
Abstract
Studying the nonlinear dynamic characteristics of multi-field coupling of the giant magnetostrictive actuator (GMA) is one of the main ways to improve its output performance. Because of the problem that its multi-field coupling nonlinear dynamic characteristics are difficult to accurately describe, the multi-field coupled nonlinear dynamic model of GMA and two-dimensional micro-positioning workbench is established according to the Jiles–Atherton hysteresis model, magnetostrictive model, hysteresis nonlinear magnetic equation and the structural dynamics principle of GMA, respectively. The influence of equivalent damping coefficient, equivalent stiffness, and equivalent mass on the dynamic characteristics of each model is analyzed, and finally, the constructed model and the obtained law are experimentally verified. The results show that the displacement curve calculated by the model is consistent with the experimentally measured displacement curve, the influence of the equivalent damping coefficient, equivalent stiffness, and equivalent mass on the dynamic characteristics of the model measured by the experiment is consistent with the simulation analysis results, and the maximum error of the output displacement is 1.779 um, which verifies the correctness of the model. The research results provide a theoretical basis for improving the dynamic characteristics of GMA and improving the output performance of two-dimensional micro-positioning workbenches.
Keywords
Introduction
Giant magnetostrictive material (GMM) is a new type of material that developed rapidly in the last century, because of its high compressive strength, high bearing capacity, working frequency bandwidth, energy density, and other advantages, so it is regarded as a strategic functional material in the 21st century to improve a country’s comprehensive competitiveness in high technology [1,2]. Since the length of the GMM rod itself will change greatly under the action of the magnetic field, which will output force and displacement to the outside world, the GMA developed based on GMM is to use the GMM rod as the core component to realize the conversion of magnetic energy to mechanical energy [3]. Compared with piezoelectric ceramic drives, the positioning workbench with GMA as the driving device has better stability, faster response speed, and higher positioning accuracy [4–6]. However, due to the strong multi-field coupling nonlinear characteristics, hysteresis characteristics, and complex dynamic characteristics of GMM, the output stability of GMA is seriously affected, and the application of GMA in precision drive, electro-hydraulic servo valve, vibration control, and other aspects are limited. In response to the problem of improving the stability of GMA, many researchers have also carried out relevant research. ZHU et al. considered the dynamic magnetization model with an eddy current effect [7]. ZENG et al. established a nonlinear dynamic model of GMA to show that increasing the damping coefficient can improve the stability of the system output, and when the stiffness of the system is low, chaos will occur [8]. Terfenol-D abstracts a sensing system to compensate for measurement errors caused by temperature drift [9]. Liu Huifang et al. analyzed the influence of energy loss and preload on system characteristics [10]. Wang Hanyu et al. conducted thermal characteristic analysis and thermal deformation compensation method research on GMA developed GMA with thermal compensation function and significantly improved the performance index of GMA [11]. ZHOU et al. studied the static and dynamic characteristics of GMA considering the prestressing effect of GMM rods and proposed a magnetostrictive model that relies on GMM rod prestress [12]. Yan Hongbo et al. studied the motion state of the system under different parameter conditions by establishing a nonlinear mathematical model of GMA [13]. However, most of the current research on improving the stability of the nonlinear dynamic system of GMA hysteresis focuses on the control strategy and hysteresis compensation control [14,15], and only considers the dynamic characteristics of GMA in a single direction, and lacks complete theoretical guidance for the dynamic performance and output performance changes caused by the structural design parameters of the two-dimensional micro-positioning workbench based on GMAs.
In order to solve the above problems, this paper studies the multi-field coupling nonlinear dynamic characteristics of the two-degree-of-freedom micro-positioning workbench based on GMAs as the object. For a detailed description, the structure and working principle of a two-dimensional micro-positioning workbench based on GMAs are introduced in Section 2. In Section 3, based on the Jiles–Atherton hysteresis model, magnetostrictive model, hysteresis nonlinear magnetic equation, and structural dynamics principle, a multi-field coupled nonlinear dynamic model of the two-dimensional micro-positioning workbench is established, and the influence of the equivalent damping coefficient, equivalent stiffness and equivalent mass of the system on the dynamic characteristics of the table is studied in Section 4. In the Section 5, an experimental test platform for the output characteristics and dynamic characteristics of the two-dimensional micro-positioning workbench is built to verify the correctness of the established multi-field coupled nonlinear dynamic model. Section 6 of this article is the concluding part.
Structure and working principle of the workbench
The internal structure of GMA is shown in Fig. 1, which is mainly composed of the device base, coil, GMM rod, shell, disc spring, magnetic conductive block, and output shaft. The working principle of GMA is that the GMM rod is deformed by magnetostriction in the magnetic field domain generated by the energized coil, and then outputs displacement and force to the outside world through the output rod, and the displacement and output force can be controlled by changing the size of the current in the coil.

Structural diagram of GMA.
The structure of the GMA-based two-dimensional micro-positioning workbench is shown in Fig. 2 [16], which is mainly composed of X-oriented GMA, Y-oriented GMA, flexible hinge bearing platform, and other components, and the placement positions of the two GMAs are perpendicular to each other and act together on the same external load.
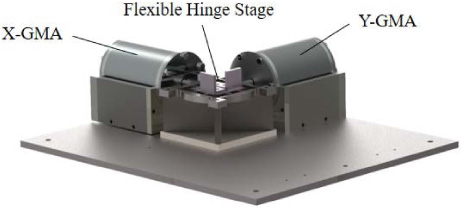
Schematic diagram of the structure of the two-dimensional micro-positioning workbench.
Its working principle is: input the coordinate value of the ideal point (x 0, y 0) through the host computer program, find the current value (I x , I y ) required by X-GMA, Y-GMA respectively according to the inverse model, and then collect the displacement of the micro-positioning workbench in the X and Y directions in real-time through the displacement sensor, and realize the closed-loop adjustment control of the output displacement through the PID control strategy, and finally realize the precision positioning function of the workbench.
Hysteresis model of GMA
In GMA, due to the irreversible magnetization process of ferromagnetic materials, the magnetic hysteresis leads to hysteresis and forms a hysteresis loop, which in turn makes the hysteresis nonlinear between the input magnetic field and the output magnetization of GMM. The Jiles–Atherton model is a hysteresis model based on the domain wall theory of ferromagnetic materials [17]. Therefore, based on the Jiles–Atherton model, the hysteresis model of GMA is established by reference [18], in which the relationship between the applied magnetic field strength H and the magnetization intensity M can be expressed as:
According to the literature [19], under the condition of a certain magnetic field strength, the relationship between the magnetostrictive strain 𝜆 of the GMM rod and the magnetization strength M satisfies:
Since the hysteresis model of GMA is based on the Jiles–Atherton model, there are a total of 6 parameters that need to be identified in the displacement model of the GMA, namely θ = (M s , 𝛼, k, a, c, 𝛾). When conducting analysis, it is necessary to know the values of each parameter in the hysteresis model, and the results of the PSO-AF parameter identification optimization algorithm are quoted here [16], and the values of each parameter are shown in Table 1.
Drive hysteresis model parameter values
According to Table 1, and using Eqs (1)–(2), the numerical solution of M and 𝜆 under the action of H can be obtained.
Based on the structure and working principle of GMA, GMA can be approximated as GMM rod in the length direction is composed of a single degree of freedom separation element spring, damper, mass, considering the pressure connection stiffness, the load (including disc spring, output rod, mass load) is a mass-spring-damping type load [20], during the entire movement, one end of the GMM rod is displaced, and the other end always maintains the same displacement, velocity, acceleration as the mass load.
Let K r , C r , and M r be the equivalent stiffness coefficient, equivalent damping coefficient, and equivalent mass of GMM rods, respectively; K t , C t , and M t are the equivalent stiffness coefficient, equivalent damping coefficient, and equivalent mass of the load, respectively. In summary, a schematic diagram of the equivalent kinetic system of GMA as shown in Fig. 3 is established.

Schematic diagram of the dynamic structure of GMA.
According to GMM rod characteristics and references [20], the nonlinear magnetic equations for mass and damping are:
Where: ϵ is the total strain, E H is Young’s modulus, σ is stress, 𝜆 is magnetostrictive strain, L is length, 𝜌 is mass density, and C D internal damping coefficient of the GMM rod.
From the schematic diagram of the dynamic structure of GMA, it can be seen that the force of load M
t
on GMM rod F
t
and the force F
q
(that is, the output force of GMA) of GMM rod on the load are a pair of interacting forces, equal in magnitude and opposite direction, namely:
Considering also that GMM rods are prestressed σ0 by preload screws and disc springs, according to Newton’s second law, the output force of GMM rods is F = −(F
q
+ σ0 A), namely:
From the strain ϵ = x∕L
, Eqs (3) and (5) are combined to obtain the dynamics equation of GMA:
In the equation:
Applying the Laplace transform to Eq. (6), the output displacement model of GMA is:
Considering that GMM rods are always prestressed σ0 by preload screws and disc springs, the final output displacement (measured value of the displacement sensor) of GMA relative equilibrium is:
From Eq. (8) and Eq. (10), the mechanical resonance frequency f and mechanical damping ratio 𝜉 of GMA are:
From Eq. (10), the output displacement-magnetostrictive strain model of GMA is:
Applying Eq. (4) to the Laplace transform, the output displacement-output force model of GMA is obtained:
Substituting Eq. (13) into Eq. (14), the output force-magnetostrictive strain model of GMA is:
From the overall structure and working principle of the two-dimensional micro-positioning workbench, the two-dimensional micro-positioning workbench is mainly composed of X-GMA, Y-GMA, and a two-dimensional flexible hinge bearing workbench, which can be obtained from Eq. (13), and the two-dimensional output displacement-magnetostrictive strain model of GMA is:
From Eq. (15), the two-dimensional output force-magnetostrictive strain model of GMA is:
It can be seen from the literature [10] that the dynamic equation of the two-dimensional flexible hinge-bearing workbench in the X and Y directions is:
In the formula: M 1 and M 2 are the mass of the flexible hinge unit and the bearing workbench, kg; x, y are the displacement of the positioning workbench in the X and Y directions, m; C is the overall damping coefficient of the flexible hinge bearing workbench; K is the static stiffness of the flexible hinge bearing workbench, F is the unidirectional force of the flexible hinge bearing workbench, N.
After performing the Laplace transform on Eq. (18),
The one-way transfer function G
h
can be obtained from Eq. (19):
According to the two-dimensional dynamic model of GMA and the dynamic model of the two-dimensional flexible hinge bearing workbench established above, the schematic diagram of the dynamic structure of the two-dimensional micro-positioning workbench is shown in Fig. 4.

Schematic diagram of the dynamic structure of the two-dimensional micro-positioning workbench.
From the structure, it can be seen that the motion in the X and Y directions of the system does not affect each other and is independent of each other, and the output displacement-magnetostrictive strain model of the two-dimensional micro-positioning workbench can be obtained from Eqs (16) and (20) is:
From Newton’s second law and Eq. (17), the acceleration-magnetostrictive strain model of the two-dimensional micro-positioning workbench is:
From Eqs (13), (15), Eqs (20), and (21), it can be seen that under the condition that the equivalent stiffness coefficient K r , equivalent damping coefficient C r , and equivalent mass M r of GMM rods are unchanged, the dynamic characteristics of the system are mainly related to the equivalent stiffness coefficient K t , equivalent damping coefficient C t , and equivalent mass M t of the load.
In order to analyze the dynamic response process of the two-dimensional micro-positioning workbench, after establishing its dynamic model, the dynamic simulation models of GMA and two-dimensional micro-positioning workbench are built through the MATLAB simulation platform, and the effects of the equivalent damping coefficient C t , equivalent mass M t and equivalent stiffness K t of the load on the dynamic characteristics of the system are analyzed, and the simulation parameters are selected as shown in Table 2 below.
Load parameters of system dynamic characteristics simulation
Load parameters of system dynamic characteristics simulation
In order to analyze the dynamic characteristics of GMA, the output displacement-magnetostrictive strain model and the output force-magnetostrictive strain model were used as evaluation indicators. The 𝜆 value of the input step signal of both is taken as 1 to study the effects of the equivalent damping coefficient, equivalent mass, and equivalent stiffness of the load on the dynamic characteristics of the two models.
Equivalent damping coefficient
From Eq. (12), it can be seen that the damping ratio is proportional to the equivalent damping coefficient. To study the influence of the equivalent damping coefficient C t of the load on the dynamic characteristics of the two models, the equivalent mass M t of the load is taken as 0.5 kg, the equivalent stiffness K t is taken as 107 m/N and remains unchanged, the damping ratio 𝜉 t of the load is increased in turn, and the step response curves of the two models when the damping ratio 𝜉 of the load is increased from 0 to 0.8 is studied. The step response curves of the output displacement-magnetostrictive strain model and the output force-magnetostrictive strain model of GMA are shown in Fig. 5(a) and (b), respectively.
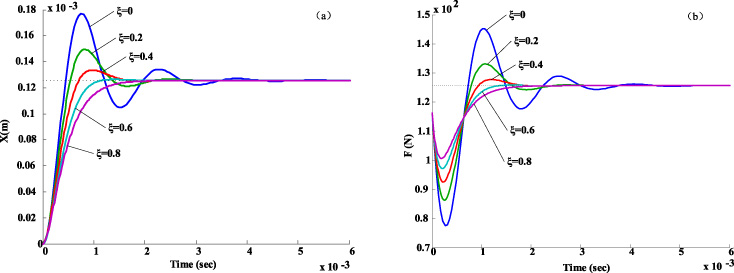
Step response curve of the system at different damping ratios (a) output displacement-magnetostrictive strain model step response curve (b) output force-magnetostrictive strain model step response curve.
As can be seen from Fig. 5(a), when the load damping ratio 𝜉 gradually increases, the oscillation amplitude of the output displacement curve of the GMA decreases, the maximum overshoot decreases, and the adjustment time required decreases, but the time to reach the required displacement increases slightly. From this, it can be concluded that by increasing the load-damping ratio, although the response speed of GMA is slowed down, the stability of the system becomes better. When the load damping ratio 𝜉 is 0.6, the response time to achieve the required displacement is only 1 × 10−3S while there is almost no overshoot. It can be seen from Fig. 5(b) that when the load damping ratio 𝜉 gradually increases, the decreased amplitude and rise amplitude of the output force curve of GMA are significantly reduced, indicating that increasing the load damping ratio can effectively suppress the fluctuation of GMA output force. When the load damping ratio 𝜉 is 0.6, not only the fluctuation of the output force is reduced, but also the response time of the system to achieve the required displacement is not greatly increased.
In engineering, the damping ratio of the second-order system is generally selected between 0.4 ∼ 1, so it can be seen from the comprehensive Fig. 5 that when the damping ratio 𝜉 is 0.6, the output displacement and output force of GMA obtain a more ideal unit step response curve, and the corresponding load equivalent damping coefficient C t is 3.84 × 103 Ns/m.
In order to study the influence of the equivalent mass M t of the load on the dynamic characteristics of the two models, the equivalent damping coefficient C t of the load is taken as 3.84 × 103 Ns/m, the equivalent stiffness K t of the load is taken as 107 m/N and remains unchanged, the equivalent mass M t of the load is increased in turn, and the step response curve of the two models when the equivalent mass of the load is increased from 0 kg to 2.0 kg is studied. The step response curves of the output displacement-magnetostrictive strain model and the output force-magnetostrictive strain model of GMA are shown in Fig. 6(a) and (b), respectively.

Step response curve of the system at different equivalent masses (a) Output displacement-magnetostrictive strain model step response curve (b) Output force-magnetostrictive strain model step response curve.
Two points can be seen in Fig. 6(a), one is that when the load equivalent mass M t gradually increases, the maximum overshoot of the output displacement of GMA gradually increases, but the adjustment time of the required displacement does not change much, indicating that the stability of GMA is reduced while responding quickly. Second, when the load mass M t reaches a certain value, the output displacement curve of GMA will produce an overshoot, indicating that there is a maximum load mass M t between 0.5 kg ∼ and 1.0 kg so that the output displacement of GMA is in a critical state of overshoot phenomenon. It can be seen from Fig. 6(b) that when the load equivalent mass M t is increased, the output force of GMA fluctuates, and with the increase of the load equivalent mass M t , the GMA output force begins to overshoot, and the adjustment time of the system to reach the required force stably becomes longer, indicating that the load mass is increased, the stability of GMA decreases, and the time required to reach steady state increases.
In order to study the influence of the equivalent stiffness K t of the load on the dynamic characteristics of the two models, the equivalent mass M t of the load is taken as 0.5 kg and the equivalent damping coefficient C t is taken as 3.84 × 103 Ns/m and remains unchanged, the equivalent stiffness K t is increased sequentially, and the step response curves of the two models when the equivalent stiffness of the load is from 1 × 107 Ns/m∼8 × 107 Ns/m. The step response curves of the output displacement-magnetostrictive strain model and the output force-magnetostrictive strain model of GMA are shown in Fig. 7(a) and (b), respectively.
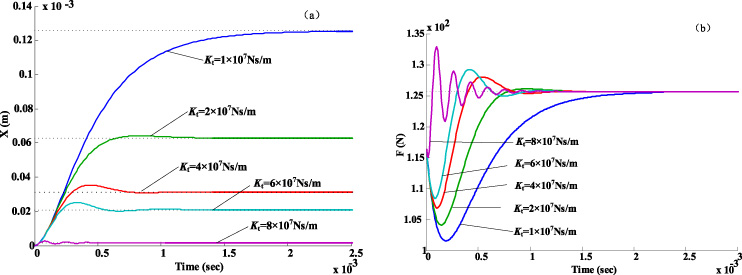
Step response curve of the system at different equivalent stiffness (a) output displacement-magnetostrictive strain model step response curve (b) output force-magnetostrictive strain model step response curve.
Two points can be seen in Fig. 7(a), one is that when the equivalent stiffness of the load is in the range of 1 × 107 Ns/m∼6 × 107 Ns/m when the equivalent stiffness K t of the load gradually increases, the amplitude of the output displacement curve of GMA decreases, but the maximum overshoot increases, indicating that not only the output displacement of GMA decreases, but the stability of the system is also reduced. Second, when the load equivalent stiffness K t reaches a certain value in the range of 1 × 107 Ns/m∼2 × 107 Ns/m, the output displacement curve of GMA will produce an overshoot phenomenon, indicating that there is a critical value of the equivalent stiffness K t of the load so that the GMA output displacement does not overshoot. It can be seen from Fig. 7(b) that when the load equivalent stiffness K t gradually increases, the output force adjustment time of GMA is shortened, and when K t reaches a certain value in the range of 1 × 107 Ns/m∼2 × 107 Ns/m, the overshoot phenomenon begins to occur, and as K t further increases, the output force of GMA fluctuates seriously, indicating that there is an optimal load equivalent stiffness K t value in the GMA system so that the system has the shortest adjustment time and the best stability.
In order to analyze the dynamic characteristics of the two-dimensional micro-positioning workbench, the output displacement-magnetostrictive strain model and the acceleration-magnetostrictive strain model were used as evaluation indexes about the dynamic characteristics of GMA. The 𝜆 value of the input step signal of both is taken as 1 to study the influence of the equivalent damping coefficient, equivalent mass, and equivalent stiffness of the load on the dynamic characteristics of the two models.
Equivalent damping coefficient of the load
In order to study the influence of the equivalent damping coefficient C t of the load on the dynamic characteristics of the two models, the equivalent mass M t of the load is taken as 0.5 kg, the equivalent stiffness K t is taken as 107 m/N and remains unchanged, and the load damping ratio 𝜉 is increased sequentially, and the step response curves of the two models when the load damping ratio 𝜉 is increased from 0 to 0.8 is studied. The step response curves of the output displacement-magnetostrictive strain model and acceleration-magnetostrictive strain model of GMA are shown in Fig. 8(a) and (b), respectively.
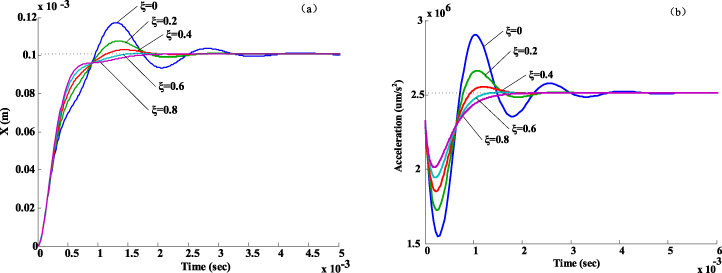
Step response curve of two-dimensional micro-positioning workbench at different load damping ratios. (a) Output displacement-magnetostrictive strain model step response curve. (b) Acceleration-magnetostrictive strain model step response curve.
It can be seen from Fig. 8(a) that when the load damping ratio 𝜉 gradually increases, the changing trend of the output displacement curve of the two-dimensional micro-positioning workbench is consistent with the changing trend of the GMA output displacement curve in Fig. 5(a), but the amplitude changes, indicating that the dynamic characteristics of the output displacement of the two-dimensional micro-positioning workbench are only related to the dynamic characteristics of the GMA output displacement, while the two-dimensional flexible hinge bearing platform only plays the role of transmitting displacement, and its dynamic characteristics have almost negligible influence on the dynamic characteristics of the two-dimensional micro-positioning workbench. It can be seen from Fig. 8(b) that when the load damping ratio 𝜉 gradually increases, the acceleration change trend of the two-dimensional micro-positioning workbench is consistent with the changing trend of GMA output force in Fig. 5(b), indicating that the starting performance of the two-dimensional micro-positioning workbench is related to the output force performance of GMA. It can be seen in Fig. 8 that when the damping ratio 𝜉 of the load is 0.6, not only the output displacement does not produce an overshoot phenomenon, the acceleration fluctuation is stable, and the response speed is relatively fast.
In order to study the influence of the equivalent mass of the load on the two models, the equivalent damping coefficient C t of the load is taken as 3.84 × 103 Ns/m, the equivalent stiffness K t is taken as 107 m/N and remains unchanged, the value of the equivalent mass M t of the load is increased in turn, and the step response curves of the two models when the equivalent mass M t of the load is increased from 0.5 kg to 2.5 kg are studied. The step response curves of the output displacement-magnetostrictive strain model and acceleration-magnetostrictive strain model of the two-dimensional micro-positioning workbench are shown in Fig. 9(a) and (b), respectively.

Step response curve of the two-dimensional micro-positioning workbench with different equivalent masses (a) output displacement-magnetostrictive strain model step response curve (b) acceleration-magnetostrictive strain model step response curve.
It can be seen from Fig. 9(a) that when the load equivalent mass M t increases, the fluctuation range of the output displacement of the two-dimensional micro-positioning workbench becomes larger, but the value at stable time is the same, indicating that the equivalent mass of the load has a greater influence on the fluctuation of the output displacement of the two-dimensional micro-positioning workbench, but has a small impact on the steady-state value. It can be seen from Fig. 9(b) that when the load equivalent mass M t increases, the oscillation amplitude of the acceleration curve of the two-dimensional micro-positioning workbench decreases, but the acceleration at a stable time decreases significantly, indicating that the equivalent mass of the load has a great influence on the acceleration amplitude of the two-dimensional micro-positioning workbench, that is, the larger the load equivalent mass, the smaller the maximum acceleration generated by the workbench.
In order to study the influence of the equivalent stiffness of the load on the two models, the load equivalent mass M t is taken as 0.5 kg, the load equivalent damping coefficient C t is taken as 3.84 × 103 Ns/m and remains unchanged, the value of the load equivalent stiffness K t is increased sequentially, and the step response curves of the two models when the load equivalent stiffness K t is from 1 × 107 Ns/m∼8 × 107 Ns/m are studied. The step response curves of the output displacement-magnetostrictive strain model and acceleration-magnetostrictive strain model of the two-dimensional micro-positioning workbench are shown in Fig. 10(a) and (b), respectively.

Step response curve of two-dimensional micro-positioning workbench at different equivalent stiffness (a) step response curve of output displacement-magnetostrictive strain model (b) step response curve of acceleration-magnetostrictive strain model.
It can be seen from Fig. 10(a) that the load equivalent stiffness value mainly affects the overshoot of the output displacement of the two-dimensional micro-positioning workbench and the response time, the greater the load equivalent stiffness, the shorter the response time required, but the overshoot of the output displacement of the table increases, and the stability of the system is worse. It can be seen from Fig. 10(b) that the equivalent stiffness of the load has little effect on the stability value of the acceleration of the two-dimensional micro-positioning workbench, but has a greater influence on the stability of the acceleration, and it can be seen from its step response curve that when the equivalent stiffness of the load increases, the fluctuation frequency of the acceleration begins to increase. However, there is also an optimal load equivalent stiffness in the range of 1 × 107 Ns/m∼2 × 107 Ns/m, which makes the stability of the micro-positioning workbench the best.
It can be seen that the equivalent damping coefficient, equivalent mass, and equivalent stiffness of the load have a certain influence on the output displacement and acceleration of the system, and there is a certain value to make the output displacement and acceleration of the system reach the best state.
Validation of the dynamic model
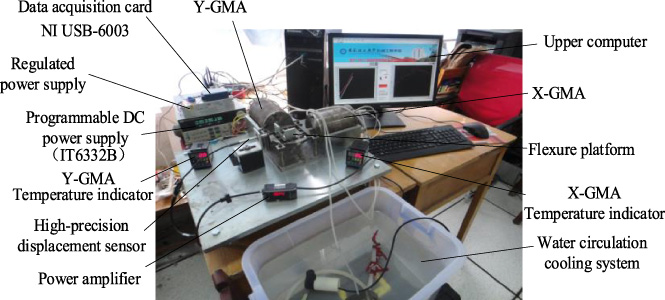
In order to verify the correctness of the constructed dynamic model, the performance test platform of the two-dimensional micro-positioning workbench as shown in Fig. 11 is built, which is mainly composed of IT6332B three-channel programmable high-precision DC power supply, X-direction GMA, Y-direction GMA, flexible hinge bearing platform, NI USB-6003 data acquisition card, GT2-P12K high-precision displacement sensor, water circulation cooling system, and computer. The two GMAs are positioned perpendicular to each other and act together on the same external load.
The output displacement of the two-dimensional micro-positioning workbench under the action of driving current (0A∼6A∼0A) was experimentally tested, the measured experimental data were compared with the results calculated by the dynamic model, and the contrast curve shown in Fig. 12 was obtained. Since the micro-positioning workbench developed in this paper contains two actuators, X-direction GMA and Y-direction GMA, and the structure and performance of both are similar, the experiments take X-direction GMA as test objects, and the parameters involved in model calculation refer to the literature [16].
Output performance test experimental platform of two-dimensional micro-positioning workbench.

Comparison of simulated displacement and experimental displacement.
It can be seen from Fig. 12 that the experimental results of the output displacement of the two-dimensional micro-positioning workbench are compared with the theoretical calculation value: its maximum error is 1.779 μm, and with the increase of current, the error increases, which may be caused by the theoretical model not considering the influence of temperature on the output characteristics of the GMM rod; in addition, the lift and return output displacements of the two-dimensional micro-positioning workbench do not coincide, that is, there is a return error, which is consistent with the nonlinear characteristics of the GMM rod. In summary, although there is a slight difference between the simulated displacement curve and the experimental displacement curve, considering the ambient temperature, the uncertainty of some parameters of the system, and the estimation error, it can be considered that the two-digit shift curve is consistent. It is proved that the built model can reflect the actual situation well, to verify the correctness of the model.
In order to verify the correctness of the influence of the equivalent damping coefficient, equivalent mass, and equivalent stiffness coefficient of the load on the dynamic characteristics of the micro-positioning workbench, an experimental test platform for the dynamic characteristics of the two-dimensional micro-positioning workbench as shown in Fig. 13 was built.
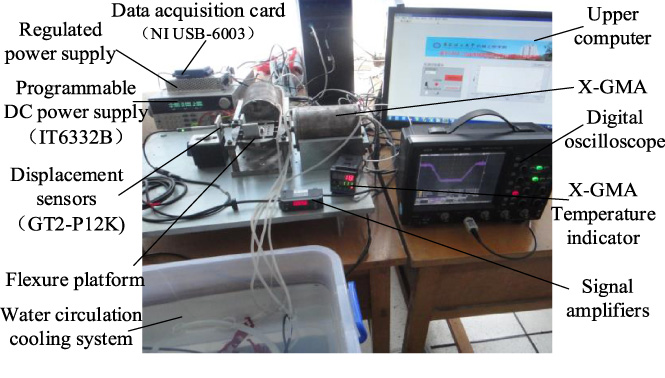
Dynamic characteristics experimental test platform of two-dimensional micro-positioning workbench.
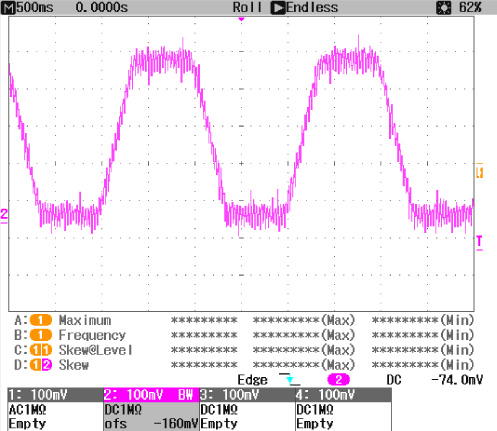
Response time curve of a two-dimensional micro-positioning workbench.
It can be seen from Fig. 14 that the two-dimensional micro-positioning workbench runs smoothly when positioning, without overshoot, swing, and other phenomena, indicating that the system has good dynamic response characteristics, thus verifying the correctness of the influence of the load equivalent damping coefficient, equivalent mass and equivalent stiffness coefficient on the dynamic characteristics of the micro-positioning workbench in the simulation analysis.
Based on the Jiles–Atherton hysteresis model, combined with the magnetostrictive model, hysteresis nonlinear piezomagnetic equation, and the structural dynamics principle of GMA, this paper establishes the dynamic model of GMA and two-dimensional micro-positioning workbench respectively, and uses MATLAB software for simulation analysis, and analyzes the effects of the equivalent damping coefficient, equivalent stiffness and equivalent mass of the load on the output displacement-magnetostrictive strain model and the output force-magnetostrictive strain model of GMA and the influence of the output displacement-magnetostrictive strain model and acceleration-magnetostrictive strain model of the two-dimensional micro-positioning workbench. As verified by experiments, the following conclusions are drawn: Considering the influence of temperature on the output characteristics of the GMM rod and the nonlinear characteristics of the GMM rod, it can be seen that the displacement curve calculated by the model and the displacement curve measured by the experiment are consistent, which proves that the built model can better reflect the actual situation and verify the correctness of the model. Through the dynamic simulation analysis of the system, the effects of the equivalent damping coefficient, equivalent mass, and equivalent stiffness coefficient of the load on the dynamic response of the system are studied, especially the speed and stability of the system. And the equivalent damping coefficient, equivalent mass, and equivalent stiffness of the load have the best value so that the system has the function of fast response without overshoot. Experiments will continue at a later stage to analyze the specific values of the three parameters. Considering the uncertainty of some parameters of the system and the deviation of estimation, through the simulation comparison and analysis of the four mathematical models, it is known that when the damping ratio 𝜉 is 0.6, that is, the equivalent damping coefficient C
t
is 2.012 × 103 Ns/m, a more ideal unit step response curve can be obtained; The relationship between the design parameters and response performance of the drive is mastered, which provides a theoretical basis for the optimization and selection of parameters in the later stage and the design of a more reasonable GMM structure.
Footnotes
Funding
This work was supported by the National Natural Science Foundation of China (grant no. 52105042), the China Postdoctoral Science Foundation (grant no. 2019M652159), and the Anhui Provincial Natural Science Foundation (grant no. 2008085QE214).