
Abstract
Aiming at nonlinear, large delayed time and large load variation characteristics of chemical dosing system in power plants, a PID (Proportional Integral Differential) algorithm with neural network based on multi-model switching and improved Smith pre-compensation is proposed. The algorithm uses Smith pre-compensation to deal with the large delayed time, and uses RBF (Radical Basis Function) neural network to adjust PID parameters to deal with the nonlinear. The multi-model switching control strategy is also adopted to transform the highly nonlinear dosing system of power plant into several linearized sub-models according to load ranges, which overcomes the difficult problem of large load variation and disturbance. To reduce transition time and fluctuations caused by model switching, an improved Smith pre-compensation controller for multi-model switching is proposed, where two parallel Smith predictors are added to the Smith pre-compensation part. The three Smith predictors can match three mathematical sub-models of the control system well. Finally, to improve control effects, genetic algorithm is adopted to automatically optimize the parameters. These simulation results show that the control strategy can obtain higher robustness and steadiness.
Keywords
Introduction
Electric power industry is the key and leading industry of national economic development strategy, and its development is very important to prosperity and stability of our economy and society. In next period, with the advancement of industrialization and urbanization in our country, electricity consumption is increasing rapidly. Along with the advanced study of environment protection and saving energy technology, nontraditional renewable energy has alleviated some of the demand for electricity comes up in recent years. But traditional thermal power still occupies an important position in power energy composition. With the development of electric power industry, more and more high parameter and large capacity thermal power units have been completed or under construction, which also makes more rigor requirements for steam and water quality. Due to high parameter unit is more sensitive to steam and water quality. If steam and water quality is not good enough, the thermal equipment will be corroded, fouled, and accumulated with salt, even causing the boiler “four tube” explosive leakage, thus affecting the safe and stable operation of whole power plant.
At present, conventional PID algorithm is often used in dosing control systems of thermal power unit. When the thermal power unit is running stably, conventional PID algorithm basically meets control requirements. But when water flow rate changes sharply due to the shift peak load regulation of power unit, there are the characteristics of large time-delay, large load variation and large disturbance for controlled objects, traditional PID control cannot achieve satisfactory control [1, 2, 3, 4, 5, 6, 7, 12]. To achieve a finer control result, many advanced PID control algorithms have been proposed. Due to the strong nonlinear fitting ability of RBF neural network, it can map any complex nonlinear relation. Combining RBF neural network with PID, PID parameter tuning is able to achieve by online identifying controlled object, and a stable controller with self-adjusting ability can be constructed [4, 5, 14]. Smith predictive compensation control is an effective control method to overcome pure delay [11, 17]. In recent years, some improved control strategies have been studied and applied in different dosing control systems [9, 10, 13].
Considering the characteristics of nonlinear, large time delay, and large load of the dosing control system in power plant, based on improved Smith predictive compensation and multi-model switching, a neural network PID control is proposed in this paper. This control algorithm can effectively utilize more than one Smith predictors for better control of large time delay systems, it also uses strong nonlinear mapping ability and online learning ability of RBF neural network, and overcomes the shortcomings of conventional PID control. Through using multi-model control theory, the highly nonlinear dosing system of power plant can be transformed into several linearized sub-models according to the load range, which overcomes the difficult problem of large load variation and disturbance. Finally, to improve the efficiency of parameter debugging and enhance the control effect, genetic algorithm is adopted to automatically optimize the parameters.
Model creation and parameters identification
The most important and representative system of automatic dosing control system in power plants is the adding ammonia to feed-water system. The ammonia addition system of the power plant takes the pH value of the economizer inlet water as the sample value to be input into the controller, which is compared with the setting pH value. The control signal after control algorithm operation is sent to the frequency converter, which controls the driving force of the ammonia injecting pump according to control signal and adjusts the pH value of the feed water. The unique characteristics of pH control are the non-linearity of load and self-measurement. The non-linearity of load lies in the non-linearity of acid-base neutralization reaction. The non-linearity of self-measurement comes from the definition of pH. When the mechanism modelling is conducted from the chemical reaction, the acid-base neutralization reaction can be abstracted as a continuous stirred tank reactor, in which acid and base flow into the reactor from different pipelines. The ammonia addition system of the power plant can be simplified to one continuous stirred tank reactor system. Based on the adding ammonia to feed-water system, an analytical model is built in this paper.
When the efficiency of ammonia injecting pump is constant, the ratio of pump flow equals to the ratio of frequency of frequency converter. To obtain the data more intuitively, succinctly, the output of the frequency inverter is set as an input for control system and the field measured pH value of the feed water is set as an output of the control system. Based on the operation log of a 300 MW boiler in one domestic power plant, the actual operation record data of 300 MW power plant are extracted. When the system runs stably, the output frequency and the pH value are almost fixed. When changing the frequency of frequency converter manually, the field measurement changes of pH value are investigated and recorded, these results show that the pH value begins to change after 180 s, so the lag time of the dosing control system in the power plant is selected to 180 s in this paper.
Model parameter identification is carried out in MATLAB system identification toolbox. This system identification toolbox does not need to do any analysis of the controlled system, and only needs the output response under the artificial input environment of the system or the input and output data in the normal operation of the system, which makes the modeling method of a complex system becomes simple and easy. The order number of the model is estimated by Statespace model in MATLAB, the set range of order number is [1:6]. After many simulations and fittings, the recommended order number of ammonia feeding system in power plant is 2. The identified function model can be written as follows,
Considering the actual working condition of thermal power plant, the real time load will fluctuate with time, even if the load is set to be fixed. If one single-parameter model is used, when the load changes too much, this will cause a larger error. To ensure the accuracy of the dosing control system in power plant, according to the load change range, a multi-model switching control strategy is adopted in this paper. That is, the parameters of the function model are not single, and are identified respectively, according to a certain load interval. Here taking 50% to 80% of the rated load of a 300 MW unit as the load range, the width of each load interval is 30 MW. At each load range, 50 sets of operation data are extracted from the operation log of a 300 MW boiler, as the input for MATLAB system identification toolbox. Using MATLAB system identification toolbox, three model parameters are identified respectively, according to the three load ranges of 150 MW–180 MW, 180 MW–210 MW, 210 MW–240 MW. At the same time, the fitting rates of the models are also calculated automatically. The parameters of each load range are shown in Table 1.
The identified model parameters
According to the identified model parameters in Table 1, three second-order transfer functions with 180 s time delay can be obtained as Eq. (2),
When the dosing system of power plant load varies from 150 MW to 240 MW, based on Eq. (2), the multi-model switching control strategy can effectively control the dosing system.
In feed water process, the dosing system adjusts the dosage and dosing speed according to water sample information in real time. The controller is requested to respond quickly to the dosage adjustment, and avoid overshoot. When the load changes, the controller should ensure the dosage keeps at the setting value. Because the ratio of pump flow equals to the ratio of frequency of frequency converter during the dosing process, and there are also large lag and nonlinearity, traditional PID control has poor dynamic performance and large overshoot. Using RBF neural network to adjust PID parameters online, a self-adjusting controller can be constructed. A Smith predictor can be used in parallel with a PID controller to form a lag compensation link [7, 16], which can the delayed control be fed back to the controller in advance to improve the response speed and stability. So, RBF neural network and Smith predictive control algorithm are integrated to obtain a good control of the dosing system in power plant. The controller structure is shown in Fig. 1, which not only overcomes the shortcomings of traditional PID algorithm for nonlinear systems with low accuracy and poor robustness, but also reduces the sensitivity of Smith control algorithm to model errors [1, 3].
Block diagram of PID control for dosing system with RBF neural network and Smith predictor.
The operation load is not fixed in power plant. With national economy rapid development, the capacity of electricity net and load has increased year by year, as well as the gap between the peak value and the valley value, which making the problem of the peak regulating for power grid is growing. Considering the actual operating conditions of thermal power plant, to ensure the control accuracy of the dosing system, according Eq. (2) at different loads, a control strategy of multi-model switching is adopted [8, 15]. Based on the PID controller with Smith pre-compensated RBF neural network (Smith-RBF-PID), the responses of the controller in Fig. 1 are simulated at the load of 150 MW
To get close to actual operation condition of power plant, in the initial stage of simulation, the function model of 150 MW
Response curve of different controls: (a) PID, (b) RBF-PID, (c) Smith-RBF-PID.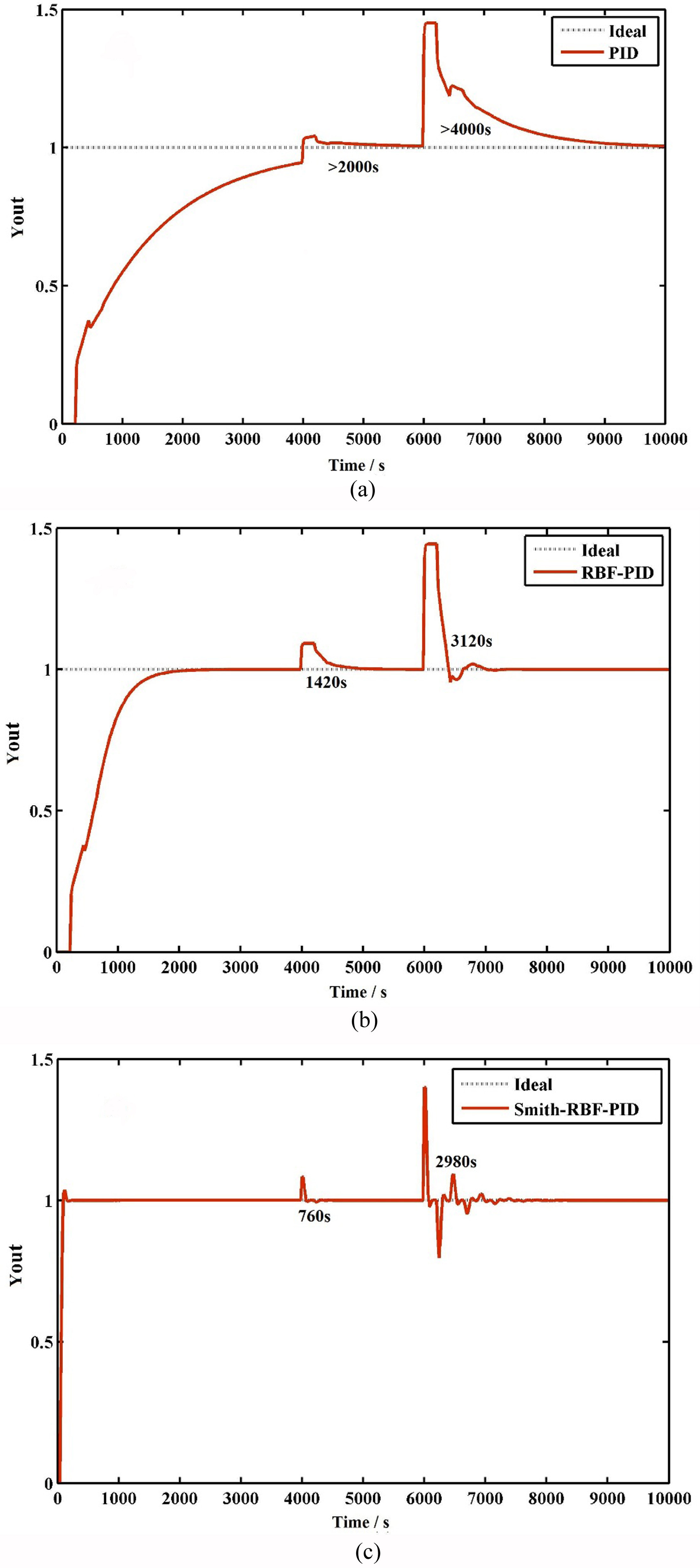
From Fig. 2, it can be seen that the response time is the longest with pure PID control, and it still doesn’t reach the stable value at 4000 s. There is a large overshoot after the model switching, and the overshoot transition time is also the longest, the transition time is more than 2000 s at the first model switching, and the transition time is more than 4000 s at the second model switching, just as given in Fig. 2a. When RBF neural network is used for PID control, as shown in Fig. 2b, the initial response time is about 2000 s, the transition time is 1420 s after the first model switching, and the transition time is 3120 s after the second model switching. Compared with the pure PID control, the control accuracy is clearly improved. When a Smith predictor is used to pre-compensate the RBF neural network PID controller, it is obvious that the initial response is extremely rapid, about 400 s, as in Fig. 2c. And the transition time after the first model switching is greatly reduced to 760 s. The transition time after the second model switching is also reduced to 2980 s, and the control effect is obviously enhanced. However, the Smith predictor introduces an overshoot phenomenon in the initial response, and the response curve wavily fluctuates, especially after second model switching. After a number of fluctuations, it becomes stable.
Although RBF neural network PID controller with a Smith predictor can achieve better control effect, but there is a small overshoot in initial response, especially after second model switching, there is still a large range and long time fluctuations. Considering that the Smith predictive controller has higher control performance for pure delay link, but it requires higher mathematical model accuracy of the controlled system. When the operating loads change, the mathematical model of the controlled system is switched accordingly, one Smith predictor is designed as Fig. 1, the same Smith pre-compensation model is used before and after model switching, which leads to a certain model mismatch, affecting the effects of control.
To solve this problem, an improved Smith pre-compensation RBF neural network PID controller for multi-model switching is proposed, two parallel Smith predictors are added to the Smith pre-compensation part, just as shown in Fig. 3. Three Smith predictors can match three mathematical models of the control system in Eq. (2), respectively. That is, when the object mathematical model changes due to load adjustment, the control system automatically switches to the matching Smith predictor to avoid the mismatch between model and compensation caused by model switching.
Improved Smith pre-compensated neural network PID control structure diagram.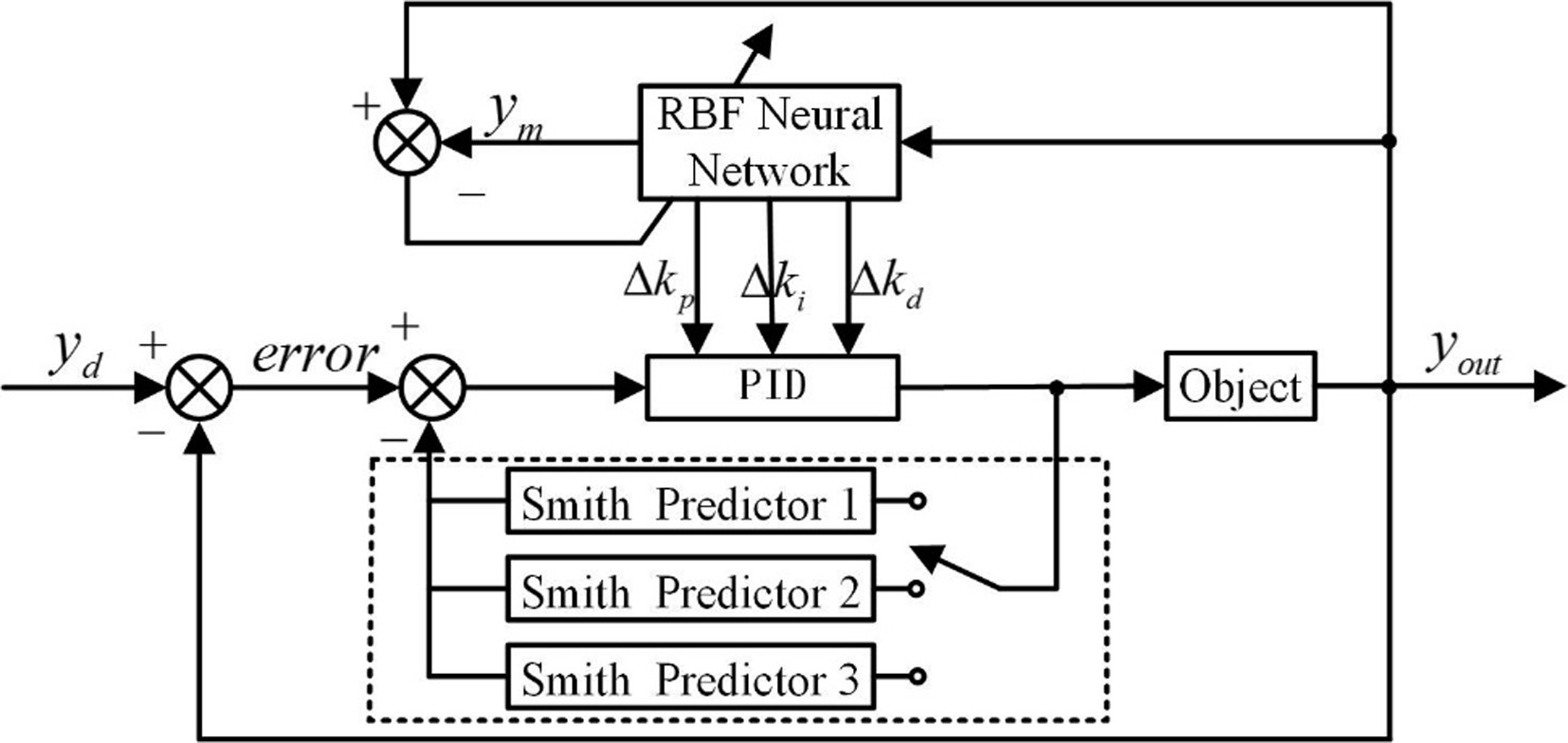
Based on the improved Smith pre-compensated neural network PID controller (Improved Smith-RBF-PID), the simulated result is given in Fig. 4. For comparison, the simulation parameters remain unchanged. Compared with Fig. 2c, it is obvious that adopting improved three Smith predictors can greatly reduce the fluctuations caused by model switching. The transition time after first model switching is reduced from 760 s of Fig. 2c to 400 s, and it decreases nearly by 50%. After second model switching, the transition time also decreases from 2980 s of Fig. 2c to 660 s, the adjustment speed increased by more than 4 times, and the maximum amplitude of overshoot also decreases from 1.458 to 1.288. These results show the improved Smith-RBF-PID controller can not only reduce the transition time of model switching, but also restrain the oscillation after model switching, the system response is more rapid. All these mean the improved Smith-RBF-PID algorithm for multi-model switching has greatly improved the control accuracy. However, the overshoot phenomenon at the initial response still exists, and small fluctuations after model switching decrease, but do not disappear.
Response curve based on improved Smith-RBF-PID control.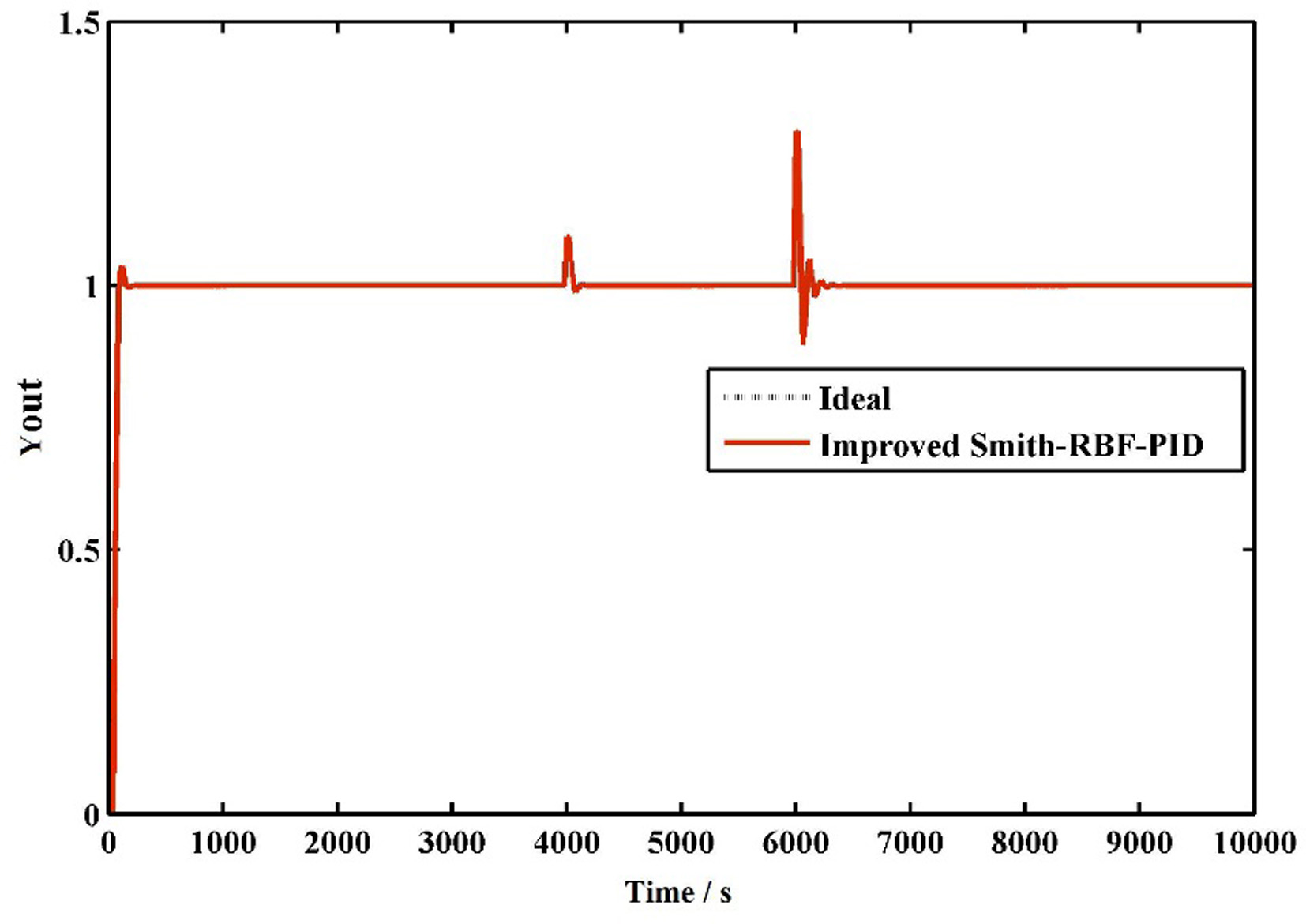
To solve the overshoot introduced at the initial response, and completely restrain the fluctuations after model switching, Genetic algorithm (GA) is adopted to optimize the controller parameters in Fig. 3. Genetic algorithm was proposed by Professor Holland of Michigan University in 1962, which is a parallel stochastic search optimization method which simulates the evolutionary theory and genetic mechanism of nature. To improve accuracy and efficiency, eight important parameters in the iterative process of RBF neural network PID algorithm are selected as the eight genes of chromosome. It is
where,
In GA optimization simulation, classical GA is used, and the bit number is 20, the population size is set to 40, the initial value range of the variable is [0; 1], the elite count is set to 2, and the Crossover fraction is 0.8. Gaussian function is selected as Mutation function, and Stall generation is set to 100. After 100 iterations, the results of GA optimization are shown in Table 2. Based on the optimized parameters of genetic algorithm, the improved Smith pre-compensation RBF neural network PID controller is simulated, the simulation results (GA-Imp. Smith-RBF-PID) are shown in Fig. 5.
Optimization results of GA
From Fig. 5, it can be seen that the overshoot at initial response is completely eliminated and the fluctuations after two model switching are effectively suppressed after GA optimization. To compare more directly the control effects, the specific data of responses after model switching before and after GA optimization are given in Table 3. From Table 3, with GA optimization the response maximum is 1.092 and 1.286 after two model switching, which is nearly same to that before GA optimization. But, it is obvious that after GA optimization the response minimum after two model switching keep at the constant 1.0, which is different with that before GA optimization. This phenomenon means GA optimization has completely eliminated the downward fluctuations. Especially, the multiple oscillations after second model switching in Fig. 4 are completely restrained, and the transition time of second model switching is reduced from 660 s to 380 s, the response speed is much faster and the response is more stable. Therefore, the improved Smith predictive compensation neural network PID controller based on GA has faster response rate and better robustness.
Response curve based on GA- Imp. Smith-RBF-PID control.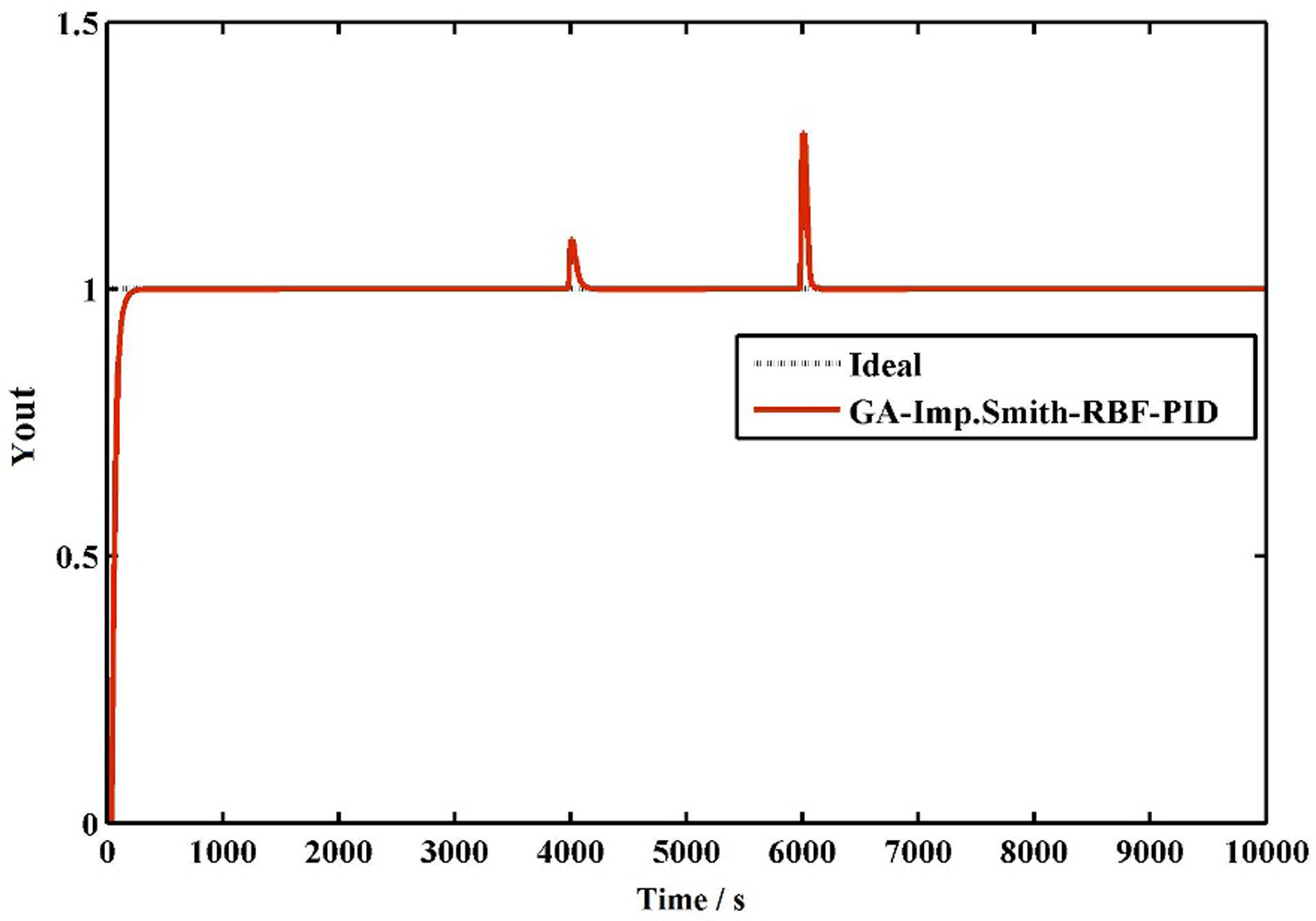
Comparison of the response before and after GA optimization
As the traditional PID control method cannot achieve satisfactory results in the process of power plant dosing control, a RBF neural network PID control algorithm based on improved Smith predictor and multi-model switching is proposed in this paper. According to the load variation of the dosing systems in power plant, the multi-model control theory is adopted, the highly nonlinear dosing system are transformed into several sub-models according to the load range. Several Smith predictors are used to match different sub-models, which effectively overcome the problems of nonlinear, large time-delay and large load variation. At the same time, to obtain optimal control effects, genetic algorithm is used to optimize the parameters automatically, and the response speed, precision and stability of the system are further improved.
Footnotes
Acknowledgments
This research has been supported by Foundation of Educational Commission of Henan Province (Grant: 19 A510001, 18B510007), and Henan Provincial Programs for Science and Technology Development of China (Grant: 182102210295, 172102210064).