
Abstract
This paper presents a novel approach to the efficiency improvement of permanent magnet synchronous motor using gravitational search algorithm as an optimization tool. The gravitational search algorithm (GSA) is a recently developed meta-heuristic optimization algorithm, which so far has proven to be quite suitable for solving power engineering optimization problems. The aim of this research work is to implement this novel optimization algorithm for the efficiency improvement of permanent magnet synchronous motor, where the objective function in the optimization process is the efficiency of the investigated motor. Comparative analysis of the initial and a number of optimized solutions of the motor model is performed.
Keywords
Introduction
Energy efficiency in general became a top theme in the modern world societies. Today energy efficiency strategies are implemented in power production, transmission and distribution as well as energy consumption in industry, commercial buildings and households. In most of the areas the energy efficiency improvement is related with the energy efficiency of power devices. One of those devices that are intensively investigated are the electric motors as one of the biggest consumer of electrical energy in the world. Having in mind this fact, as well as the increased need for improvement of the energy efficiency stimulated many electrical engineers and researchers to put an effort in this area in order to improve the efficiency of different types of motors. It is well known that in the past two decades or so, different approaches and optimization procedures were implemented to the design procedures for a variety of electrical machines. Novel materials were also implemented. The optimal design of electrical machines in general can be performed using a variety of objective functions such as: efficiency, torque, power factor, output torque, cogging torque, volume, mass, cost or sometimes a combination of some of these objective functions known as multi-objective or many-objective optimization. In this research work the efficiency of the motor has been selected as an objective function for the optimal design of the permanent magnet synchronous motor.
It is well known from literature and persona experience that the optimal design of electrical machines is a constrained maximization or minimization problem with a large number of optimization parameters and variety of constraints that have to be fulfilled during the optimization process [1]. The design of a machine can be described by a vector X of n variables stating dimensions or dimension ratios, current densities, flux densities, etc. The design is subject to a set of m constraints which may include specifications arising from thermal, mechanical, manufacturing or standards limits. This makes it a difficult problem to solve by hand and therefore at the early stages scientists and researchers were trying to implement different types of optimization methods. The first methods that were implemented belong to the group of methods named as deterministic methods [2–5]. In those methods the quality of the search is highly dependent on the selection of the starting point, as well as the determination of the first order derivation in some cases that is usually hard to determine. Latter on John Holland [6,7] in 1973 gave an introduction to the Adaptation in Artificial Systems that traced the road towards the promotion of Evolution strategies, Genetic algorithms and similar stochastic algorithms that are based on natural evolution principles and mechanisms. In comparison with the deterministic methods the stochastic methods start their search based on a randomly generated population. These methods work through the optimization area based on the information of the objective function called fitness and not the values of the optimization variables as in the case of the deterministic methods. These are the reasons why those algorithms after their introduction became very popular and were implemented very successfully in optimal design of electromagnetic devices [8–11]. Today there is a large number of scientific works dedicated to implementation of Genetic algorithms in optimal design of electromagnetic devices. Afterwards many other algorithms emerged based on the principles of animal behavior and nature mechanics such as: Particle Swarm Optimization (PSO) [12], Differential Evolution [13,14], Ant Colony [15], Firefly Algorithm [16], Cuckoo Search [17] and many more. Today there are over 100 nature inspired algorithms [18,19]. Among those methods one method has been drawing attention to the optimization and research community. This method is known as Gravitational Search Algorithm (GSA) [20]. The proposed algorithm so far has been very successfully used for different optimization purposes [21–25]. Based on the findings of the authors of this algorithm, GSA has been confirmed to have a bit higher performance in searching ability in relation to other population based stochastic methods, such as GA and PSO. Based on the findings in literature it can be concluded that most of the population based algorithms perform in a similar way and that no specific method can be defined as a dominant one. Most of them are problem dependent and in different optimization procedures perform differently. The aim of this paper, based on the good results and positive experience in the application of GSA in other areas, is to implement this algorithm in the process of energy efficiency improvement of a permanent magnet synchronous motor (PMSM). In this investigation the efficiency of the motor is selected to be the objective function. Comparative analysis of the optimal motor solution based on the objective function value, as well as the values of other important parameters in relation to the initial model is performed and the results are presented in the text that follows.
The law of gravity
In 2009 Rashedi et al. [20] proposed a new meta-heuristic searching algorithm shortly named Gravitational Search Algorithm – GSA. The introduced algorithm is based on Newton’s law of gravity and law of motion. The law of gravity states that every particle attracts every other particle and the gravitational force between two particles is directly proportional to the product of their masses and inversely proportional to the square of the distance between them, as presented in Eq. (1):
Based on (1) and (2), there is an attracting gravity force among all particles of the universe where the effect of bigger and closer particle is higher. An increase in the distance between two particles means decreasing the gravitational force between them as it is illustrated in Fig. 1. In this figure, F1j and causes the acceleration vector a is the force that acting on M1 from M j and F1 is the overall force that acts on M1 and causes an acceleration of the vector a1.
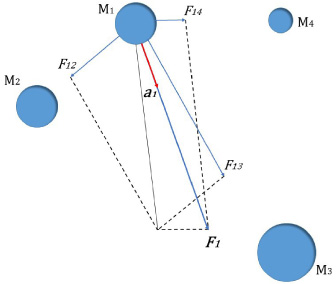
Influence of other masses on mass M1.
Additionally, the change of the gravitational constant as a result of the aging of the universe should be taken into consideration and determine using Eq. (3) in which the gravitational constant G decreases with the age [27].
In theoretical physics there are defined three kinds of masses:
Based on the previously mentioned aspects the Newton’s laws can be rewritten. The gravitational force, F
ij
, that acts on mass i by mass j, is proportional to the product of the active gravitational of mass j and passive gravitational of mass i, and inversely proportional to the square distance between them. On the other hand the acceleration a
ij
is proportional to the force F
ij
and inversely proportional to inertia mass of i. The above statement can presented by rewriting Eqs (1) and (2) as follows:
The presented Newtonian laws were very successfully implemented by Rashedi et al. [20] in a new optimization algorithm called Gravitational Search Algorithm (GSA). In the following text the main principles of this algorithm is presented.
According to the proposed algorithm, the objects in the algorithm are defined as agents, the performances of which are measured by means of masses. Hence, all these objects attract each other by a gravity force, and this force causes a global movement of all objects towards the objects with heavier masses. Since the heavier masses have higher fitness values; they describe good optimal solution to the problem and they move more slowly than lighter ones representing worse solutions. In GSA, each mass has four particulars: its position, its inertial mass, its active gravitational mass and passive gravitational mass. The position of the mass equalled to a solution of the problem and its gravitational and inertial masses are specified by using a fitness function. In other words, each mass performs a solution and the algorithm is navigated by appropriately adjusting the gravitational and inertia masses.
The proposed GSA could be considered as an isolated system of masses. It is like a small artificial world of masses obeying the Newtonian laws of gravitation and motion. More precisely, masses obey the following laws:
The authors of the GSA take into consideration a universe of N masses (agents), where the position of the i-th agent is defined as:
At a specific time ‘t’, the force acting on mass ‘i’ from mass ‘j’ as following:
The concept of the gravitational forces acting between the agents and a presentation of their movement in the search area for one iteration is presented in Fig. 2. Based on the presentation in Fig. 2 it can be concluded that the agents with smaller masses or smaller fitness values of the objective function tend to move towards the agents with larger masses. In this movement some agents reach better values and some get not so good values. Also the velocity of their movement is different the agents with greater masses move slowly while the agents with smaller masses tend to move faster and therefore their acceleration is different.
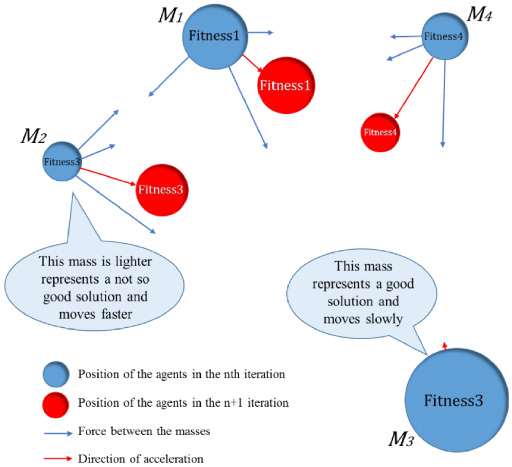
The concept of the gravitational forces.
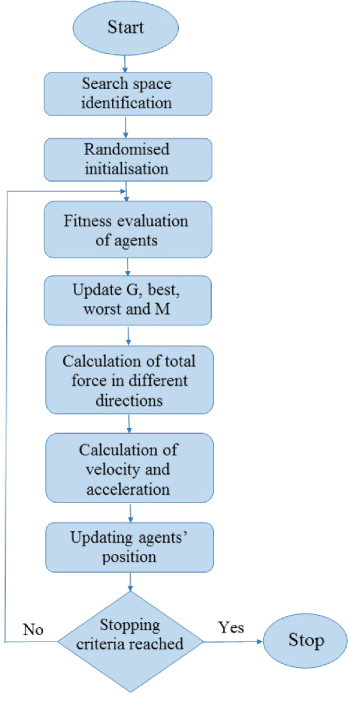
The structural presentation of the Gravitational search algorithm is presented with the block diagram in Fig. 3. The GSA optimization is performed using 50 agents during 1500 iterations.
Main steps of the Gravitational Search Algorithm.
In this paper the GSA is applied as an optimisation tool in the process of efficiency improvement of a permanent magnet synchronous motor (PMSM). Several GSA performnce parameters were adjusted to meet the appliation. The investigated motor is a surface mounted permanent magnet motor with 36 slots on the stator and a rotor with 6 samarium-cobalt permanent magnets that have a remanent flux density of B r = 0. 95 T and coercitive filed of H c = −720 kA/m. The efficiency of the motor is selected as an objective function in the optimal search process. In this case the following motor parameters are selected to be variable in the optimization process: outside radius of the rotor iron core R ro , permanent magnet fraction f m , permanent magnet radial height h m , air-gap g, and axial active length of the motor L.
An overview of the motor together with the variable optimization parameters is shown in Fig. 4. A proper mathematical model of the motor is developed as one of the contributions of this paper. The mathematical model of the motor consists of equations that define all design motor parameters. In this mathematical presentation of the motor the objective function, in this case the efficiency of the PMSM, is defined and implemented in the gravitational search algorithm [20] and is expressed by the following equation:
The power losses presented in Eq. (10) are defined with the following equations:
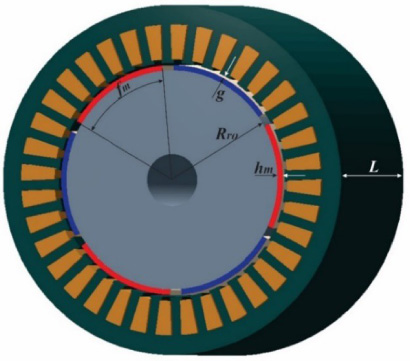
Permanent magnet synchronous motor optimisation parameters.
The efficiency improvement is a maximisation problem of the objective function in which the value of the efficiency of the motor is maximised, where the torque is one of the constraints. A presentation of those constrains is shown in Table 1. In the mathematical model of the motor, implemented in the Gravitational search algorithm, all the parameters of the motor are defined in function of the optimisation parameters that are presented in Fig. 4. Each parameter is varied in its own lower and upper boundary value using the following equation:
Optimization constraints
Optimization parameters, boundaries and values
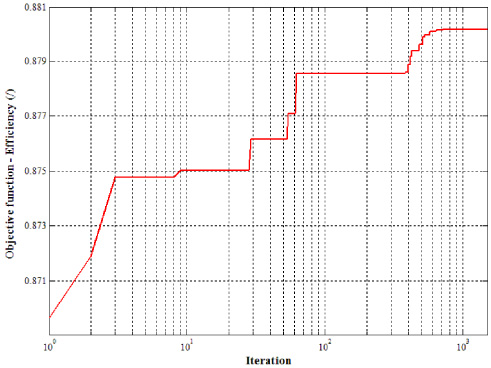
Objective function change during the GSA search.
The convergence of the objective function of the motor during the best GSA optimisation search for 1500 iterations is shown in Fig. 5. The presented optimal solution is defined as the best because each mass (agent) is defined with its position, inertial mass, active gravitational mass, and passive gravitational mass, and because those parameters have a stochastic nature each search results with a different optimal solution. After a large number of computations the results start to repeat. The values of the parameters and the efficiency for those selected solutions are presented in Table 3.
Optimization parameter comparison of the selected solutions
On the other hand a comparative presentation of the influence of the parameters on the efficiency of the solutions for selected parameters is presented in Fig. 6. In Fig. 6 the distribution of the solutions in the area defined by the height of the permanent magnets and the permanent magnet fraction is presented. The values shown next to each solution are the values of the efficiency of the selected and presented solutions. Based on the presented results in Fig. 6 it can be concluded that the solutions tend to group towards larger values of the permanent magnet fraction, larger values of the PM height, smaller values of the air gap and larger values of the axial active length of the motor. Generally speaking the algorithm tends to increase the mass of the active materials in order to improve the efficiency, which in practice is a standard approach towards high efficiency motors.
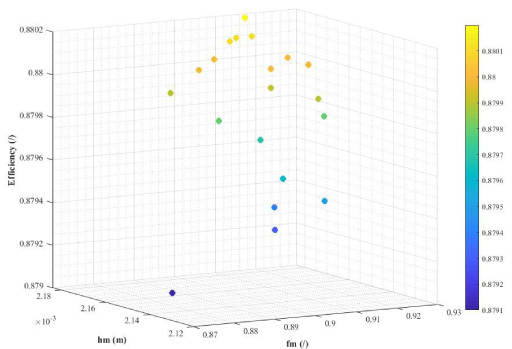
Presentation of the efficiency in funciton of the parameters h m and f m .
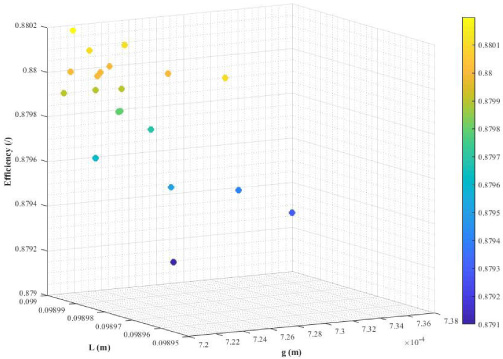
Presentation of the efficiency in funciton of the parameters g and L.
The same analogy is used for the data shown in Fig. 7 from which the presentation of the dependence of the efficiency of the solutions in function of the parameters g and L is shown.
Sometimes an additional analysis is needed in which additional motor properties, parameters of objectives can be involved in the determination of the optimal solution. Especially this is a good approach if there are a wide range of solutions with close results. Therefore, in this paper an additional extended analysis of the results will be implemented.
It is well known that the design of electrical machines in general is a multi-variable and multi-objective process. As it has been seen previously the multi-variable optimization can be easily solved using stochastic optimization methods. In a single objective function optimization the optimizer is working only with one function and not taking into account the other objectives. One way to improve the search is to perform the single objective approach, but changing the objective function and then at the end to compare the best solutions from each optimization. Another way is to perform a multi-objective or a many-objective optimal design [29], but then the problem of defining the influence of each partial objective function on the general optimization function is still present and is usually a problem dependent. With a bit of experience in this area this problem can be easily solved. In this work an additional analysis will be realised in order to detect how the optimization of the efficiency of the motor influences other selected parameters and quantities. In Table 4 part of those parameters such as air gap flux density–B g , phase resistance–R ph , total iron mass–mFe, total copper mass–mCu, total mass of permanent magnets–m pm , and total motor mass–mtot are presented, where in Table 5 an additional parameters like copper power losses–PCu, iron power losses–PFe, total power losses–Ptot and phase current–I ph are also presented for the optimized solutions (1–20) and the initial model (0).
Selected parameters comparison of the selected solutions (1–20) and the initial model (0)
Selected parameters comparison of the selected solutions (1–20) and the initial model (0)
For the extended analysis selected data from Tables 4 and 5 is used to graphically present some of the relationships between certain motor parameters. Therefore, in Fig. 8 the influence of the total iron power losses–PFe and the copper power losses–PCu on the efficiency of each solution are presented. The best and worst solution regarding the value of the efficiency are highlighted. It is obvious that the copper power losses have great impact on the efficiency of the solutions, due to their high value, and therefore the selected best solution regarding the efficiency is also the best solution regarding the copper power losses, while the worst solution has the highest value for the copper power losses. On the other hand the iron power losses have a significantly lower value and therefore a smaller influence on the efficiency of the solutions. That is why the selected best solution does not have the smallest iron power losses value, while the worst solution has the smallest value for the same losses. Similar analysis can be performed for the presented results in Fig. 9, where the presented solutions are distributed regarding the total power losses and the total mass of the motor. The best solution has the smallest value for the total power losses, while the worst solution has the highest value for the total power losses in comparison to the other solutions that are distributed between the values of those two solutions. Regarding the total mass of the motor the worst solution has the smallest mass among all the solutions, while the best solution regarding the efficiency has a mass that is in the range of the majority of solutions.
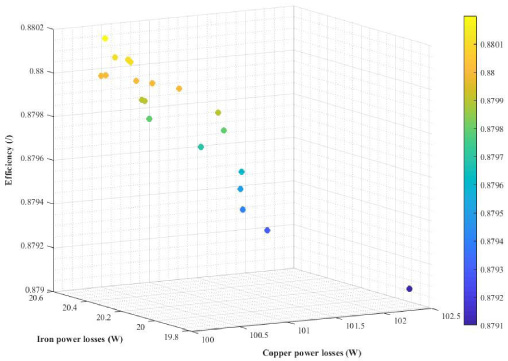
Presentation of the efficiency in relation to P Fe and P Cu.
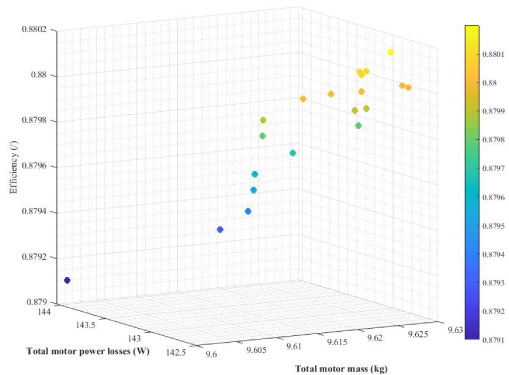
Presentation of the efficiency in relation to total power losses and total motor weight.
Power losses and phase current comparison of the selected solutions (1–20) and the initial model (0)
This brings us to a conclusion that the single objective optimization besides taking care of the value of the objective function to some extent has an influence also on some other parameters of the motor. But unfortunately the single objective optimization does not take care of all the motor parameters such as the total mass in this case. Therefore, one way to tackle this problem is the perform different optimization procedures using different objective functions and then put all those solutions in a Pareto analysis or use a multi-objective or many-objective optimization approach [29]. Additional motor parameters that can be taken into consideration in such an analysis are the values of the power over mass ratio, power over volume ratio or even cogging torque as one of the important performance parameters of a permanent magnet motors. Additionally for a more detailed investigation a traditional finite element method analysis for the initial solution and the best solution is performed and will be presented in the following text. The comparative analysis of the three motor models is going to be extend by using the commercial program Motor-Solve by Infolytica [30] that is based on the finite element method.
In the Motor-Solve program [31] a proper modelling of the initial and optimized motor models is performed. All the necessary data regarding the dimensions, materials, supply and load are applied for the two analyzed motor models. The first parameter that has been calculated is magnetic field in the two dimensional domain of the motor taking into account the axial length of the motor. Based on the presented magnetic field distributions, especially for the optimized solution, it can be concluded that the values of the flux density in the segments of the motor of special interest (stator back iron and stator teeth) are smaller than the values prescribed as constraints. The magnetic field distribution for the two motor models is presented in Figs 10 and 11.
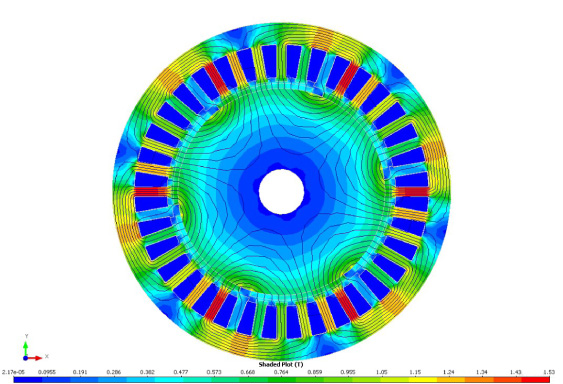
Magnetic field distribution for the initial motor.
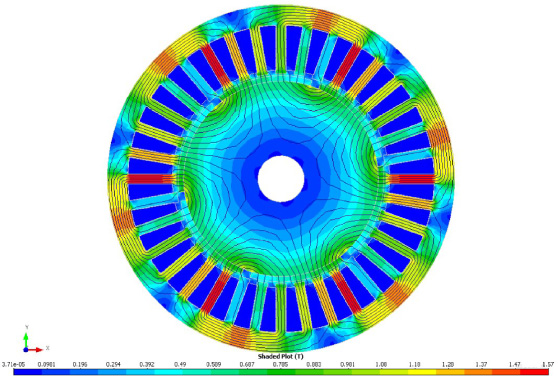
Magnetic field distribution for the gravitational search algorithm solution model.
The next motor parameter that is going to be presented and compared is the air gap flux density distribution for the analyzed two motor models. The average values of the air gap flux density calculated analytically from the optimization process are presented in Table 6. From the presented air gap flux density distribution and the analytically calculated average values, shown in Figs 12 and 13, it can be concluded that there is also a good agreement between those values.
Air gap flux density comparative data
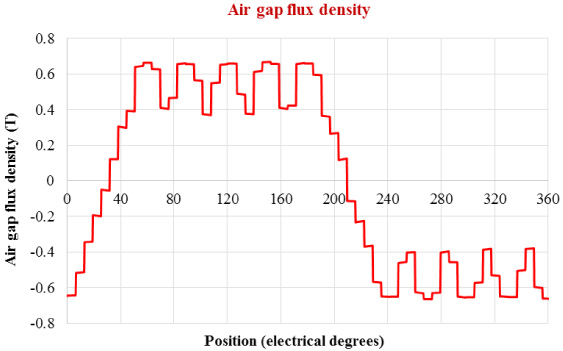
Air gap flux density distribution for the initial motor.
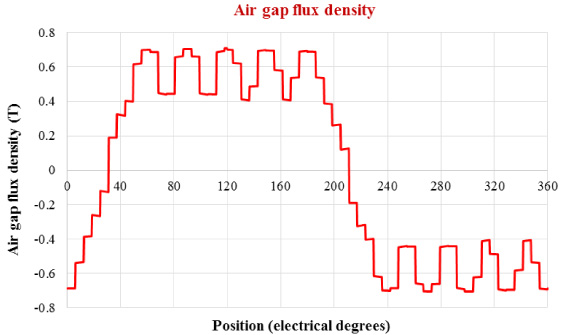
Air gap flux density distribution for the gravitational search algorithm solution.
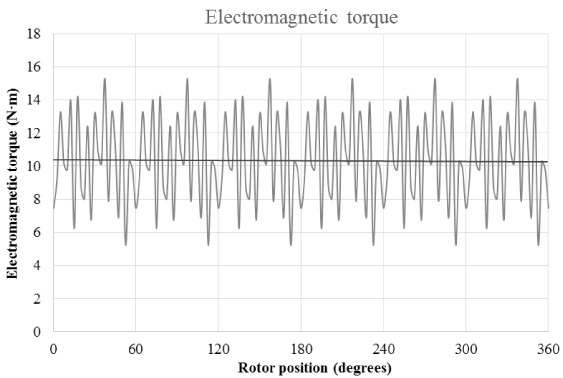
Electromagnetic torque distribution for the initial motor.
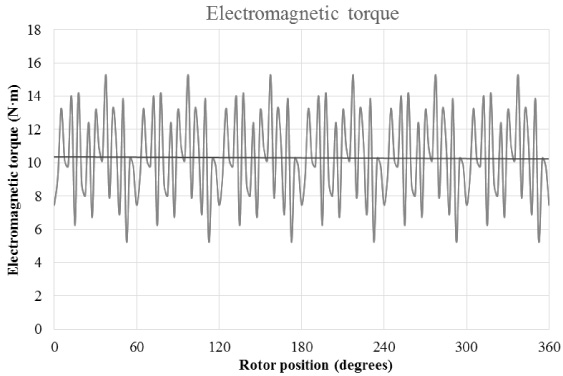
Electromagnetic torque distribution for the gravitational search algorithm model.
The load torque of the motor is parameter that in the optimization process is defined as a constraint and is equal to 10 Nm. Using the finite element analysis program the electromagnetic torque can be obtained. In general the value of this torque is slightly larger that the load torque, as it is in the case of the invastigated motor. The initial motor and the GSA model have the same avarge value of the electromagnetic torque, as shown in Fig. 14 and Fig. 15, respectively. This means that the torque as a constraint during the optimization is satisfied and reached.The good agreement of the values proves the well determined mathematical model of the permanent magnet synchronous motor, as well as the good performance of the optimization method.
In this paper the authors are giving a brief presentation of a novel technique for optimal design of electrical machines, named Gravitational Search Algorithm that has been introduced and implemented. The efficiency of the motor has been selected as an objective function in the optimal design. Based on this methodology a set of optimal solutions of the permanent magnet synchronous motor were reached, due to the stochastic nature of the optimization method. In those solutions the value of the motor efficiency varies between 0.8791 and 0.8802. Afterwards an extended analysis has been implemented in order to evaluate all the solutions using other motor quantities and parameters. In addition finite element analysis of the initial and best GSA solution is performed and the magnetic field distribution and air gap flux density distribution is analysed. Based on the presented data and graphs it is evident that the optimized GSA solution is a better solution in all aspects in relation to the initial model. As a future work additional investigations will be performed in which several other solutions from the GSA optimization will be included in the comparative performance analysis using also additional motor parameters.