
Abstract
Term ‘Morphing’ is generally used where the body structurally adapts to make itself best suited for its situation and become more efficient for the same. This phenomenon is seen in nature where species change their body configuration to handle the situation in the best way possible. The same concept is applied on aircraft to make them versatile for various situations, like changing from a long endurance mission to a high speed combat mission. As of now conventional aircraft are best suited for a few mission types, morphing technology seeks to change that. In the current situation morphing is mostly being done on wings and can be categorized in two broad methods. This review discusses and analyzes those methods. Also a comparison is done among them on the basis of structural stability, ease of manufacturing, actuation efficiency and reliability. Finally a summary is given for the current situation of the morphing wing technology and various future scopes for the same.
Introduction
The fact that modern aircraft are used for few mission types has been seen as constraint in the aerospace industry and research community. This has become a reason for morphing wing technology to be a highly researched topic in the past few decades, resulting in creation of various concepts which have been experimented on. It has been seen that aircraft that have long wing span, lead to a better endurance and aerodynamic performance which is generally used for long range, reconnaissance aircraft and gliders. The drawback in this is, there is a loss in maneuverability and the aircraft cannot fly at high speeds. On the contrary aircraft with short wingspan and high sweep angle have been seen to have high speed and high maneuverability but have a bad aerodynamic performance as compared to long span aircraft. This leads to the problem statement of how an aircraft can be designed whose wings can morph according to the mission and provide the appropriate aerodynamic performance. It has also been seen that a smooth transition in control surface creates less drag as compared to a sudden change, which is seen in conventional control surfaces.
The initial research on the modern morphing wing technology was done in MIT (Massachusetts in 1989 using piezoelectric materials for control of trailing edge flap in rotor blades [1, 2]. But one of the noticeable developments was made by Lockheed Martin, under DARPA’s (Defense Advanced Research Projects Agency) Morphing Aircraft Structure project. The said aircraft was named Agile Hunter. This aircraft demonstrated a three stage morphing which changed the aircraft’s planform dramatically, this gave it the benefit of both long range endurance aircraft and a short wing span high speed aircraft [3].
Recently morphing wing technology has also been used as control surfaces of aircraft and has also been experimented on wing tips for Gust load alleviation [6, 31].
Morphing wing technology can be categorized broadly in two types, airfoil level morphing and wing level morphing [4]. There is actually a significant difference between the two. Airfoil level morphing includes leading edge, trailing edge and camber morphing which is mostly focused towards a better aerodynamic performance by providing a smoother flow through the wing, whereas wing level morphing includes span morphing, twist morphing, sweep change and folding wing. Sweep morphing has been used abundantly in modern fighter aircraft to improve speed and maneuverability of the aircraft, and folding wing can be seen on various military and civil aircrafts in places such as aircraft carriers or airports where space is a constraint. But in comparison with sweep morphing the concept of span morphing and twist morphing technologies are still on developmental and experimental stages. Folding or flapping wing concept is only being used on MAVs (Miniature Ariel Vehicles). The biggest challenge in the wing level morphing technology is the weight of the aircraft after implementation of the concept and also selection of appropriate skin for morphing.
Earlier versions of morphing wings were mostly dependent on mechanical components, this had a significant drawback of the extra weight it added to the aircraft, also mechanical structures are more complex and would have been difficult to maintain in the long run. But a more modern approach to wing morphing takes help of compliant structurures, modular structures, smart materials and smart actuators.
This paper will discuss various morphing technologies that have been tested on aircraft and will draw a relative comparison between them. Also various technological aspects such a structure, aerodynamics, types of actuators and materials used have also been discussed. Finally a conclusion will be drawn regarding the current situation of the wing morphing technology in general.
Airfoil level morphing
Airfoil morphing has been subdivided into leading edge morphing, trailing edge morphing and thickness morphing. The leading edge and trailing edge morphing tend to change the either the leading or trailing 20% of the airfoil. Currently compliant structures are being implemented for this category of morphing. This has been used in place of mechanical systems like finger structures [30] and sliding skin concepts. Smart actuators (Shape Memory Alloys, Piezoelectric composites, Electro active polymers etc.) [1, 11] and lightweight materials can also be used as mechanical actuators keeping the overall weight in consideration, although they have a low actuation power output and require a comparatively larger power intake for a reasonable amount of actuation. The durability of smart materials and actuators is also a point of concern. For leading edge morphing mechanical concepts involving kinematics and motor actuators along with elastomeric skin is more popular [7, 8, 9]. The European research program on Smart Intelligent Aircraft Structures (SARITSU) has actually helped researches to come up with innovative ideas for morphing wing technology, not only in defense aircraft but also in commercial ones. One such concept was the Adaptive Trailing Edge Device or the ATED concept. This research on ATED saw the designing, manufacturing, assembly and testing of trailing edge morphing device based on multi joint rib. The conclusion of the research was that it is economically possible to implement such morphing concepts in commercial aircrafts [32]. Even though, the use of finger type morphing wing seems to be out of use, due to the heavy weight penalty it introduces, a recent experiment done on double rib sheet structure to create a four part rib. This idea was implemented on traditional fixed wing Talon UAV aircraft and has shown to increase the flight efficiency of the UAV by 14.1%. A similar experiment done on a total variable camber aircraft has shown to increase the flight efficiency by 16.3% [35, 36].
One of the more recent method for camber morphing has been seen using the fish bone concept named as the Fishbone active camber (FishBAC) [12], this concept had shown to give better aerodynamic results as compared to its conventional flapped counterpart. Here the airfoil used was NACA 0012 whose internal ribs were replaced with a compliant fishbone like structure and were actuated using tendon like structures and a driving shaft. Later on an aerodynamic analysis was done for the same showing and increment in Cl/Cd (Aerodynamic lift to drag coefficient) values. A concept similar to the FishBAC was tested in Spain under the name of CURVED project, this provided a substantial research input in the field of bio-inspired shape changing mechanism. The various solutions investigated in the CURVED project brought forth the “double-C” outline which permitted directional morphing. These were made of series of c shaped stringers which provided a spring like mechanism [32].
Other than the fish bone concept compliant structures have also been specifically used for leading and trailing edge, often showing impressive range of morphing [13]. Corrugated structures have also been taken into application for trailing edge morphing [14]. It can be concluded that in general the concept of camber morphing is more inclined towards compliant and flexible structures which use elastomeric skin.
Camber morphing does not necessarily need to be as dynamic as the FishBAC concept or the double rib sheet concept. The aerodynamics of the wing can be subtly changed by changing the thickness of the airfoil. This can be done by introducing actuators on the upper face of the wing and using flexible skin for the purpose. The research done on this concept has shown to extend the laminar region the airfoil by 3.71% of the chord. This extension helps in improving the aerodynamics of the wing by delaying wake drag [34].
Wing level morphing
Wing level morphing has shown a great level of versatility and effectiveness in recent researches. It has been seen that wing level morphing not only improves the aerodynamic performance of the aircraft but also provides an excellent roll control to the aircraft [15]. Although it should be noted that the roll control, while being highly sensitive, depends on the angle of attack and actuation speeds, also to provide a sufficient roll control the span extension should be of at least 22% on either side.
Wing level morphing can be broadly classified into span morphing, twist morphing and flapping wings. Span morphing has been one of the easier method of wing level morphing due to easily available options of linear actuators and compliant skins. Pneumatic actuators have been used in earlier concepts of span morphing [17], but the major drawback in using pneumatic systems and other conventional systems is the weight of the actuation system itself. In recent works, there have been an increasing use of compliant and smart materials. One of them is the compliant spar morphing which uses two aluminum tubes as spars connected by polyurethane elastomers [15]. Other than compliant structures electromechanical structures have also been used in zig zag wing box where the internal structure of the wing consist of links in zig zag shape (Fig. 1) [18].
Zig Zag wing box concept.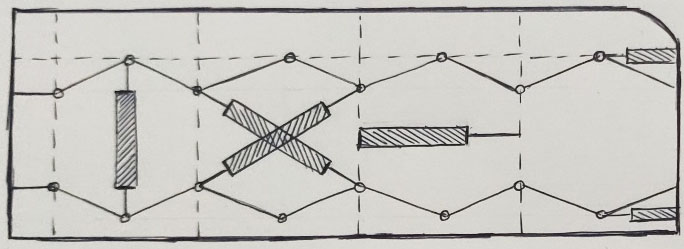
It is also to be noted that, wing level morphing need not be completely smooth for the wings, an innovative idea was presented in a research which involved discontinuous surface for wing level morphing. The method involved breaking down of the wing into multiple sections span wise. Each section is articulated on its own and hence it creates the desired wing shape. Although the numerical computation done for this method was limited to around
A Suitable replacement for pneumatic type linear morphing is the GNATSpar (Gear Driven Autonomous Twin Spar) [19] which uses rack and pinion type actuation which also uses the wing’s internal volume effectively and hence is lighter as compared to older telescopic wings. This particular concept has the potential for 100% span extension but has presently been tested at 20% extension. One of the major drawback of this concept is the moment created at the base of the wings.
Span and twist morphing concept is not only limited to the complete span of the aircraft, but can be used in a small section of the aircraft. For example it has been used at around 50% of the outer wingspan of a concept design, using soft composites and SMA (Shape Memory Alloy) wires for actuators. This concept showed a small increment in the aerodynamic lifting coefficient at smaller angles of attack [20]. Partial wing twist morphing is also observed to have a better roll control as compared to conventional control surfaces, giving 1.6 times higher roll rates and added weight benefits [21]. A partial twist morphing also allows the rest of the wing to be used for other purposes such as installation of solar panels or adding other payloads. Wing tip morphing can also be seen as a form of span morphing, this has been implemented using corrugated structure coupled with a motor system [22]. This form of morphing can also be used in application of flutter mitigation, it was observed that flutter only occurred at a certain critical span length, and hence to stop or reduce the fluttering, axial morphing was used. This concept of flutter mitigation was verified by Floquet theory and the equation of motion were established by piston theory and Kane theory [33].
So far, all of the concepts seem to be similar on many levels, but recently a new concept has evolved which uses a new approach to wing level morphing. In this the wing is made of lattice based cellular structures [5] which behaves as a single structure and share the load throughout the wing span. The elastic characteristics to the wing is provided by the unique modular structure, which also provides a high performance aerodynamics. Using lattice based structure an anisotropic inner skeleton can be created for the wings. The model created was tested in a wind tunnel at NASA Langley Research Centre, Which showed that twist morphing can perform same as a similar conventional wing model and can also provide stall mitigation.
One of the interesting concepts in the morphing wing technology is the one which has been directly influenced by bird and bats. While the mechanism and aerodynamics of the two is different, they have been researched on and replicated using novel materials and smart actuators. The bird wing concept is based on the folding wing concept, this is a biomimicry of birds which use outer feather like structures to change the wing span and hence are able to change the lift and drag, this concept cannot be used on larger UAVs for now, but has been implemented on MAVs (Miniature Ariel Vehicles). The roll control was also handled using the wing span by different lift forces [10].
The bat design consisted of a skeleton like structure similar to those of lesser fruit bats. The actuation here was done in two places, one at the wing base, which was used for flapping and the other at the wing hinges, which was used for active morphing. The complete system was mechanically handled by a single motor supported by various linkages [27].
The skin selection for morphing wing technology is an important and vast field of research on its own. The requirements for morphing skin in theory contradicts itself. While the skin should have low in plane strain so that it can morph without application of high power, at the same time should show good out-of-plane stiffness so that it can take the aerodynamic loads. Hence, this calls for an anisotropic behavior.
Many times, due to unavoidable condition of the design and aerodynamic constraints, the skin is made in such a way that it does not beat any major loads and majority of the load gets transferred to the inner members.
One of the popular skins used for morphing are unidirectional composite structure which show a good anisotropic behavior due to the arrangement of the fibers and the matrix in the structure [23]. For different purposes the composite can be aligned to the wing accordingly and hence show a good anisotropic behavior. These composite structures are called as Flexible Matrix Composites (FMC).
Situational use of composite skin.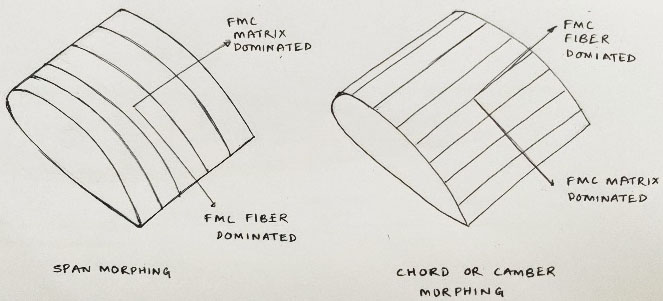
Another popular skin structure used in morphing aircraft is the honeycomb sandwich panel. The honeycomb structure is known to show a great anisotropic behavior. This behavior has been studied on for its longitudinal elasticity and transversal stress bearing capacity.
The honeycomb structure used by most researchers was a patented design called as MorphCore [24]. The structure is based on the concept of zero Poisson’s ratio and provides an excellent skin for aerospace purposes. The honeycomb structure is not used alone, it is used as a sandwich panel with two composite layers sandwiching the honeycomb panel. To further increase the transverse loading capacity carbon fiber tubes can be inserted in the honeycomb wing structure axially [26].
One of the strongest and oldest contenders for morphing skin is the corrugated skin structure. Corrugated structures are similar to composite panels as they show a highly anisotropic behavior, making it suitable for morphing purposes. Corrugated structures have been used for wing tip and trailing edge. These structures can be made of various materials such as Kevlar, carbon fiber composites, fiberglass composite etc [25, 22]. Many times the corrugated structure in itself is not enough to handle the transversal loads and hence might require an additional reinforcement for stiffening the internal ridges or introduction of a rod in ridges or covering one side with an elastomer to improve the transversal load bearing capacity [25].
Corrugated reinforced structure.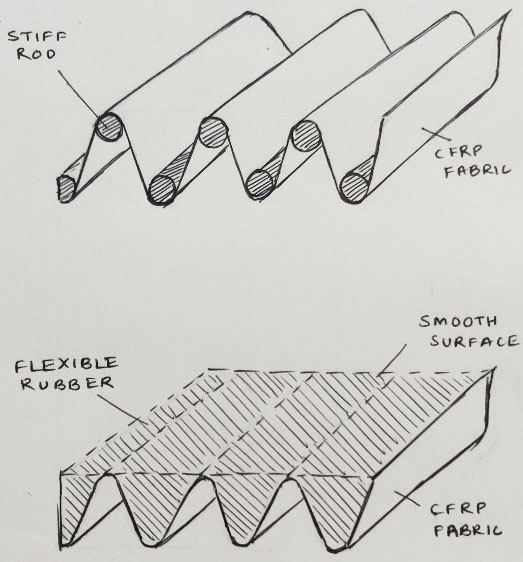
Usually a set of metrics are taken into consideration while selecting an appropriate skin for morphing structures but owing to the complexity of the mechanism, this method fails and this is where we test individual material according to the required conditions [22].
The actuator required for the purpose of morphing wings should be lightweight, accurate and should have a certain level of load bearing strength. In earlier experimentation and concepts, conventional mechanical actuators like hydraulic and pneumatic systems were considered but these posed a major threat of added weight to the system. Other than this as the actuation range and extension range increases, many other factors such as inertial forces, moment forces, actuation power required etc. start to come into picture.
In one of the research [19], rack and pinion mechanism has been seen to be used. This system can be called as an electro-mechanical system due to a heavy dependence on sensors and motors in it, the advantage of this system is that it is self-locking and hence does not require extra energy to keep the morphed structure in place. In the FishBAC system a spool and tendon system is used, which required a relatively low energy input and the actuation results were impressive as it improved the aerodynamic characteristics of the airfoil [12]. Also the further use of flexible compliant structure is an added advantage in the FishBAC structure. One of the research used rubber muscle actuators which decreased in axial length and increased in cross section on being filled with pressurized gas [28].
While smart actuators such as PAM (Pneumatic Muscle Actuators) and Shape memory alloys [26, 1] are being considered for the purpose of actuation, most of the actuators used in various morphing systems have been based on mechanical kinematics and use of simple structures such as links and cams. It can be concluded while smart actuators are widely being used and experimented on, the use of conventional lightweight kinematic based mechanical systems is still dominant. Within the actuation mechanism, various sensors were used to measure the degree of actuation or the pressure or lift distribution in the morphing wing. But one of the methods involved Bragg wavelength shift using Fiber Bragg Grating sensor to sense the 3D shape of morphing wing. The error from this method as compared to 3D digital photogrammetry system was less than 5% [42].
Aerodynamic involving morphing wing
In most of the cases, we got to see that the morphing technology seems to do as good as the fixed wing technology. In a few cases it does better due to the absence of discontinuous body and breaks that usually occur in fixed wing aircraft with their conventional control surfaces. Major reason for better performance in morphing wing is primarily due to smooth wing shape and smooth actuation junction. In one of the research, which used 3-D, multi fidelity aerodynamic models for drag calculation, found that a smooth airfoil morphing wing had 10% less drag as compared to its conventional counterpart [38].
Tests performed on long range cruise missiles have showed a decrease in drag by 25% and an increase in range by 30% [18] and experiments using corrugated skin has also shown promising results with almost no drawback if used in suitable conditions [29]. The results held strongly for most of the cases at lower angles of attack, where they were seen to perform better than their conventional counterparts. Also the aerodynamic performance was seen to improve majorly due to wing tip morphing [20].
Span morphing has seen to improve the endurance of aircraft by 5.5%, but the minimum span extension which causes such a morphing should be equal to or greater than 20% [18]. A research on unsteady aerodynamics of morphing wing proved that the lift coefficient and the lift to drag ratio is significantly higher in morphing wings just before stalling angle or near higher angles of attack. This conclusion on unsteady aerodynamics can be useful in handling control performance and overall aerodynamics of the morphing wing aircraft [40]. Other than better aerodynamic performance, morphing wing types such as twist morphing has seen to give good roll control [21]. The fish bone concept has been seen to improve the increase of lift to drag ratio and overall lift coefficient [12]. It is also seen that a better aerodynamic performance by morphing wing can lead to a significantly less amount of fuel consumption [37, 41].
Conclusion
Seamless morphing wing is still a technology which is being tested and being experimented on. From advanced actuation systems to novel materials and structures, all can be used to perfect the methodologies used for the morphing concept. There is no doubt that the morphing technology will elevate the aerodynamic characteristics and flight efficiency of future aircrafts to the next level, even though currently being in an experimental stage. Further studies on this topic will be done on the active morphing technology on flexible wings using embedded algorithm and inclusion of genetic algorithms in accurate prediction of aerodynamically efficient wing planform.