
Abstract
In order to solve the problems of nonlinearity and large time delay in complex system, this paper combined T-S RBF fuzzy neural network control with predictive control, and proposed a fuzzy neural network prediction model model which integrates the fuzzy logic ability of fuzzy control, the powerful learning ability of neural network and the nonlinear expression ability. The method of feedback correction with self-compensation ability was applied to the online correction of the prediction model model. And the controller of T-S RBF fuzzy neural network was designed. The simulation result shows that the self-adaptive predictive controller of fuzzy neural network can build accurate prediction model model for the controlled objects, control the difference of network output and sample output in a small range, and enable actual output to properly follow model output, and it can be applied to any complex nonlinear system. Meanwhile, this model has good anti-noise performance, robustness, tracking ability and self-adaptability.
Introduction
Fuzzy neural network technology has been widely applied in the modeling, identification and control of complex system and achieved great progress. The mode of combining fuzzy neural network and other advanced control methods has been developed and become one of the major ways of complex system process control. Although there are many researches on it, few of them focuses on effective method of feedback correction for the nonlinear prediction output of artificial neural network. The nonlinear multi-step predictive control requires multi-step recursive prediction, which, however, will amplify the indispensable error of system model in practice, especially in the multi-step predictive control with large nonlinear time delay. Therefore, it’s important for the implementation of complex system predictive control to utilize the known measured values and control output values to build effective feedback correction function, thereby improve the accuracy of closed-loop prediction and the robustness of complex system predictive control.
Compared with other control algorithms, predictive control algorithm has the following advantages:
It simplified the modeling process to a great degree. Especially in complex industrial process control, the structure and parameters of controlled object and the environmental conditions all change with time. Thus predictive control algorithm which can simplify modeling is of great significance for complex industrial objects. Predictive control algorithm has simple mechanism in processing multi-variable system and can timely consider many kinds of constraint problems. It has good tracking performance and anti-interference ability, and robust control can be achieved through proper selection of parameters. The online computations of predictive control algorithm are simple non-matrix computations that can be operated successfully by microcomputers or minicomputers, thus it’s convenient and practical.
The regular PID control is not effective for complex system; fuzzy control does not have satisfying leaning ability and self-adaptability; neural network control does not perform well in expression. In order to improve the result of system control and the learning ability, self-adaptability and robustness of system, this paper proposes a predictive control system of T-S RBF fuzzy neural network. In the control system, controller and prediction model are enabled by T-S fuzzy RBF neural network, the structure of the predictive control system is as Fig. 1 shows.
Structure of predictive control system of T-S fuzzy RBF neural network.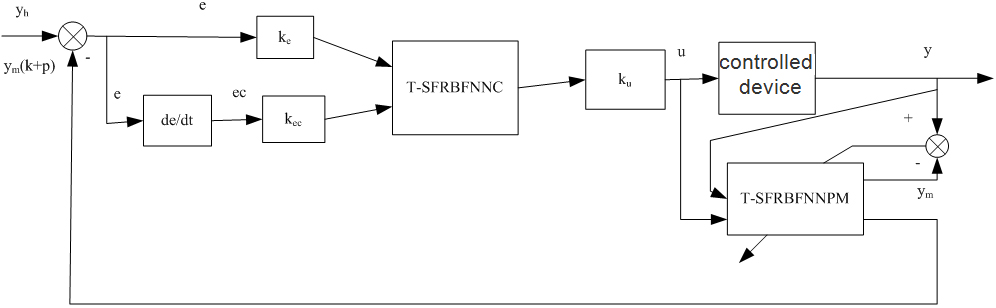
In Fig. 1 T-SFRBFNNC represents T-S fuzzy RBF neural network controller; T-SFRBFNNPM represents that the modeling of predictive control for the controlled object is enabled by T-S fuzzy RBF neural network, it provides opportunities of parameter learning for T-SFRBFNNC;
Offline learning means that network learning process is separated from control process, and the network is trained using some known inputs and outputs as the learning samples. While online learning refers to putting the untrained fuzzy neural network into control system for self learning in the process of feedforward control.
Online learning and offline learning have their own merits and demerits. Offline learning enables the fuzzy neural network to finish learning ahead of system control process; the learning method is simple and a multi-layer fuzzy neural network basically reflecting the requirements of system can be obtained. However, the learning samples don’t cover all the possible scope of work of the system, thus it can hardly get adapted to the parameter changes during the operation of the system. As for online learning, parameter adjustment is based on the difference value between the actual the desired output values of the system, and network learning and control process occur simultaneously. Nevertheless, the dynamical structure of controlled object needs to be known in online learning, which is a difficult task for the control process; in addition, a certain amount of time is needed for the learning during control process, and when the change of error is great, the converge rate of learning will lag behind of error change, which brings great inconvenience for online learning.
With regard to the advantages and disadvantages of online learning and offline learning, the two methods are combined together in this paper. First, the network completes offline learning to determine the membership function and the discovery rule for the modeling of multi-step predictive control of the system; then the network is put into the system for online computation; next the feedback correction method is adopted to revise the difference between the actual output and the desired output of the system; finally online adaptive regulation is implemented for T-SFRBFNNC.
Next, according to Fig. 1, this paper divided the control system into two parts – T-SFRBFNNPM and T-SFRBFNNC to be designed separately.
The design of T-SFRBFNNPM includes two aspects: modeling of predictive control and feedback correction.
Offline prediction model
Prediction model is one of the most important components of predictive control. Enormous researches show that the prediction model with sufficient information redundancy is very helpful for improving the real-time tracking performance and robustness of the control system. Since the model of fuzzy neural network is on the basis of sample space composed of inputs and outputs, which has no special requirements on the model of controlled system, therefore, this paper uses T-SFRBFNN to build the model of offline predictive control for the controlled system.
The time discretization Eq. (1) is employed to describe the input and output characteristics of nonlinear time-delay system.
Where the input and output of the controlled object are presented by
By combining Eq. (2) with T-S RBF fuzzy neural network and thereby building prediction control model for the controlled object, the model of T-S RBF fuzzy neural network as Fig. 2 shows can be obtained.
Prediction model of T-S RBF fuzzy neural network.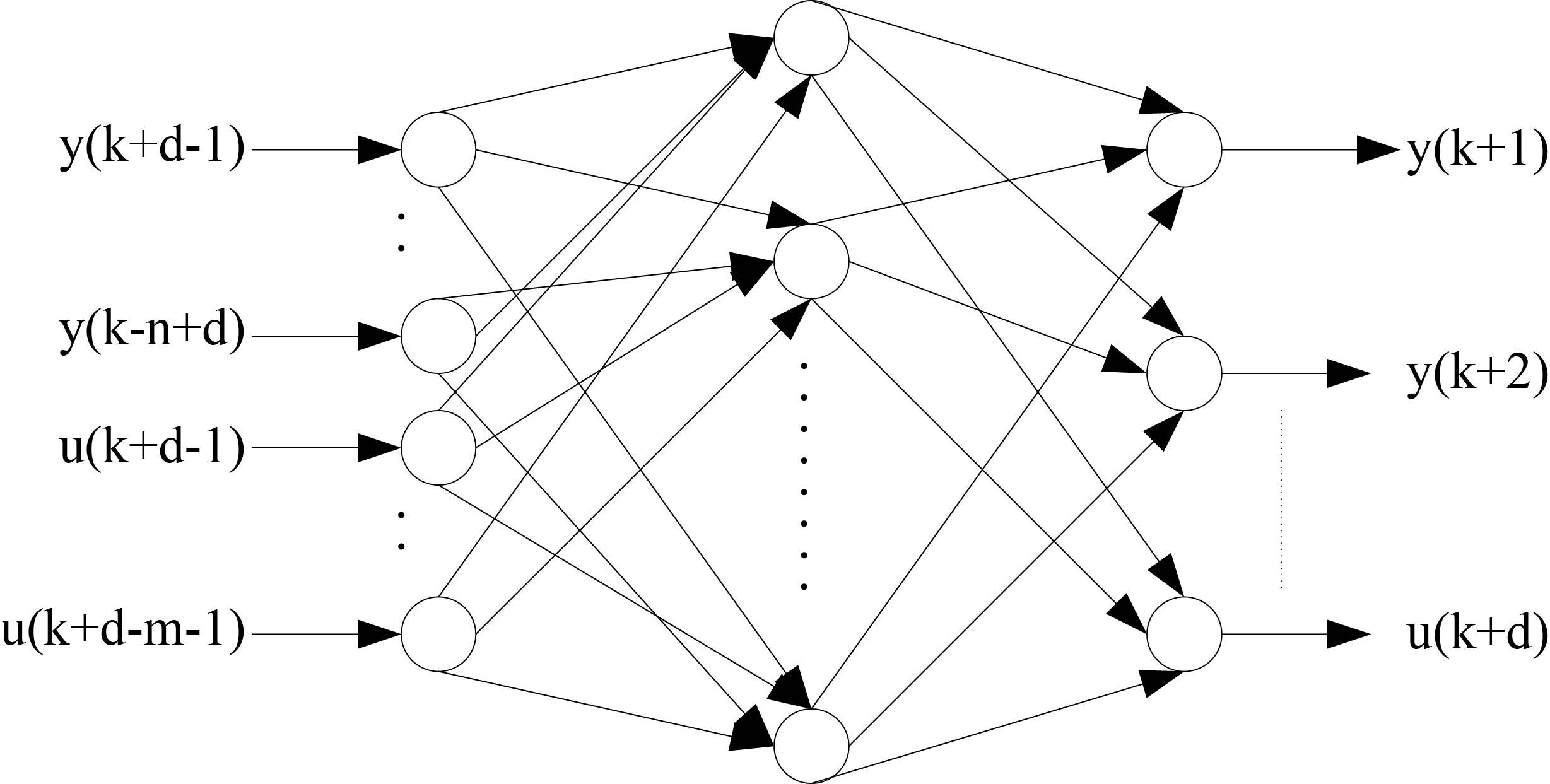
What’s worth attention is that in the prediction model, the membership degree function of hidden nodes is Gauss function.
From Fig. 2, it can be found that the multi-step prediction is actually the multi-time mapping of the input of T-S RBF fuzzy neural network prediction model to its output.
Thus the output of the prediction model of network is:
Where
In the equation,
With the offline prediction
During practical industrial process, because of the deviation of modeling and that caused by all kinds of external interference, the error between the predictive control output of fuzzy neural network and the actual system control output is indispensable. However, the process has a criteria for the error. In order to reduce the error and make the predictive control output close to the desired value for the purpose of self learning and self adaptation, the online feedback correction of prediction output is necessary. The design of correction terms will directly decide the control performance of predictive control system. This paper adopts the method of self-compensation feedback correction to directly adjust the output of prediction model online, which can reduce identification time and achieve real-time control. This method can be expressed by the following equation:
Where
By combining Eqs (9) and (10) the relation of feedback correction is obtained:
In the equations above,
For the design of controller, the T-S RBF fuzzy neural network is adopted, whose structure is as Fig. 3 shows.
Structure of T-S RBF fuzzy neural network.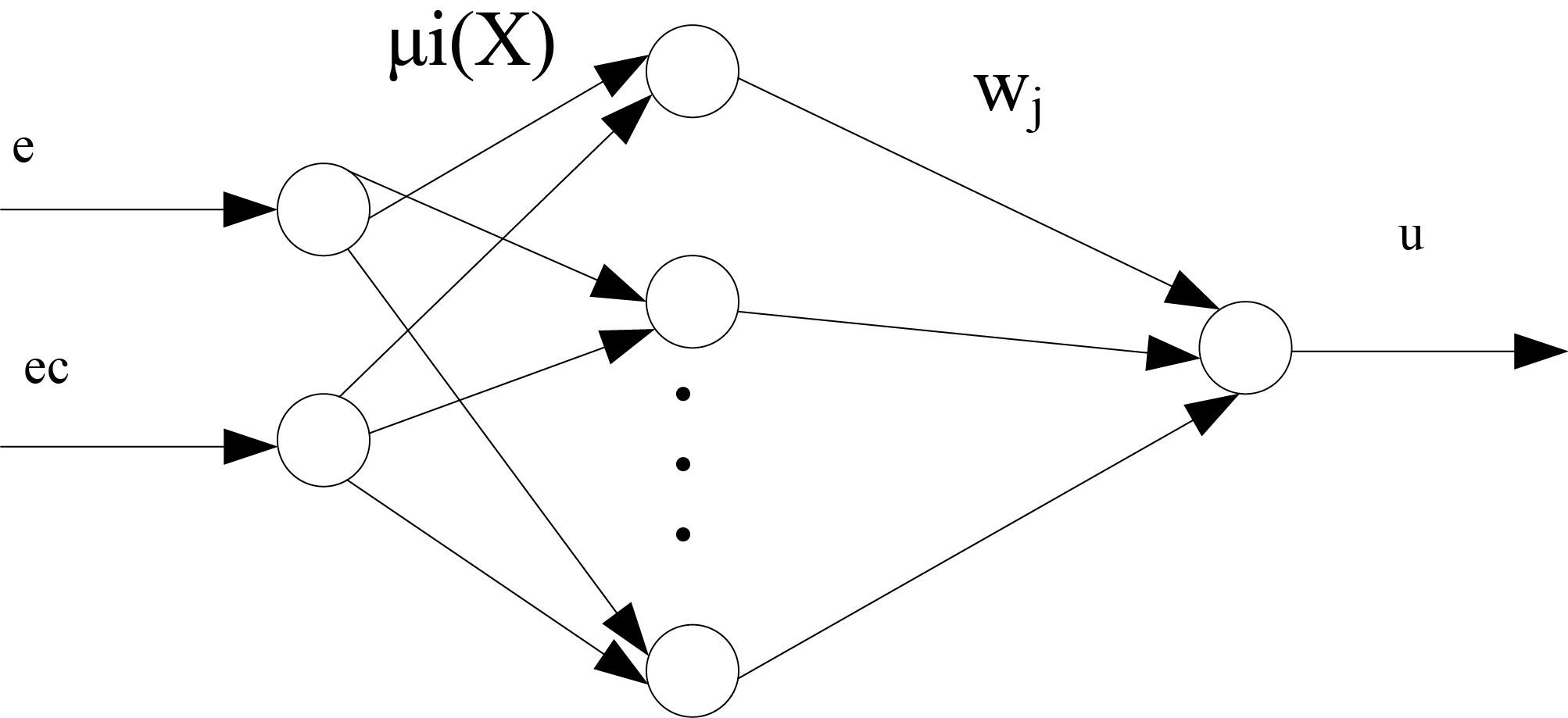
Step response of regular PID control.
The inputs are the error
According to Fig. 3, the inputs and outputs of all the layers of the network can be known:
Input layer: output
Hidden layer: input Output of input layer.
output
Output layer: input Output of hidden layer.
output
where
Comparison of the outputs of the actual object model and the prediction model.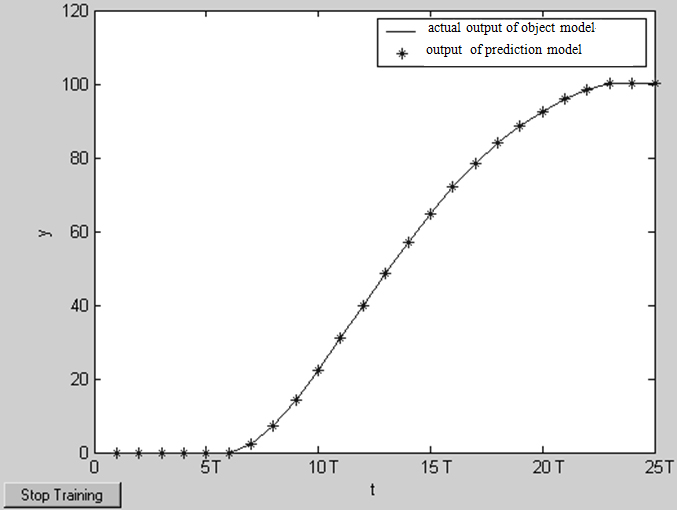
Comparison of the output responses of the two methods.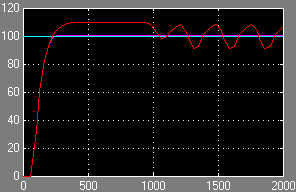
In the process of self adaptation of T-S RBF fuzzy neural network, the center value and weight coefficient of its Gauss function are calculated with gradient descent method:
where
In the equations above,
Usually, there will be various for different system. by online adaptive learning above, the algorithm can run in the host machine. By sensors, collecting effective data online and queue it by timestamp, feed the system and model, the machine will learn the inherent features and adapt the parameters dynamically to fit the system. So the system will be more customized and individually and improve the efficiency of the system.
For the mathematical model
First regular PID control is applied to the time-delay mathematical model using MATLAB/SIMULINK. For the parameters, the following values are assigned after consideration:
Figure 5 is the comparison between the output of the actual object model and that of the prediction model; and Fig. 6 shows the comparison of the output responses of the two methods. From Fig. 5, it can be seen that after the input of a step signal (step value 100) in the controlled object, according to the actual input and output of the controlled object, the highly accurate model of the controlled object can be obtained by building predictive control model of T-S RBF fuzzy neural network. From Fig. 6 it can be seen that with the control of the algorithm, the control process has quick dynamical response (adjusting time is about 330
This paper proposed the adaptive multi-step prediction control system of T-S RBF fuzzy neural network. With the advantages of fuzzy inference model, RBF neural network and multi-step predictive control algorithm integrated, the accurate prediction model of the system was built using T-S RBF fuzzy neural network network, and the controller of T-S RBF fuzzy neural network network was designed, which enabled the adaptive predictive control of complex object. The simulation result shows that the adaptive predictive controller of fuzzy neural network is feasible in that it can build accurate prediction model for the controlled object, reduce the error between network output and sample output, and make the actual output keep in good step with the model output. This fully demonstrates the advantage of the multi-step predictive controller of T-S RBF fuzzy neural network to be applied to any complex nonlinear system. What’s more, it also has high anti-noise performance, robustness, tracking ability and self adaptability.
Footnotes
Acknowledgments
Supported by Applied Basic Research Project of Yunnan Province, 2013FZ098; Project of Yunnan Provincial Education Department, 2015C076Y.