
Abstract
Diamagnetic levitation is a physical phenomenon that uses the diamagnetism of diamagnetic materials to stably levitate itself in an external strong magnetic field, which has great potential in the areas of sensors, actuators, and biomedicine. In this paper, a typical diamagnetic levitation system composed of a NdFeB permanent magnet array and pyrolytic graphite sheet is built. The levitation mechanism of the diamagnetic levitation system is analyzed theoretically, the main factors affecting the static levitation of the pyrolytic graphite sheet are determined, and the influence of structural parameters on the levitation height of the pyrolytic graphite sheet is studied. Furthermore, the dynamic and numerical simulation models of the diamagnetic levitation system are established, and the dynamic response characteristics of the pyrolytic graphite sheet are analyzed under different vibration excitation. This study provides a reference for developing applications based on the diamagnetic levitation system.
Introduction
Diamagnetism is a property of a substance to repel an external magnetic field, which widely exists in various materials, such as water, copper, pyrolytic graphite (PG), and even living beings [1]. With this property, the diamagnetic materials can be freely levitated in an external strong magnetic field called diamagnetic levitation. However, diamagnetism is relatively weak compared with paramagnetism and ferromagnetism, and the phenomenon is not easy to be observed without an external strong magnetic field. Fortunately, a strong magnetic field can be obtained by arraying the NdFeB permanent magnet [2], which creates an opportunity for people to realize diamagnetic levitation easily. With the participation of permanent magnets, the floating object can maintain a free levitation state without any energy consumption at room temperature, which also brings a powerful frictionless benefit. These characteristics can prevent contact wear, reduce energy loss, and have potential applications in the fields of sensors [3–5], actuators [6,7], microrobots [8], and biological medicine [9].
Many studies on diamagnetic levitation have recently been reported [10–14]. Su et al. [15,16] studied the rotation characteristics of the micromachined PG rotor levitated above a permanent magnet. Xu et al. [17] presented a passive diamagnetic contactless suspension rotor with an electrostatic glass motor. Kang et al. [18] realized the trajectory control of the levitated PG by changing the permanent magnet array. Liu et al. [19] presented a diamagnetically levitated electrostatic micromotor with a free levitation (PG) rotor and rotated the levitated rotor by the axial variable-capacitance electrostatic driving torque. Shimokawa et al. [20] presented a diamagnetic levitation viscometer based on an electromagnetically spinning system. Tkachenko [21] proposed a method of directional self-assembly of small electronic components using diamagnetic levitation. Cheng [22] studied the levitation characteristics of the diamagnetically stabilized levitation structure with a levitated magnet. Huang et al. [23] proposed a diamagnetic force method to study the PG sheet’s stable levitation mechanism. Vikrant et al. [24] designed a 6-DOF positioning platform with low cross-axis motion, large range, and nanoscale resolution using the diamagnetic levitation mechanism. Leng et al. [25] reported a diamagnetic levitated micromechanical oscillator operating at 3 K with measured dissipation down to 0.59 μHz and a quality factor up to 2 × 107. In addition, the diamagnetic levitation system with PG owns good thermal sensitivity. Kobayashi et al. [26] used the photothermal effect to control the motion of a PG sheet levitated on the permanent magnet arrays. Point et al. [27] studied the relation between the levitation height and laser irradiation power and designed a new laser sensor based on diamagnetic levitation. These reported studies mainly stay at the application level and lack further research on the diamagnetic levitation itself, such as structural composition, static levitation characteristics, and dynamic characteristics.
In this paper, a diamagnetic levitation system composed of an NdFeB permanent magnet array and a circular PG sheet is built to study its static levitation characteristics and dynamic response characteristics under external vibration excitation. This paper is organized as follows. In Section 2, the levitation mechanism of the diamagnetic levitation is analyzed theoretically. The influence of the structure parameters on the levitation height is studied in Section 3. In Section 4, the dynamic response characteristics of the PG sheet are studied under different vibration excitation. Section 5 is the conclusion and prospect of this work.
Diamagnetic levitation theory
Figure 1 shows the schematic of the diamagnetic levitation system, composed of a NdFeB permanent magnet array and a circular PG sheet. The NdFeB permanent magnet array is formed by inserting a circular magnet into a ring magnet, and two magnets are magnetized in the axial direction but opposite directions. In the system, the PG sheet will generate an induced magnetic moment M opposite to the magnetic field H produced by the permanent magnet array since the magnetic susceptibility 𝜒 of PG is less than 0. The relationship between
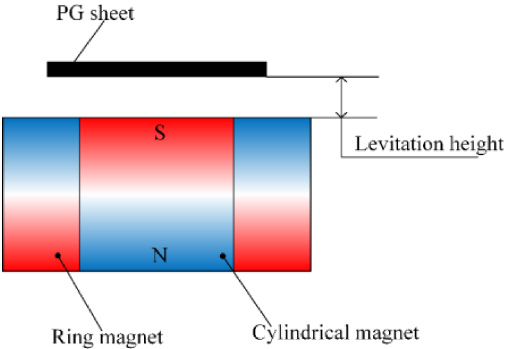
Schematic diagram of the diamagnetic levitation system.
At the same time, a diamagnetic force between two magnetic fields will be generated, and the diamagnetic force
The final expression for the diamagnetic force,
Since the magnetic susceptibility of the PG sheet ((−85, −85, −450) × 10−6) is anisotropy, so
Therefore, the diamagnetic force for the entire volume can be expressed as 
In the diamagnetic levitation system, the magnetic field generated by the NdFeB permanent magnet array is circularly symmetric. When the axes of the PG sheet and the magnet array are aligned, the diamagnetic force in the horizontal plane is also circularly symmetrical, that is, the resultant forces of F
x
and F
y
are zero, and the state of the PG sheet depends on the diamagnetic force component F
z
in the vertical direction. When the PG sheet deviates from the stable levitation position in the horizontal plane, the magnetic field acting on the PG sheet is no longer circularly symmetrical. Moreover, the PG sheet will generate a restoring force in the opposite direction to make it return to the original position. Therefore, the levitation state of the PG sheet is affected by its gravity and the diamagnetic force F
z
in the diamagnetic levitation system, and the resultant force F
j
along the z-axis can be expressed as 
To achieve a stable levitation of the PG sheet, the resultant force F
j
needs to be zero, that is 
It can be seen that the diamagnetic levitation is related to levitation height
According to theoretical analysis, the levitation height of the PG sheet is the main characteristic of static levitation, which is affected by the structure parameters of the diamagnetic levitation system. In the static diamagnetic levitation system, there are no electric current or variable charges, Gauss law and Maxwell’s law equations can be simplified as:
The constitutive relation between the magnetic flux density and the magnetic field is as follows:
Since the permanent magnet has a conservative field, a scalar magnetic potential V
m
is introduced:
Combining Eqs (8)–(11), a governing equation of V
m
can be deduced:
Based on these, a finite element model of diamagnetic levitation structure is established using “magnetic field no current” (mfnc) interface in COMSOL AC/DC module, as shown in Fig. 2, which is utilized to analyze the influence of the structure parameters on the levitation height. In this simulation, the exterior boundary is set to be spherical so that the magnetic field line is perpendicular to the boundary, and all the internal boundaries of the model preserve the continuity of the magnetic flux density. In addition, infinite element is also used to emulate the surrounding infinite open space. The free-meshing algorithm with tetrahedral elements is applied to PG sheet, magnet array, and air domain. The maximum element size of the magnet and PG plate is set to 0.2 mm, while the maximum element size of the air domain is set to 4 mm. The changing trend of diamagnetic force with the gap between the PG sheet and the permanent magnet array can be computed by the simulation model, and the levitation height of the PG sheet can be determined using the stable levitation condition.
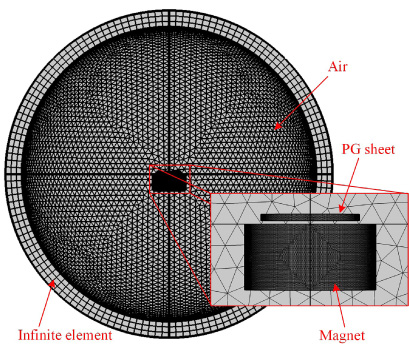
Simulation model of the static diamagnetic levitation system.
However, the correctness of the simulation method has been tested by a static levitation experiment with the structure parameters listed in Table 1. In this experiment, the levitation height of the PG sheet is measured by a laser displacement sensor with a 0.25 μm resolution (MTI Instruments Inc, LTS-025-04), as shown in Fig. 3. The comparison between the experimental results and the simulation results is shown in Fig. 4, the maximum error is less than 14%, which proves that the simulation method is feasible.
Structure parameters of the diamagnetic levitation system
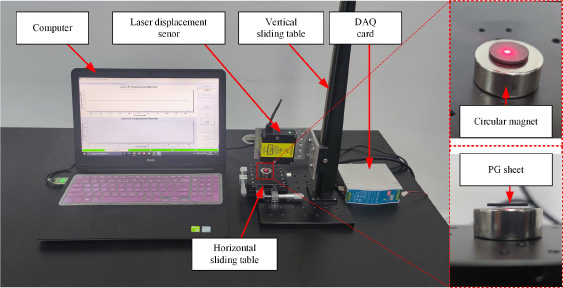
Static levitation experiment setup.
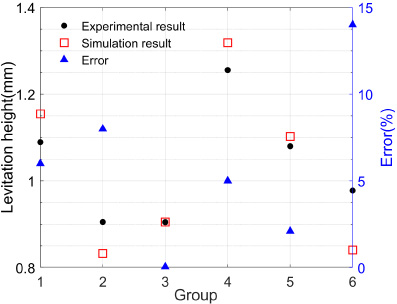
Comparison between experimental results and simulation results.
Table 2 lists five groups of structure parameters of the diamagnetic levitation system. The influence of the thickness of the PG sheet on the levitation height is studied using the structure parameters in group 1, as shown in Fig. 5, the increase of the thickness of the PG sheet will increase its weight, which will break the original equilibrium state and lead to PG sheet closer to the magnet array. However, the magnetic field is stronger near the magnet array, as shown in Fig. 6, which will increase the diamagnetic force of the PG sheet and make it obtain a new stable levitation state, and the levitation height of the PG sheet will be reduced. Therefore, the levitation height decreases with the increase of the PG sheet.
Structure parameters of the diamagnetic levitation system
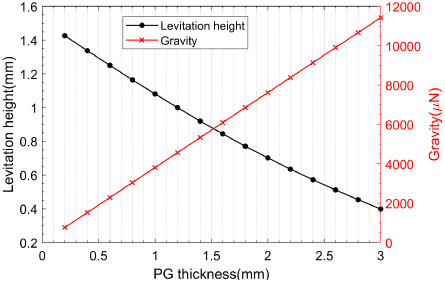
Trend of the levitation height and gravity of the PG sheet with its thickness.
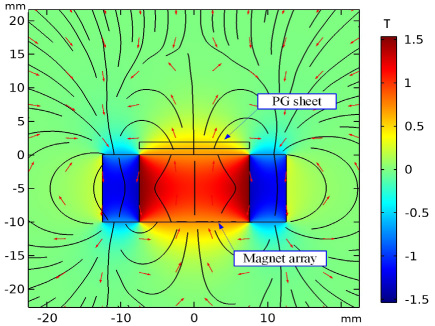
Magnetic flux density of the diamagnetic levitation structure.
The changing trend of the levitation height with the diameter of the PG sheet is studied by the structure parameters in group 2 and illustrated in Fig. 7. When the diameter is less than 18 mm, the levitation height decreases with the increase of the diameter, but the levitation height increases with the increase of the diameter after the diameter exceed 18 mm, and the minimum value of the levitation height is obtained at 18 mm. Figure 7 also shows the absolute mean value of the magnetic field strength (AMV-MFS) acted on the PG sheet at the stable levitation position and the variation trend of the gravity of the PG sheet with its diameter. It can be seen that the variation trend of the levitation height is similar to that of the AMV-MFS. Therefore, it can be inferred that the magnetic field strength caused by the diameter of the PG sheet has a more noticeable impact on the levitation height.
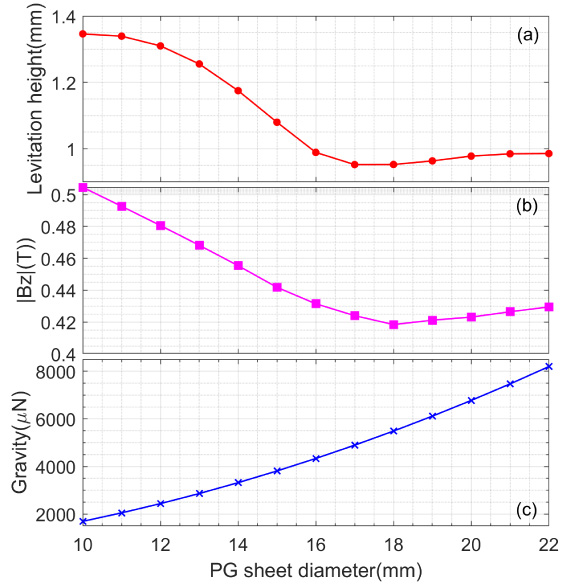
(a) Trend of the levitation height with the diameter of the PG sheet; (b) AMV-MFS versus the diameter of the PG sheet at stable levitation position; (c) relationship between the gravity of the PG sheet and its diameter.
The effects of the ring magnet’s inner diameter, outer diameter, and thickness on the levitation height are studied using the structure parameters in groups 3, 4, and 5, respectively. Figure 8 shows the relationship between the levitation height and the inner diameter of the ring magnet. The levitation height increases first and then decreases as the ring magnet’s inner diameter increases and reaches the maximum when the inner diameter is equal to 15 mm. In the analysis, since the gravity of the PG sheet remains constant, the levitation height mainly depends on the magnetic field strength. However, the magnetic field strength is affected by the inner diameter of the ring magnet, as shown in Fig. 8, which shows a similar trend to the levitation height.
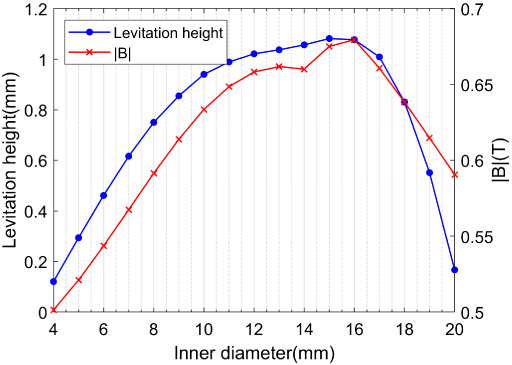
Trend of the levitation height and AMV-MFS above 0.5 mm above the magnet array with the inner diameter of the ring magnet.
Figure 9 shows the variation trend of the levitation height with the outer diameter. The levitation height increases with the increase of the outer diameter in the range of 16 mm–30 mm, but the growth rate of the levitation height gradually decreases. The phenomenon is caused by the effective magnetic field acting on the PG sheet being limited by the end-face area of the PG sheet. Consequently, it can be inferred that the levitation height will no longer increase when the outer diameter increases to a certain value.

Levitation height versus the outer diameter of the ring magnet.
The influences of the thickness of the ring magnet on the levitation height and magnetic flux density are shown in Fig. 10. With the increase of the ring magnet thickness, the levitation height increases first and then decreases and reaches a maximum value when the ring magnet thickness is equal to 15 mm. However, the change in the levitation height is not significant after the magnet thickness exceeds 15 mm. The reason for this phenomenon is that the magnetic flux density above the magnet array does not continue to increase after the thickness exceeds 15 mm, which can be verified in Fig. 10. It can be seen that the magnetic flux density at 1mm above the magnet array increases first and then decreases with the thickness.

Trend of the levitation height and magnetic flux density with the thickness of the magnet array.

Dynamic model of the diamagnetic levitation system.
When a vertical external vibration excitation is applied to the diamagnetic levitation structure, a relative motion will be generated between the PG sheet and the magnet array. However, the relative motion is limited by the static levitation height of the PG sheet. Once the amplitude of the downward movement of the PG sheet is equal to the static levitation height, the PG sheet will collide with the magnet array. Since the PG sheet and the magnet array are rigid, they will separate immediately after a collision. Meanwhile, an induced electromagnetic force will be generated in the PG sheet to hinder the relative movement due to the conductivity of PG. In other words, electromagnetic, gravity, and diamagnetic forces work together on the moving PG sheet. Therefore, the diamagnetic system can be simplified as a mass-spring-damper system with a limited amplitude, as indicated in Fig. 11. The resultant force of the diamagnetic force and gravity is equivalent to the spring force, and the equivalent spring stiffness k (z) is related to the gap between the magnet array and the PG sheet. z 0 is the maximum displacement of downward movement of the PG sheet, which depends on the static levitation height of the diamagnetic levitation system. c is the system damping coefficient related to the induced electromagnetic force. x (t) and z (t) are the external excitations and the dynamic response of the PG sheet, respectively.
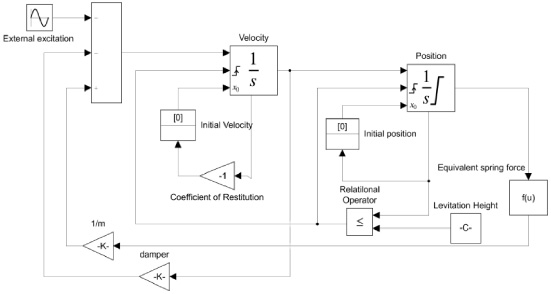
Simulink model of the diamagnetic levitation system.
The dynamic behavior of the mass-spring-damper system can be governed by

Relationship between the equivalent spring force and the displacement of the PG sheet.
According to Eq. (13), a numerical simulation model is established by Matlab/Simulink, which is shown in Fig. 12. In the simulation, the collision between the PG sheet and the magnet array is assumed to be a rigid collision with energy loss. According to the law of conservation of energy and momentum, the velocity change coefficient 𝜂 is set to be −1. To run the model, it is necessary to know the relationship between the equivalent spring force and the displacement of the PG sheet. However, the equivalent spring force is related to the structure parameter of the diamagnetic levitation system. Hence, a ring magnet with the size of 𝜙25 mm × 𝜙15 mm × 10 mm, a cylinder magnet with the size of 𝜙15 mm × 10 mm, and a PG sheet with the size of 𝜙15 mm × 1.0 mm is adopted to build a diamagnetic levitation system, and then the equivalent spring force as a function of the displacement (z) is determined and illustrated in Fig. 13.

Dynamic response behavior of the PG sheet under sinusoidal vibration excitation: (a) vibration excitation; (b) response velocity; (c) response amplitude; (d) motion phase diagram and Poincare map.
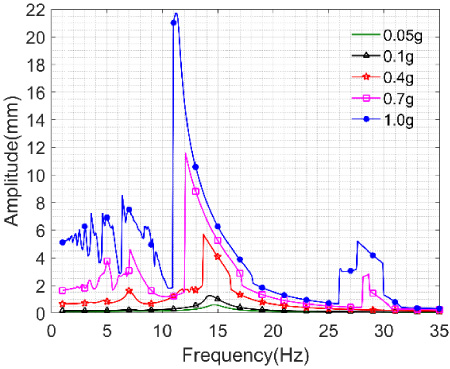
Amplitude-frequency response of the diamagnetic levitation system under different excitation acceleration.
Figure 14 shows the dynamic response behavior of the PG under sinusoidal vibration excitation along the vertical direction. The vibration response of the PG sheet exhibits short-term irregularities in the initial stage and finally enters the stable stage. Under the vibration excitation of 5 Hz and 0.1 g, there is no collision between the PG sheet and the magnetic base, the motion of the PG sheet is single-period in the stable stage. When the acceleration is increased to 1.0 g, the PG sheet starts to make a two-period cycling movement in the stable stage and collides with the magnet array four times in one cycle. Keeping the acceleration constant and adjusting the frequency to 11.6 Hz, the motion of the PG sheet becomes a single-period motion with one collision. However, the movement of the PG sheet becomes a three-period motion with one collision under the vibration excitation of 11.6 Hz and 0.4 g. Therefore, the dynamic response characteristics of the specific diamagnetic levitation system are affected by the external excitation conditions.
Figure 15 shows the relationship between the response amplitude of the PG sheet and the excitation frequency under different accelerations. Under the excitation acceleration of 0.05 g, the PG sheet only vibrates slightly near the equilibrium position, the amplitude-frequency response of the system is similar to that of the linear vibration system, and the maximum amplitude is obtained at the frequency of 14 Hz. When the acceleration is increased to 0.1 g, the response amplitude is also increased, which causes the nonlinearity of the equivalent spring force to be enhanced. Therefore, the amplitude-frequency response curve slopes to the left, which is a typical characteristic of the nonlinear vibration system. With the continuous increase of excitation acceleration, multiple peaks and jump phenomena are observed in the amplitude-frequency curve, and the jump range and the number of peaks increase with the increase of the excitation acceleration. The reason is that the increasing excitation acceleration enhances the collision between the PG sheet and the magnet array.
In this paper, we built a diamagnetic levitation system composed of a NdFeB permanent magnet array and a circular PG sheet. The levitation mechanism of the diamagnetic levitation system is analyzed theoretically, and the key factors that affect the levitation height of the PG sheet are discussed, which mainly include the structure parameters of the PG sheet and ring magnet. Reducing the thickness and diameter of the PG sheet and increasing the outer diameter and thickness of the ring magnet have a positive effect on improving the levitation height, and the levitation height reaches the maximum value when the inner diameter of the ring magnet is equal to the diameter of the PG sheet. The dynamic response characteristic of the diamagnetic system is also studied, and the system exhibits a nonlinear characteristic due to the nonlinear diamagnetic force and the collision between the magnet array and the PG sheet. Under the vertical vibration excitations, the motion of the PG sheet presents different motion states, such as multiple collisions in one cycle, period-doubling motions, and amplitude jump. This study is expected to be used in developing diamagnetic levitation applications, such as energy harvesters, inertial sensors, and actuators.
Footnotes
Acknowledgements
This work was supported by the National Natural Science Foundation of China (12072106 and 51805148), the Key Scientific and Technological Project of Henan Province (202102210288 and 212102210618), the Research Foundation for Advanced Talents of Henan University of Technology (2017BS010 and 2019BS054), and the Fundamental Research Funds for the Henan Provincial Colleges and Universities in Henan University of Technology (2018QNJH04 and 2016RCJH02).