
Abstract
An ultra-compact electric mobility vehicle cannot be equipped with power steering, and the physical burden is large. Therefore, we are continuously researching steering support for an ultra-compact electric mobility vehicle equipped with a steer-by-wire system (SBWS). The SBWS has not been widely diffused because the steering and front wheels are connected only to electric signals and do not have a high redundancy level. However, the advantage of an SBWS is that the steering reaction torque felt through the steering wheel can be controlled freely. We investigated an active steering wheel system (ASWS) that can control an appropriate steering feeling for each driver by being equipped with SBWS and evaluating the steering burden of each driver. So far, research on the SBWS has been considered to improve operability by transmitting road information and feeding back vehicle motion, however few research on an SBWS considers the physical and mental burden on the driver. In this study, we conducted a fundamental analysis of the effect of the steering reaction torque on the steering burden, focusing on the operating direction of the steering wheel.
Keywords
Introduction
Techniques such as throttle-by-wire, brake-by-wire, and steer-by-wire have been established that can electrically operate systems instead of mechanically connecting them. While the conventional automobile operation system has a limited installation location, the by-wire technology has no mechanical connection, so it can be installed at any location. In recent years, a skateboard-type chassis has been developed that can separate the chassis from the interior space by adopting an in-wheel motor. Throttle-by-wire and brake-by-wire systems are widely used in automobiles, but steer-by-wire systems are still unpopular for safety because the steering wheel and front wheels are not redundant. However, steer-by-wire systems are expected to have several advantages. First, because the SBWS does not have a mechanical connection between the front and steering wheels, the steering gear ratio and steering reaction torque control can be freely controlled, and the steering feeling is appropriate for each driver. Second, in level 3 or 4 automatic operations, the driver switches between automatic and manual operation, which has a high affinity for the steer-by-wire system. The following methods have been proposed for steering-support using steer-by-wire. For example, Hiraoka et al. showed that the steering reaction torque in an SBWS has a trade-off relationship between operability and steering burden, but did not mention the appropriate steering reaction torque [1]. In addition, it has been clarified that the steering burden is reduced by decreasing the steering gear ratio and reducing the steering input compared to general vehicles, but the problem is that the vehicle moves sensitively to the steering input and there is a risk of overturning [2–5]. A common point among these previous studies is that the characteristics of the driver affecting the steering reaction torque and steering gear ratio have not been examined. Thus, studies have been conducted on how the whole driver behaves in relation to the vehicle system though, steering assistance that considers the characteristics of each driver has not yet been studied. Our research group installed an SBWS in ultra-compact electric mobility vehicles, and we are continuously studying the control of individual steering. So far, it has been clarified that the steering burden can be reduced by examining the driving position for each physique [7] and that the steering burden due to the steering reaction torque differs for each physique by using two-dimensional burden analysis [8]. Owing to space constraints, ultra-compact electric mobility vehicles cannot be equipped with power steering that assists steering. Therefore, the physical steering burden is heavy and the driving position is restricted and there is a large difference in the steering feeling between drivers. Because such vehicles are used for car-sharing and support for the elderly [6], it has been suggested that various drivers may take turns using them and cause accidents due to excessive steering burden. Therefore, it is necessary to quantify the appropriate steering reaction torque for each driver, but it has not been studied yet. We consider that the steering feeling and burden are different for each driver and propose an active steering wheel system (ASWS) that can support steering by considering the appropriate steering reaction torque control method for each driver. Usually, in research on the steering reaction torque and gear ratio of the steering wheel, the steering sensation is examined by simulating the state of the vehicle. However, research on the steering reaction torque and gear ratio considering the burden on the driver in operating the steering wheel has not been conducted. To quantify the steering reaction torque, the subjective burden is quantified by using analysis using a three-dimensional steering burden model at the same time as subjective evaluation and muscle activity evaluation in this paper.
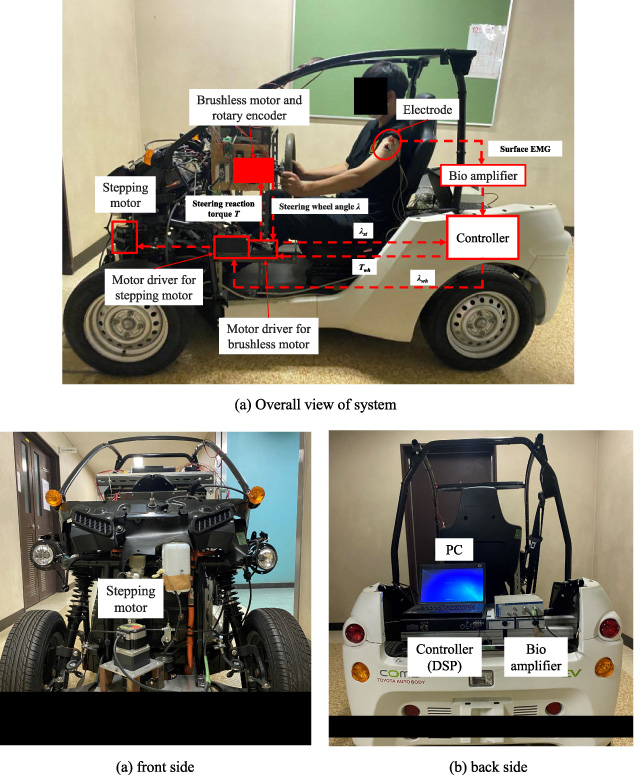
Experimental vehicle equipped with SBWS.
ASWS provides an appropriate steering reaction torque and steering gear ratio by reading the driver’s biological information and estimating the steering burden for each driver. We installed an SBWS in an ultra-compact electric mobility vehicle and built an ASWS (Fig. 1). The brushless motor directly connected to the steering wheel reproduces the steering reaction torque, and the rotary encoder installed coaxially with this motor detects the steering wheel angle. The steering wheel angle 𝜆 st input calculates the front wheel angle 𝜆 wh considering the steering gear ratio by the controller, and is transmitted to the stepping motor to steer the front wheels. The reaction force T wh and steering gear ratio are fed back to the driver by considering the steering burden in real time using surface myoelectricity (EMG) measured by the electrodes attached to the driver’s surface skin. We used ibis, which is a digital signal processor (DSP) manufactured by MIS Industrial Systems, as a controller. It can create Simulink and perform signal processing. Arbitrary steering reaction torque and gear ratio can be set using Simulink loaded into the DSP. In addition, it is possible to consider the steering reaction torque and gear ratio in consideration of the burden on the driver by amplifying the muscle activity of the driver via the bio-amp and processing the signal using the DSP. This study is used to evaluate the physical burden of muscle activity and the mental burden of the subjective evaluation of the effects of various steering reaction torques on multiple drivers.
Steering burden evaluation by physical burden and subjective evaluation
Experimental method
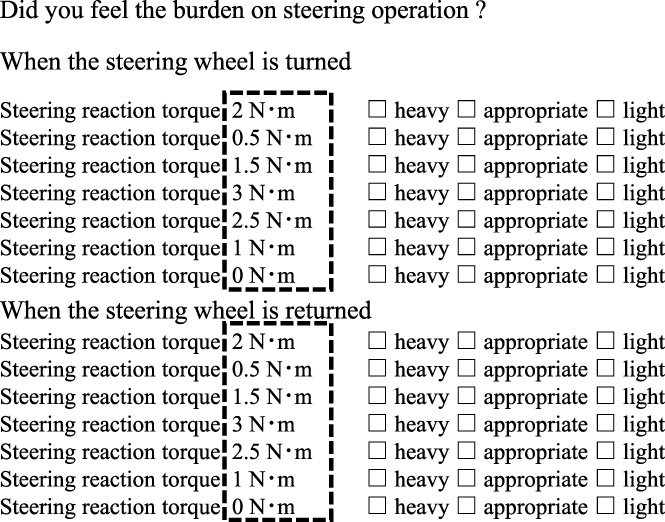
Using ASWS, we investigated the driver’s burden due to the steering reaction torque. In this study, to evaluate the physical and mental burden due to steering reaction torque, the physical burden evaluation by muscle activity by surface EMG and the subjective evaluation using a questionnaire (Fig. 2) is performed. The number of participants was 10 students from our university. They were asked to ride in an experimental vehicle equipped with an ASWS, and the steering wheel was turned back counterclockwise at a speed of 135° per second. Steering reaction torque is performed in seven patterns of 0, 0.5, 1.0, 1.5, 2.0, 2.5, and 3.0 N⋅m three times each. These are burden level tasks that do not leave participants fatigued. To prevent the experimental participants from perceiving the weight of the steering reaction torque, seven patterns were randomly ordered and the area surrounded by the dotted line is hidden without being presented to the experimental participants. The experiment took about 20 min per person.
The questionnaire for subjective evaluation.
EMG is an activity potential that occurs when a muscle contracts, and is generated depending on the degree of muscle contraction. In this study, we measured the anterior deltoid muscle, which shows an active reaction during the steering operation [9]. When surface EMG is used as a means, such as motion analysis, the average amplitude of the EMG signal is the target [10], so the root mean square (RMS) is calculated and evaluated for the recorded EMG waveform. Here, normalization is required because the amount of EMG exerted differs depending on the position where the electrode is attached, type of muscle, and participants in the experiment. Before the experiment, EMG at maximum exertion in each muscle was measured. The EMG at this time is called the maximum voluntary contraction (MVC). By calculating the ratio of MVC (%MVC) from the RMS obtained by the steering experiment, the higher the value of %MVC, the greater the muscle burden. Simultaneously, a questionnaire was created for the subjective evaluation. The answer columns were light, appropriate, and heavy, and seven pattern questions of steering reaction torque was answered.
Results of surface EMG.

Results of surface EMG.
Schematic diagram of steering burden analysis model.
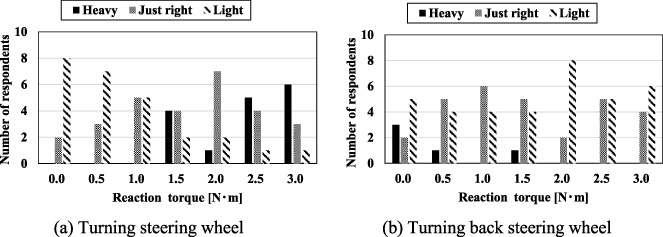
Figure 3 shows the number of respondents for each steering reaction torque, according to the questionnaire. In the result of turning the steering wheel in Fig. 3(a), the answer was divided when the steering reaction torque was 1.5 N⋅m or more, and the largest number of people answered that it was heavy at 3.0 N⋅m. It was found that the subjective burden increased with the steering reaction torque. On the other hand, some experimental participants answered that it was heavy when the steering reaction torque was 0, 0.5, and 1.5 N⋅m when turning back the steering wheel, as shown in Fig. 3(b). Eight people answered that it was light at 2.0 N⋅m and six people answered that it was light at 3.0 N⋅m. This is because the heavier the steering reaction torque when turning back the steering wheel, the more it works to assist the steering operation. To verify this tendency, muscle burden needed to be assessed. Figure 4 shows the muscle burden caused by the %MVC of one participant. In Fig. 4(a), the muscle burden due to %MVC increased owing to the increase in steering reaction torque; however, in Fig. 5(b), the muscle burden decreased owing to the increase in steering reaction torque, which is consistent with the tendency by subjective evaluation. Furthermore, as a result of the subjective evaluation, the increasing tendency due to the steering reaction torque when turning the steering wheel is remarkable, so that agreement with the muscle burden can be confirmed. However, because the answers are sparse at the time of turning back the steering wheel, it is unlikely that the subjective evaluation and muscle burden evaluation match.
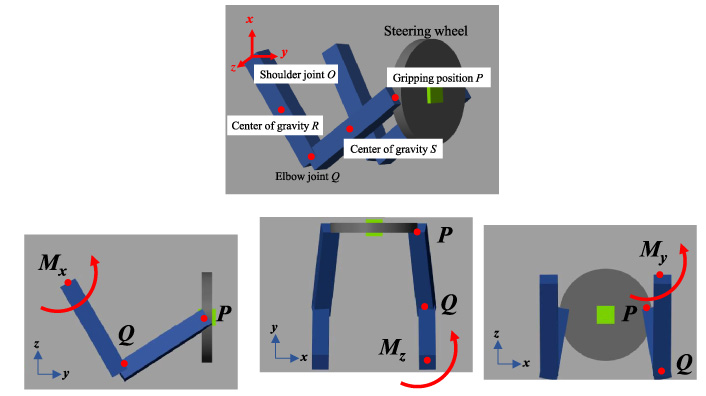
Since it is unlikely that the subjective and muscle burden evaluation will match when turning back the steering wheel, a detailed analysis using the driver’s physique will be performed. Therefore, to predict the degree of burden for each steering reaction torque, we created an upper-limb burden model that considers the driver’s physique, using Simscape, an analysis software manufactured by MathWorks (Fig. 5). Let O be the shoulder joint, Q the elbow joint, and P the position where the steering wheel is gripped. The moment M x is generated in the shoulder joint O when the weight of each of the centers of gravity of the forearm (R) and the upper arm (S), respectively, is applied to the upper limbs, and M x , M y , and M z were calculated using Eq. (1). Where M x , M y , and M z indicate the shoulder joint moments around the x-axis, y-axis, and z-axis, respectively. In addition, x P is the x-coordinate of the steering wheel grip position, y P the y-coordinate of the steering wheel grip position, z P the z-coordinate of the steering wheel grip position, x R the x-coordinate of the center of gravity of the upper arm, y R the y-coordinate of the position of the center of gravity of the upper arm, z R the z-coordinate of the center of gravity of the upper arm, x S the x-coordinate of the center of gravity of the forearm, y S the y-coordinate of the center of gravity of the forearm, z S the z-coordinate of the center of gravity of the forearm, F x the x-axis of steering reaction force component, and F z the z-axis component of steering reaction force. m1 is the mass of the upper arm (kg), m2 the mass of the forearm (kg), and g the gravitational acceleration (m/s2).
Analysis condition
The simulation was performed under the same conditions as the experimental conditions. Additionally, the driving position when the participants were riding on the experimental vehicle was reproduced. The body heights of all participants in this experiment were close to 171.2 cm which is the average body height of Japanese men [11]. Because it was impossible to measure only the weight of the driver’s arm in this study, the driver’s physique was calculated from the ratio of the driver’s weight [12,13].
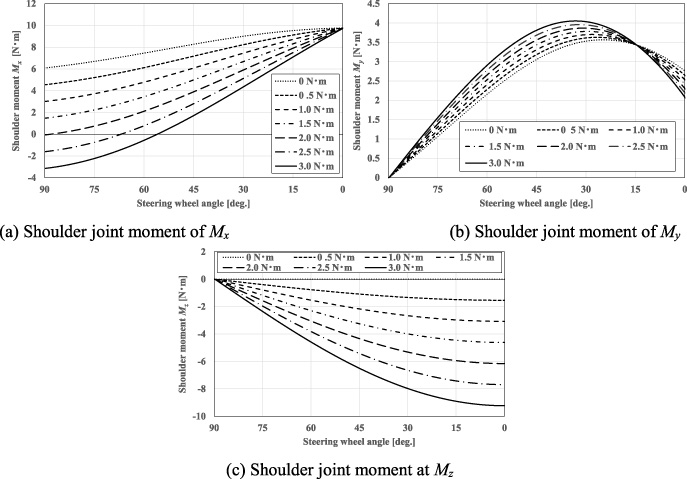
Analysis results of shoulder joint moment.
Figure 6(a), (b) and (c) shows the analysis results for M x , M y and M z . The horizontal axis shows the steering reaction torque and the vertical axis shows the joint moment. In M z , no moment was generated at 0 N⋅m steering reaction torque, it was only generated in the direction of assisting the movement of the shoulder joint at more than 0.5 N⋅m steering reaction torque. So, the greater the steering reaction torque, the less the burden of steering wheel operation. In M y , the shoulder joint moment increased as the steering reaction torque increased, but the relationship reversed to less than 15°. Therefore, the greater the steering reaction torque, the greater the steering burden from 90° to 15°, but the relationship was reversed for less than 15°. In M x , it is considered that the driver feels a steering burden at 90° that is easy to feel the burden when steering reaction torque is less than 1.5 N⋅m because the shoulder joint moment is positive. In addition, the larger the steering reaction torque, the longer the time required for the shoulder joint moment to be more than 0 N⋅m. So, the greater the steering reaction torque, the more drivers felt the steering reaction torque is light when turning back the steering wheel same as the results of subjective evaluation. From these results, the driver feels the steering burden of steering reaction torque is less than 1.5 N⋅m when turning back the steering wheel was matched results of subjective evaluation.
Conclusion
First, the research objective was to build an ASWS system that can provide an appropriate steering reaction torque for each driver. To realize the proposed system, it is necessary to grasp the relationship between steering reaction torque and steering burden. In the research method, the effect of the steering reaction torque was examined by subjective evaluation using a questionnaire, and burden evaluation by muscle activity, or burden analysis. Based on the results of this examination, the burden from the steering reaction torque is different when turning and turning back the steering wheel. The smaller the steering reaction torque, the greater the physical burden is when turning back the steering wheel. It was confirmed that the steering reaction torque was generated in the shoulder joint at less than 1.5 N⋅m in M x , and the driver felt a steering burden in the subjective evaluation and burden analysis. In summary, a steering reaction torque of less than 1.5 N⋅m may increase the steering burden when turning back the steering wheel. We aim to reduce the steering burden by using a steering reaction torque of 1.5 N m or more when turning back the steering wheel for ASWS control.
In the future, we will increase the number of participants to examine the steering burden felt by more drivers with characteristics in detail. And also, using physique as a parameter, we will compare the subjective evaluation and burden analysis for other types of participants with different arm conditions each physique, and examine the effect on the steering burden.