
Abstract
With running speed increases, the dynamics characteristic of railway vehicle system behaves intensively, such as, snaking motion, bifurcation problem, even digression accident. These questions effect ride comfort and run stationary. The magneto-rheological (MR) damper can continually change its state in a few milliseconds and has low energy requirement and insensitivity to the temperature and circumstance. MR dampers have turned out to be a promising device in vibration control. According to the nonlinear of MR damper and the vibration characteristic of semi-active suspension of high-speed vehicle, a seventeen-degree-of-freedom lateral semi-control model of high-speed whole vehicle with MR dampers is established. Taking into account of the vibrations of vehicle and electromagnetic interference, a novel adaptive fuzzy control strategy is put forward. The simulation results show that adaptive fuzzy control method can improve the ride comfort and restrain electromagnetic interference. The electromagnetic interference noise problems in high-speed railway vehicle system with MRD are analyzed and discussed according to EN 55022 for the first time.
Introduction
With many advantages such as strong transportation capacities, high speed and low freight, high-speed vehicle system has caused worldwide concern. As running speed increases, vehicle vibration intensifies, and riding quality becomes worse. The ability of fast and effective control is a key factor to select vibration damper. Magneto-rheological (MR) fluid, as a new smart material, is reversible adjustable and low energy consumption. MR damper is a semi-active control device that uses MR fluids to produce controllable damping force. Many scholars have studied the application of MR dampers. H.D. analyzed semi-active H∞ control method of MR damper in vehicle suspension system [1]. Yang has established lateral semi-active vibration control strategy in high-speed vehicle system with MR dampers [2]. L. Lei took MR damper as actuator to reduce the vertical acceleration of the body [3,4]. These studies mainly focus on vibration control strategy and non-linear dynamics analysis. Few scholars have considered the electromagnetic effect of MR dampers in vehicle system.
The damping force of MR damper can be adjusted step-less in a few milliseconds. It is suitable for real-time control. But the electromagnetic noise can’t be ignored [5,6]. In the second part, the dynamic model of high-speed vehicle with MR dampers is introduced. In the third part, an adaptive fuzzy control method considering electromagnetic noise is introduced. The fourth part analyzes the influence of the control method on the vibration control and dynamic characteristics of the vehicle. The suppression effect of electromagnetic noise is analyzed. The fifth part gives a summary.
Dynamic model of high speed vehicle based on MR damper
Fundamentally, the lateral vibration of vehicles is caused by random rail irregularities. The lateral random excitation is transmitted to the vehicle system through wheel-rail contact. Taking a B0-B0 vehicle with four axes as the research object, MR dampers are installed between the bogies and the body respectively. The body, bogies and wheel-sets are supposed to be rigid. The parts are connected by primary or secondary suspension to form a mass-spring-damper system. Considering the lateral and yaw of wheel-set, the roll, lateral and yaw of front and rear bogies and body, the lateral dynamic model of 17 DOF high speed vehicle based on MR damper is established [7]. It is shown in Fig. 1.

Dynamic model of high speed vehicle based on MR dampers.
According to the theory of dynamics, the motion equations of vehicle components are obtained. The lateral dynamic differential equation of the whole vehicle is obtained as follows:
In the above formula, M is the mass coefficient matrix. C and K are matrices of basic damping and stiffness. The q is the input vector of track irregularity. B is the parameter matrix of MR damper under semi-active control strategy. It depends on the structure of the vehicle. F is the vector of control force generated by MR dampers. Considering the influence of time delay caused by acquisition system, the vector F can be expressed as follow:
The revised cubic Bouc-Wen model is adopted [8]. The damping force of MR damper is the sum of viscous force and hysteretic damping force, which can be expressed as follows. In formulas, parameter z is a hysteretic displacement. The parameters 𝛼 are hysteretic displacement coefficients. A and 𝛼 are functions of excitation current I loaded on MR damper.
The parameters c0, 𝛾 and 𝛽 are constant for the fixed MRF and damper. The values of three parameters are obtained by experiments. The hysteretic relationship between the velocity and the damping force of the MR damper with the time-delay of the high-speed vehicle system is analyzed. It is shown in Fig. 2.
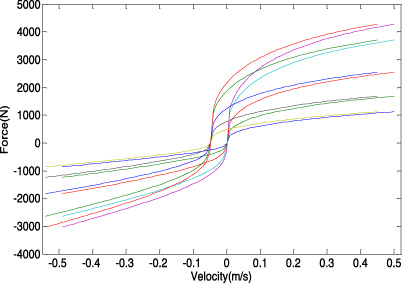
The relationship between velocity and damping force.
The hysteretic relationship between the displacement and the damping force of the MR damper with the time-delay of the high-speed vehicle system is analyzed. The relational surface is shown in Fig. 3. The excitation currents from inside to outside are 0, 0.5, 1, 1.5 and 2 A, respectively. It can be seen from the figures that the damping characteristics of MR dampers have non-linear hysteretic characteristics.
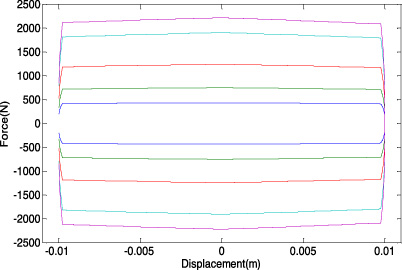
The relationship between displacement and damper force.
The semi-active suspension system based on MR damper is a time-varying and non-linear system. The classical control theory doesn’t work very well in practice. In view of the strong non-linearity of MR damper, some researchers have put forward sky-hook and on/off control strategy. These control methods are simple and practical. But they can’t be well controlled in real time, and can’t make full use of the advantages of MR damper such as fast response and reversible adjust-ability. Machine learning and deep learning control models have been proposed. It works well in theory. But the model which is too complex and needs a long training time is not suitable for the real-time system. Fuzzy control is constructed according to practical experience, which is simple, effective and easy to realize. According to the character of suspension system and considering the problem of electromagnetic noise suppression of MR damper, an adaptive fuzzy control method is proposed.
The lateral vibration acceleration of vehicle body and bogie directly reflect the lateral vibration trend of high-speed vehicle. The vehicle’s lateral acceleration A and the bogie’s lateral acceleration A1 are selected as the input variables of the fuzzy controller, and the output variables are the input current I of the MR damper. Vehicle body acceleration, bogie acceleration and MR damper input are discredited into five grades. The grade values are Min, S, M, B and Max. Bell function is used for membership functions of input and output variables, and Mamdani reasoning method is used for fuzzy reasoning. Aiming at “the acceleration of the vehicle body is zero”, a fuzzy rule is established. The semi-active suspension control rules are summarized as shown in Table 1.
Library of fuzzy rules
Library of fuzzy rules
The input current directly affects the vibration control effect. So, it plays an important role in the safety of vehicle system. But, the current can causes electromagnetic noise. If the suppression of electromagnetic noise is considered at the same time as the vibration control, the fuzzy control model must be adjusted. Because high-frequency harmonic of the current may cause the electromagnetic interference (EMI), which may do harm to other electric control unit [6]. Therefore, we must optimize the input current. EMI has relationship with the rising edge of current. In order to reduce the rising edge of current and smooth current curve, an adaptive fuzzy control strategy is designed to achieve the effect of reducing the electromagnetic noise [9,10]. According to the change rate of input current obtained by the fuzzy controller, the input current of MR damper is modified as follows:
I (n) is the input current value of MR damper obtained by fuzzy control rules, I (n −1) is the actual input current value of MR damper at the last control time, and I is the revised input current value. The interval of control time is Δt. If the amplitude of the rising or falling edge of the control current exceeds milliseconds, it indicates that the current rising edge is too steep in the current state, which is not conducive to noise suppression, and should be reduced to smooth the current change.
In order to verify the validity of adaptive fuzzy control method, Matlab software is used to simulate. In the simulation, the track irregularity adopts the sixth level track spectrum of the United States. The triangular series method is used to simulate the time-domain characteristics of the track random irregularity. The New-Mark compensation method is used to solve the equation. When designing the simulation system, in order to approach the actual system as close as possible, considering the time lag of the control module and MR damper, the input delay of the system is set at 0.5 Ms. In order to analyze and compare the effects of simple fuzzy control and adaptive fuzzy control method, a 17-DOF lateral simple fuzzy control model based on MR damper was established. According to EN 55022, the conducted EMI noise of the MR control system is derived as followed.
The simulation results under different vibration control strategies are compared in the figures.
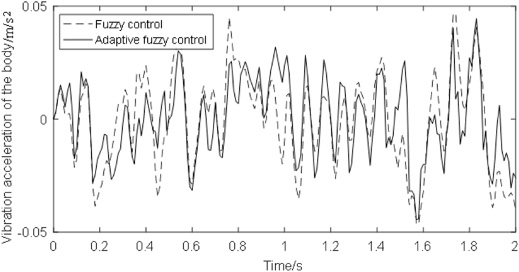
Time domain response under different vibration control strategies.
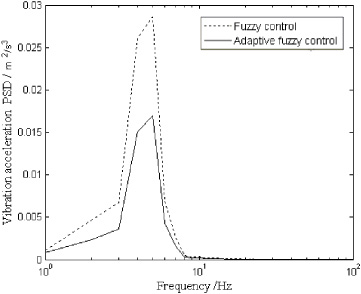
Frequency domain response under different vibration control strategies.
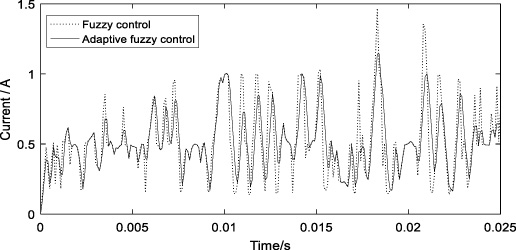
Current under different control strategies.
Form the Figure 4, it is seen that suspension travel response in the vibration amplitude is reduced very effectively using adaptive control method which can lower lateral acceleration and control the snaking motion. From the simulation results, it can be seen that the adaptive fuzzy control method provides improved performances compared with simple fuzzy control method. From the Figure 5, it can be seen that the frequency range is reduced very effectively, especially in the domains of 5 ∼8 Hz which are sensitive to the human body. From Fig. 6, the control current of MR damper is smoothed and the rising edge of current is reduced by adaptive fuzzy control method. As can be seen from Fig. 7, the EMI noise of MR damper can be restrained to a certain extent by adaptive fuzzy control under smoother control current. By adjusting the input current of MR damper, the conduction electromagnetic noise can be reduced.

EMI noise under Different control strategies.
On the basis of analyzing the dynamic and electromagnetic characteristics of MR damper, a lateral dynamic model of high-speed vehicle based on MR damper is established. In order to reduce and smooth the input current of MR damper, an adaptive fuzzy control strategy is proposed, which combines the fuzzy control in intelligent control and the influencing factors of MR damper noise. Through simulation analysis, the dynamic and electromagnetic noise characteristics of high-speed vehicles under adaptive control strategy are studied. The results show that the conductive electromagnetic noise of MR damper can be restrained to a certain extent when the vibration control effect of vehicles is not affected.
Footnotes
Acknowledgements
This research was financially supported by the National Natural Science Foundation of China (11790282 and 11372197) and the Natural Science Foundation of Hebei Province (E2014210078).