
Abstract
To solve the complex calculation in the reliability evaluation of the motor system with the Markov model, this study developed a reliability evaluation method based on the hidden Markov model (HMM). Next, the developed method was employed in a type of permanent magnet hybrid segmented flux-switching machine (PMFSM). By analyzing and simplifying the components of the PMFSM system, the reliability measurement standard and the failure modes of the respective component were examined, and the relationships between the failure modes of each component and the system parameters were built. The optimal parameter observation sequence was determined by calculating the Minkowski distance, and the HMM was iteratively calculated by using the Baum–Welch algorithm. Moreover, the state transition probability matrix of the system was built, and the system reliability was evaluated. As revealed from the calculation results, the reliability of the PMFSM system is significantly higher than that of the conventional structure at the same time, and the mean time to failure (MTTF) of the PMFSM system is 14.8% higher than that of the conventional structure. Compared with the conventional evaluation method based on the Markov model, the two methods have similar reliability results for conventional and novel PMFSM systems, and the variation trend is the same. It shows that the proposed reliability evaluation method is feasible and effective, and the calculation is simple. The work in this study provides a basis for the design of the novel PMFSM system, and a practical engineering method to efficiently evaluate the reliability of other motor systems.
Keywords
Introduction
Over the past few years, as power electronics technology and permanent magnet materials are leaping forward [1], the performance of numerous motors has been improved. Permanent magnet motors have been extensively employed in automobile, aerospace and other fields for their high power density and efficiency, high reliability and stable running performance. The PMFSM refers to a doubly salient permanent magnet motor, with permanent magnet located on the stator and rotor without permanent magnet and winding. It exhibits a high torque density and a high efficiency, and it has aroused the attention from many scholars worldwide, thereby leading to the proposition of numerous new control topologies and motor structures of the PMFSM [2–14]. The reliable and stable operation ability of the new motor system is the main problem facing the equipment, which is directly related to the safety of the system. For this reason, the reliability evaluation of the motor system is of high significance.
For the newly proposed control topology and motor structure, the performance improvement can usually be verified through simulations or experiments. However, its reliability is difficult to be verified efficiently, and the verification requires considerable reliability experiments. Accordingly, the investigation of a rapid reliability evaluation method of motor systems has become a research hotspot. Some scholars proposed to use the statistical data of motor fault combined with the algorithm to efficiently evaluate the reliability of motor systems. Li et al. [15] proposed a method to quantitatively evaluate the reliability of the permanent magnet motor system based on the Markov model. They studied the effect of the motor phase number, the stator core structure and the mixed excitation on the reliability of the motor system. Moreover, they experimentally verified the failure mode. Bazzi et al. [16] proposed a Markov reliability model of induction motor under field-oriented control. To be specific, they analyzed the potential failure modes of the motor system, introduced the faults into the model in sequence, evaluated the system performance after each fault. On that basis, they studied the probability of normal operation of the system under fault occurrence. Xu et al. [17] proposed a reliability evaluation scheme of the switched reluctance motor system based on the Markov model. They optimally selected a control strategy by evaluating the reliability of three control algorithms, and they developed several measures to enhance the reliability of the motor system by increasing the redundancy of components. Chen et al. [18] investigated the reliability prediction method of the switched reluctance motor system. Given the system control strategy and the component fault classification, the reliability model for the system was built with the reliability block diagram and the Markov chain, and the performance of the system after the failure was experimentally verified. As indicated from the results, the Markov chain could more effectively indicate the effect of the control algorithm on the system reliability. As revealed from the mentioned literature, the Markov chain has been extensively employed in the reliability evaluation of motor systems. However, it is the probability algorithm based on the Markov process, and the failure mode of the first system should be cleared. The transfer probability of all variables was calculated under the fault condition to build a Markov state transition probability matrix for the reliability evaluation. As impacted by the considerable components in the motor system, the transition probability is complicated to be calculated, thereby impeding the application of the reliability evaluation of the motor system in engineering.
To address the problems in the mentioned literature, a motor system reliability evaluation method by integrating the Hidden Markov model and the iterative algorithm was proposed in this study. Such a method was applied to a mixed segment PMFSM with permanent magnets. The hidden Markov model is not required to calculate the transition probability by complying with the fault situation, whereas it should only construct the parameter observation sequence. Subsequently, the parameter observation sequence was substituted into the Hidden Markov model, and the iterative algorithm was adopted to calculate the transition probability matrix of the reliability evaluation state. The mentioned method significantly simplified the calculation, and it could act as a practical engineering method to efficiently evaluate the reliability of the motor system. The proposed evaluation method was adopted to analyze and verify the reliability of the mixed segment PMFSM with permanent magnets, and then the results were compared with those of the conventional Markov evaluation method. As indicated from the results, the calculated values of the two methods were similar, showing the same change trend, which proved the proposed reliability evaluation method to be effective. Furthermore, compared with the conventional PMFSM, the reliability of the novel PMFSM was significantly improved after the improvement of the motor structure, which could underpin the design of the novel motor system and be referenced for the reliability evaluation of other motor systems.
Methods for reliability evaluation of PMFSM systems
Hidden Markov model
Consistent with Markov process, Hidden Markov process is an extension of Markov process and a random process following Markov hypothesis, which assumes that each state only depends on the previous state [19,20]. The state of HMM cannot be directly observed, but its state distribution can be inferred from the observed values. It describes the probability distribution between states and between states and observed quantities. This point can be used to study the reliability of the motor system. Since only the state of parameters such as motor current and torque can be found and the specific fault category cannot be observed, there is an internal connection between the state of fault and the observed current and torque, etc. Therefore, the HMM combined with the Baum–Welch algorithm is used in this study to calculate the reliability of the system.
The state transition probability matrix A describes the transition probabilities among various states in the HMM. A ij = P (A t+1 = S j |A t = S i ),1 ≤ i, j ≤ N represents the probability that the state at time t +1 is S j , given that the state at time t is S i .
The observation probability matrix
For the HMM, system failure is the process of system state change that is from normal state to minor failure, and finally to the state of system failure. S is used to represent the state space of system faults
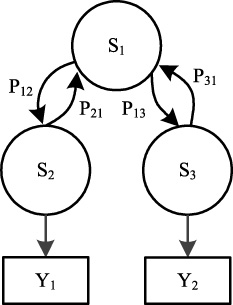
Simple HMM topology.
Therefore, the state transition probability matrix
It is assumed that each implicit system state is related to the observed values of M characteristic parameters. In general, it is necessary to carry out quantitative processing on a large number of characteristic parameters collected by experiments to obtain the observation sequence at time t as
Subsequently, the observation probability matrix
In this study, the HMM model is used to evaluate the reliability of motor system. The motor system model in this study includes the control module based on DSP, the power inverter module, the motor body, the position acquisition module based on the rotary transformer, the voltage and current detection module and the drive protection module, etc. The block diagram of the module is shown in Fig. 2.
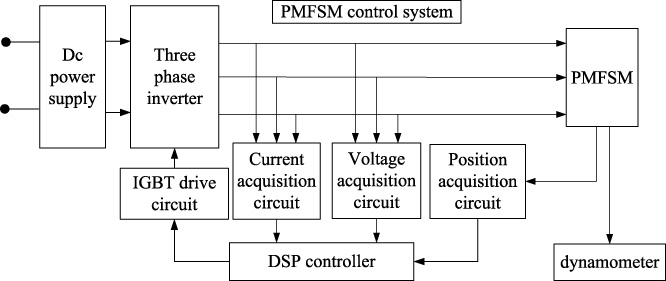
Block diagram of PMFSM system model.
Some assumptions are made to establish the reliability model of the system. For electrical components and electromechanical equipment, the reliability of the parts basically follows the exponential distribution, so the reliability of the components in the PMFSM system follows the exponential distribution in this study. Complex model is not conducive to evaluation, so the system model is simplified. The reliability of the control module is not calculated in this study because it uses components with high reliability and contains protection circuits. The inverter module is simplified into IGBT and DC bus capacitance. The motor body is simplified as winding and permanent magnet. Other parts are simplified as Hall current sensor and speed sensor. There are 6 components in total. The reliability of each component can be simplified to an exponential distribution with only a single parameter failure rate, and the components are independent of each other. If any component fails, the system will fail. Therefore, the system conforms to the characteristics of series system, and the overall reliability of the system is also exponential distribution. 𝜆1 ∼𝜆6 are the failure rates of IGBT, Hall current sensor, speed sensor, DC bus capacitance, winding and permanent magnet respectively.
After the time t, the reliability of each component is still assumed to follow the same distribution, independent of t, and contains only the unique parameter 𝜆. Therefore, the reliability function of each component of the system is expressed as:
In the premise of not considering the protection module and other parts, but only considering the necessary components of the PMFSM system operation, any part failure will inevitably lead to the PMFSM system failure. Such a system is a typical series system. When all the components of the series system satisfy the exponential distribution, the failure rate of the system is the sum of the failure rates of the components, which can be expressed as:
R
s
(t) is the reliability function of the system, namely, that is the product of reliability of each part in the system:
The mean time to failure (MTTF) of the PMFSM system is expressed as:
To calculate the system reliability, it is essential to determine the system reliability measurement standard. According to reference [16], ±50 rpm of the given speed is selected as the speed parameter measurement standard, that is, the motor speed deviation is above ±50 rpm to determine the fault system; the torque fluctuation of 10% is selected as the measurement standard of torque parameters, that is, if the motor output torque fluctuation is more than 10%, the system fault is determined. The current parameters are determined according to the standard of 1.2 times the normal current under the operating state, and the response time should be less than 250 ms. The measurement standard is shown in Table 1.
Measurement standard of system reliability
Measurement standard of system reliability
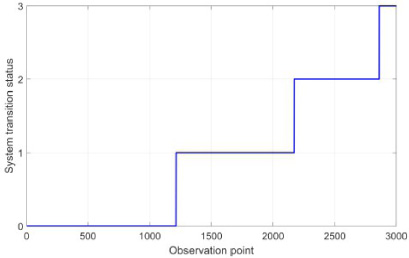
According to the operation requirements of the system, the failure state of the motor system is divided into four states according to the failure mode of the system: normal, slight fault, serious fault and system failure, and the failure standard of the system operation is determined and quantified to generate the parameter observation sequence of the hidden Markov model, which is called the observation sequence. In order to simplify the prediction model, this study only selects four reliability measurement standards and four types of failure modes for analysis. Increasing the number of evaluation standards and failure mode classifications can further improve the credibility and accuracy of the evaluation.
The observation sequence of the system
PMFSM system state transition diagram.
The probability of failure state transition of the PMFSM system is calculated according to failure rate and performance parameter evaluation. P 0 is the probability of normal state, P 1 is the probability of slight fault state, and P 2 is the probability of serious fault state, and P 3 is the probability of system failure. The component failure rate in this study is a small probability event. According to Murphy’s Law, when enough samples are taken, the small probability event will become possible. The failure probability of this study is tested by Matlab, which proves the feasibility of generating parameter observation sequence.
Minkowski distance refers to the gap based on comprehensive analysis of distance and direction of the vector. The curve of the parameter observation series in this study can be considered as the directed line segment starting from the origin. Some large values of the Minkowski distance of each curve are eliminated to simulate the fault occurrence and simplify the data acquisition process. Subsequently, the Minkowski distance formula is used to solve the Minkowski distance between each observation sequence [21]. Outliers are eliminated and the curve with the minimum sum of Minkowski distances is taken as the final observation sequence
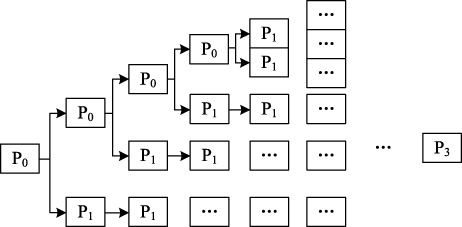
When calculating the observation sequence of any parameter, the system is normal at time t 0, then the observation quantity is 0, and the state of slight failure of the system at the next moment is 1. The probability of failure of each component is concluded and calculated, and so on, until the system reaches the failure state 3. The observation sequence is generated repeatedly and the Minkowski distance is solved by using the above algorithm. The optimal solution is taken as the observation sequence of this parameter.
The initial system is in normal operation state, the probability distribution vector of the initial state is
Given 𝜌 = (
According to the Chepman–Kolmogoroff differential equation:
The initial system is in normal state, then:
Substitute the matrix A at t into (11), the following equation can be obtained:
By taking the inverse Laplace transform of Eq. (12), the probabilities of different states of the system at the time t can be obtained as follows:
Then there is the reliability of the system R s (t) =1 − P (k+1)(t) at time t. According to the above evaluation calculation method, the reliability evaluation calculation of PMFSM system designed in this study is carried out. The calculation is shown in Fig. 4.
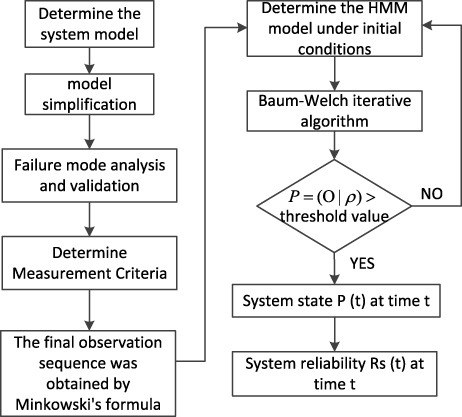
Calculation flow chart.
Failure mode
The simplified failure of each key component in this study will have an impact on the system. The fault forms of each component are shown in Table 2. For winding, due to the influence of motor heat dissipation, there are inter-turn short circuit, phase to phase short circuit and winding open circuit, which will cause the failure of motor system. The IGBT which is subjected to high current shock has open circuit and short circuit fault, which will cause the motor system failure. Due to the influence of high temperature and mechanical vibration, permanent magnet of motor will produce demagnetization and even permanent loss of magnetism. There will be an open or short circuit in the power bus. For the current sensor, there are bias, gain and damage, and the main fault forms of speed sensor are damage and deviation.
Main failure modes of components
Main failure modes of components
After determining the main failure mode of the system, torque, speed, current, response time and other common parameters are selected to measure the reliability of the system in this study. According to the measurement standard, the PMFSM system is divided into normal state, slight fault, serious fault and failure state.
In this study, it is considered that the normal state satisfying the reliability criterion is 0. Due to five minor faults, such as winding inter-turn short circuit and permanent magnet loss of excitation, the observed speed, current and torque do not meet the reliability measurement standard, but the system can still operate safely, which is quantified as 1. The above five minor faults occur again, which is quantified as 2. The fault that causes the system to be unsafe, damaged or unable to operate is quantified as 3.
The failure rate of the main failure mode refers to the failure rate of induction motor and synchronous motor in the literature. In other words, every 109 hours of operation, the components in a single component have a failure. In this study, in order to facilitate the generation of observation sequence, hours are converted into days. For example, the occurrence rate of winding inter-turn short circuit fault is 2.64 × 10−5/days, which can be understood as 2.64 times of winding inter turn short circuit in 105 days. The failure of some components will lead to system failure, such as motor winding phase to phase short circuit, and some will lead to slight system failure, but will not affect the system operation, such as permanent magnet loss of excitation.
According to the design requirements of the system and the simulation study of the failure criteria, it is believed that not every fault will lead to the fluctuation of all measurement parameters. For example, in the simulation, it is found that the bias and gain of the current sensor have little effect on the speed, the loss of excitation and damage of the permanent magnet have little effect on the speed, and the winding turn to turn short circuit does not affect the response time of the system. So we measure the four criteria separately to determine the multiple observation sequence, which is shown in Table 3.
Failure rate and effect
The reliability state of the motor system under each failure mode is the basis of the reliability analysis model. In this study, the simulation results of some faults are compared with the evaluation criteria to determine the reliability state of PMFSM system when a single fault occurs. Taking 12/10 pole PMFSM system as an example [22], the simulation model based on SVPWM is established in MATLAB/Simulink. The simulation block diagram is shown in Fig. 5.
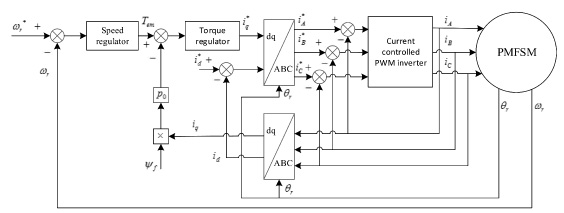
Simulation block diagram.
The voltage equation of PMFSM in the dq coordinate system can be written as:
The electromagnetic torque equation of PMFSM can be written as:
According to the mechanical motion equation, the torque equation can be obtained:
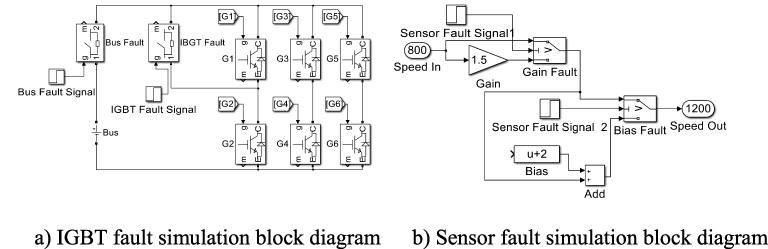
Sensor fault simulation block diagram.

Partial fault simulation current waveform of PMFSM system.
The speed of the PMFSM is 800 rpm and load is 5 N⋅m, and apply the fault signal when the time is 0.5 s. The simulation waveform of IGBT short-circuit fault current is shown in Fig. 7(a). When the fault occurs after 0.5 s, the system will fail after the current reaches the amplitude instantaneously. The simulation waveform of winding open circuit fault current is shown in Fig. 7(b). The open circuit of phase a winding occurs in 0.5 s, and the current of the other two phases rises sharply. The simulation waveform of torque is shown in Fig. 8(D). The torque fluctuates greatly, and the motor cannot operate reliably at this time. The simulation waveform of winding phase to phase short circuit fault current is shown in Fig. 7(C). After the fault, only one phase current of the motor fluctuates and the system fails. The simulation waveform of current sensor gain fault current is shown in Fig. 7(D), the three-phase current increases slightly, the torque simulation waveform is shown in Fig. 8(a), the torque fluctuates slightly, and the system can still operate. The simulation waveform of bias fault current of current sensor is shown in Fig. 7(E), the current of one phase is offset, the simulation waveform of torque is shown in Fig. 8(b), the torque fluctuates slightly, and the system can still operate. The simulation waveform of current sensor damage fault current is shown in Fig. 7(F), three-phase current is invalid, and the simulation waveform of torque is shown in Fig. 8(C). The torque has a short-time large amplitude oscillation, and then the system fails.

Partial fault simulation torque waveform of PMFSM system.

Experimental platform of PMFSM system.
Because the reliability experiment is based on the system failure, some faults such as short circuit fault can be realized by the system simulation, but the prototype experiment is prone to personal injury. Therefore, this study selects the current sensor fault and one phase winding open circuit fault for the reliability experimental research. The experimental platform is shown in Fig. 9. The current sensor fault is realized by software, and the open circuit fault is realized by opening the air switch. By comparing the experimental results, simulation results and qualitative analysis, the correctness of the system failure mode evaluation in this study is verified.
Figure 10(a) shows the current waveform of phase A after 1.5 times of current sensor gain fault, and Fig. 10(b) shows the current waveform of phase A after open circuit fault.
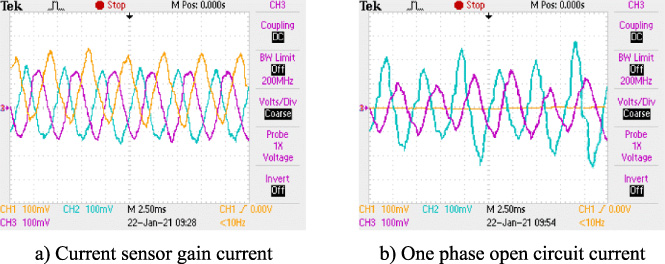
Waveforms of three-phase current and partial fault current.
Based on the analysis of winding current under partial fault condition, the torque waveform of current sensor fault and winding open circuit fault is discussed. Figure 11(a) shows the torque sampling curve of phase A when current sensor offset 1A fault occurs, and the torque curve fluctuates regularly after the fault point. Figure 11(b) shows the torque sampling curve of phase A when the current sensor gain is 1.5 times, and the torque curve fluctuates after the fault point. Figure 11(C) is the torque sampling curve when the current sensor failure occurs in phase A. After the failure point, the torque curve fluctuates violently and the system fails. Figure 11(d) is the torque sampling curve when the open circuit fault occurs in phase A. The torque curve vibrates violently and cannot meet the use requirements. Through comparative analysis, the change of torque experimental curve in fault state is consistent with the change of current experimental curve, and the similarity between experimental results and system simulation results is high.
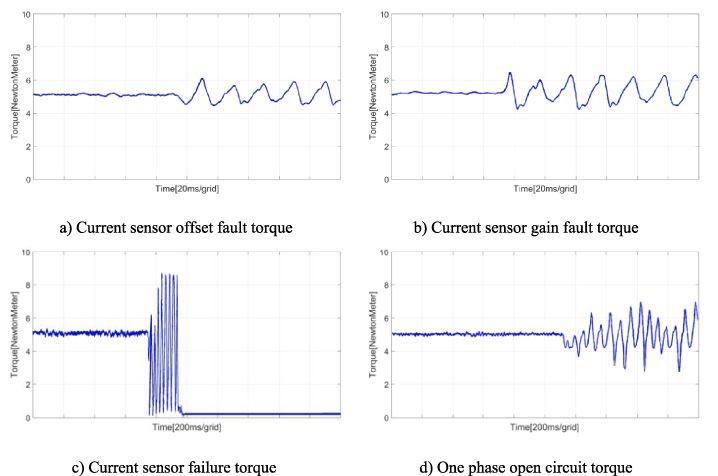
Partial fault torque curves.
Design of permanent magnet hybrid segmented PMFSM
In this study, a permanent magnet hybrid segmented PMFSM is proposed and applied to the reliability evaluation example. The three-dimensional structure of the conventional PMFSM is shown in Fig. 12, and the finite element model of the new hybrid segmented PMFSM is shown in Fig. 13. Each permanent magnet in the conventional PMFSM is divided into four segments, which are arranged in a tangential and radial mixed way. The segments of the permanent magnet are fixedly connected by magnetic conductive materials, so that 12 stator core units can form a whole, which increases the mechanical strength of the motor. At the same time, the permanent magnet is directly inserted into the stator core, which simplifies the stator assembly. This structure can reduce the amount of permanent magnet and improve the utilization rate of permanent magnet.
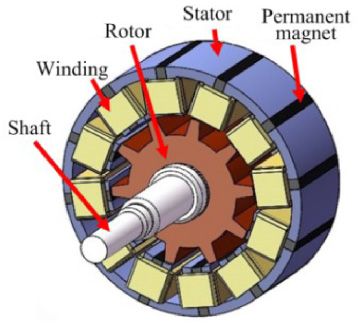
Structure of PMFSM.

“Mixed” PM segments PMFSM.
The basic parameters of the permanent magnet hybrid segmented PMFSM evaluated in this study are shown in Table 4.
Optimize design results
The torque performance of PMFSM of traditional permanent magnet, permanent magnet radial segment, permanent magnet tangential segment and permanent magnet hybrid segment is simulated and analyzed, as shown in Table 5. It can be seen that the electromagnetic torque performance of the permanent magnet hybrid segmented PMFSM is improved, and the torque ripple and cogging torque are suppressed. The induced potential of the permanent magnet hybrid segmented PMFSM is compared with that of the conventional PMFSM. The analysis results are shown in Fig. 14. The solid line in the figure represents the simulation curve after segmenting, and the dotted line represents the simulation curve before segmenting.
Influence of segment of PM on torque performance
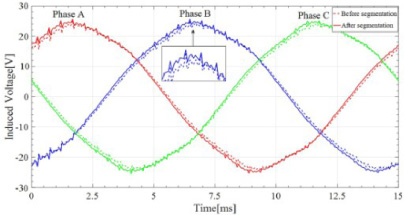
Three phase induced voltage in the motor before and after segmentation.
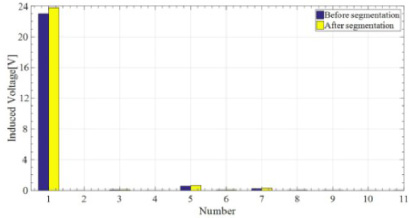
Frequency spectrum of the induced voltage.
It can be seen from the figure that the induced potential is similar to sine wave. The difference between the induced potential waveform of the motor after the permanent magnet segmentation and the front section is very small. The Fourier decomposition of the induced potential is carried out to obtain the distribution of the harmonic components of the motor as shown in Fig. 15. The fundamental wave amplitude of the induced potential increases slightly after the permanent magnet is segmented, while the amplitude of the third, fifth and seventh harmonic is basically unchanged.
In this section, the HMM based evaluation method is used to study the reliability of the system with the above PMFSM. Based on the premise of system failure and the hidden Markov state transition, the conventional PMFSM and the permanent magnet hybrid segmented PMFSM are calculated respectively to prove the influence on the system reliability of the new structure. In the conventional PMFSM, when a permanent magnet is demagnetized or damaged, the magnetic field in the motor will change, which will affect the stable output of the motor system. After the permanent magnet is segmented, the performance stability of the permanent magnet is improved. When one permanent magnet fails, the magnetic field of the motor changes little. This section mainly studies the reliability comparison between the conventional PMFSM and the new permanent magnet hybrid segmented PMFSM.
According to the probability of each failure mode in the failure mode evaluation, the state transition probability of the permanent magnet hybrid segmented PMFSM is calculated. The results are shown in Table 6.
Results of fault state transition probability of PMFSM
Results of fault state transition probability of PMFSM
Taking the calculation of current observation sequence as an example, the fitting curves of some current observation sequences are shown in Fig. 16.

Partial current measurement standard observation sequence curves.
Selected observation sequence curve.
The Minkowski distance between the current observation sequences is calculated by MATLAB, and the calculation results are shown in Table 7. The curve with the minimum sum of Minkowski distance is taken as the current observation sequence, and the fitting curve of the current observation sequence is calculated, as shown in Fig. 17. The observation curves of each parameter are obtained repeatedly.
Minkowski distance of partial current measurement sequence
The probability distribution of the normal state of the system is
Each observation sequence is substituted into 𝜌0 = (
The Forward-Backward algorithm is used to calculate the probability value P (O|𝜌) of observation sequence under 𝜌 = (
Then the system reliability at time t is R s (t) =1 − P 3(t).

Iterative curve of HMM model.
It can be seen from the above calculation that the proposed evaluation method only needs to construct the parameter observation sequence, substitute each parameter observation sequence into the hidden Markov model, and use the Baum Welch algorithm for iterative calculation to obtain the reliability evaluation state transition probability matrix. Compared with the traditional evaluation method based on the Markov model, the calculation is simple. The amount of calculation is greatly reduced.
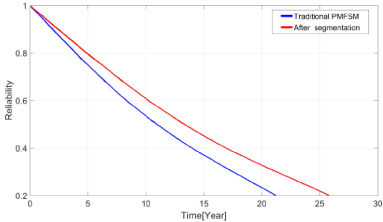
The reliability of the conventional structure and the novel structure PMFSM system is analyzed by using the evaluation method based on the HMM. The failure transition probability based on current parameters under normal state is shown in Table 8, and the reliability calculation curve is shown in Fig. 19. It can be seen from Table 8 that the probability of the new structure keeping normal state is higher than that of the conventional structure, and the probability of failure is lower than that of conventional structure. This is because in the hybrid segmented permanent magnet PMFSM system, the combined part of each segment can be regarded as a permanent magnet, and the failure of a single segment will not cause the overall failure, so the failure rate of the permanent magnet decreases and the probability of failure decreases. It can be seen from Fig. 19 that the reliability of the new structure is significantly higher than that of the conventional structure at the same time. The area between the coordinate axis and the curve in the figure represents the mean time to failure (MTTF) of the system. After calculation, the MTTF of the conventional structure is 7.82 years, and that of the permanent magnet hybrid segmented structure is 8.98 years, which is 14.8% higher than that of the conventional structure. It shows that the PMFSM system with new permanent magnet hybrid segmented structure has higher reliability.
Current parameter fault state transition
Current parameter fault state transition
The calculated values of MTTF under different algorithms
Reliability curve of PMFSM systems.
The traditional evaluation method based on the Markov model [15] is used to calculate the reliability of the conventional structure and the new structure PMFSM system respectively. In order to compare with the method proposed in this study, the calculation results of the two methods are listed in the same table, as shown in Table 9. It can be seen from Table 9 that under the two evaluation methods, the MTTF of the permanent magnet hybrid segmented structure PMFSM system is higher than that of the conventional type, and the trend is basically the same. Moreover, the calculation results of the two methods for the same motor are similar, and the error is not more than 10%, which is within the acceptable range of the project. Therefore, the evaluation method proposed in this study is feasible and effective. Calculation of two kinds of model, Markov model estimates need to compute variable transition probability, large amount of calculation, and Hidden Markov models only build parameters under the observation sequence, to simplify the calculation, compared with the Markov model has a certain difference, but the reliability for numerical precision is not very strict. The results of hidden Markov model and Markov model are not different, the trend is the same, more advantageous.
In the framework of the reliability evaluation of motor systems, to address the problems of complex calculation in the reliability evaluation scheme based on the Markov model, this study proposed a reliability evaluation method based on the Hidden Markov model and the Baum Welch algorithm. Subsequently, the proposed method was applied to a type of permanent magnet hybrid segmented flux-switching motor. The model of the PMFSM system was simplified, and its failure mode was analyzed. Next, the simulation and experimental verification were conducted. The corresponding relationship between the system failure mode and parameters was established. By constructing the optimal parameter observation sequence of the system and using the Baum Welch algorithm to train the HMM model iteratively, the state transition probability matrix of the system was determined, and then the system reliability was evaluated through the mathematical operation. The conventional method based on the Markov model and the method proposed in this study was adopted to evaluate the reliability of the conventional PMFSM system and the permanent magnet hybrid segmented structure PMFSM system, respectively. As indicated from the results, the calculation results achieved by using the two methods were consistent, showing the identical change trend, which demonstrated the developed reliability evaluation method to be reliable and effective. Moreover, the permanent magnet hybrid segmented PMFSM system achieved the MTTF 14.8% higher than that of the conventional PMFSM system, which demonstrated that the reliability of the novel PMFSM system was significantly improved. Since the selected optimal parameter observation sequence and the Baum Welch algorithm were applied for the iterative calculation, the calculation was significantly simplified. Thus, the developed method was suggested as a practical engineering method to efficiently evaluate the motor system’s reliability. The reliability evaluation of this study can be referenced for the safe use of motor products, which is of high practical significance.
Footnotes
Acknowledgements
This work is supported by Heilongjiang Natural Science Foundation (E2015063) and Joint Fund of the Ministry of Education for Equipment Pre-research (8091B022133).