
Abstract
Focusing on the applications of wireless sensor networks in marine environment monitoring, a localization algorithm in underwater wireless sensor networks with self-healing (SHLA) was proposed.The algorithm adopt the k-node overlay algorithm to elect some nodes as anchors, so as to make maximum common sensor nodes covered by four anchor nodes. The normal nodes adopt the location coordinate of the anchor node to locate the position, and then the nodes transmit the monitored environmental information and their coordinate information to the surface buoy. In order to avoid reducing the localization coverage and localization accuracy due to anchor nodes failure in underwater wireless sensor network, the node remedial positioning measures is adopted to reduce the effects of nodes failure in the localization algorithm, and locating the covered common nodes by locating other nodes instead of low-energy or ineffective anchor nodes. According to the simulation, this algorithm can effectively improve the localization coverage, relieve the impact caused by anchor nodes failure and prolong the network life at the time.
Keywords
Introduction
Underwater Wireless Sensor Network (UWSN) is a kind of Wireless Sensor Network (WSN), which consists of a variety of underwater sensor nodes, underwater autonomous aircraft and base stations, these nodes can sense certain signals within their coverage and pass the signals locally to the desired user [1]. According to the different types of sensor nodes, we can collect the hydrological data such as temperature of water environment, pressure, salinity and PH and so on, so as to complete many tasks such as environmental management, resource protection, disaster monitoring, military intelligence and so on, and the implementation of these applications need to grasp the location information of nodes in advance [2]. When the sensor nodes are deployed in water, they are moved due to the influence of factors such as water flow, underwater disturbance or collision of water animals and so on, so it is difficult to determine the location of nodes in real time. Moreover, it is necessary to the Coordinate information of the reference nodes when the normal nodes are positioned, when a few ordinary nodes in UWSN move to outside the communication scope of all the reference nodes because of external interference, these nodes can not be positioned, and they become isolated nodes. Therefore, how to overcome the movement problem of nodes in complex water environment, to locate isolated nodes from the scope of reference nodes communication, and to improve the location coverage of underwater wireless sensor network nodes are the focus of the study [3].
Trilateral positioning method.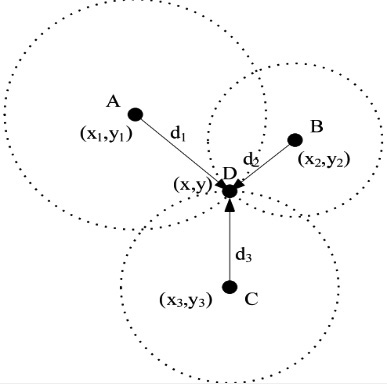
In the study of static underwater sensor networks, in view of nodes localization, the researchers turn three-dimensional positioning into two-dimensional positioning, and the traditional node positioning algorithms such as Time of Arrival (TOA), Received Signal Strength Indication (RSSI) and Angle of Arrival are used to calculate node coordinates in XOY firstly, then the
Trilateral ranging algorithm model
Trilateral measurement method is a more extensive positioning method in practical applications, the principle has shown in Fig. 1. The distances
Quadrilateral positioning model.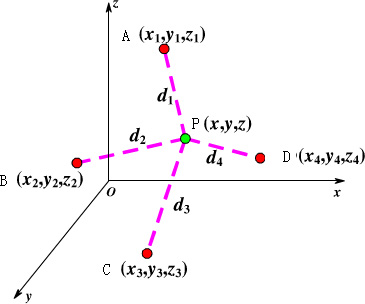
The coordinates
However, when the measurement distances are not accurate by three-sided measurement method, and there are more than one intersection or there are no intersection between the three circles, so it is impossible to achieve accurate positioning of unknown nodes. In order to further improve the accuracy of the algorithm based on distance measurement, the quadrilateral ranging algorithm is adopted.
In order to further improve the positioning accuracy, the four-edge ranging positioning algorithm is adopted, that is, on the basis of the three sides ranging, then a anchor node is added to participate in positioning, it has shown in Fig. 2. At the same time, we know that three points in the space can determine a plane. If we know the coordinates of the three anchor nodes and the distance to the unknown nodes, we can determine the coordinates of two unknown points, which are symmetrical on both sides of the plane. If we know the coordinate of a point and the distance to the unknown nodes, we can determine the coordinates of unknown nodes. Therefore, we can determine the coordinate of an unknown node in the three-dimensional space, and the location information of the four anchor nodes and the distance from the unknown nodes to their distance should be known, so this positioning method is called the quadrilateral measurement method.
Assuming that the coordinate of the unknown node P is
According to Eq. (3), the coordinate of the unknown node P can be calculated as follows:
Underwater environmental structure model has shown in Fig. 3, there are two different types nodes that they are sensor nodes and surface buoys in the model. Sensor nodes are randomly distributed in the target area, all nodes are the same, anchor nodes and ordinary nodes are not differentiated too, and then a part of nodes are selected to anchor nodes through the K-node coverage algorithm. Assume that the nodes are randomly distributed in different depths of the water according to the density situation, so that the nodes are randomly distributed in the three-dimensional underwater environment. The water buoy is randomly anchored in the target area of water surface, and its own position can be obtained by GPS device. Because of the sufficient energy, the information transmitted by sensor nodes can be collected and processed in the algorithm.
The algorithm of underwater wireless sensor network localization with self-repair capability is proposed, which mainly includes the underwater positioning algorithm of electing anchor nodes and the self-repairing localization algorithm based on anchor nodes failure. The positioning algorithm of selecting anchor nodes mainly includes positioning anchor nodes, positioning common sensor nodes and information transmission. When anchor nodes fail or drift to the sparse area of nodes, and can not be located due to the lack of location information, Nodes broadcast a signal that can not be positioned. When located nodes receive the signal that can not be located, whether it has the qualification to be converted into reference node or not, it is forced to be converted to reference node, in order to help nodes location, and each of the located nodes in the network will calculate their own accuracy, so no located nodes can select the nodes with higher accuracy from the received location information to improve the positioning accuracy. After a positioning cycle, located nodes that have been converted into reference nodes, which have been converted into common location nodes, so as to avoid the proliferation of information. In addition, most nodes will move with the influence of ocean currents and tides, and it is difficult to get the law of their movement. Therefore, it is necessary to re-position nodes periodically. Therefore, this paper sets a positioning error threshold, when the positioning error exceeds the set threshold, and the network has failed, the positioning is no longer done.
Structure model in underwater environment.
Anchor node election and location algorithm
Each sensor node can perceive and collect the surrounding environment information, and the nodes exchange information through the underwater acoustic signal with each other,
The importance graphic of 4 anchors to localize a node in a 3D environment.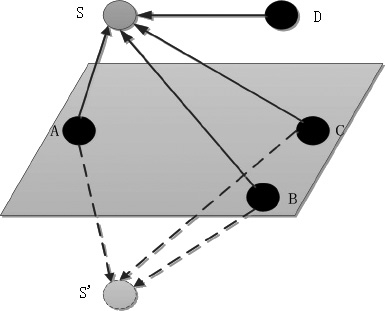
In an
Thus, in a three-dimensional environment, a common sensor node is located through four anchor nodes that are not in the same plane. The coverage algorithm can achieve 4-nodes coverage, which means that the common nodes in each sensor network are within the communication radius of four anchor nodes. The four anchor nodes can know their own position, the solution of the four equations can be solved according to the three-dimensional Euclidean distance estimation method, and three unknown
After nodes are randomly distributed in the target area, each common node After the waiting time Ordinary nodes If the number of anchor nodes around a common node is greater than 4, the anchor nodes with smaller energy are marked as ordinary nodes without affecting the coverage of other nodes. After the above three steps, There may be a situation in K-node coverage algorithm, namely, the number of anchor nodes around some common nodes is greater than 4. It has shown in Fig. 5, the neighbor nodes of node P are A, B, C, D, E, F and G, the number of neighbor nodes of these seven nodes is greater than 4, then the nodes with large energy A, B, C and D are taken as anchor nodes. The number of neighbor nodes of neighbor node Q of the node E is equal to 4, and the node E is elected as the anchor node. Therefore, the node P will be covered by five anchor nodes A, B, C, D and E, in order to reduce energy consumption and avoid data redundancy, the redundant anchor nodes need to be marked as ordinary nodes by the step 4 of the algorithm.
There are more than four anchor nodes in one node’s communication radius.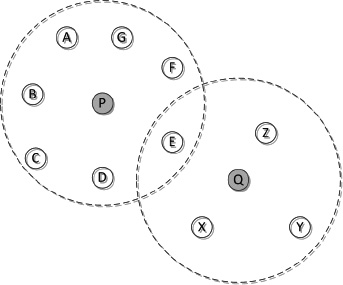
So the flow chart of the K-node coverage algorithm has shown in Fig. 6.
After the anchor nodes are selected, and they need to be positioned. The communication capacity, storage capacity and computing power for underwater anchor nodes are relatively stronger, and they can directly communicate with the surface buoy nodes, can locate themselves by taking use of information received. Water buoys are those nodes that have GPS and can obtain their own location information, and they exist as satellite nodes in underwater positioning.
There are two cases for ordinary nodes location, one has no fewer than four neighbor nodes, the other has three neighbor nodes, and the number of neighbor nodes of these three nodes is not less than 4. If a common node has not less than four neighbor nodes, it can be covered by four anchor nodes through the K-node coverage algorithm. the distance can be obtained between the ordinary node and the surrounding anchor nodes through the distance measurement technique, and the itself coordinates are estimated by the quadrilateral measurement method. If a common node has three neighbor nodes, and the neighbor nodes of the three nodes are not less than 4. Because nodes are randomly deployed in the underwater environment, at the beginning, there may be cases where some nodes have fewer than four neighbor nodes, and even if all of their neighbor nodes become anchor nodes, the positioning can not be completed, and the situation can be processed in the K-node coverage algorithm. However, at the beginning, this paper considers that a node has three neighbor nodes, and the number of neighbor nodes of three nodes is not less than four. Assuming that node A has three neighbor nodes B, C and D at the beginning, nodes B, C and D may be anchor nodes or normal nodes, but due to the neighbor nodes of node B, C and D are not less than 4, Node B, C and D will get their own position after the above steps.
The flowchart of K-node covering algorithm.
Now the unknown node A is located by the nodes B, C and D whose position are known, the nodes B, C and D will determine the two points
After the common node is located, the node starts to monitor the information in the environment of the communication radius. When the information is monitored, the node transmits the information and its own location to the water buoy through the routing protocol algorithm. the source position of the information is processed and calculated by water buoy. the nodes that monitor the information are more, and the location is more accurate, it has shown in Fig. 7. Nodes A, B, C and D monitor the same event Z, nodes A, B, C and D send their own position and Euclidean distance
Several nodes detecting the same event and giving the localization of this event.
The anchor nodes communicate with the water buoy through the GPS system, in order to complete its own location and send its own location information to the ordinary nodes and so on. Compared with ordinary nodes, the energy consumption is more larger and it is easy to die for anchor nodes. At the same time, due to underwater environment is poor, the anchor nodes are prone to accidental failure. Due to the importance of the anchor nodes in the positioning process, this paper proposed a self-repair algorithm based on the failure of anchor nodes, and other nodes are found to replace the anchor nodes that are about to die or fail, so as to avoid repeating the election of anchor nodes, and to reduce the positioning errors that cause due to energy depletion or failure of anchor nodes. When anchor nodes fail or drift to the sparse area, the positioning can not be done due to the lack of location information, and nodes broadcast the signal that can’t be located. When the located nodes receive the signal that can not be located, whether it has the qualification to be converted into reference node or not, it is forced to be converted to reference node, in order to help nodes location, and each of the located nodes in the network will calculate their own accuracy, so no located nodes can select the nodes with higher accuracy from the received location information to improve the positioning accuracy. After a positioning cycle, the located nodes that has been converted into reference nodes, which has been converted into common location nodes, so as to avoid the proliferation of information. The specific positioning method is as follows:
The buoy nodes float in the water, equip with GPS system, and can directly get their own coordinates. The anchor nodes communicate with the buoy nodes, and locate their coordinates through the quadrilateral measurement method, then broadcast their own position information to help the common nodes location. Within a positioning period, if unknown nodes have not less than four neighbor nodes (the location information of the reference nodes may be contained), or there are three neighbor nodes and the number of neighbor nodes is not less than 4 ordinary nodes, and the quadrilateral measurement method is adopted to calculate their own coordinates. their own accuracy are calculated according to Eq. (5) after calculating their own coordinates. In Eq. (5),
The located nodes operation flow.
Not located nodes operation flow. Accuracy can help the node to determine whether it is qualified to be converted into a reference node, and in the subsequent positioning, can help the unidentified nodes to filter out more accurate location information, thereby the accuracy of the entire network positioning is improved. In the failure area of anchor nodes, or in the sparse area of anchor nodes, the unknown nodes are able to receive enough location information. Therefore, in a positioning period, if the unknown node does not receive four or more position information, then broadcast their own signal that can not be located. If the located nodes have received the signal that can not be located, and have not been translated into reference nodes, they will be converted into the reference nodes directly, so the constraints that are converted to reference nodes are no longer executed. Their own location information that have been broadcast, which can help positioning of nodes that can not be located after the located nodes are converted to reference nodes. When the unknown nodes receive location information, if the location information is greater than 4, which is sorted according to the accuracy, and the four position information with higher accuracy are selected for positioning. The located nodes that have converted into reference nodes, which will be changed into normal nodes after one cycle, and broadcast their own location information no longer.
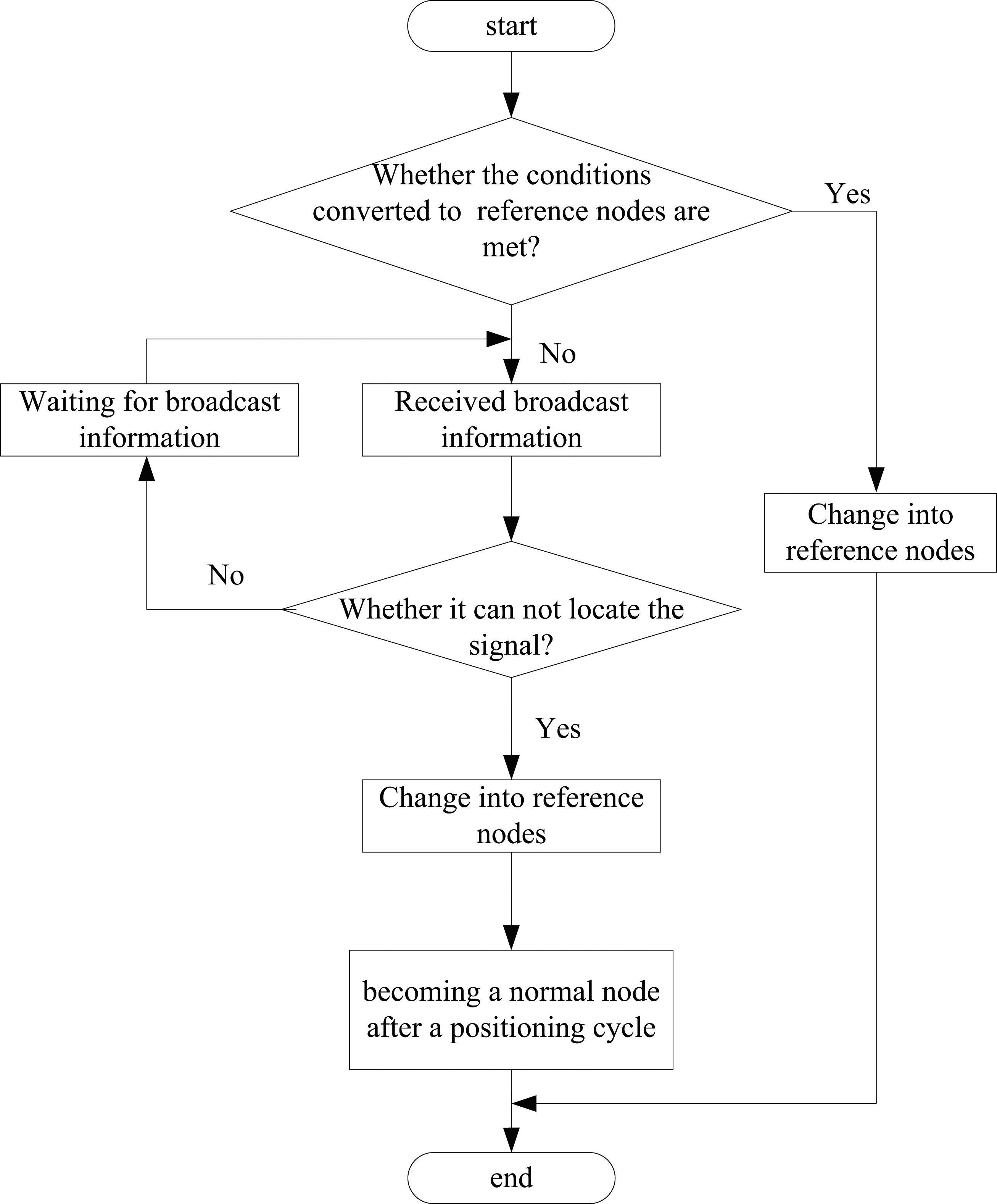

In short, the type of information will be judged when the nodes receive the broadcast information, and the relevant operations are done according to their own state. The operational flow of the located nodes has shown in Fig. 8 and The operational flow of the unreserved has shown in Fig. 9.
Simulation environment model
Underwater environment is complex and changeable, the propagation path of acoustic signal is mainly multi-path propagation, it is impossible to establish a model which can accurately simulate the underwater acoustic channel. After comparing the existing typical underwater acoustic channel model, the Rayleigh fading channels model is adopted, that is, the attenuation model of the underwater acoustic signal is given by:
where
where the unit of
When underwater temperature, salinity or pressure (depth) changes, the transmission velocity of the underwater acoustic signal will also change, in this paper, so the sound velocity model is as follows [10]:
where P is the temperature (
In order to test the performance of the algorithm, the SHLA algorithm and the large-scale positioning method (LSL) are simulated and analyzed with MATLAB from the aspects of positioning coverage, average positioning error and average communication cost. There are three kinds of nodes such as water buoy, anchor node and common node in large-scale positioning method (LSL) [9, 10]. The water buoy can obtain its own position information by GPS system, and the anchor node completes the location and broadcasts its position information to the network after it obtains the surface buoy position information, then the unknown node receives the location information of the anchor node to complete the positioning. This algorithm adopts the TOA ranging technique to calculate the distance between nodes, and selects some nodes with high positioning accuracy as the reference nodes, so as to participate in the positioning process of the next ordinary node. In the region of 100 m
Node coverage of different localization algorithm.
Localization error of different algorithm in static environment (nodes density is equal to 9).
The positioning errors of the two positioning algorithms in static environment have shown in Fig. 11. When the node density is equal to 8, the positioning error of SHLA algorithm is larger because the nodes of the network are not covered by four anchor nodes. When the node density is greater than 8, the positioning error will gradually be smaller than the LSL algorithm, and does not change after a certain value. The reason why the SHLA algorithm is superior to the LSL algorithm is that the anchor nodes in the network override the ordinary nodes optimally, and do not need to select the reference nodes to help the other unknown location nodes to complete the positioning, so the errors will not be accumulated. When the self-healing algorithm is started, the errors can be accumulated in the self-healing algorithm, and the expected error will be increased, but this is not seen in the simulation results.
The positioning errors of the two positioning algorithms in dynamic environment have shown in Fig. 12. Most nodes will move with the influence of ocean currents and tidal effects, and it is difficult to get the law of its movement, so it is necessary to the periodic re-positioning of nodes. The simulation experiment is carried out in a slow underwater environment. For the LSL algorithm, the anchor nodes are better distributed at the beginning, but due to the nodes have different moving speed in the different depth, the relative position between the nodes will be changed greatly, the better distribution will be broken, and some anchor nodes will die or fail, so the errors will be increased. The SHLA algorithm will re-elect the anchor nodes, the optimal coverage of ordinary nodes will be done, and the self-repair algorithm can find other nodes to replace the anchor nodes that they are energy depletion or failure, so as to locate the coverage ordinary nodes, so the error of the SHLA algorithm is lower than LSL algorithm.
Localization error of different algorithm in dynamic environment.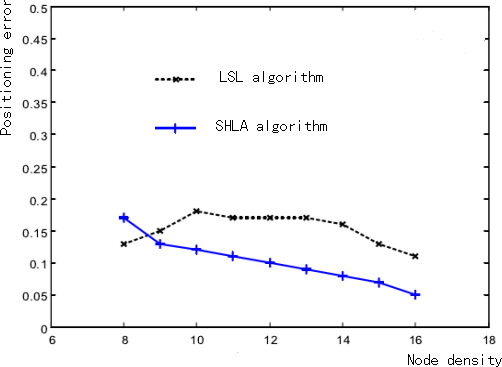
Average communication cost of different algorithm.
The average communication overhead for the different positioning algorithms has shown in Fig. 13. Compared with LSL algorithm, The SHLA algorithm has the election of anchor nodes and self-repair algorithm, so the average communication overhead is larger. In the stage of self-repair, the communication cost of SHLA algorithm is related to the number of hops, The larger the hop count is, and the higher the communication cost is. The nodes density are larger in the SHLA algorithm, the common nodes are more covered by four anchor nodes, the number of self-repair algorithms is reduced, and the average communication overhead is smaller.
In conclusion, the simulation results have shown that the SHLA algorithm has improved the positioning coverage and positioning accuracy at the expense of a small part of communication overhead, and it is suitable for underwater environment with slow flow rate.
In this paper, A Positioning algorithm with self-repair capability is proposed for underwater wireless sensor networks. First, some nodes are selected as anchor nodes by K-node coverage algorithm, so that the nodes in the network are most covered by four anchor nodes. Second, The nodes adopt the position coordinates of the anchor nodes to complete their positioning. then the nodes transmit the detected environmental information and their own coordinate information to surface buoy. In view of the failure of anchor nodes in the network, the self-repair algorithm can locate the common nodes that are covered by the failure anchor nodes well. Since most nodes move with ocean currents and tides, and it is difficult to get the laws of their movement, the nodes need to be re-positioned periodically. If nodes that monitor the same event are more, and the positioning results are more accurate. Through the simulation analysis, compared with LSL algorithm, the SHLA algorithm has improved the positioning coverage and positioning accuracy, and it is suitable for the underwater environment with slow flow rate.
Footnotes
Acknowledgments
This work was supported by Jiangsu Province Fifth “333 Project” Scientific Research Funding Project (BRA2016292), Six Talent Peaks Project in Jiangsu Province (DZXX-038) and Open Fund Project of Marine Resources Development Institute of Jiangsu (JSIMR201414).