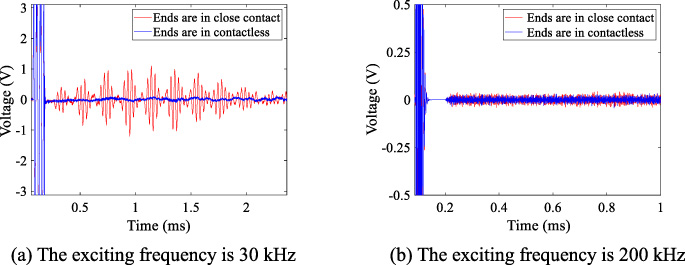
Receiving signals obtained when the transmitter and the receiver are placed on each side of the threaded sleeve.

Receiving signals obtained when the transmitter and the receiver are placed on the same side of the threaded sleeve.
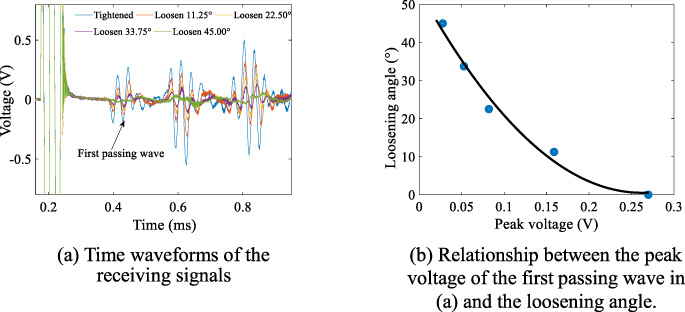
Receiving signals obtained during the process of loosening the threaded sleeve connection with a step of 15° (the transmitter and the receiver are placed on each side of the threaded sleeve and the exciting frequency is 30 kHz).
The experimental results are shown in Figs 3, 4 and 5. The signals in Figs 3 and 4 were obtained when the ends of the reinforcing bars were in close contact or contactless. The signals in Fig. 5 were obtained when the transmitter and the receiver were placed on each side of the threaded sleeve and the exciting frequency was 30 kHz. Each signal corresponds to a loosening angle of the threaded sleeve connection. Compared to the conventional magnetostrictive guided wave signals [18,19], signals in Figs 3, 4 and 5 have more noise because the surface of the reinforcing bar is uneven.
Figure 3 indicates that, when the transmitter and the receiver are placed on each side of the threaded sleeve and the exciting frequency is 30 kHz, the receiving signals can be used to distinguish the end contacting status easily. This is because when the ends are in contactless, the contacting force is small enough, which leads the transmission of the guided wave to trend to zero. At this time, only the energy with low frequency of the guided wave can propagate through the meshing thread of the threaded sleeve connection. The large difference between the signals when the ends are in close contact and contactless means that, when the guided wave propagates through the threaded sleeve connection, most of the energy propagate through the contacting interface if the ends are in contact and the energy propagating through the meshing thread can be ignored. In addition, the amplitude of the receiving signal has a tendency to increase first and then decrease, which is mainly caused by the superposition of the transmission wave and reflection wave. When the exciting frequency is 200 kHz, only small amounts of the guided wave can propagate through the threaded sleeve connection regardless of whether the ends are in close contact or not and the discrimination between the receiving signals is tiny. This is because when the ends are in close contact, the exciting frequency of 200 kHz is too high and the transmission coefficient expressed by Eq. (3) is small. When the ends are in contactless, only the wave with low frequency can propagate through the meshing thread. Besides, the uneven surface of the reinforcing bar has a strong attenuation for the guided wave with high frequency.
Figure 4 indicates that, when the transmitter and the receiver are placed on the same side of the threaded sleeve, the receiving signals have no discrimination of the contacting status whether the exciting frequency is 30 kHz or 200 kHz. For exciting frequency of 30 kHz, this is because there is definitely a reflective surface regardless of whether the ends under the threaded sleeve are in contact or contactless. For exciting frequency of 200 kHz, the reason why the receiving signals have no discrimination is that, the reflection coefficient is always large whether the ends are in contact or contactless due to the high frequency of excitation. At this time, most energy of the guided wave reflects at the threaded sleeve connection regardless of whether the ends are in contact or not. Because the distance between the transmitter and the receiver is small, severe wave superposition occurs on the receiving signals. Additionally, when the exciting frequency is 30 kHz, the receiving signals have a tiny time delay but this delay cannot be used to distinguish the contact status effectively.
Figure 5 shows the relationship between the peak voltage of the receiving signal’s first passing wave and the loosening angle. When the threaded sleeve connection is completely tightened, the peak voltage is about 0.27 V. The peak voltage decreases with the increasing loosening angle. When the loosening angle is up to 45°, the receiving signal only contains the energy with low frequency and the peak voltage drops to about 0.028 V. At this time, the ends under the threaded sleeve are completely contactless and the guided wave propagates through the meshing thread of the threaded sleeve connection. Using these five groups of data, a second-order polynomial is fitted, which is expressed as
The experimental results agree with the theory analysis and show that, when the transmitter and the receiver are placed on each side of the threaded sleeve and the exciting frequency is 30 kHz, the receiving signals can be used to not only for detecting the end contacting status, but also for measurement of the loosening angle of the threaded sleeve connection.
In this paper, the feasibility of detecting the reinforcing bar’s end contacting status using magnetostrictive guided wave is studied and proved. If the ends of the reinforcing bars are in contact, most energy of the magnetostrictive guided wave propagates through the contacting interface. The transmission increases and the reflection decreases with the increasing contacting force. At an exciting frequency is 30 kHz, the passing signal of the threaded sleeve connection can be used to distinguish the contacting status. And the peak voltage of the passing signal’s first passing wave decreases with the increasing loosening angle of the threaded sleeve connection. By detecting the end contacting status, the loosening of the threaded sleeve connection can be monitored and measured effectively and simply.
In the future, we will research the quantitative relationship between the loosening of the threaded sleeve connection and the receiving signal, based on which the instrument will be developed.