
Abstract
Speckle noises inherently exist in Synthetic Aperture Radar (SAR) image. It reduces the quality of the image and must be removed. Recently, several fuzzy based noise filters have been proposed and it is claimed that they are more superior to the existing state of the art classical filters. However, most of these filters are designed for removing impulse noise. This paper presents a new fuzzy weighted mean filter for SAR images. The weights are computed using fuzzy rules. These rules can differentiate variation in pixel values due to noise and edges. In edge region, the neighboring pixels are assigned with less weight, and thereby preserving the edge pixels. The value of parameters used in defining fuzzy membership functions is determined using Particle Swarm Optimization (PSO) technique. The proposed fuzzy filter is comparatively assessed using Equivalent Number of Looks (ENL), Mean of Ratio (MoR), Signal-to-Noise Ratio (SNR), and Edge-Preservation Factor (EPF) with some of the existing noise removal techniques. It is found that the proposed filter can suppress speckle noise present in SAR images and simultaneously preserve the image details.
Keywords
Introduction
SAR images are formed by coherent interaction of transmitted electromagnetic signals with the target. The reflected echoes are captured and processed to construct images of the target. Echoes from target may be out of phase even though they are coherent in frequency. One of the reasons is the difference in the distance of waves travelling back from the target, caused by multiple bounce due to variations in the surface roughness. The motion of the antenna also changes phase, the phase of each elementary signal changes according to the distance between the target and the antenna [5]. Out of phase waves interfere constructively or destructively to produce stronger or weaker signals. Interference of these out of phase, but coherent wavelets results in the granular pattern known as speckle noise [13, 9]. Consequently the speckle noise consists of bright spots and dark spots. Speckle has the characteristics of a random multiplicative noise [17]. A fully developed speckled image NI can be modeled as
Reducing noise and preserving fine edges present in the images are two important noise suppression considerations, as edges contain most of the important information [15]. It is the balance between these two considerations that determines the success of a filter. Nonlinear filtering techniques are preferred because they provide better results in suppressing noise and preserving edges present in the image than linear methods [18]. Some of the classical nonlinear speckle noise filtering techniques includes median filter, non-local mean filter, Lee filter, Frost filter and Weiner filter. Median filtering is based on a window which slides over each pixel in the image and replaces the central pixel by the median of neighboring pixel value [11]. Non-local mean filter computes the mean of all pixels in the image, weighted by how similar these pixels are to the target pixel. Non-local mean [1] filter improves the results by giving a greater post-filtering clarity, and less loss of detail in the image compared with mean filter. The Lee filter [14] computes mean and variance within each window. In the areas of low signal activity estimated pixel approaches local mean, whereas in the areas of high signal activity (like edge) estimated pixel favors noisy pixel, thus retaining the edge information. The Frost filter [26] updates the central pixel with a weighted sum calculated based on the distance from filter center, damping factor and local variance. Wiener Filter [2] is based on least squared principle; it minimizes the Mean Square Error (MSE) between the actual output and the desired output. Both global statistics and local statistics are used in Wiener filtering. Soft-computing techniques like artificial neural network [28], support vector machine [22], particle swarm optimization [27] and genetic algorithm [30] are gaining popularity in reducing noise from images as they are intelligent (can be trained) and robust in filtering noise.
The image formed by SAR is a 2-D projection of a 3-D natural surface and some amount of imprecision is inherent in the images. The amount of noise and distribution of noise in SAR images is unpredictable. Due to the presence of noise, it is also confusing to determine an edge in SAR image [10]. Therefore, a noise filtering system needs to be capable of resolving vague and uncertain information. Fuzzy sets are capable of handling uncertainty associated with vagueness and imprecision in information. In classical set theory, the membership of elements in a set is 1 if the element belongs or 0 if it does not belong to the set. Fuzzy set theory permits partial membership of elements (value can be real) in the interval [0, 1]. A membership function maps each point in the input space to a membership value. Fuzzy logic uses IF-THEN rule for taking decisions. Generally fuzzy IF-THEN rules are written as “IF p is Q THEN r is S”, where Q and S are membership functions. Fuzzy rule allows dealing complex problem in a simpler way by using linguistic terms.
Recently, various fuzzy based nonlinear noise filters have been proposed. However, most of the existing fuzzy filters are developed for removing impulse noise. FIRE (Fuzzy Inference Ruled by Else-action) filter proposed by Russo [7] is based on IF-THEN-ELSE reasoning. FIRE filter uses the pixel intensity difference between the central pixel (to be filtered) and its neighbors denoted by
The output of fuzzy filters depends on the fuzzy rules, the notion of fuzzy sets (membership function), parameter used in defining the membership function and the defuzzification process. Generally, one of the main issues in designing fuzzy filter is determining the parameters used in defining the fuzzy membership function. These parameters are either determined by using trial and error method or by using an optimization algorithm. The proposed fuzzy based speckle noise filter uses PSO to determine these parameters. PSO is a computational method that optimizes a solution by iteratively improving the candidate solution [6, 29]. PSO is robust and fast in solving nonlinear, non-differentiable and multi-modal problems [12].
Fuzzy speckle noise filter
The proposed fuzzy filter differentiates pixel variation due to noise and edges. In an edge region the neighboring pixels are given less weight in computing the weighted mean, with an intention to preserve the image structure such as fine edges. The proposed filter consists of fuzzy rules, which are based on the observation that the speckle noise corrupted pixels are different from its neighbors. Consider the moving window shown in Fig. 1.
Relationship of the pixel to be filtered 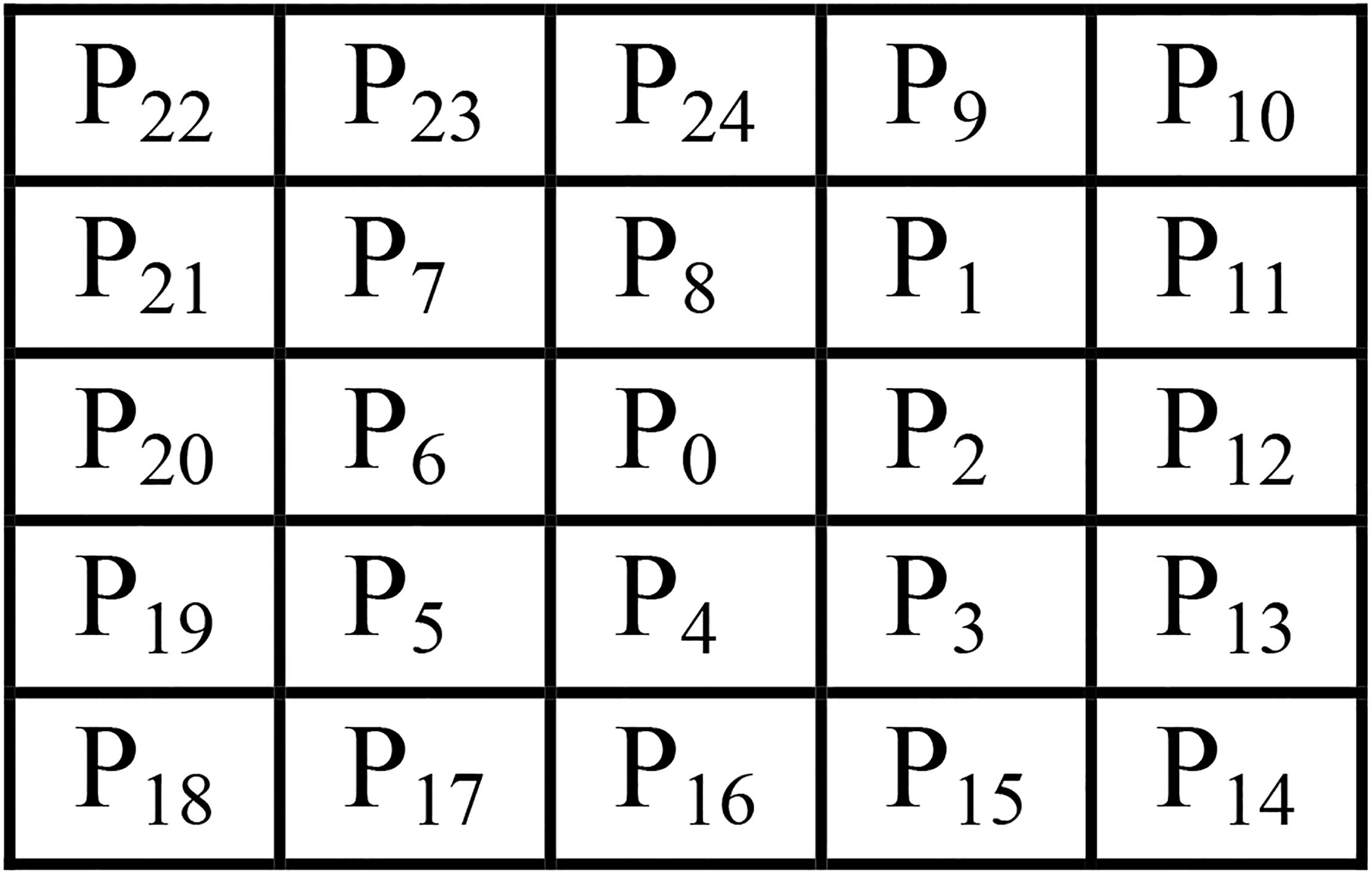
If the difference between the pixel intensity to be filtered (
Rule 1: If
Where
Pixels involved in determining edges.
From the preceding discussions, we can develop fuzzy rules that separate noisy pixels and edges.
Rule 2(a): If
SMALL is a fuzzy membership function defined in Eq. (2). We can formulate eight such rules for all
Rule 3(a): If
Rule 3 is based on the perception that if the difference between the immediate neighbor and the relative neighbor is large, then there is a very high probability of the pixel
Where
Where
Graphical representation of SMALL and LARGE.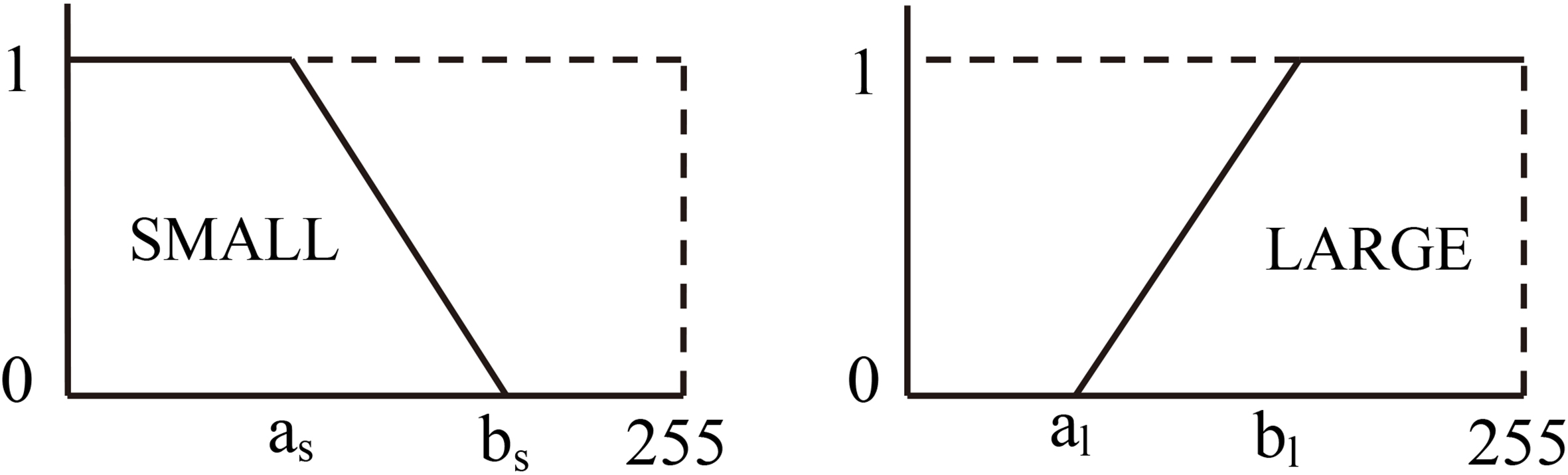
The result (
Where the weight
Where
One of the most difficult tasks while working with fuzzy system is determining the appropriate membership functions and the associated parameters. Result of fuzzy system depend largely on these problem oriented parameters and usually determined using trial and error or optimization algorithm. Membership functions defined in Eqs (1) and (2) are suitable for LARGE and SMALL. The degree of membership for a value in the set LARGE (refer Fig. 3) increases with the increase in input values of
PSO was developed by James Kennedy and Russell Eberhat after being inspired by the bird flocking behavior [20].
[h] Steps involved in PSO[1]
while
end while
while MAXIT
while i
end if
if Pbest[i]
Gbest
end if
end while
while i
end while
end while
In Algorithm 1,
[h] Fitness function[1]
CI
NI
FI
return err
end procedure
Where
PSO is based on supervised learning approach. The objective is to find the best possible parameter which will give the highest fitness value. Once the parameters associated with membership functions LARGE and SMALL are determined, the proposed fuzzy speckle noise filter can be used for filtering speckle noises from similar SAR images.
The dataset that we have considered in comparing the SAR despecking filters are downloaded from
Homogeneous: a flat region with constant electromagnetic parameters shown in Fig. 4a Digital elevation model (DEM): a non flat orography region with constant electromagnetic parameters shown in Fig. 4b Squares: Several regions on flat terrain, separated by straight contours having different electromagnetic parameters shown in Fig. 4c Corner: a reflector placed on a homogeneous background shown in Fig. 4d Building: an isolated building placed on a homogeneous background shown in Fig. 4e
Elementary scenes encountered in typical SAR images. (a) Homogeneous. (b) DEM. (c) Square. (d) Corner. (e) Building.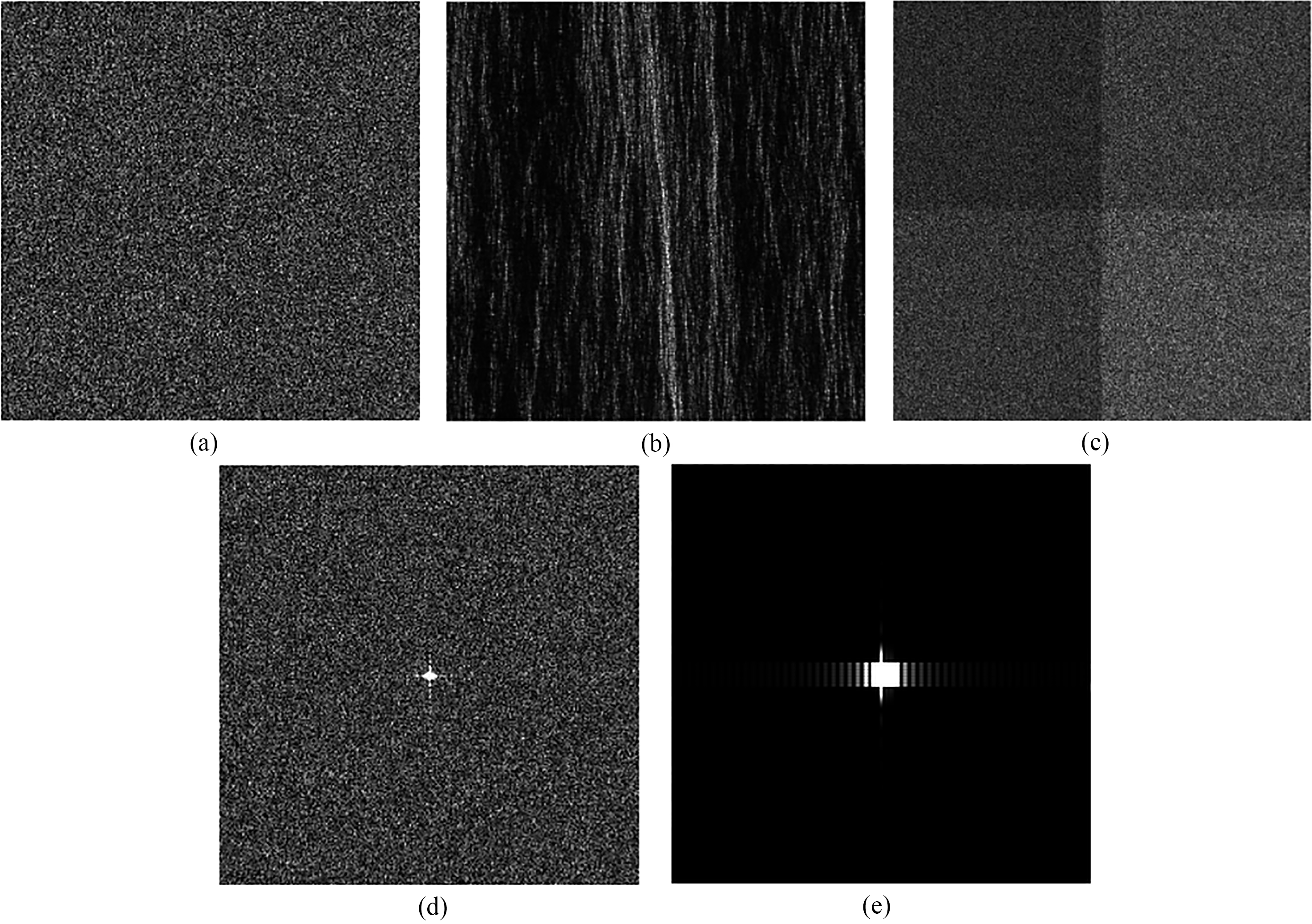
The SAR images available in
Clean reference images. (a) Homogeneous. (b) DEM. (c) Square. (d) Corner. (e) Building.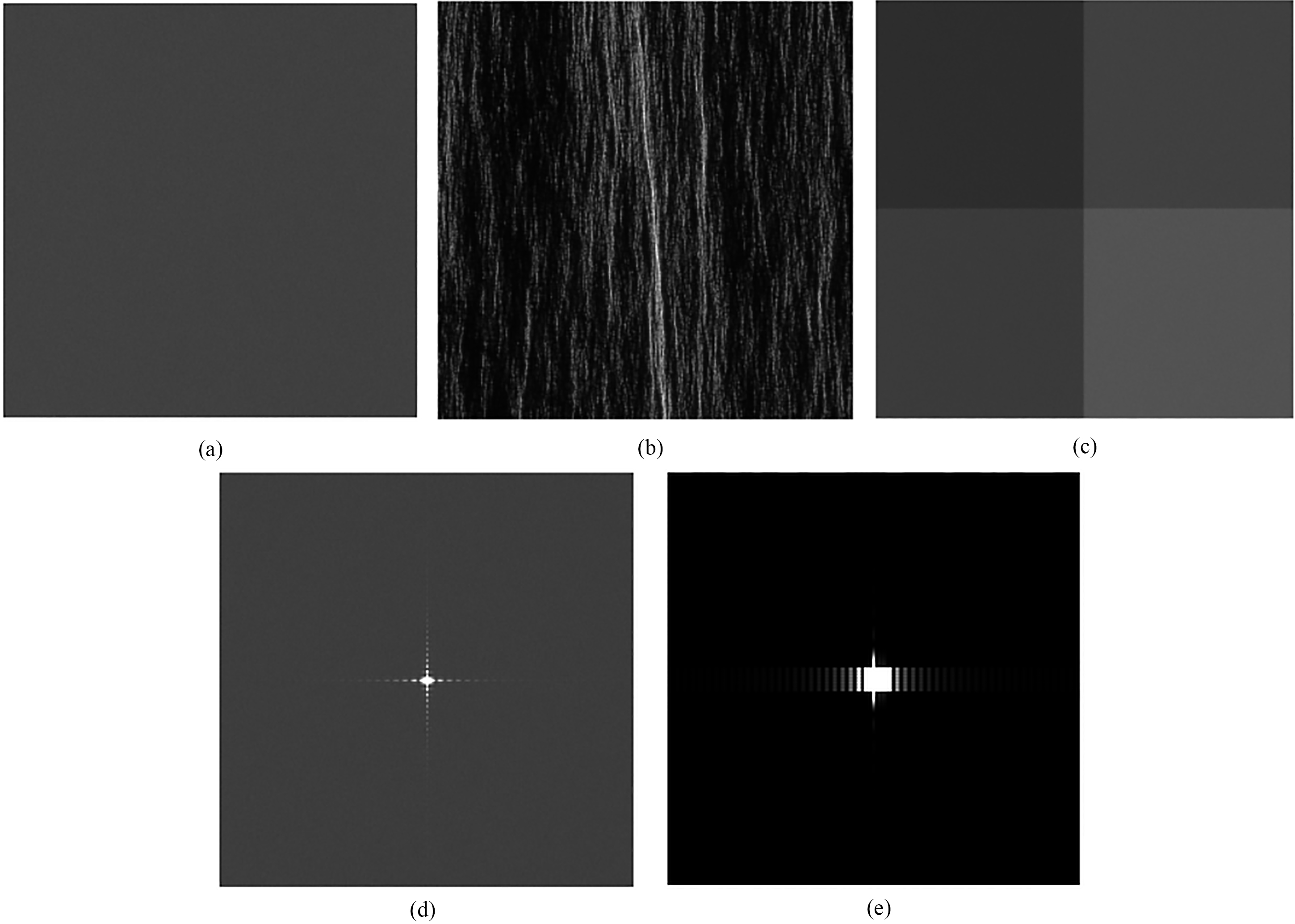
The proposed fuzzy filter is implemented in two phases; training and testing. The training phase adopts a supervised learning approach, and the objective is to determine the value of parameters
The performance of the proposed fuzzy filter is comparatively evaluated with some of the existing classical and fuzzy based filters. We have considered classical mean, non-local mean, median, Frost, fuzzy FIRE, TMAV, ATMAV and ATMED filter for comparisons. All implemented filters are based on 3
Where
The closer value of CI and FI will give larger SNR. EPF measures the ability to preserve the details after filtering the image [12]. EPF is computed using the following formula:
Where
Table 1 presents the result of filtering homogeneous area in Fig. 4a by different filters. The randomness in the homogeneous regions is caused by speckle. By determining the ENL, MoR and SNR in a homogeneous region one can analyze the speckle suppression capability, radiometric preservation and closeness of the filter image to the ideal clean image.
Result for homogeneous region
From the experimental result presented in Table 1, it is observed that the proposed filter is capable of the suppressing speckle noise as it has high ENL in homogeneous region. It improves the signal quality of image since the SNR is increased after filtering. And it also preserves the radiometric as there is no significant deviation from one in MoR. Figure 6a shows the result of filtering Fig. 4a using the proposed filter. The Non-local mean filter performs slightly better than the proposed filter for all the measures in a perfectly homogeneous area. In Table 1, the proposed fuzzy filter clearly outperforms the classical fuzzy filters, frost, mean and median in filtering speckle noise. In DEM, signal variations occur at different scales. Differentiating speckle from edges of different size and orientation is challenging. Table 2 shows the performance of the filtering DEM Fig. 4b.
Despeckle images using proposed filter. (a) Homogeneous. (b) DEM. (c) Square. (d) Corner. (e) Building.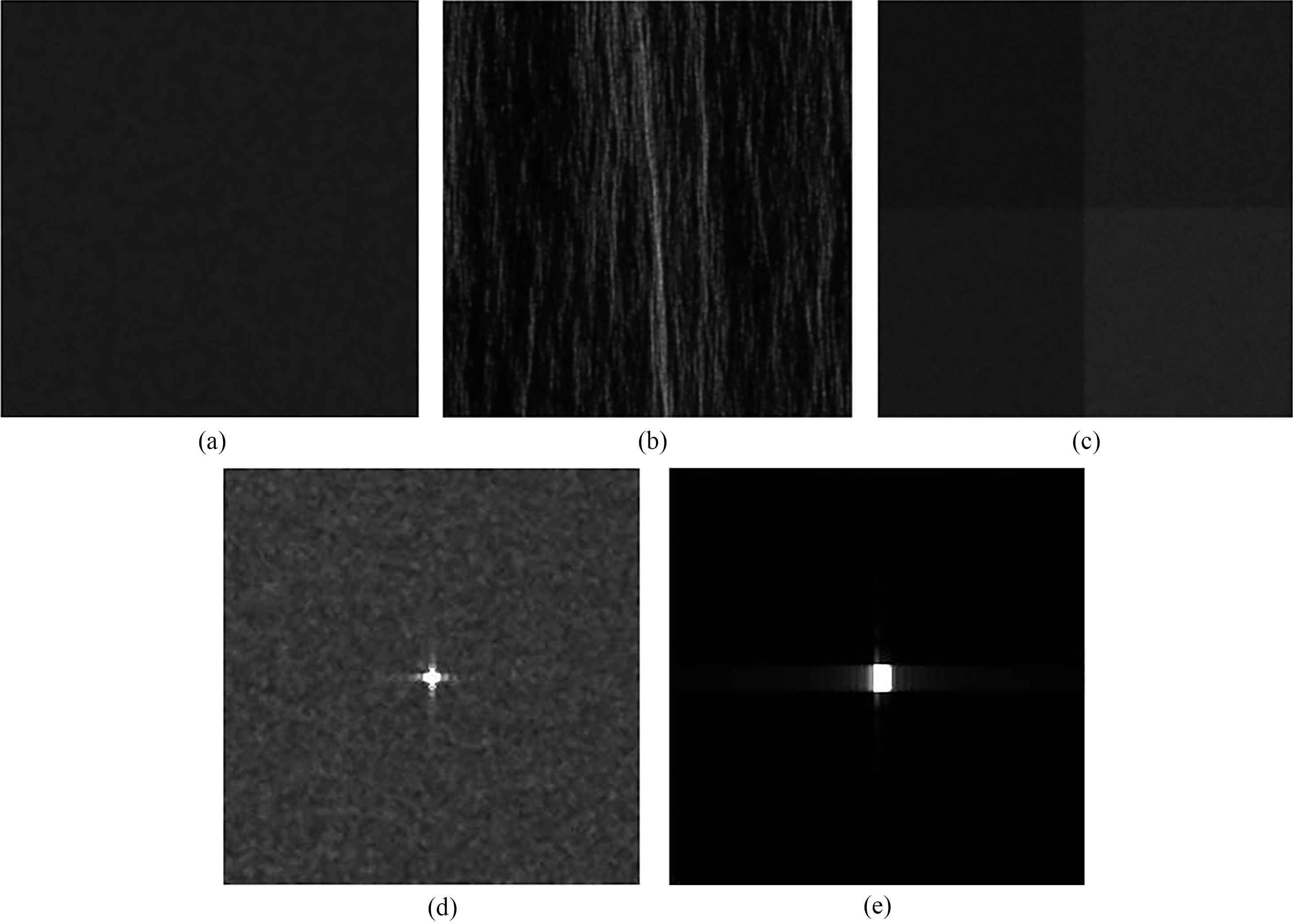
Result for DEM
In Table 2, looking at the EPF value the proposed filter preserve the edges present in the noisy image, it even improves the edges with a small amount. There is no significant deviation in MoR. However, the SNR has reduced after filtering. The fuzzy FIRE filter too preserves the edges, but reduces the SNR. The Frost filter improves the quality (SNR) of the images but distort edges. Other filters do not perform well in filtering DEM image containing complex signal variations. Filtered image of DEM using the proposed filter is shown in Fig. 6b.
Result for square
Table 3 presents the result of filtering square image. It can be observed that all the filters except mean and median preserve strong edges. All the filters except FIRE filter improve the SNR after filtering. There is a significant deviation of MoR in median and TMAV filtered image. The proposed filter reconstructs strong edges and improves the quality of images with an insignificant deviation of MoR. The filtered image shown in Fig. 6c has smooth reconstructed edges.
Result for corner
Result for building
Pentagon SAR image. (a) Clean. (b) Noisy. (c) Mean. (d) Median. (e) NL mean. (f) ATMAV. (g) ATMED. (h) FIRE. (i) Frost. (j) TMAV. (k) Proposed.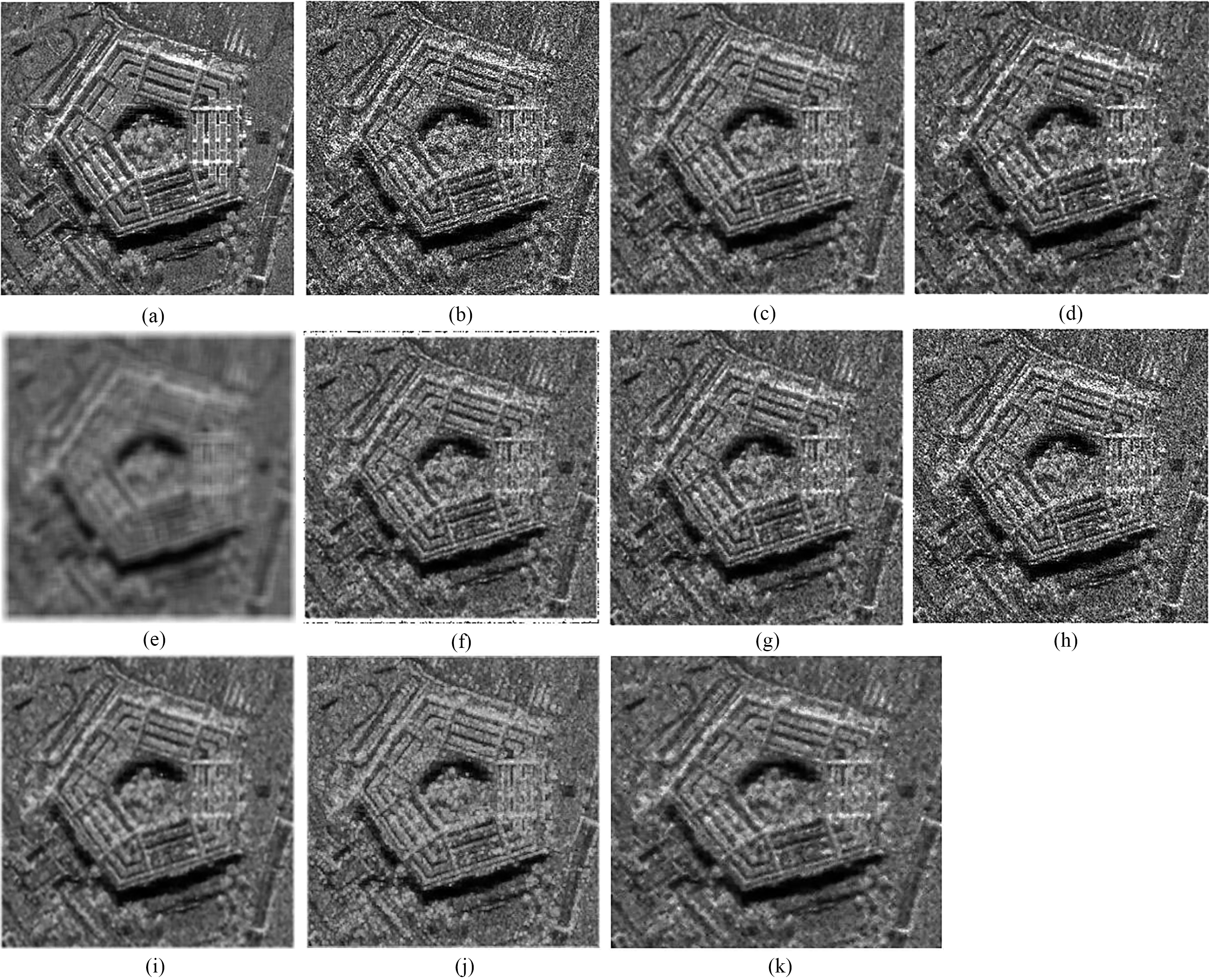
Result for pentagon
The performance of filtering corner image shown in Fig. 4d is presented in Table 4. The TMAV reconstruct edges, but at the cost of radiometric distortion. Mean, median, ATMAV and ATMED does not preserve edges in corner image. The local mean filter improves the SNR significantly. The image shown in Fig. 5d is the filtered image using the proposed approach. It can be seen that the speckle noise are suppressed, but the side lobe could not be reconstructed as the filter is not able to differentiate the thin and fragmented lines from noise.
Table 5 presents the performance of filtering building image shown Fig. 4e, it is a very high resolution image simulated considering the reflection from nearby building walls and rough terrain with double and triple reflections. The reflection lines can be used for estimating the height of the building; therefore it is important to preserve the radiometric after filtering. The proposed filter and non-local mean preserve the radiometric after despeckling as there is a very small deviation of MoR from one. The reflection lines in filtered image Fig. 6e is still visible. It is also worth mentioning that the Mean, median, TMAV and ATMAV does not preserve edges.
It is a general observation that the non-local filter perform well in images containing large homogeneous region, but it is not suitable for using in complex image like DEM with many edges of different shape and size. The proposed fuzzy filter can suppress speckle noise and preserve edges with a negligible deviation of MoR from one in all the images shown in Fig. 4. It performs much better than the classical fuzzy filters in suppressing speckle noise from SAR images.
Figure 7a shows a clean pentagon SAR image, Fig. 7b is the speckle noise corrupted image and Fig. 7c–k are the images filtered by the filters considered in this work. It can be observed in Fig. 7k that the proposed filter can suppress speckle noise after filtering. The filtered image is slightly blurred due to distortion of very small details, but the strong edges are preserved, differentiating noise form details of size one or two pixels is extremely difficult. Table 6 shows the result of filtering pentagon image. It is clear from the result that the proposed filter improves the quality of images and preserved the strong edges in the filtered image.
A fuzzy based weighted mean filter is presented in this article. The weights are computed using fuzzy rules and the membership function parameters used for defining the rules are determined using PSO. Proposed filter is comparatively evaluated with some of the existing noise filters. We have adopted ENL, MoR, SNR and EPF for quantitative analysis of the results and found convincing results on common elementary scenes encountered in typical SAR images. The proposed filter suppresses speckle noise and also preserves edges in the filtered image.