
Abstract
The purpose of this paper is to optimize the topology of the rotor head in a Salient Pole Synchronous Generator to maximize the magnetic flux in the stator yoke and in the air gap. The generator is modelled using FE method, and the ON-OFF method is used to manage the optimization domain. Genetic Algorithm is used to find the optimal solution for the problem. The resulting topology and convergence graphs are also presented, and the results are discussed.
Introduction
Topology optimization (TO) is an alternative method to find the optimal shape of a device for a specific purpose without any layout a priori. Highly inspired from the structural/mechanical community which has been actively working on this method since the late 60s, it represents a growing interest in the electromagnetic community for the design of electrical machines [1–3]. The methods used are essentially based on and further evolved from existing TO ones: Homogenization Method [4], Density Method [5], ON-OFF Method [6], or Level-Set Method [7]. Various works using these methods can be found in literature [8–10]. The latter are principally used to model the design space /domain to be optimized. The underlying modelling method used for the former three are generally Finite Element Modelling. Additionally, an optimization algorithm is used to achieve the best shape for the formulated problem; this can be chosen more freely amongst the wide range of existing algorithms. The most popular ones are gradient-based algorithms such as Sequential Quadratic Programming (SQP), stochastic methods such as Genetic Algorithm (GA), Particle Swarm Optimization (PSO), and so on.
In this study, the aim is to optimize the rotor head shape of a Salient Pole Synchronous Generator (SPSG) used for electricity generation in wind turbines. The objective is to maximize the magnetic flux in the stator yoke and in the air gap to reach the optimal design. This paper is more application oriented where an existing prototype is used, as opposed to its counterpart papers that usually focus on developing methodologies for TO. Nevertheless, a concise description of the methodology used will also be included in this paper. The ON/OFF method is used in this study to work with a stochastic algorithm: Genetic Algorithm [11] is chosen here for its global optimum. Finite Element Method (FEM) is used to model the optimization domain, and solved with code_Carmel, a laboratory calculation code. The Genetic Algorithm is also run through the homemade optimization platform Sophemis. Both code_Carmel and Sophemis are coupled.
In the first section of this paper, the FE model of the SPSG is introduced, and the characteristics of the machine are given. The FE model used for topology optimization is also presented to clearly identify the optimization domain and its characteristics. In the following section, the methodology is elaborated, focusing on how the ON-OFF method and GA work together. The numerical tools are also encompassed, explaining how they are coupled to process the solution and deliver the results. Consequently, the optimization results for the rotor head topology are presented, and their various aspects in terms of improvement of model, convergence of algorithm and meeting the specifications are discussed.
The salient pole synchronous generator model
The SPSG model used is designed for electricity production in wind turbines, and has a rated power of 1 MVA [12]. Figure 1 illustrates the labelled Finite Element (FE) model of one pole (out of eight) of the machine, and Table 1 gives some additional information.
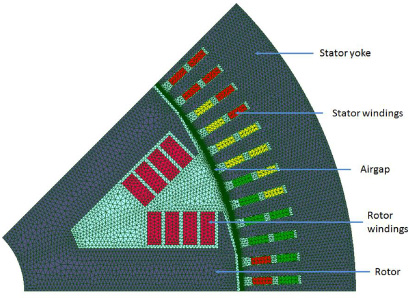
Salient pole synchronous generator model.
Usually, the shape of the rotor is designed to yield a sinusoidal magnetic flux density in the air gap, and therefore a sinusoidal electromotive force while the stator windings are conceived to reduce the space harmonics caused by the stator. Hence, the aim is to find an optimal shape of the rotor pole head that maximizes the magnetic flux in the stator yoke and the flux density in the air gap. The model will be run in magnetostatic at no load, i.e. only the rotor windings will be supplied with current and not the stator; and the model is run for one time step.
Additional parameter information of SPSG
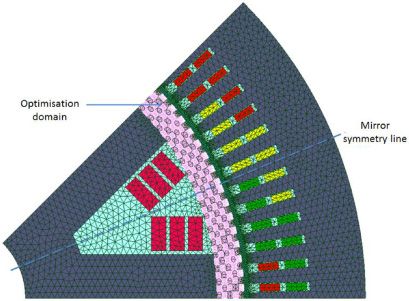
The optimization domain is depicted in Fig. 2 as the magenta area. It is discretized into 160 sub-domains or quadrilateral zones where each can take the magnetic characteristics of either iron or air. There are 32 quadrilateral zones along the azimuthal direction adjacent to the airgap, and 5 layers of zones in the radial direction; making up the 160 zones in total. In the optimization problem, each zone represents a variable, and hence 160 variables. Each variable can either get the iron or air characteristic after optimization. The nonlinear behavior of the ferromagnetic materials is also taken into account during computation of the FE model for more consistent results [13].
TO is generally a very time-consuming process, and therefore effort must be done while formulating the problem to make it as lean as possible. For this reason, the number of variables can be halved by taking into account the pole symmetry, as in Fig. 2. This reduces the number of variables to 80, and therefore anything below the symmetry line will be mirrored above it. The FE mesh is independent of the number of variables in the optimization problem, hence allowing a coarse or fine mesh without compromising the resulting topology.
TO model of SPSG initial model.
The numerical tools, being an essential part of TO work, is elaborated in this section. As previously mentioned, code_Camel and Sophemis are used as FE calculation code and optimization platform respectively. Both are coupled numerically and the workflow is described.
As for the methodology, the use of Genetic Algorithm with the ON-OFF Method as used in this paper will be explained here. The use of an algorithm to reduce the checkerboard patterns in such problems will also be explained here; the Poulsen Scheme [14].
Numerical tools
The numerical tools code_Carmel [15] and Sophemis [16] are both homemade codes. code_Carmel is a calculation package that can solve an electromagnetic FE problem for a magnetic scalar or vector potential. It operates in a Linux environment, and is only intended for local use at the moment. On the other hand, Sophemis is an optimization platform that harbors various algorithms such as SQP, Genetic Algorithm, PSO, Full Factorial, Latin Hypercube Sampling, and so on. It provides a GUI that allows the user to easily choose between these various algorithms to solve an optimization problem.
Throughout the course of this work, it was required to couple both FE and optimization codes to create a working loop that carries out TO. The loop is iterated n times until the optimal topology is obtained. Figure 3 depicts the workflow for the TO process using the above described tools.
The initial FE model (Fig. 2) is fed to the coupled tools, and the FE problem is solved a first time. Depending on the optimization algorithm used, the values of the variables are changed within the prescribed range and the FE model with the new values is solved as many times as required by the TO problem until an optimum solution is reached. Note that ‘Salome 7’, the logo adjacent to the Initial Model block is a free software used for FE modelling and meshing.
Calculation times can range from a couple of minutes to several days depending on the problem definition and parameterization. Models with nonlinear materials take more time than linear ones, and more so when using a high number of optimization variables, or when the model is finely meshed.
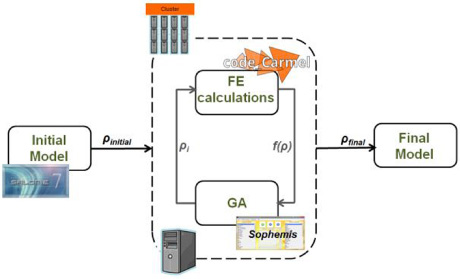
Numerical tools code_Carmel & Sophemis in TO process.
This section elaborates on the different algorithms used in the methodology. The method used to discretize the optimization domain is ON-OFF, and the algorithm used to solve the optimization problem is GA. The Poulsen Scheme is used to inhibit any checkerboard structures from arising.
The ON-OFF method
The ON-OFF method require the optimization domain to be discretized into smaller zones, as depicted by the purple region in Fig. 2. Each zone can either take the magnetic characteristic of one material or the other; for instance iron or air in the present case. A binary number 1 or 0 is used to represent each material, whereby it will also represent the variables of the optimization problem, denoted as 𝜌
i
, where
Based on the previous works, evolutionary algorithms remain the most popular optimization algorithms used with the ON/OFF method. Genetic Algorithms (GA) are often used, whether directly or coupled with some local search procedures. The main advantage of these approaches is that the global optimum is more likely to be found, as compared to using gradient-based algorithms. Nonetheless, a higher number of generations/evaluations are generally needed, and this can increase the calculation time to a higher extent. GA will therefore be used in this work.
On the other hand, the ON-OFF method often yields checkerboard structures. This is characterized by alternate regions of material 1 and 2, or material 1 completely surrounded by material 2, or vice-versa. This problem can nevertheless be overcome with the use of filters or smoothing operators during optimization [17]. The filter used in this study is discussed next.
Poulsen Scheme
The ON-OFF method often generates checkerboard structures [18] when it uses a discrete algorithm. Checkerboards, by their random 0/1 pattern often hinder optimal solutions, and can produce solutions that meet the algorithm specifications, but are incoherent in topology due to their non-feasibility. To counteract this issue, the Poulsen Scheme [14] is used, which checks for checkerboard patches throughout the TO process in the whole TO design. In a 2D design, it checks every group of 4 zones, as in Fig. 4, showing the homogeneous degree h of the patch. The latter can also be written as in ((1)). The monotonicity of the patch is given by m as in ((2)), where a, b, c and d are the density values in the elements surrounding node n. It is usual that the density function 𝜌 is not quasi monotonic around the node. Here we say that 𝜌 is quasi monotonic at the node n if and only if each small circle around the node n can be split in two half circles such that 𝜌 restricted to one of the semi circles is monotonic. The homogeneous function H for the whole design is given in ((3)).

Homogeneous degree (h).
Various TO studies in literature do not take into account the nonlinear behavior of the ferromagnetic materials used. This often biases the results producing topologies that are physically incoherent [13]. Therefore, in this study we consider the B-H curve of iron as given in Fig. 5. The Marrocco function [19] (4) is used to model the B-H curve of the magnetic material, with the following coefficients used:
While solving the magnetostatic problem with the nonlinear materials, their magnetic permeability are gradually updated so that the correct magnetic flux density and saturation points are obtained for the model.

B-H curve used for iron.
This section presents in detail the optimized topology obtained which maximizes the magnetic flux in the yoke and in the air gap. The problem formulated is explained in the first part of the section, and the results are discussed. The latter are also compared to the initial SPSG.
Optimization problem formulation
FE analysis in this study is performed using magnetic scalar potential formulation.
As mentioned earlier, it is desired to maximize the magnetic flux in the stator yoke and the amplitude of the first harmonic of the magnetic flux density (B) in the air gap. The fifth harmonic will be minimized, but not the third harmonic, as it is a 3 phase machine. To achieve this, 5 reference points are taken in the yoke where the magnetic flux density is maximized, and 101 points in the air gap to reconstruct the magnetic flux density and hence deduce the FFT; Fig. 6 zooms into the relevant area. The optimization problem is formulated in ((5)), also accounting for the Poulsen Scheme. The first term Byoke accounts for the 5 points in the yoke, the second and third terms h1 and h5 respectively represent the hamonics 1 and 5 of the magnetic flux density in the airgap, and the last term Poulsen accounts for the Poulsen coefficient which helps eliminate the checkerboards in the final topology. The values 𝛼, 𝛽, 𝜆 and 𝛾 are weight coefficients that help keep all the above objectives within the same order of values. The values of 𝜆 and 𝛾 are chosen as 10 so that the range of values for the 5th harmonic and Poulsen are consistent with those of the magnetic flux density in the yoke and 1st harmonic. This tweaking helps all the objective functions in the sum to be given the same importance during optimization. Optimization in general, especially TO, can yield correct results from an algorithm point of view, but incoherent in terms of physical feasibility.

Zoom to show points where magnetic flux density is taken.
The resulting topology is given in Fig. 7(a) and the magnetic flux density distribution in (b). The number of evaluations completed by GA is 10503, but optimal solutions appear before the end of the process. The optimal point chosen here is obtained at the 10 433th evaluation.
The topology obtained for the rotor head is quite similar to a conventional one, with the gap between the two poles being large enough to prevent leakage flux from pole to pole, and maximize flux through the stator. A tapered shape was found for the rotor head, maximizing the first harmonic and minimizing the fifth harmonic.
Table 1 compares the values of the magnetic flux density (B) in the yoke and in the air gap for the initial machine and optimized the machine.
The value of B measured in the yoke is slightly higher for the optimized machine; 1.09 T as compared to 1.03 T in the initial one. This occurs despite a slightly lower first harmonic in the air gap of the optimal model at 0.8143 T, as compared to the initial model at 0.822 T. On the other hand, the fifth harmonic is reduced by a factor of 5.8 in the optimized machine. The third harmonic is 6.4 times higher in the optimized model as it was not minimized in this case. This is because we have a three phase machine and in any case, the 3rd harmonic will be eliminated in the phase to phase voltage.
Figure 7(c) shows the magnetic flux density evolution in the air gap w.r.t the angle, and compares it to a pure sinusoidal curve with the same amplitude as the first harmonic.
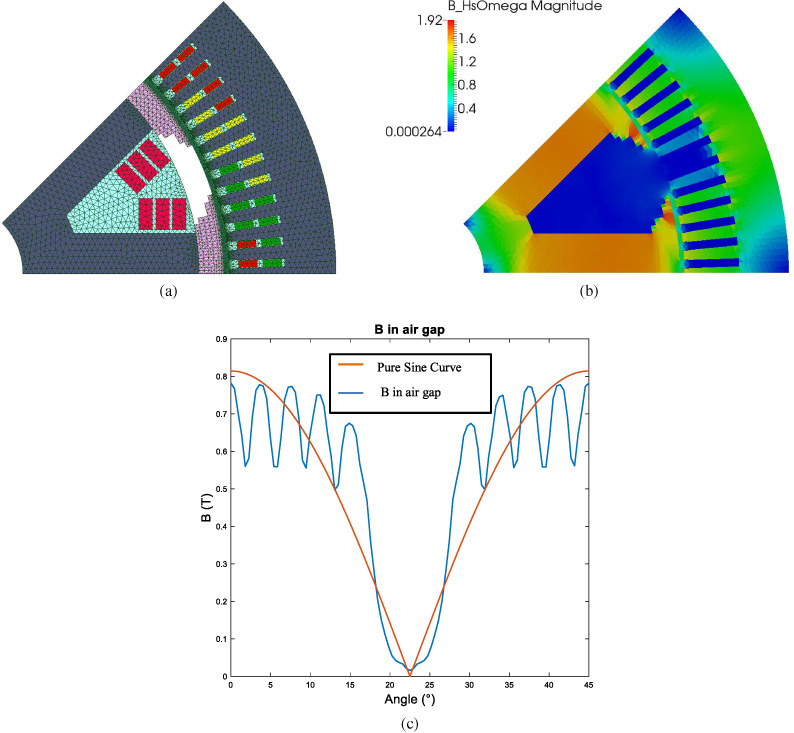
(a) Resulting topology, (b) B distribution, (c) B in gap.
Magnetic flux density B(T) comparison
Figure 8 illustrates the convergence of the algorithm to the optimal solution. It respectively gives the evolution of the magnetic flux density in the yoke, the first harmonic h1, the evolution of Poulsen and the fifth harmonic h5. We notice a slow but steady convergence of the magnetic flux density in the yoke to a maximum value, where in the meantime, the first harmonic of B in the air gap also increases to a maximum. The fifth harmonic decreases to a minimum as well. As for the Poulsen Scheme, it shows a decrease from a topology with a relatively high amount of checkerboard to one with none (Poulsen = 0).
Note that the values of B in the yoke range from 1 to 6 as the sum of all the 5 values are used. On the other hand, the values for Poulsen usually range from 0 to 0.3, or slightly higher depending on the model. Here, the values did not go beyond 0.3. The values in Fig. 8 for Poulsen and h5 have been divided by the values of 𝜆 and 𝛾 used.
The solutions meet the defined optimization problem specifications, as per the evolution of the objective functions. The rotor head shape obtained is familiar with what is encountered in literature for this type of electrical machine, with an optimized flux in the stator.

Convergence for each objective function.
This paper has studied the topology optimization of a rotor pole head in a salient pole machine, using the ON/OFF method with Genetic Algorithm. The approach to tackle the process has been described, as well as the numerical tools used to model and optimize the machine. The optimized rotor head shape obtained complied with what was sought in the optimization problem definition. With a progressive shoe-type structure obtained at the end of the rotor poles, leaving a large air gap between the latter, the flux from the rotor to the stator satisfies what is required in an electrical machine. The value of the flux density in the yoke of the optimized machine is also slightly higher than in the original one. As for the flux density in the air gap, its 5th harmonic is reduced by 5.8 times in the optimized model. These results show that topology optimization can be a good engineering tool to improve existing structures of electrical machines, with a well-adapted problem formulation to each case.