
Abstract
The Shape Memory Alloys (SMAs) are smart materials, which have many thermo-mechanical characteristics that can back to their initial strain when they exposed to a definite temperature. They are materials that change their mechanical proprieties in response to stress or heating such as shape, displacement and frequency, which are useful for actuators in many domains such as industry, robotics and engineering. In order to realize thermo-mechanical investigation about Shape Memory Alloy Actuator (SMAA) controlled by the radiation effect, which is useful for renewable energy applications. In this way, numerical simulation simulates shape memory alloy at different temperatures, to show the ability of this materials in various conditions and the parameters are obtained by previous experimental measurements. The first results are pleasing.
Introduction
In the last years,the SMAs have been used in many fields such as robotic, engineering, medicine and aeronautic. The special character of this materials advises in two principal macroscopic properties are the Super Elasticity Effect (SE) and the shape memory effect (SME) [1].
The shape memory alloys can be existed in two crystal configurations: first one stable at higher temperatures called Austenite phase, the second one stable at lower temperature called Martensite phase [2].
Hysteresis the martensitic transformation.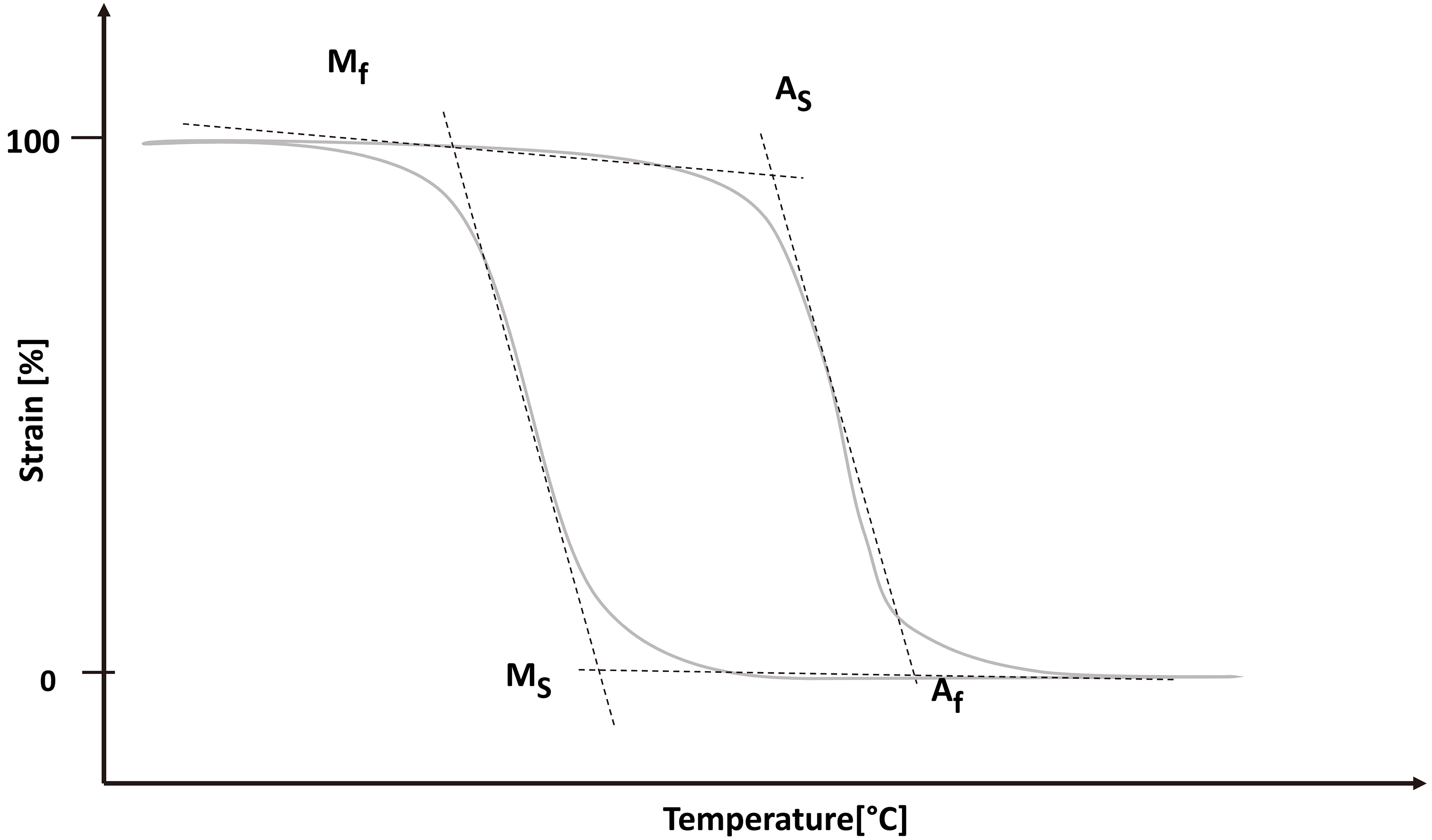
We set four important temperatures in Fig. 1: (M
The shape memory alloy has been used as a sensor due to its sensibility to temperature and stress, where also can be used as actuator thanks to its ability to recover a large amount of strain against significant stress. This actuator can be made as a spring, ribbon shape or wire. It is able to produce extreme forces from the viewpoint of volume to force ratio [4]. When two-way actuators designed to operate to remember two shapes: one at Martensite and the other at the austenite over many cycles [4] as shown in Fig. 2.
Two-way shape memory effect (a) austenite phase (b) intermediary phase (c) Martensite phase.
The SMA actuation devices can activate by multiple ways such as exposure to direct temperature, by means of electrical resistance heating and radiation heat. On the one hand the electrical heat and direct temperature are the most used methods in applications, on the other hand the radiation effect is never used even though can be used in many renewable energy applications [3].
In this investigation, we will explore the shape memory alloy for the purpose to create an actuator (tracker) performed the dual functions of sensing and actuating we will study the shape memory alloy which may be useful for thermo-mechanical actuators. For this purpose, we propose a numerical investigation aims to study this material under a solar radiation heatto be able performing the function of trackers and integrate this actuator with the collector to develop a new robotic solar system. The simulations of strain induced by heat under constant compressive stress presented and the parameters had obtained by previous measurements.
In this section, we propose a numerical model for Shape Memory Alloy aims to study this material under a solar radiation heat, and design ashape memory alloy actuator.
SMA model
This model is described the mechanism of field-induced large strain of shape memory alloys and their proprieties especially the shape memory effect, the kinetic law that describes the transformation of phase has considered for the phenomenological model. For the purposes of this study, a design objective pursued to optimize the initial configurations and the dimension of the SMA actuator. The fundamental assumptions of this model are as follows [7]:
The formalism of small deformations is used The elastic moduli are assumed to be equal for austenite and martensite The transformation deformation is assumed deviatoric The effects of thermal expansion are neglected In the frame of mechanical behavior of Shape Memory Alloys traditionally with the total strain,
In the frame of macroscopic of mechanical behavior of Shape Memory Alloys (SMA) traditionally with the total strain,
The elastic strain:
The transformation strain:
The transformation strain:
Where
The SMA characterize by the martensite transformation, which can initiate with applying stress or varying the temperature, that allocate the fraction of martensite into temperature induced martensite
Where:
The constitutive equation relates the variables of strain
The 0 means the initial condition of the SMA [6],
While the transformation from austenite to martensite describe by:
The shape memory effect is utilized when SMAs are used as actuators. The helical shape is used, due to the number of parameters that can be arranged, its ease of fabrication and its compactness.
In this section, the design of the shape memory alloy actuator is a wirehas been designed as springdue to its ability storing energy. In this way, the spring can store energywhen it is compressed after heating and lost energy when it is stretched after cooling.
The stress in the wire and the force on the spring can be connected [6]:
Where
The deflection of the spring, assuming the material to be elastic is given by:
Where
Thus, the stiffness (
The maximum possible stroke (
Where
The load on the spring during heating denoted by
We can find the load,
After the progress of this section of the model and its validation shown in part 3 (simulation) from the geometrical parameters it is then possible to get the thermal parameters (radiation needed for phase transition) to estimate the power needed for activation. To illustrate the result above, a simulation of this model was performed in the next part. Accordingly, from the geometrical parameters it is then possible to get the thermal parameters (radiation needed for phase transition) to estimate the power needed for the activation of the actuator.
By using the geometry of spring and the proprieties of the shape memory alloy, in particular the two-way shape memory effect (Fig. 3). The SMAA designed to operate in two directions over many cycles that the material remembers two shapes: one at high temperature and the other at low temperature [8].
One-way shape memory effect: (A, C) austenite, (B) Martensite.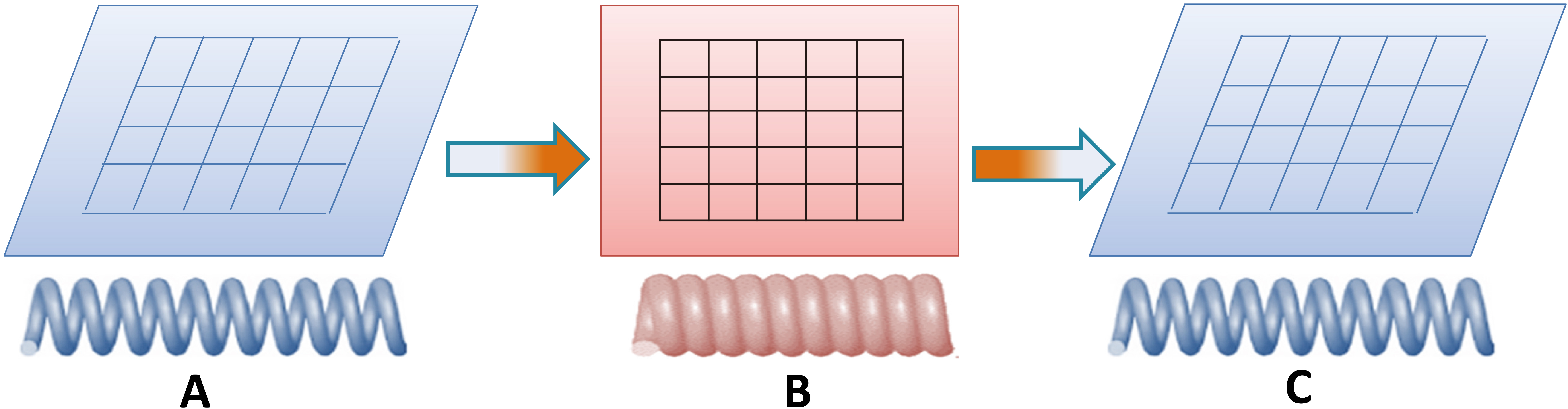
It is accepted that the sun provides an important thermal energy which can be able to activate the austenite phase of the shape memory alloy. In this way, the Shape Memory Alloy Actuators can respond to a thermal stimulus to induce a displacement by exerting an important force on a definite weight.
Solar radiation is the exposure of a body to a stream of radiation from the sun. the sunshine refers to the amount of energy received from the sun at one location. Solar electromagnetic radiation is the phenomenon by which energy escapes from the sun at the speed of light in a wave motion. Solar radiation is an undulating form of energy transfer that allows the transfer of heat by means of electromagnetic waves. According to the principle of wave-particle duality, the electromagnetic radiation emitted by the sun can be described in two ways: it is at the same time an electromagnetic wave characterized by a frequency
Where
The work according to the radiation heat is a major energy that can transform the SMA spring from the martensite phase (compressed) to austenite phase (stretched) (Fig. 4).
Work extraction from SMA.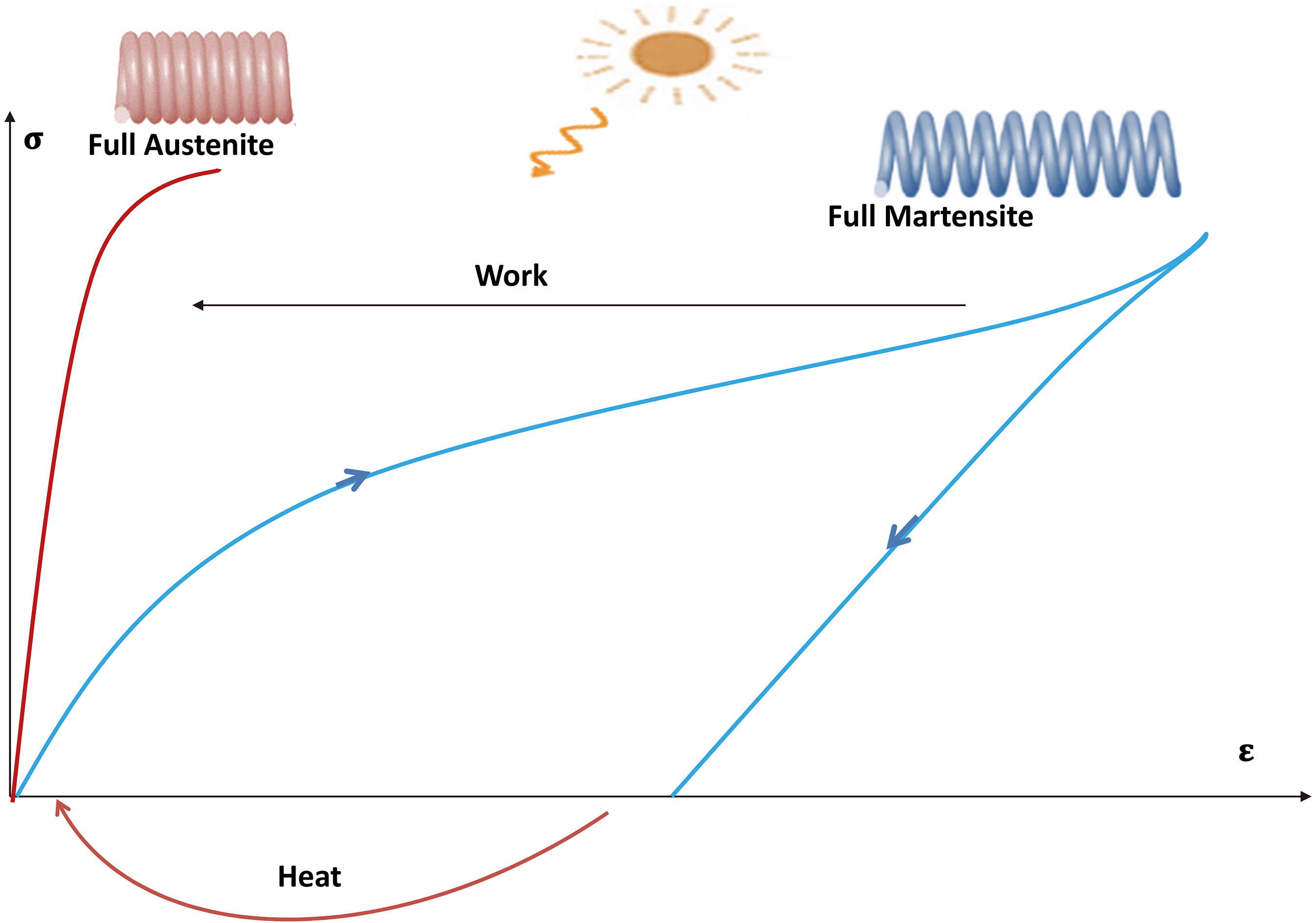
Ni-Ti spring respond to a thermal stimulus. a) In martensite phase, b) Intermediate phase, c) In austenite phase.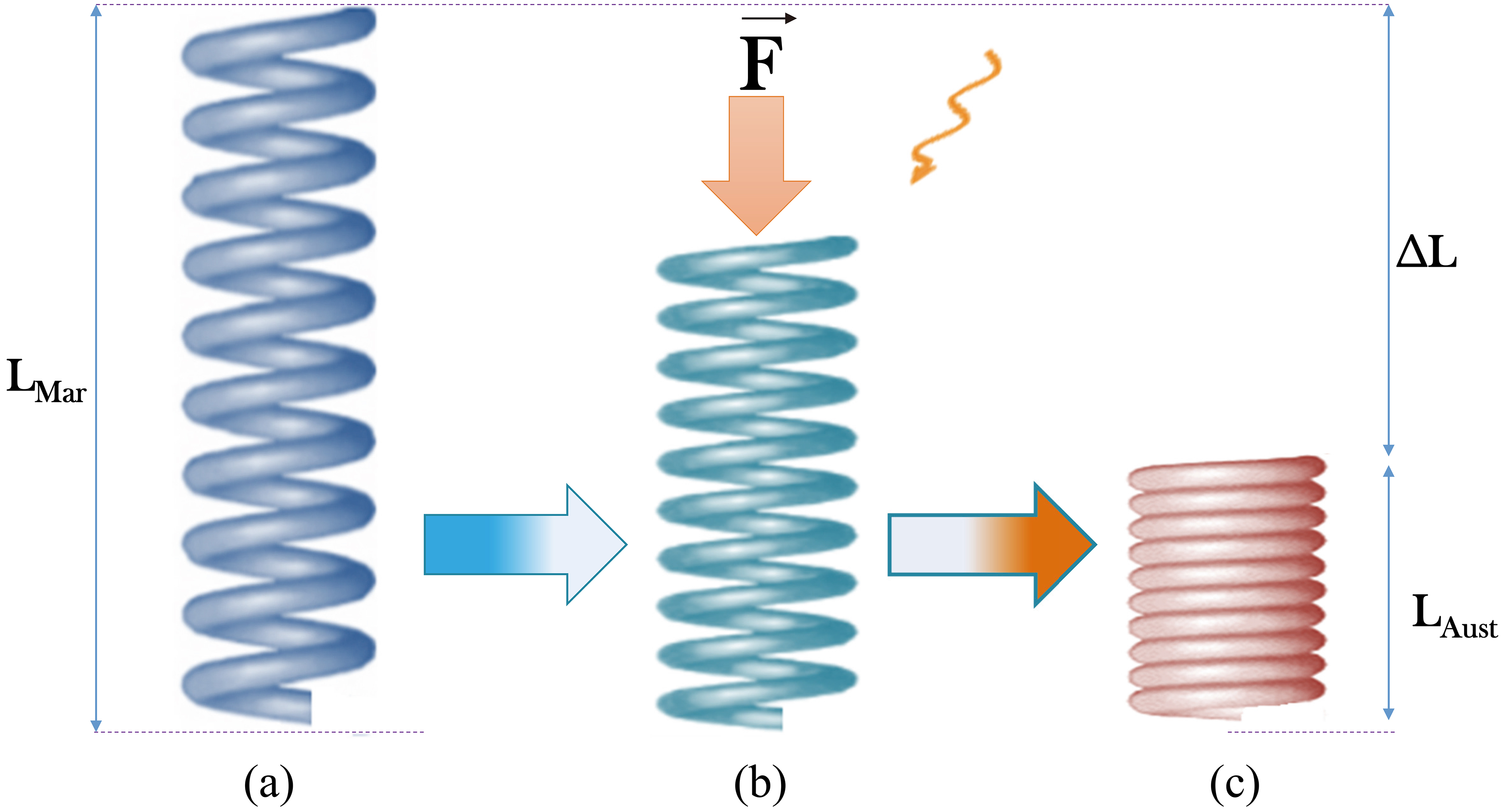
Thus, The SMAA store the acquired energy from the sun when it is heated by radiant energy. Hence, it releases this energy in the form of mechanical one in the absence of radiation heat [8].
In the first state, the SMAA is stretched in martensitic phase (lower temperature) under the Martensite start after the SMAA is exposed to a thermal stimulus after a little time (a) it can get energy therefore it became compressed (c) with a displacement
In this study, we are mainly interested in the ability of the material to alter its state and lift a constant weight by increasing the temperature coming from the sun radiation [9].
The curves at high and low temperatures of SMA Ni-Ti.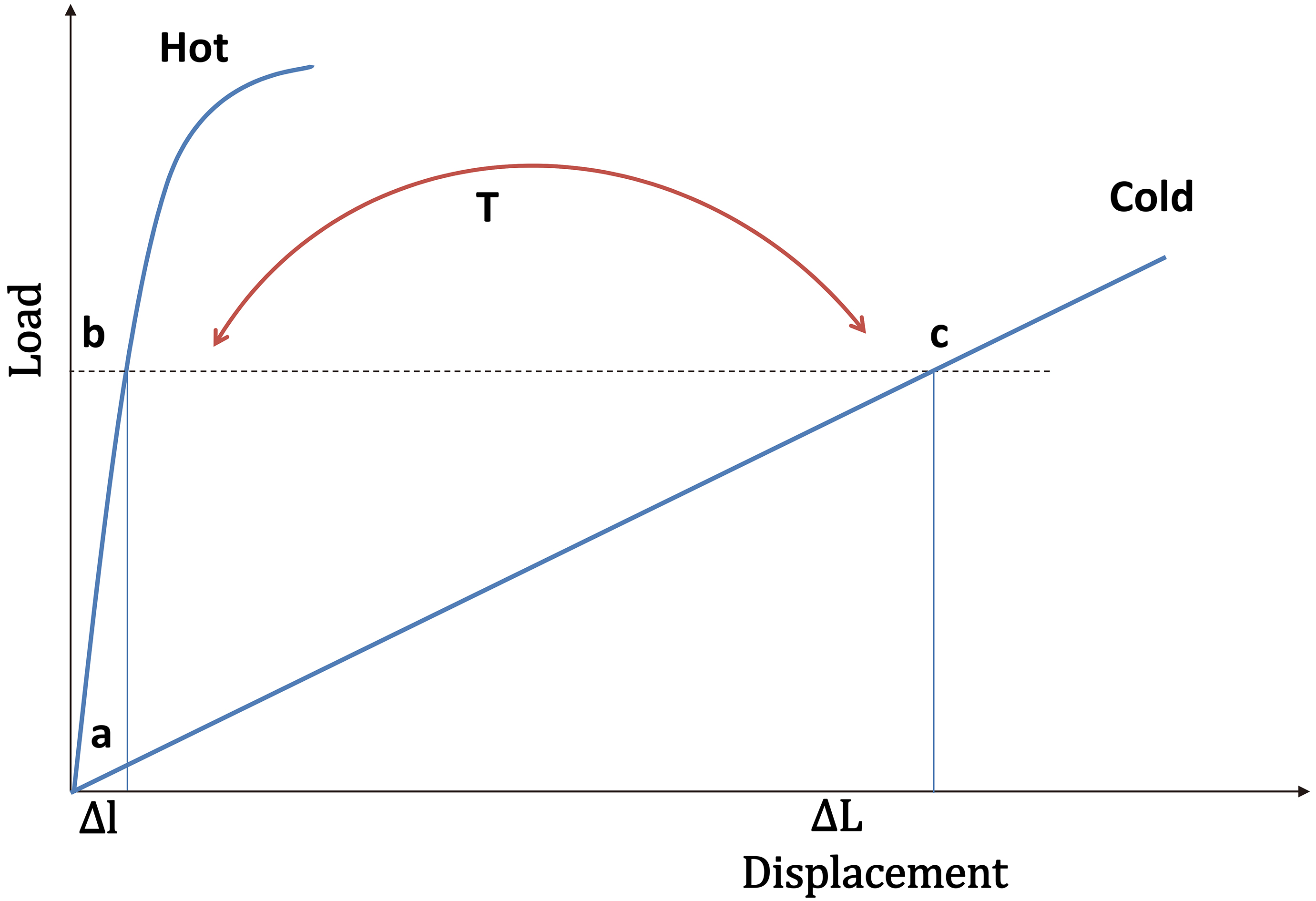
Therefore, we have made an experiment to show how the actuator respond to different temperatures while keeping the same weight.
The design of the open-loop functional model needs based on the following Fig. 7.
Ni-Ti spring response a constant load and radiation heat.
This feature of shape memory alloys is very interesting and we can use it in many applications (industry, renewable energy and microsystems…).
The actuator proposed consists of spring fixed around a cylindrical beam which keeps it straight and easily moving up and down [5, 8, 9].
The proposed actuator device with/without heat radiation. a) Position 1: Solar radiation is falling on SMAA (Heating). b) Position 2: Solar radiation is NOT falling on SMAA (cooling).
The ability of shape memory actuator to change the position and lift specific weight depends on the materials used, the weight, the percentage of the sun radiation that can be affected by the seasons and time (the morning or the afternoon). Thus, the SMAA could achieve a good performance if it takes into account these conditions as ingredients in the modelling process [8, 9] (Fig. 8).
Moreover, this actuator can be used to develop a new sun tracker based on shape memory alloy to be like sunflower plants witch performed the dual functions of sensing and actuating. So much that, the collector can follow the sun like the sunflower and face the sun directly during the day to optimize the production of solar energy. the collector has three support made from shape memory alloy actuator (SMAA) in three position. The first one in the east side, the second in south side, and the third in west side. Accordingly, a simple model describes systematically the work of the sun tracker based on shape memory alloy. This smart tracker controlled by the change of temperature and strain that used to apply a load can change the direction of the collector.
a) the collector I the East-side; b) the collector I the South-side; c) the collector I the West-side.
The sun tracker works like the sunflowers is controlled by temperature created by sunlight and the shadow of the collector (Fig. 9):
The collector starts with the sunrises in the east. Meanwhile, the sunlight heats the SMAA in the east side and compressed unlike the others SMAA in the shadow still stretched (martensite). Hence, the collector faces east. As the sun moves, the SMAA faces the sun heats by the sunlight that increase the temperature of the SMA that is why transformed to austenite phase (compressed) when the others eclipsed by the collector’s shadow. Whenever the sun moves from east to west, the SMAA in the front change gradually the form and extend from one side of the tracker to the other. The collector finished the daily cycle faces west side and can repeat the same process in the next day.
In this study, we prepare a simulation by taking a relative value between the minimum temperature and maximum one. We have used the proposed model and used the properties of thematerial for the simulations.
Proprieties of the spring actuator used in design calculation [7]
Proprieties of the spring actuator used in design calculation [7]
After input the parameter in Matlab the result in (Fig. 10) between the strain and temperature, which is a pleasing result of the shape memory alloys. The Strain-Temperature curve results from the numerical simulation shows in Fig. 10.
The shape memory effect mechanical behavior of the SMAA.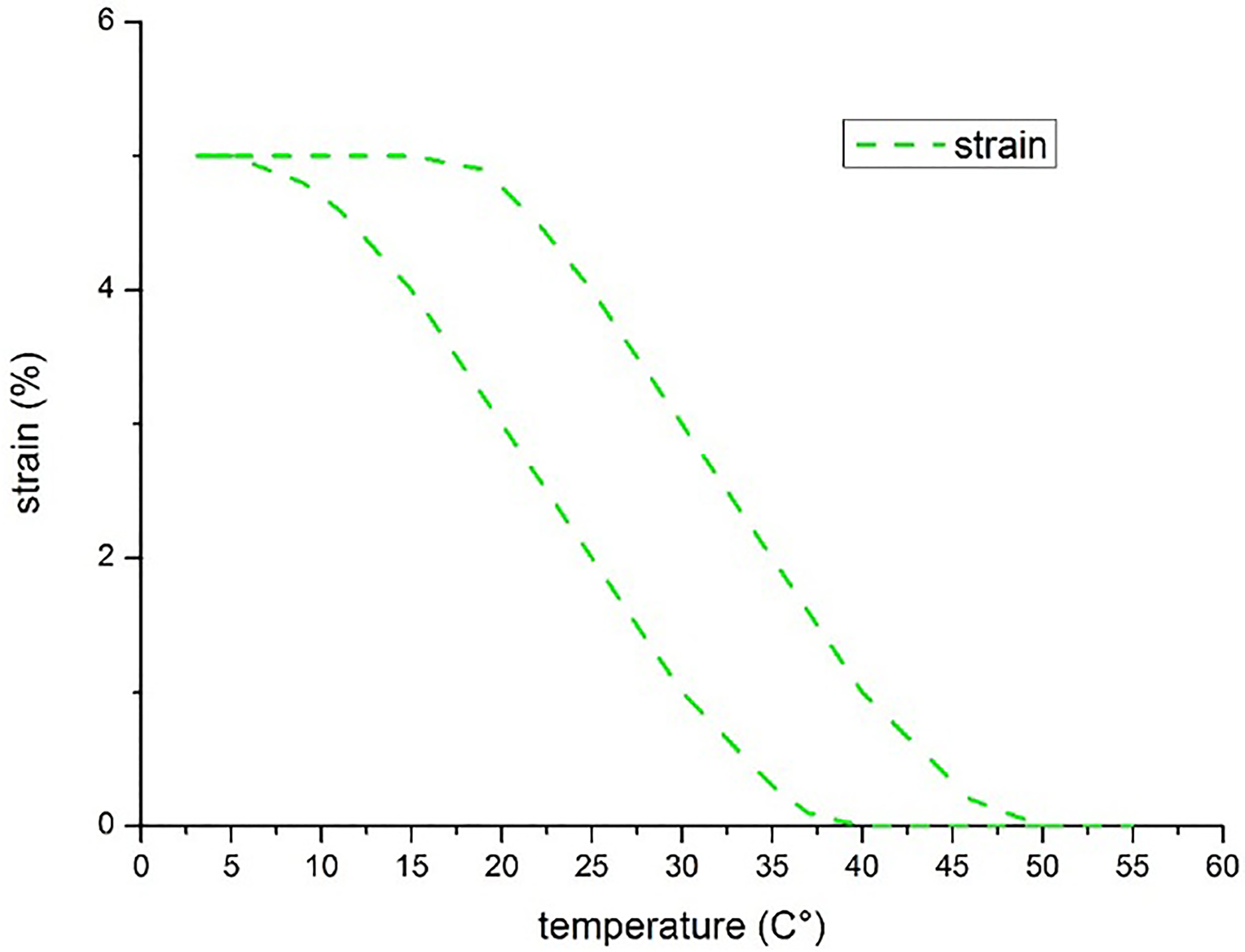
We also simulate the same actuator in the case of stress Vs strain of spring, in this case, after unloading, the actuator does not recover its initial shape (Fig. 11), but after heating, it can have recovered [8, 9].
The shape memory effect mechanical behavior of the SMAA.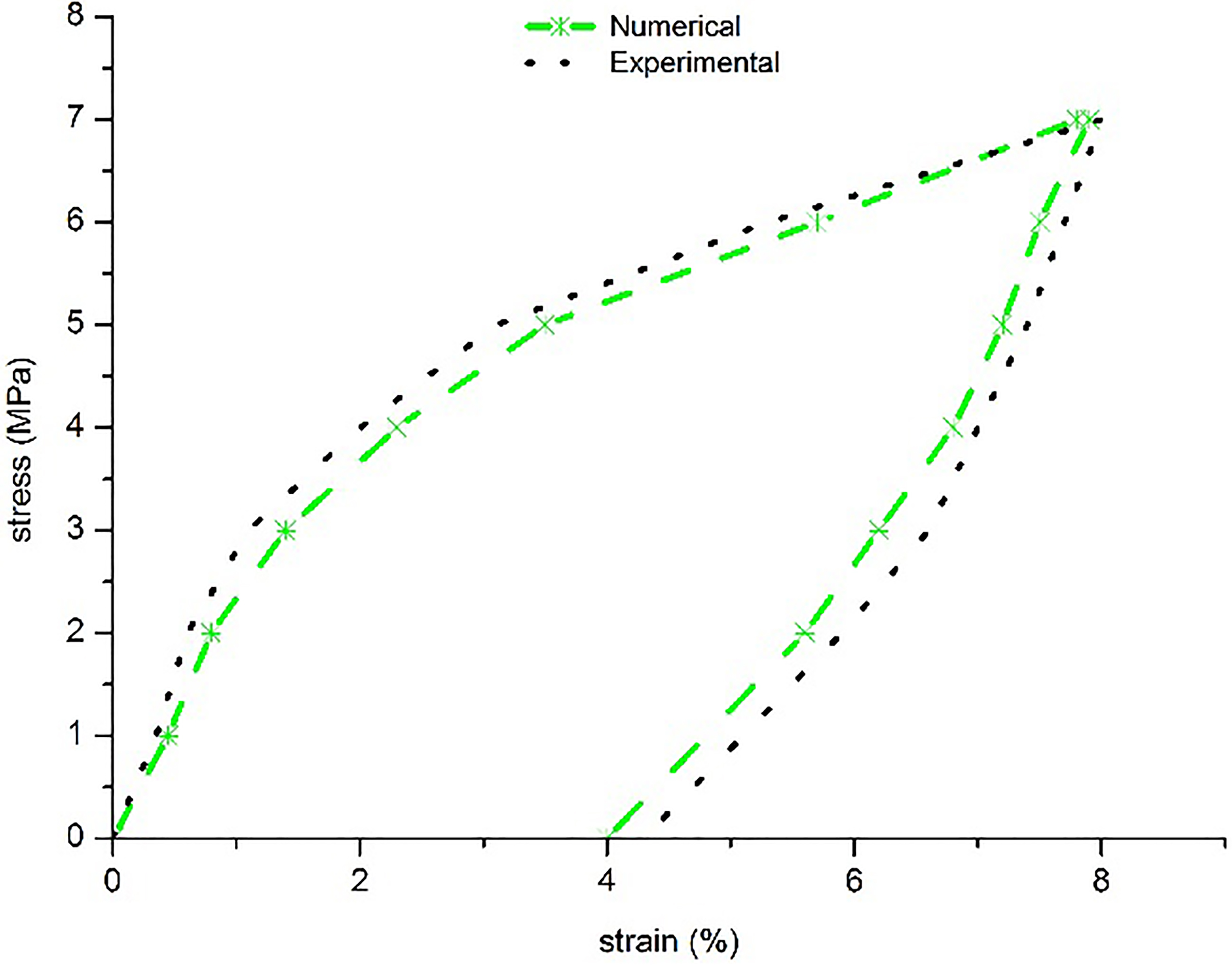
It was the main purpose of the paper to draw attention to the shape memory alloys heated by solar radiation and simulates their behavior to perform as actuator (tracker) executed the dual functions of sensing and actuating. In the first phase of the validation process, it has been considered that the wire is heated by the sun radiation. The value of heat is equal to that one employed in the normal days’ temperature. The model output has been observed both in terms of variation of stress and strain and temperature in time.
Figures 10 and 11 curve shows transformation hysteresis. The change of deformation is produced by radiation heat. In this way, the temperature of material increases with increasing of the radiation of the sun over the day or when the sun faces the material or not, therefore, it is essential to define the transformation temperature to determine the radiation of the martensitic and austenitic.
Figure 10 shows the change of strain with the temperature produced by radiation heat. It is observed that the simulation was able to describe the behavior of these materials and it was proved in a normal day. Firstly, the sun faces the material and the temperature increase and reach more than 40
Figure 11 shows the relationship between stress and strain, in different temperature.This is the reason why the SMA return to its original shape after deformation when is heated by the solar radiation accordingly to get the shape memory effect. Therefore, the strain is about 5%, the SMA is worth mentioning that once the stress increases when the strain increases [7].
Conclusion
This paper is a numerical study describes the thermomechanical behavior of shape memory alloy under the effect of sun radiation. The model succeeds in capturing material behavior under complex non-proportional thermomechanical loading, by taking in mind the simultaneous activation of transformation and reorientation. Its validity has evaluated in comparison with experimental results. The simulation in MATLAB was used to study both the shape memory effect and superelasticity features of a SMA wire in different thermal conditions, which can be applicable tool for industrial applications and renewable energy. It can offer a wide deformation and simple heating arrangements which will give opportunities to design many actuators for clean energy.
The proposed actuator satisfy certain has many advantage to the studied application, as: simplicity of movement and fabrication, reduce energy consumption, works under different perturbation conditions (wind, rain, important temperature variations); can work in a water environment and can exert enough force to provide the elongation and shortening of the tracker. Have a fatigue life of more than 100 000 cycles according to manufacturer’s data sheet [12]. In this way, this study validates numerical and that can validate experimental in the next paper to be similar to the sunflowers process for collecting the energy from the sun.