The formulation for the azimuthal component of the magnetic vector potential for axisymmetric magnetostatic applications is well known. However for transient magnetic fields with solid source conductors and eddy currents the formulation has to be revised. A variable transformation is introduced to remove the singularity from the numerical scheme. The numerical error cannot accumulate and is put instead to the postprocessing at every time step.
Axisymmetric models for transient magnetic field simulations play an important role in many electromagnetic applications, for example, magnetic actuators. Exploiting the axial symmetry the problem can be stated as a 2D Finite Element problem in the rz-plane. Here, solid conductors which can carry eddy currents have a prescribed total current while the distribution of the current density is unknown. The current density is composed of the eddy current density and the source current density which is derived from a constant but unknown electric potential. Formulations for axisymmetric models are known, but without the current constraint for solid conductors [1]. First we present the formulation for transient magnetic fields with current constraint for models with infinite length (xy-geometry). Then we derive the formulation for axisymmetric models (rz-geometry) and show that the integration order for the numerical scheme is important to prevent the solver from diverging. Finally, a suitable variable transformation is introduced to increase the stability.
Transient magnetic formulation
Transient magnetic formulation in 3D
The transient magnetic field equation in 3 dimensions can be written as the parabolic differential equation for the magnetic vector potential A. From the nonphysical quantity A all physical relevant quantities can be calculated. Equation (1) can be derived from the basic Maxwell equations, material relations and neglecting displacement currents ∂D∕∂t which is common in low frequency applications. The material property is given by the magnetic reluctivity 𝜈, the conductors conductivity by σ and 𝜙 the electric scalar potential. Equation (1) is well known and has been investigated by many authors in the past decades. Older publications deal with the derivation of this equations (see [4,5,7,9]). More recent publications deal with solving this equation with various time stepping methods for specific applications as motors and generators (see [2,3,8,10]).
If the problem geometry reveals axial symmetry the problem can be considered as planar solution. Next sections will explain the numerical problems arising from this approach and how to avoid that problem.
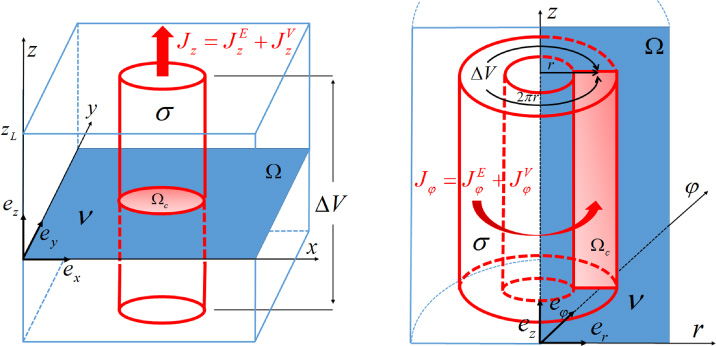
Solid conductor in xy-geometry (left), rz-geometry (right).
Transient magnetic formulation for solid source conductors in 2D
Infinite conductors – XY -geometry
If the model is extended infinite in one direction and the currents only flow in that direction the 3D model can be represented by a 2D model. Solid source conductors for xy-geometries are discussed in [6]. We refer to that model as xy-geometry. Even no real application reveals infinite extension in one direction many problems can be well approximated by a 2D model as motors and generators. Figure 1 (left) shows a simplified model with one conductor which is extended infinite in z-direction. It can be shown that the magnetic vector potential A = (0,0, Az)T only has only one nonzero component Az. The gradient of the electric scalar potential 𝜙 comes from a voltage drop ΔV which implies an electric field ΔV∕ΔL with ΔL the length of the voltage drop. It is common to use ΔL = 1 m and (1) can be written as or From (3) it can be seen that the overall current density J = (0,0, Jz)T has only a component Jz in z-direction and consists of the eddy current density and the current density which comes from the voltage drop along the conductor such that .
The voltage drop ΔV is usually unknown. Instead the overall current I is known. Hence (3) is augmented by the current constraint equation and the equations have to be solved for the unknowns Az and ΔV .
Axisymmetric coils – RZ-geometry
If the model shows symmetry with respect to one axis and the currents flow in coils around in azimuthal direction the problem can stated as a 2D problem. Applications like magnetic valves show this symmetry. Figure 1 (right) shows a simplified model with one solid coil. The current J = (0, Jφ,0)T only has a component in φ-direction. It can be shown that the magnetic vector potential A = (0, Aφ,0)T has only a nonzero component Aφ in φ-direction. The constant voltage drop ΔV along the circle with radius r yields the electric field ΔV∕(2πr) and (1) can be written with the additional current constraint equation using cylindrical coordinates as The unknowns are Aφ and ΔV . The overall current density Jφ consists of the eddy current density and the current density which comes from the constant voltage drop ΔV such that .
Finite element discretization
Discretization for XY -geometry
The continuous scalar magnetic potential Az is discretized with classical Lagrangian interpolatory shape functions of any order on a triangular mesh. Let n denote the number of unknowns (dof’s) and Ni = Ni(x, y), i = 1, …, n the shape functions. The weak formulation of (2) and (3) with and a: = (a1, …, an)T yields with the mass element matrix Me and the stiffness element matrix Ke The vacuum permeability is denoted by μ0 and μ = μ0μr,𝜈r = 1∕μr. The matrices M and K are assembled from the element matrices Me and Ke by looping over all elements of the mesh respecting the local to global relation of the dof’s. The integrals in the first rows of (7) and (8) are surface integrals d𝛺S = dx dy over the conductor domain 𝛺c and in the second row of (7) and (8) are volume integrals d𝛺V = dx dy dz over the cuboid with bottom area 𝛺 and height zL − z0. It is common to set z0 = 0 m, zL = 1 m and hence the mass and stiffness element matrix are The integration domain in the second rows of (9) is the 2D domain 𝛺. The curl of (0,0, Ni)T is given by where ex, ey and ez denote the unit vectors in the cartesian coordinate system. Applying standard time integration methods with step size Δt to (6) as implicit Runge–Kutta methods a linear system with coefficient matrix M∕Δt + K can be derived. After rescaling this matrix can be made symmetric which is suitable for linear solvers. Once the unknowns a and ΔV are known in every time step the magnetic flux density can be derived as
Discretization for RZ-geometry
The weak formulation of (5) which is obtained by multiplying the first equation of (5) with a suitable test function and integrating over the cylinder volume (Fig. 1, right: blue cylinder) is to be discretized with , Ni = Ni(r, z) and a: = (a1, …, an)T and the test function Nj = Nj(r, z) results in The element matrices Me and Ke are with d𝛺S = dr dz and d𝛺V = 2πr dr dz. The evaluation of Ke is critical since the curl of Nieφ can be written and contains a singularity at r = 0. It is obvious that this could be the source of numerical problems.
Variable transformation
The singularity in ((14)) can be removed by using the variable transformation The (4,4)-entry is transformed as Hence (15) no longer contains the singularity. However its has not been removed completely. At every time step the back transformation has to be done for calculating the magnetic flux density B: = curlA. But the singularity has been removed from the time stepping scheme such that errors cannot accumulate over the time.
Wave transformer
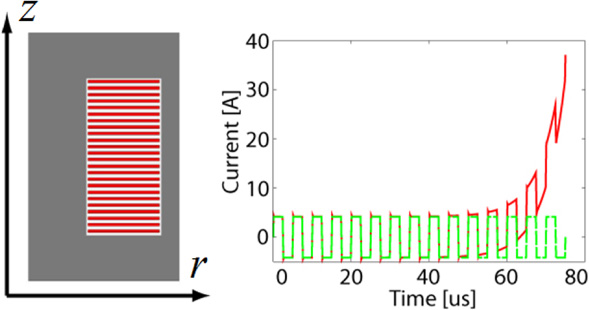
In Fig. 2 the rz-geometry of a cylindrical wave transformer with several conductors in an iron core is shown. In one conductor, which is the source conductor, the current I is prescribed as a rectangular signal which is shown in Fig. 2 as green dashed curve and can be recalculated from according to (17). Figure 2 (right) shows the source current which is calculated by (17) and using implicit Euler for the time stepping. The solid red curve is obtained from the standard formulas ((12)) and ((13)) containing the singularity and the green curve shows the curve using the variable transformation. Of course, the problems arising from the singularity might not be dominant in other examples and no variable transformation might be needed. However this example should show that divergence could happen and how to avoid it.
Wave transformer in rz-geometry (left), current curves (right).
Conclusion
The numerical solution of the transient magnetic field equation which is solved with 2D finite elements for axisymmetric models can become instable due to a singularity. Small errors which are made when evaluating the stiffness matrix accumulate over the time and causes the solver to diverge. A variable transformation removes that singularity and puts it instead to the in each time step postprocessing.
References
1.
AscheG. and SattlerPh.K., Numerical calculation of the dynamic behaviour of electromagnetic actuators, IEEE Transactions on Magnetics26(2) (1990), 979–982.
2.
ClemensM.LangJ.TeleagaD. and WimmerG., Transient 3D magnetic field simulations with combined space and time mesh adaptivity for lowest order whitney finite element formulations, IET Science, Measurement and Technology3(6) (2009), 377–383.
3.
ClemensM.WilkeM. and WeilandT., Linear-implicit time integration schemes for error-controlled transient nonlinear magnetic field simulations, IEEE Transactions on Magnetics39(3) (2003), 1175–1178.
4.
EmsonC.R.I. and SimkinJ., An optimal method for 3-D eddy currents, IEEE Transactions on Magnetics19(6) (1983), 2450–2452.
5.
EmsonC.R.I. and TrowbridgeC.W., Transient 3D eddy currents using modified magnetic vector potentials and magnetic scalar potentials, IEEE Transactions on Magnetics24(1) (1988), 86–89.
6.
FuW.N.ZhouP.LinD.StantonS. and CendesZ.J., Modeling of solid conductors in two-dimensional transient finite-element analysis and its application to electric machines, IEEE Transactions on Magnetics40(2) (2004), 426–434.
7.
KonradA. and SilvesterP., Triangular finite elements for the generalized bessel equation of order m, International Journal for Numerical Methods in Engineering7 (1973), 43–55.
8.
LiH.L.HoS.L. and FuW.N., Application of multi-stage diagonally-implicit Runge–Kutta algorithm to transient magnetic field computation using finite element method, IEEE Transactions on Magnetics48(2) (2012), 279–282.
9.
WeissJ. and CendesZ., Efficient finite element solution of multipath eddy current problems, IEEE Transactions on Magnetics18(6) (1982), 1710–1712.
10.
WimmerG.SteinmetzT. and ClemensM., Reuse, recycle, reduce (3R) - strategies for the calculation of transient magnetic fields, Applied Numerical Mathematics59 (2009), 830–844.