
Abstract
A bi-level multi-target programming model is established for optimization of urban arterial road traffic signal coordination control. The performance index function for optimization is defined to reduce traffic delay and vehicle emissions at intersections. As a result, the optimization traffic signal control strategy can guarantee smooth traffic flow and minimum total emission in the road network. The result of simulation verifies the optimization effect of above model based on MATLAB and VISSIM.
Introduction
The intelligent transportation system can effectively solve the problem of modern traffic congestion. The urban traffic signal control is the important research content in the field of traffic engineering and control [1]. In recent years, traffic signal control has presented three major trends: systematization, network and intelligence. The research on it has made great progress as well. Yan et al. [2] applied iterative learning control (ILC) theory to address the urban traffic signal control problem in a macroscopic level traffic environment, which can keep the traffic flow in the road networks at a reasonable level. Fu [3] designed a kind of intelligent traffic light to automatically adjust the signal cycle length and green ratio according to the vehicle flow rate of intersection. It can improve the traffic efficiency. However, with the expansion of urban areas and road networks, the rapid increase of exhaust emissions along with the increasingly vehicles number, the traffic control system is still lagging behind. Especially in the overall optimization of traffic control and real-time control of large-scale road networks, the existing control methods are obviously insufficient [4].
Meanwhile, from the perspective of environmental protection, the vehicle exhaust emissions as the optimization target will be introduced into traffic signal control, which has significant meaning on energy saving and emission reduction. Wang et al. [5] analyzed the relationship between the signal cycle and capacity, average vehicle delay and vehicle emission. And established the signal cycle optimization model considering the time cost, energy cost and pollution cost. Lv and Zhang [6] investigated the effect of traffic signal coordination on emissions and compares it with their effects on operational performance measures of delay and stops. But in the recent study, the parameters of exhaust emissions are not quantified explicitly and the research method considering exhaust emissions and delay in the intersections at the same time deserves for further study.
In this paper, the research method of bi-level programming model is linked with the timing control of traffic signals considering emission factors. A bi-level optimization model is established for typical urban road networks, and the total delay time of the road network and the total PM
Bi-level programming model of traffic signal coordination control
Bi-level programming is a mathematical model for the two-layer decision problem. It is a system optimization solution with a two-layer hierarchical structure. Different decision-makers control the corresponding decision variables and optimize their respective objective functions. The policy sets are interdependent, that is, the upper decisions will affect the underlying decisions and targets, and vice versa.
A bi-level mathematical programming model can be applied to determine the timing of the traffic signal to maximize the reserve capacity of the road networks. Usually, the upper level of the bi-level programming model used in the transportation system is an optimization problem, including signal light control, traffic signal setting and optimization, toll station setting, speed optimization, etc. The lower level is used to describe the path selection behavior of the drivers, which is an artificial response to the upper level decision. However, in the traffic control system considering environmental factors, the upper level is a multi-target optimization problem, including: optimization for signal timing, ramp control and optimal speed with maximum environmental capability respectively. The lower level is also a user balance model that describes the path selection behavior of drivers. The bi-level multi-target programming model can be characterized as a Stackelberg game. The leaders here are transportation planning (designing) personnel whose goal is to optimize the performance function of the entire system through traffic planning and traffic control; the followers are transportation networks users who choose optimal path according to the decision of the leaders and their own interests.
In this study, the research method of bi-level programming model is linked with the timing control of traffic signals considering emission factors. From the perspective of the game theory, the leader, here is the traffic administration, aims to minimize the delay time and PM
Upper-level model
In the upper model, the total amount of PM
The upper-level model is listed as below:
Where:
There,
The emission pollution calculation can be broken down to the running emission and the idle emission of each entrance of the intersection [7], Therefore, vehicle emissions in the model has the following form:
There,
According to Transportation Research Board (2000) Highway Capacity Manual [8], in order to calculate the average delay time of vehicles on each lane group, the impacts such as discrete dispersion of traffic flow and signal control of upstream should be taken into consideration. And the average delay of the vehicle under the saturation traffic state also needs to be valued. The expression is as follows:
Where
We utilize VISSIM traffic simulation software to simulate the traffic flow of typical urban road networks in order to obtain the results of outputs under the fixed signal timing scheme. The emissions under this control scheme and the total delay of the road networks are calculated, and they are placed in the denominator as the initial parameters
In the bi-level optimization model, the lower-level model is a user-equilibrium model. It is utilized to describe the user behavior of route choice in the road network. The lower-level model has the following form:
Where,
Where, the delay time
There are two options for intersection signal coordination control: starting offsets coordination and finishing offsets coordination. In this paper, the starting offsets coordination is adopted, that is, based on the preset reference intersection, the green light start time of all intersections in the system is determined by the starting offsets of the upstream or the downstream. The signal phase to be coordinated is set as the straight-going phase between adjacent intersections. From the intersection
Here
In the ideal state of the two-way green wave, the offsets can be concluded as:
Where
In consideration of the complexity of the two-way traffic signal control, the parameters of the main traffic flow on the arterial roads needs to be optimized before those of the secondary traffic. Then Eq. (10) is updated as
Here,
In this paper, a typical urban road network was designed as Fig. 1.
Supposed that: there were 12 links between nodes O and D, and the traffic capacity was 4000. Nodes A, B, and C were intersections controlled by coordinated signals control model, all controlled by two-phase signals. A was the crossing intersection, and B and C were T-shaped intersections. The link length of each section was shown (Table 1).
Length of the links
Length of the links
Average traffic volumes of the links
Framework of the road network.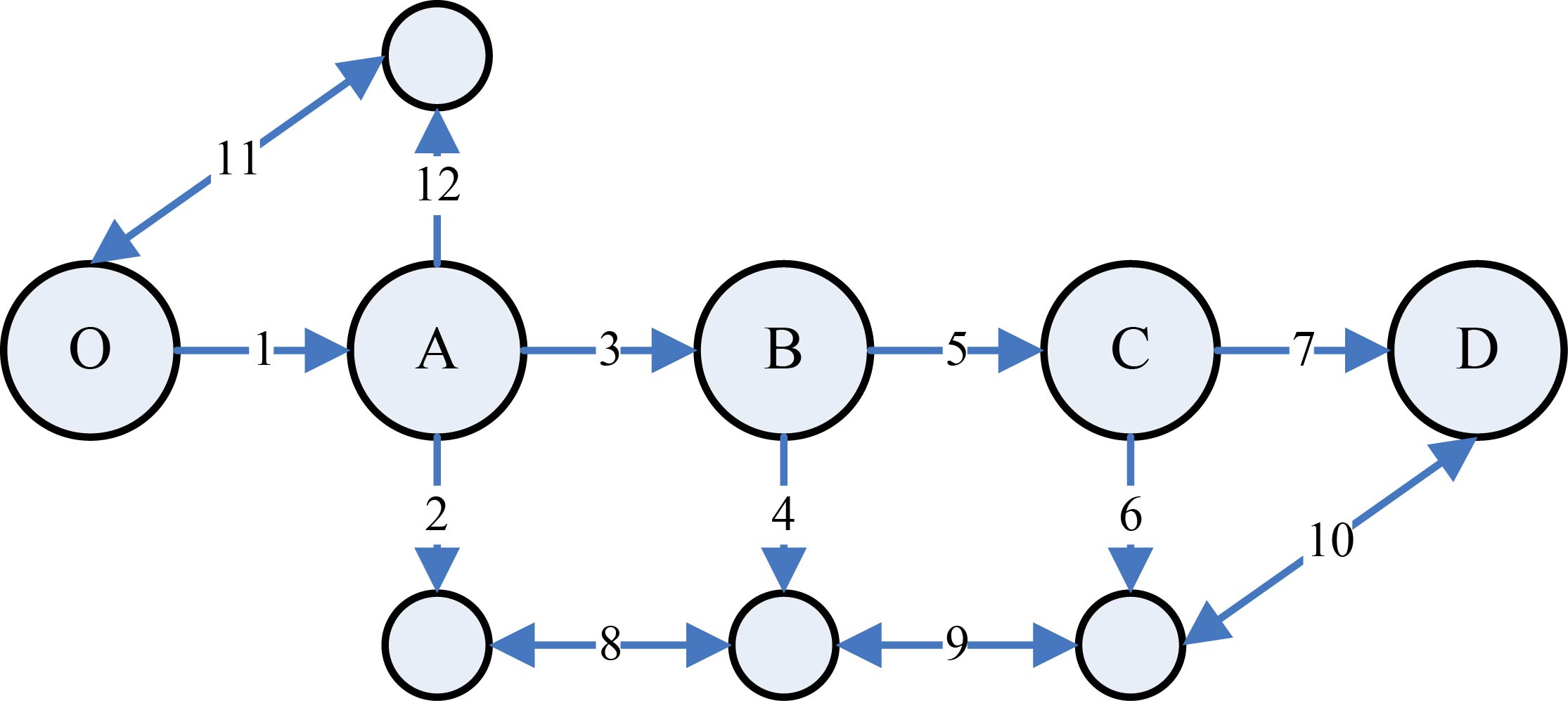
In this case, the parameters of the proposed model were set as follows: set the saturation traffic volume on arterial road and hypo-arterial roads respectively as 1800 pcu/h and 900 pcu/h, the time headway as 2.5 s/pcu, the maximum signal period as 200 s, the minimum signal period and the minimum green time as 20 s.
After importing the background and defining the scale, a typical urban road network simulation map could be drawn according to the road parameters illustrated in Fig. 1. We set the signal control parameters as follows:
The output files of simulation. (a) The segment evaluation file; (b) The delay file.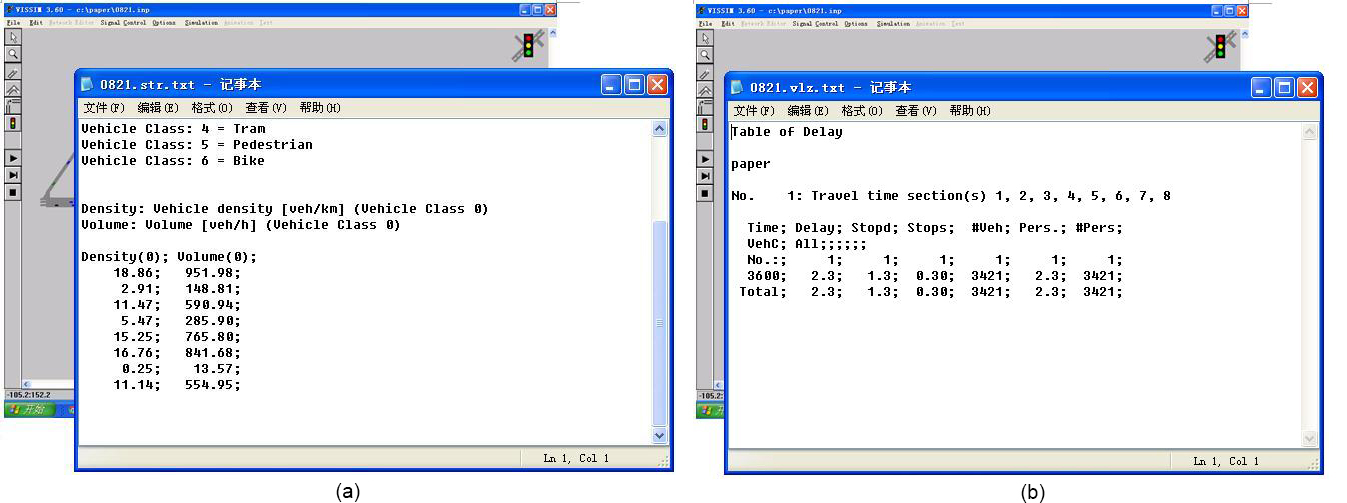
VISSIM provides a variety of evaluation functions and output them in text form. In this study, we concerned about the traffic volume and vehicle delay of each link. So we got the Delay File (*.vlz) and the Segment Evaluation File (*.str) generated after the simulation, as shown in Fig. 2a and b.
According to the Segment Evaluation File, the average traffic volumes of each link are shown (Table 2).
In the Delay File, “Delay” column is the average total delay time; “Stopd” is the average waiting time; “Stops” is number of stops; “#Veh” is classified as traffic volume in the link of delay detection; “Pers” is the per capita average delay time; “#Pers” is the pedestrian volume in the link of delay detection. The average vehicle waiting time in this simulation was
Calculate
Commonly, the solution of bi-level model for traffic problems is very complicated. However, the genetic algorithm has its special superiority to solve such problems in that it requires no mandatory on the differentiability of functions, and it can output the optimal value or the most approximate optimal value [10]. At the same time, the control of the traffic system requires high real-time performance and fast convergence of the algorithm, so too complex algorithm is not suitable [11]. So, the genetic algorithm program was constructed in MATLAB to solve the model in this study. The parameters of the algorithm were set as follows: set population as 100, the crossover rate as 0.95, and the mutation rate as 0.001. After calculations, the result was
A bi-level optimization model is established based on User Equilibrium for improving the signal coordination control of typical urban arterial roads to optimize two targets at same time, the total delay of road networks and the total amount of PM
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China 61573264.