
Abstract
The vibration quality has been widely used to measure the stability of vehicle operation. In this paper, the healthy condition of the fire robot was determined after the precise Sperling Index of the vibration quality was determined by acceleration and frequency. A method of measuring robot vibration based on virtual instrument technology has also been proposed. The relation between dominant frequency and engine speed has been discussed, and a new divided grades of vibration quality based on the Sperling Index has been found for judging healthy condition of the robot.
Introduction
Fire robot, which is a new type of fire-fighting equipment, have been widely used in fire-fighting, smoke exhausting, and scout, fire robots must face uncertain fire conditions and rugged roads [1]. The appearance of intelligent fire protection robot has greatly reduced the loss of national property and the degree of casualties of firefighters. Fire robots can replace fire rescue personnel to enter the scene of flammable, explosive, toxic, anoxic, smoke and other dangerous disasters and accidents to collect, process and feedback data, and effectively solve the personal safety faced by firefighters in the above-mentioned places. Insufficient data collection and other problems. According to the feedback result, the field commander can make a scientific judgment on the disaster situation in time, and make a correct and reasonable decision on the field work of the disaster accident. As a complex mechanical device, many mechanical failures, such as fasteners or loose transmission belts, may occasionally occur on it. These invisible failures reduce operational reliability and increase operational uncertainty, leading to many accidents and serious consequences. These invisible failures reduce operational reliability and increase operational uncertainty, leading to many accidents and serious consequences. Therefore, it was necessary to establish a vibration quality system to characterize its operational reliability.
As we know, vibration spectrum anomalies often lead to machine failures. The mechanical vibration characteristic shows the running stability index, and the Sperling index [1] which is the most common index in running stability, has different weighted coefficients with different frequencies. The sensitive frequencies have large coefficients, and in those sensitive frequencies, the vibration factor have be amplified, and the degree of comfort also played a important role in those vibration quality systems. In some relevant international studies, the design of robot visual servo controller based on neural network not only simplifies the complexity of image Jacobi matrix and hand eye calibration, but also has good real-time performance and generalization ability [2]. Covariance intersection multirobot object tracking algorithm based on self-adaption SR-CKF can effectively solve the problems in multirobot synergetic objects tracking in unknown environment [3].
This paper focuses on the Sperling Index of fire robot. The vibration acceleration signal spectrum has been discussed and spectrum characteristics are analyzed, a vibration quality benchmark based on acceleration and frequency is proposed. The relationship between the dominant frequency and the engine speed is discussed.
Mechanical vibration and operation quality
The operation quality of the equipment refers to the reliability, smoothness and comfort of the machine during operation [4]. The specific performance is the vibration level, the failure rate of the equipment and the subjective feeling of the person, which represents the life cycle of the product. Any mechanical device must be in a quality recession step by step. The equipment has high reliability and good running quality. Over time, the device may fail. In this case, although the equipment is running normally, the normal motion can be completed, but the mechanical vibration increases. Without active maintenance or maintenance measures, the state of the equipment will drop sharply until the device has a functional loss or malfunction risk.
Mechanical vibration refers to the physical vibration of the device, which characterizes the operation of the device and can reflect the operating status of the device. At the same time, the device vibration has one objective physical rule corresponding to the fault of the device. Either type of fault maps a specific vibration Features, operating quality and equipment vibration, breakdown between complex and clear interrelationship. It can be said that the operation of good quality equipment has high reliability for internal components, small vibration and no abnormal vibration. The equipment with poor operation quality has the mechanical vibration abnormalities.
As a kind of special-purpose automation equipment, the fire robot has no manned function, and its running quality does not need to consider the comfort factor. Therefore, the running quality of the fire robot includes the running stability of the fire robot and the reliability factor, and is mainly used to characterize the operating status and life cycle of the fire robot.
Because of the complex internal structure of the fire robot, there could be a large number of failure points. So the vibration signal contains a large number of malfunctions, and it is difficult to extract, separate and extract the signals if the fire robot is analyzed one by one. Therefore, this paper introduces the commonly used Sperling indicators commonly used in the current evaluation of the operation of the stability, qualitative, quantitative, fixed frequency comparison of different states of the fire robot vibration severity, to characterize its operational quality. Sperling indicators are often used in passenger cars, trains and other manned machinery operating quality assessment.
The main focus of this index is the subjective feeling of human beings, which represents the stability and comfort of the manned equipment. In the formula, the main expression is to absorb and amplify the more sensitive human vibration frequency and amplitude. In view of the fact that there are no firefighters carrying personnel, this article will repair the equation of Sperling’s index, draw the more sensitive frequency and amplitude of the mechanical components of the fire robot, and then obtain the running quality of the fire robot based on the modified Sperling index, Robot reliability and life cycle.
Experimental platform
Mechanical vibration signals mainly include displacement, acceleration and noise, because the acceleration signal can directly reflect the change of the excitation force, it can directly reflect the stability factor, which is directly related to the running quality. Therefore, the vibration test system in this essay is mainly used to measure the vibration acceleration signal of fire robot.
An experimental platform using IEPE acceleration sensor and data acquisition card has been established. As shown in Figs 1 and 2, the experimental platform composed of robot and IEPE acceleration sensors and data acquisition card and computer, the high-precision acceleration sensors (IEPE acceleration sensor) which with the power amplifier or voltage amplifier are tied to robot to measure the vibration acceleration signal of fire robot; data acquisition card collects the sensors signals and communicates with computer by USB, and the A/D conversion of the acceleration signal through data acquisition card is converted into digital signal flow into the computer, then computer uses the Labview software to filter and analyze the acceleration signal and calculate the operation quality of the fire robot.
Photo of the experimental platform.
The structure of experimental platform.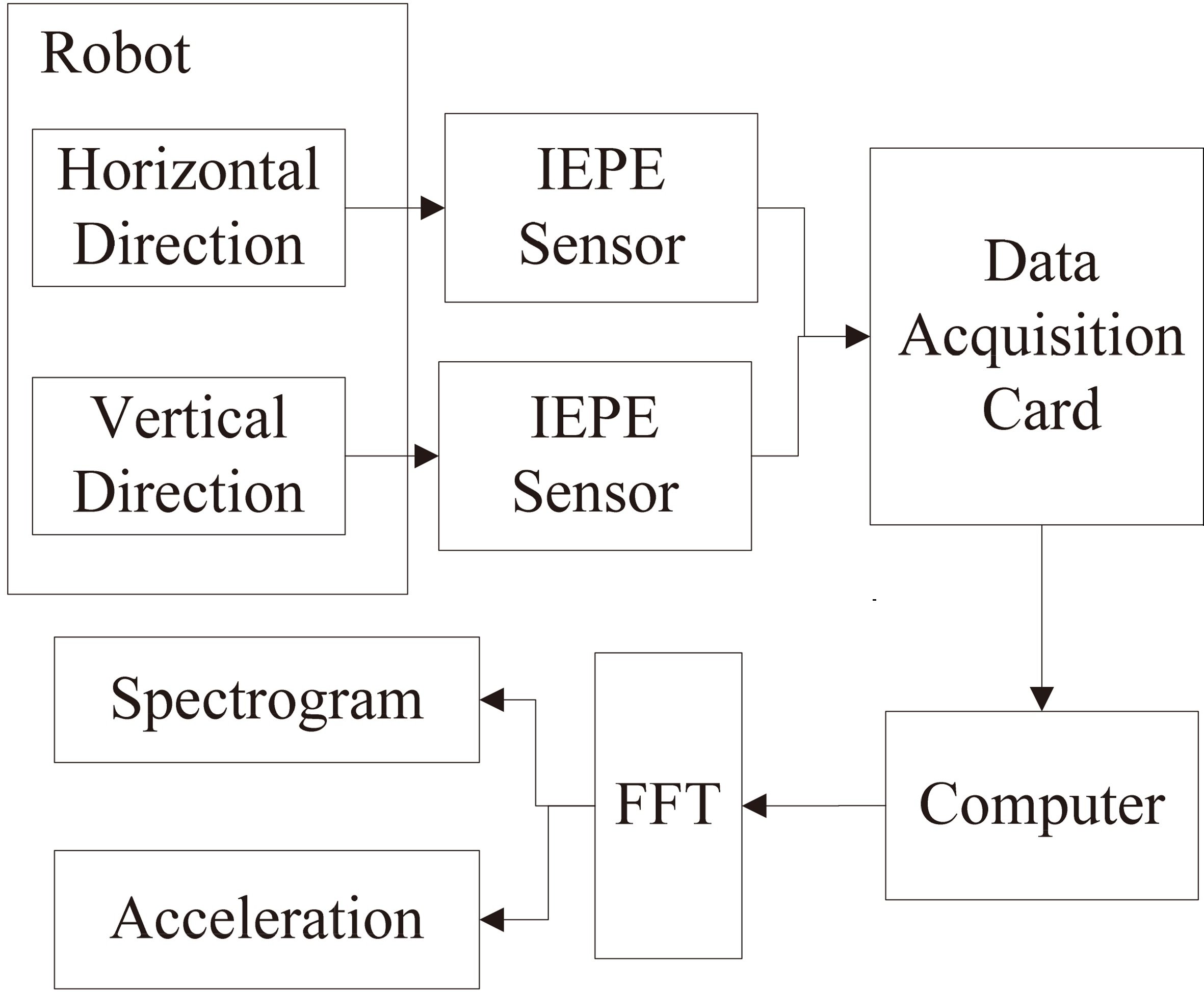
Acceleration signals are acquainted and a signal analysis system based on FFT has been found, and the spectrum estimations are showed on screen.
As the robot’s vibration direction is uncertainty, and the sensor has certainty direction, we decompose the vibration into horizontal direction and vertical direction; two sensors are mounted on robot’s engine (because the vibration of engine is the most violent in robot) in such two directions [5].
After the fire robot starts, the vibration of engine mainly comes from the reciprocating movement of the piston, the reciprocating motion of the piston in the engine cylinder will cause the excitation force
Where
Because the vibration excitation inside the fire robot is mainly caused by eccentric rotational inertial force, such vibration can be simplified as simple harmonic excitation, and the vibration equation of the vertical direction of fire robot is [7]:
Where the mass
Solve this equation, can get the vibration equation of the engine
As the engine of robot has three-cylinder, according to the Eqs (1) and (3), this essay measured the vibration frequency of the engine and the mobile carrier of fire robot engine under different engine speed through the experiment, the experimental data as shown in Table 1, there is a linear relation between dominant frequency and engine speed [8, 9], so are the harmonics. Once the speed is determined, the harmonics’ frequencies are determined. And the experiments have testified this. Figure 3 is shown the linear relation between dominant frequency and engine speed using the experimental data. So the comparison of running stability index under determined speed is significance.
The experimental data about engine speed and dominant frequency
The linear relation between dominant frequency and engine speed.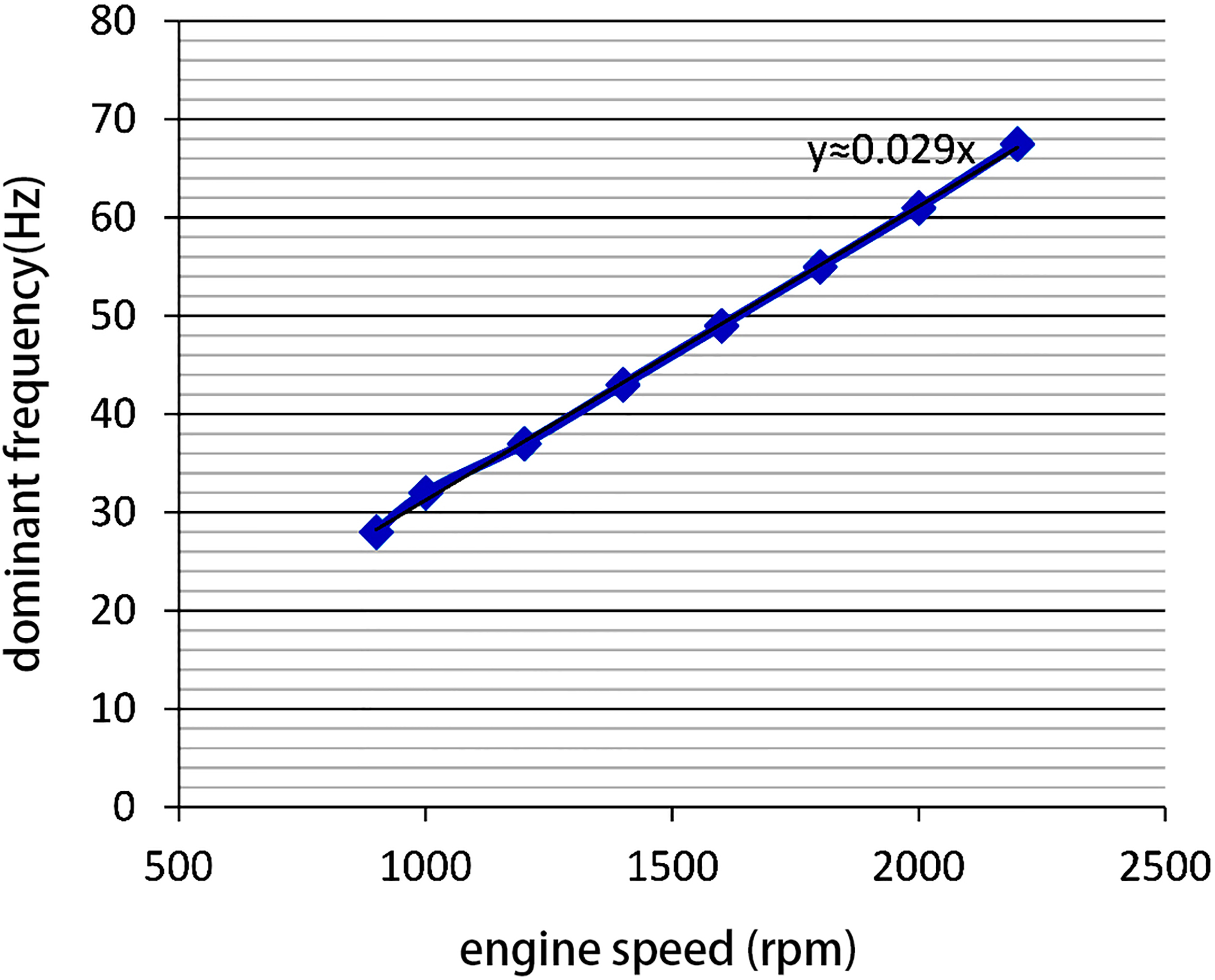
The vibration of robot is caused by external factors and internal factors [10], the external factors such as bumpy road, sound wave in the air, are unconcerned and cannot be forecasted, so in the analysis on acceleration signal, we ignore the external factors, and the internal factors such as revolution of engine play the most important role in running stability. For removing the external factors interference, we collect the acceleration signal in such conditions: the robot has been started up but still in static state on the horizontal platform, the engine speed is 1600 rpm, which is the robot’s operating speed, sensors are mounted on engine in horizontal direction and vertical direction, the sampling rate is 1 kHz, and the sampling number is 1000.
The fire robot is composed by the engine and chassis, and the engine is mounted on the chassis with spring shock absorber. So the vibration of robot can been simplified as a forced vibration system, which is a 2-dof system under harmonic excitation in two directions [11].
The harmonic excitation is caused by the revolution of engine or other revolute pairs [12], so the vibration signal is superposition of several simple harmonic waves, the equation of vibration signal
Where
Experimental results verified the Eq. (5). Figure 4 is shown the vibration signal of a new robot in horizontal direction, and Fig. 5 is the spectrum of the signal, from the spectrum we can see that the signal is composed of several harmonic component, the dominant frequency and primary harmonic are significant, as they are caused by the engine shaft, and those tiny harmonics are caused by the gears mesh and belt transmission [14].
The vibration signal in horizontal direction.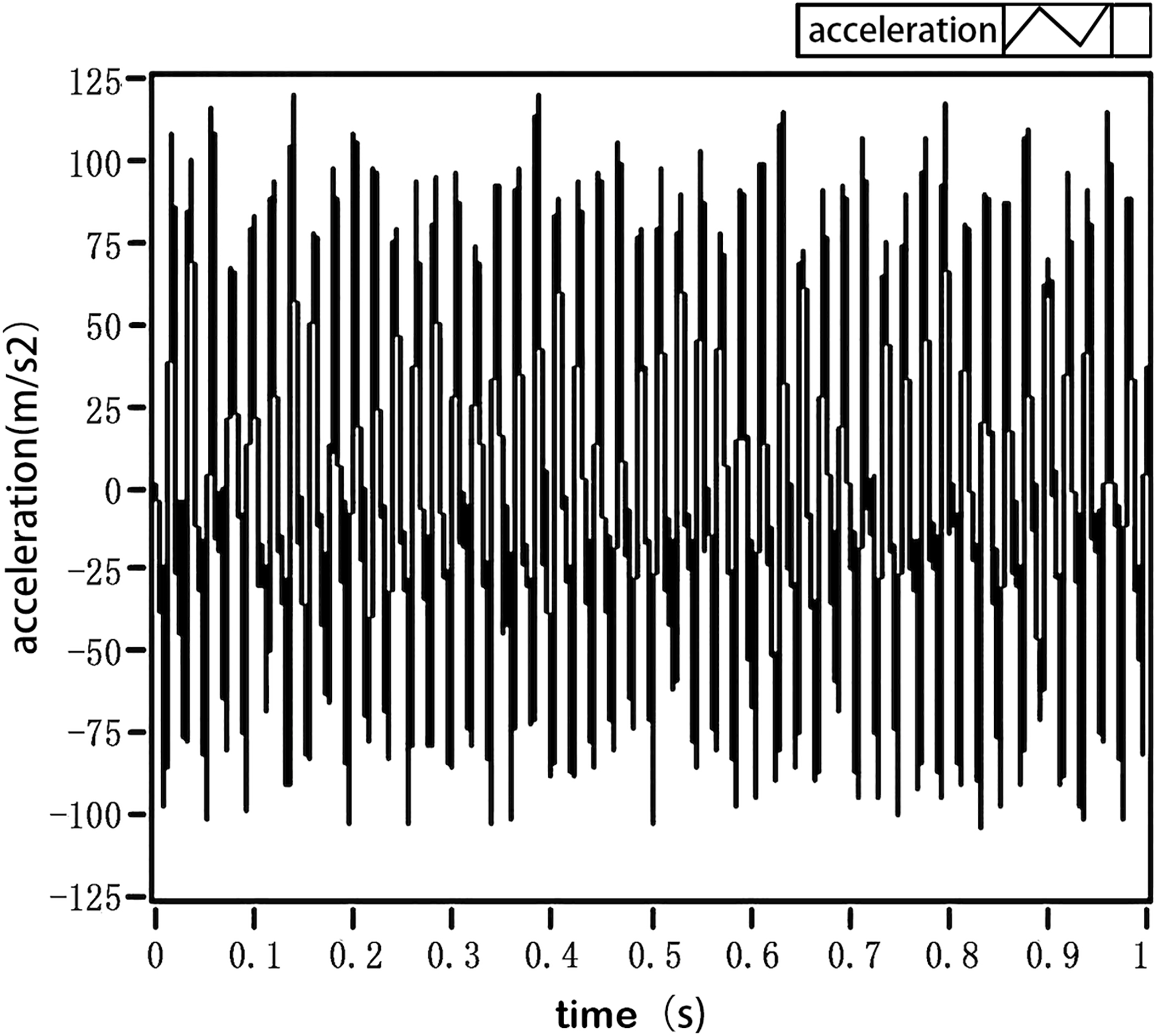
The vibration spectrum in horizontal direction.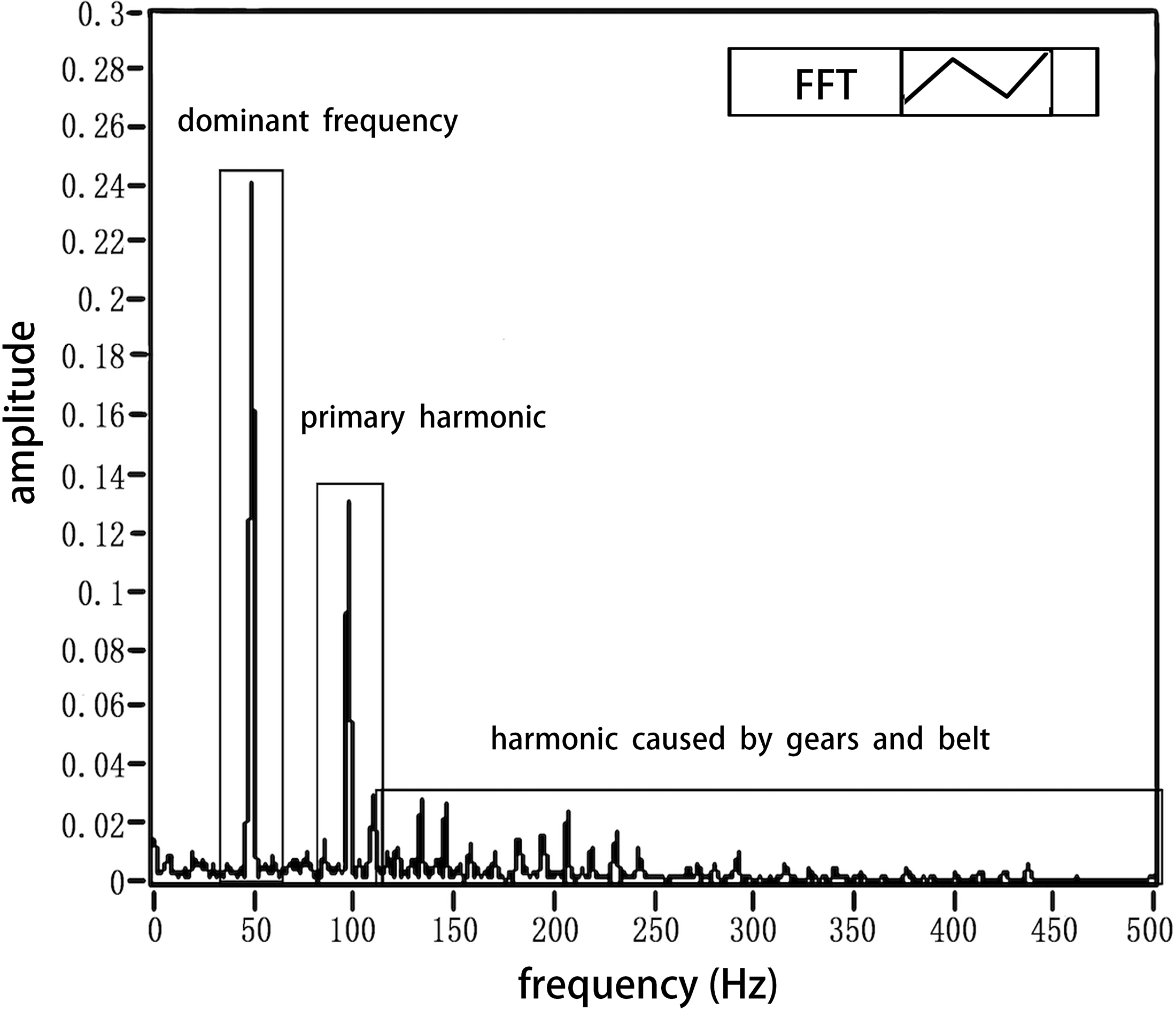
The third derivative of displacement can represent the change of force, which is an important factor of the stability, and the third derivative of
Its extreme value is:
The maximum acceleration is also obtained:
For fixed frequency
Where
Sperling index
On the basis of a large number of experiments, many people have been amended the operation stability formula in different fields. The most widely used Sperling index is used to determine the comfort degree of the manned locomotive, and its definition expression is as follows:
Where
The Sperling index is mainly applied to the manned train. By measuring the vibration frequency and the amplitude of the manned equipment, the subjective comfort and operation quality are judged. These two kinds of judgment are all subjective feelings about mechanical vibration,and take into account the more sensitive vibration frequency and amplitude of the human.
But this kind of fire-fighting robot has no manned function, so it needs to be modified to show the operation quality of the fire-fighting robot. This article only discusses the sensitivity of vibration frequency and amplitude, and the influence of vibration on the robot itself, without regard to the subjective feeling of people, and consider the fire robot are more sensitive to vibration frequency band. The Sperling index function of the fire robot is:
In addition, the Sperling index of the normal operating mechanical equipment corresponds to 0
In this essay, the operation quality of fire-fighting robot is based on Sperling index, so a complete set of Sperling index measurement procedure is required. In the Sperling index definition of fire robot, the frequency and the weight coefficient are needed besides the acceleration value. This essay establishes Sperling index programs suitable for fire-fighting robots based on Eq. (11) by Labview software, and some screenshots of the program is shown in Figs 6 and 7.
Based on the method of Sperling index, and several contrast experiments of running stability index has been made, the test results are shown in Table 2.
The running stability index experiments
The running stability index experiments
Screenshots after CWT.
Screenshots after STFT.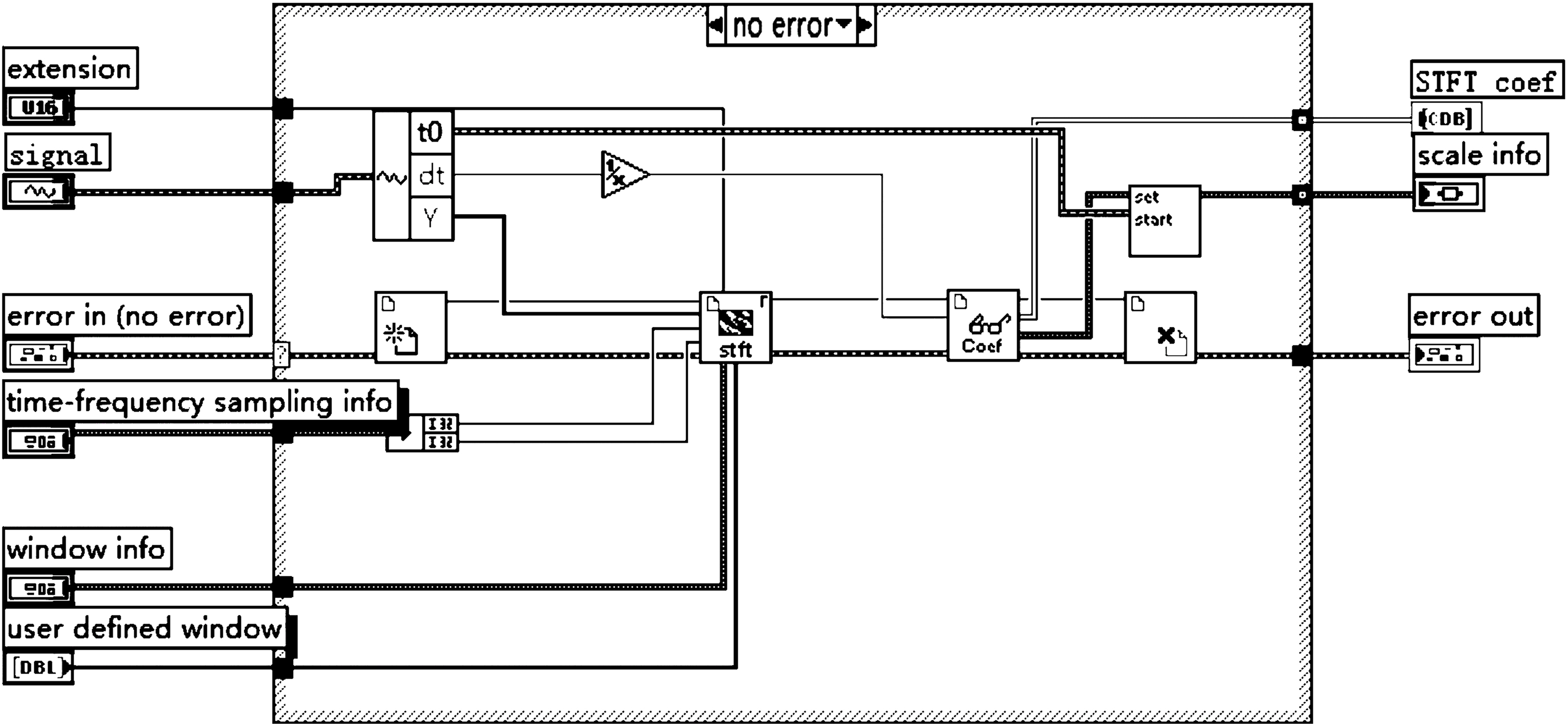
As shown in Table 2, the running stability index does characterize the mechanical failures, which reflect the operation reliability. With the increase of the service time of the robot, the matching degree of the parts decreases gradually, and the Sperling Index of the robot increases. Meanwhile, from the test results, we can also find that compared with belt loosening, the fastener loosening robot has a higher Sperling Index. The index of a fault robot has a lager value. Therefore, the index size can be used to define the vibration quality level of fire robot The grades in detail are shown in Table 3.
The grades of fire smoke exhausting robots vibration quality
In this study, the vibration of fire robot has been discussed, the relationship between dominant frequency and engine speed has been confirmed. A practical and feasible method for calculating the Sperling Index is established. In this method, with the attention about the mechanical wear and mechanical failure, a set of method for measuring the vibration of robot based on virtual instrument technology has also been proposed. According to several experiment results a new divided grades of vibration quality based on the Sperling Index which are has been divided into four grades (nice, good, decline phase and damaged) has been found for judging healthy condition of the robot. This new method can evaluate the vibration quality of fire robot more quickly and accurately.
Footnotes
Acknowledgments
The research is funded partially by Key Research Project of College Natural Science in Anhui Province (KJ2017A703), Quality Project of Anhui Province (2016ckjh124 and 2014msgzs170).