
Abstract
To improve the performance of the battery management system in hybrid electric vehicle (HEV), the core is to estimate the state of charge (SOC) and the state of power capability (SOP) of power battery quickly and accurately on-line. Firstly, in order to improve the SOC estimation accuracy and reduce the estimation error of battery, an improved particle filter algorithm based on particle swarm optimization (PSO) is proposed. Aiming at the uncertainty of system noise in traditional particle filter (PF) algorithm, the PSO algorithm is used to optimize the system noise of PF and to improve the estimation accuracy. Secondly, a method that regards the battery voltage, current and the optimized estimation of SOC as constraints to predict the actual maximum charge-discharge power of the battery is proposed. The simulation results show that the optimized SOC estimation and SOP prediction algorithm has higher accuracy and is applicable to the dynamic estimation of the actual driving cycles of hybrid electric vehicles.
Introduction
At present, with the rapid development of hybrid electric vehicles, power battery as the main energy source of HEVs, its performance is closely related to the accurate real-time estimation of battery state by battery management system (BMS). BMS system shall be able to accurately and quickly estimate SOC of battery in real time, reduce battery damage caused by overcharging or over-discharging, extend battery cycle life and improve battery efficiency [1]. The SOP of battery power state is used to represent the peak power that the battery can assumed. The estimation of SOP can estimate whether the battery can satisfy the power renewal demand when discharging and recover the maximum energy in ensuring the safety of the battery when charging. Therefore, it has important engineering application value to accurately estimate SOC and SOP of battery used in HEVs.
Commonly used methods for estimating SOC of power battery include open-circuit voltage method, internal resistance method, Ampere-hour (Ah) integral method, discharging experiment method, neural network method, fuzzy logic method, support vector machine method, particle filter (PF) method, Kalman filter (KF) and some composite algorithms. Refs [2, 3] adopt open circuit voltage and discharging experiment method respectively to estimate SOC of battery, but these methods are suitable for off-line performance estimation of battery. In ref [4], a SOC estimation method using fixed resistance instead of actual load resistance is proposed, but during the switching is easy to cause power loss. Refs [5, 6], used neural network method to estimate SOC, which can ensure high estimation accuracy, but the training time is long and the estimation accuracy depends on the number and quality of training. Ref [7] proposed the particle swarm optimization (PSO) of extreme learning machine (ELM) neural network method, the accuracy of estimation is improved, but a large number of training samples are still needed. In Refs [8, 9, 10, 11, 12, 13, 14], Kalman filter algorithm is used for SOC estimation and the optimal estimation in the sense of minimum variance with state variables is the ideal SOC estimation value. However, it is difficult to guarantee the noise type in practical application, which results in the unreasonable accuracy and convergence. In order to solve the problem of noise type, Refs [15, 16] introduce the PF that is not limited to Gaussian noise to estimate SOC. In Refs [17, 18, 19], the comparison shows that although the particle filter method obtains high estimation accuracy, the parameters of PF is not considered in the study, which will affect the convergence, stability and accuracy of the estimation results.
In respect of battery power state prediction, the test method adopted by USABC in the United States is to test the battery’s ability to discharge continuously for 30 s under 2/3 open circuit voltage at different discharging depths, but this method acquires static peak power, which cannot be used in actual conditions. The power density test method of JEVS in Japan is to charge and discharge the battery alternately for 10 s with 1C, 2C, 5C and 10C respectively, and record the battery voltage. This method can obtain the maximum charging and discharging current under the cut-off voltage limit, but it does not take into account the discharging capacity of the battery with the high rate working current. According to the battery system test specification formulated by China Society of Automotive Engineers, the peak power of battery is the product of voltage and current at a certain time after each stage of pulse charging or discharging. This method does not represent the output capacity of battery’s continuous peak power. At present, the widely used prediction method of battery peak power is the composite pulse method. In ref [20], based on the internal resistance model of the battery, the instantaneous SOP of the battery is estimated by using the open circuit voltage and internal resistance with the current SOC. Although the complex pulse method is simple in calculation, the actual current changes violently and the limitation of charging and discharging current and SOC are not considered, which is easy to cause large estimation error. Ref [21] proposes a single-step and a long-term prediction method of peak power with the constraints of voltage and current respectively based on an innovative battery model. Ref [22] employs the adaptive unscented Kalman filter (AUKF) to develop a novel model-based joint state estimator for battery state of energy and power capability. In ref [23], an H
In this paper, the first-order Thevenin equivalent circuit model and state-space expression are established for the power battery. The recursive least squares with forgetting factor (FFRLS) method is used to identify the parameters of the battery equivalent circuit model. The PF algorithm is designed with SOC and open circuit voltage as state variables. A PF algorithm based on PSO is proposed to estimate SOC and optimize the process noise and observation noise of PF, so as to realize the adaptive adjustment of filter parameters and improve the robustness of filter algorithm. In order to improve the estimation accuracy of SOP, method that regards the battery voltage, current and the optimized estimation of SOC as constraints is proposed to estimate SOP on-line and predict the continuous peak power output capacity of battery for 30 s. Finally, the proposed SOC and SOP estimation algorithms are verified by simulation experiments.
Battery equivalent circuit model and parameter identification
Battery equivalent circuit model
In this paper, the equivalent circuit model is selected to model the battery. In order to meet the fast calculation demand of frequent charging and discharging of HEVs, the Thevenin equivalent circuit model with first-order RC is selected to estimate the SOC of the battery after comprehensive consideration. The circuit is shown in Fig. 1. In Fig. 1,
Thevenin equivalent circuit diagram of battery.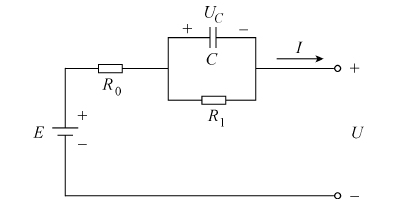
According to KVL and KCL, the circuit model satisfies the following equations:
Considering the influence of battery charging-discharging rate, temperature and cycles on SOC, the estimation equation of SOC based on ampere-hour method is revised as follows:
where,
To facilitate SOC estimation using particle filter algorithm, discretizes the estimation equation and obtains:
According to the battery experimental environment and battery performance, select
In order to estimate accurately the SOC of the battery, it is necessary to identify the parameters of the battery model. The off-line identification method is simple and feasible, but the off-line parameters are difficult to adapt to the changeable environment in the actual working process of batteries and cannot guarantee the accuracy. Therefore, a FFRLS method is used to identify the parameters of battery model dynamically.
According to the performance of the battery, there is a corresponding relationship between the electromotive force (EMF) and the SOC value of the battery. When the battery is in an open circuit state and is stationary for a period of time, the internal balance of the battery can be achieved. Generally, the open circuit voltage value is approximately equal to the EMF of the battery. So in order to identify the parameters of the power battery model, the open circuit voltage and the SOC of the battery need to be established first. The power battery is tested by using the battery test system built by Neware’s power battery test cabinet, so as to obtain the OCV-SOC graphs. The testing system is shown in Fig. 2.
The Laplace transformation of Eq. (1) is carried out and the result is obtained as
Then, the system transfer function with current
Test system of power battery.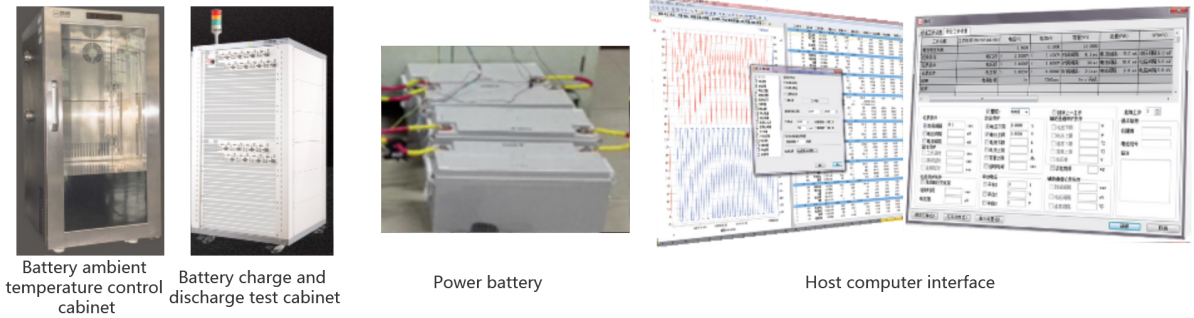
The bilinear discrete transformation is applied to Eq. (5) and the discrete transfer function is obtained by making
Select
Then, Eq. (6) is rewritten as
By transforming Eq. (7) into difference form, the difference equation of system output
Select
Equation (8) is rewritten to the standard mathematical model of least squares identification system, that is
Where,
In Eq. (8),
The least squares estimate is the best estimate in the minimal sense of the residual quadratic criterion function, so, take the extreme value of Eq. (10) and make it equal to zero, then
When
The RLS can be obtained by recursion of the process. Because the RLS method has infinite memory length, for battery parameter identification, the accumulation of old data in the process of recursive operation will make the recursive results difficult to reflect the characteristics of new data. To avoid the problem, the forgetting factor
In the general recurrence process,
When the terminal voltage, current and SOC are known, the optimal value of
PF is a kind of approximate Bayesian filter algorithm based on Monte Carlo simulation, which estimates the parameters by calculating the mean value of the particle sets, so as to realize the minimum variance estimation of the state values. Compared with Kalman filter, PF does not need to determine the noise model of the system and is not limited by the noise model. It can effectively process the nonlinear system and has higher estimation accuracy [24].
The general discrete state space expression of the system is as follows:
Combining Eqs (1) and (3), PF algorithm is used to estimate SOC. Taking
Where,
Initialization. The system state estimation described in Eqs (16) and (17) can be used in the following two steps.
Equation (18) is the prediction equation and Eq. (19) is the renewal equation. This kind of processing seems simple, but it is usually unable to determine the analytical form of posterior distribution. In order to approximate the posterior distribution, Monte Carlo method uses a large number of weighted particles to represent the posterior distribution. The text extracts Sampling of particle sets. Calculate the Significant weight of each particle in the particle sets. The equation for calculating the weight of each particle in PF is as follow:
In the PF algorithm, the Gauss function is introduced to approximate the significant function, which ensures that the significant distribution of PF is closer to the posterior probability distribution. It avoids the significant degradation problem in the filtering process and guarantees the convergence of the significant distribution. Therefore, the equation for calculating the weight of each particle in PF is as follows:
Where, Using Eq. (22) to normalize the calculated particle weights
Now, the statue updates to
Resampling of particle sets. Particle filter algorithm realizes the selection of survival of the fittest by resampling. This paper chooses random resampling algorithm to realize resampling of particle sets. Random resampling is based on the idea of hierarchical statistics. The weight of particles with high weight is reflected in the number of index after resampling, that is, the number of index of particles with high weight is more and the number of index of particles with small weight is less, so that the particles with high weight are copied, the particles with low weight are eliminated and the degradation is refrained. The detailed realization is: A random array Update states and output. According to the resampling results in step (4), the particles in the original particle sets are selected on the basis of the index obtained. The selected particle sets is the filtered particle sets. The mean value of the sets is calculated to obtain the filtered state variables, that is, the final state of the PF estimation. Save the updated state and output it. The algorithm ends.
Basic PSO algorithm
The idea of PSO algorithm is derived from the research and behaviour simulation of the simplified bird swarm model. When solving, the individual in the model is abstracted as “particle” without mass and volume. Particle swarm follows the optimal particle in the solution space to search without the crossover and mutation operation of genetic algorithm. It can realize the process of finding the optimal solution in the complex space [25].
In the search space of n-dimensional particle swarm optimization, each particle
where,
In PF algorithm, although the type of process noise and observation noise does not affect the effect of PF, its variance cannot be determined. Generally, process noise needs to be given at the discretion of the concept of signal-to-noise ratio, while observational noise belongs to the inherent characteristics of sensors and can also be obtained by statistical methods. It is difficult to select the appropriate variance in practical operation, which leads to the increase of estimation error. In the initial stage of SOC estimation, the process noise should be increased in order to quickly correct the SOC, i.e. larger variance value should be adopted. But larger process noise will lead to larger error in the later stage of estimation, so smaller variance value should be adopted in the later stage of estimation [27]. In this paper, PSO algorithm is used to optimize the variances of process noise and observation noise of PF algorithm
With the accurate estimation of SOC as the design objective, the optimization objective of PSO is to minimize the error between the estimation of SOC and the actual SOC value. ITAE method is adopted, that is, the optimization objective function is as follows:
where,
Since the system state variables are two-dimensional and the observation variables are one-dimensional, the PSO optimization algorithm needs to optimize the process noise variances as two-dimensional variables and the observation noise variance as one-dimensional variable, that is, there are three optimization parameters. The specific steps of optimization are as follows:
Initialization. The population is set to 20, that is, the total number of particles in the population is 20. Considering the experience, the range of two variables of process noise variances are set to [0, 10 Calculate the fitness of each particle and determine the current optimal position of the particles according to the following equation:
The updated optimal location and its fitness are preserved in the current individual optimal location. After updating the optimal position and fitness of all the particles, the minimum of them is selected as the optimal position and fitness of the population and the optimal solution of the current generation is updated. Adjust the velocity and position of the current particle using Eqs (24) and (25). If the calculation results exceed the set boundary, the velocity and position of the particle are updated with the boundary value. Check the terminal condition of the algorithm. If the iteration generation is reached or the calculation error is zero continuously, the algorithm will be stopped, otherwise it will continue to execute by returning to step (2). The results are output as variances of process noises and observation noise. So far, the optimization process is over.
The flow chart of SOC estimation system based on PF optimized by PSO is shown in Fig. 3. The input value is the working current of the battery and the error between the estimated value and the actual value of SOC.
In this section, we will consider the SOP estimation of battery under the multi-parameter constraint of voltage, current and dynamic SOC, in which the optimized PF algorithm is used for SOC estimation. In order to estimate the SOP, the peak current of the battery needs to be calculated under the constraint of voltage, SOC and current respectively.
First, the peak current under the constraint of cut-off voltage is calculated. Assuming that the battery is working by using galvanostatic charging and discharging current at the sampling time
Flow chart of noise variance optimized by PSO.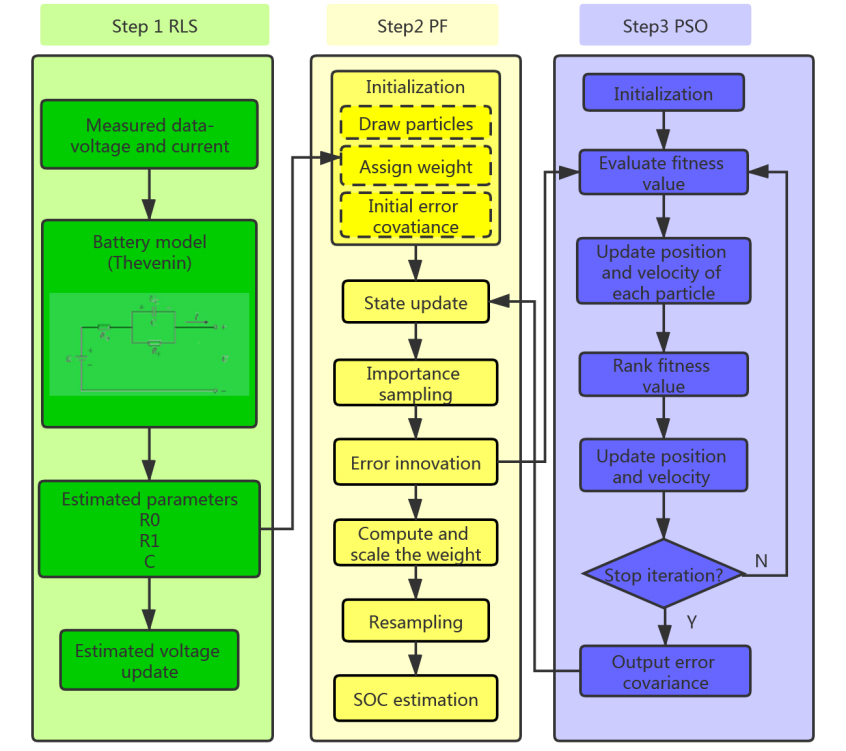
Combining Eqs (14) and (28), we can get
According to Eqs (29) and (16), (17), the minimum charging current of the battery satisfies:
Where,
Similarly, the maximum discharging current of the battery satisfies:
Where,
The peak current of the battery under the restriction of cut-off voltage is obtained as follows:
Where
Secondly, in addition to the battery cut-off voltage constraint, battery SOC is another constraint to predict battery power. When the SOC is close to the lower limit, the discharging current of battery should be reduced and the charging current of battery should be increased to avoid overdischarge. On the contrary, when the SOC of the battery is close to the upper limit, the charging current of the battery should be reduced and the discharging current of the battery should be increased to avoid overcharge. According to Eq. (3), the peak current calculation under SOC limit can be obtained as follows:
Where,
Finally, according to the parameters of the battery, the limitations of the charging and discharging current of the battery are determined. The minimum charging current of the battery is represented by
According to the above constraints, the minimum charging current and maximum discharging current of the battery are calculated as follows:
Using the model-based dynamic SOP estimation algorithm, the peak power of the battery can be calculated according to the following equation
SOC estimation result based on PF algorithm.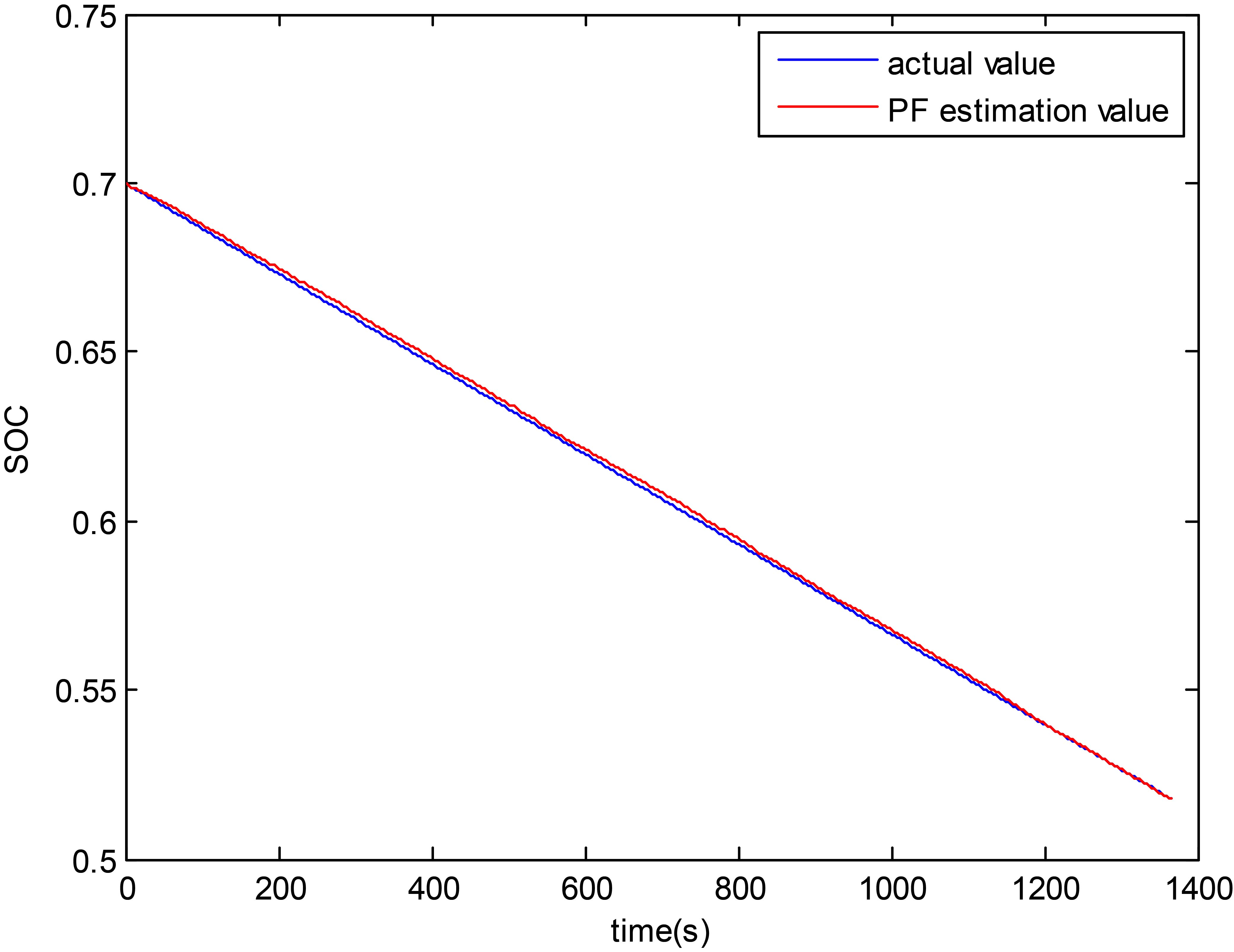
SOC estimation error based on PF algorithm.
SOC estimation result based on PSO-PF algorithm.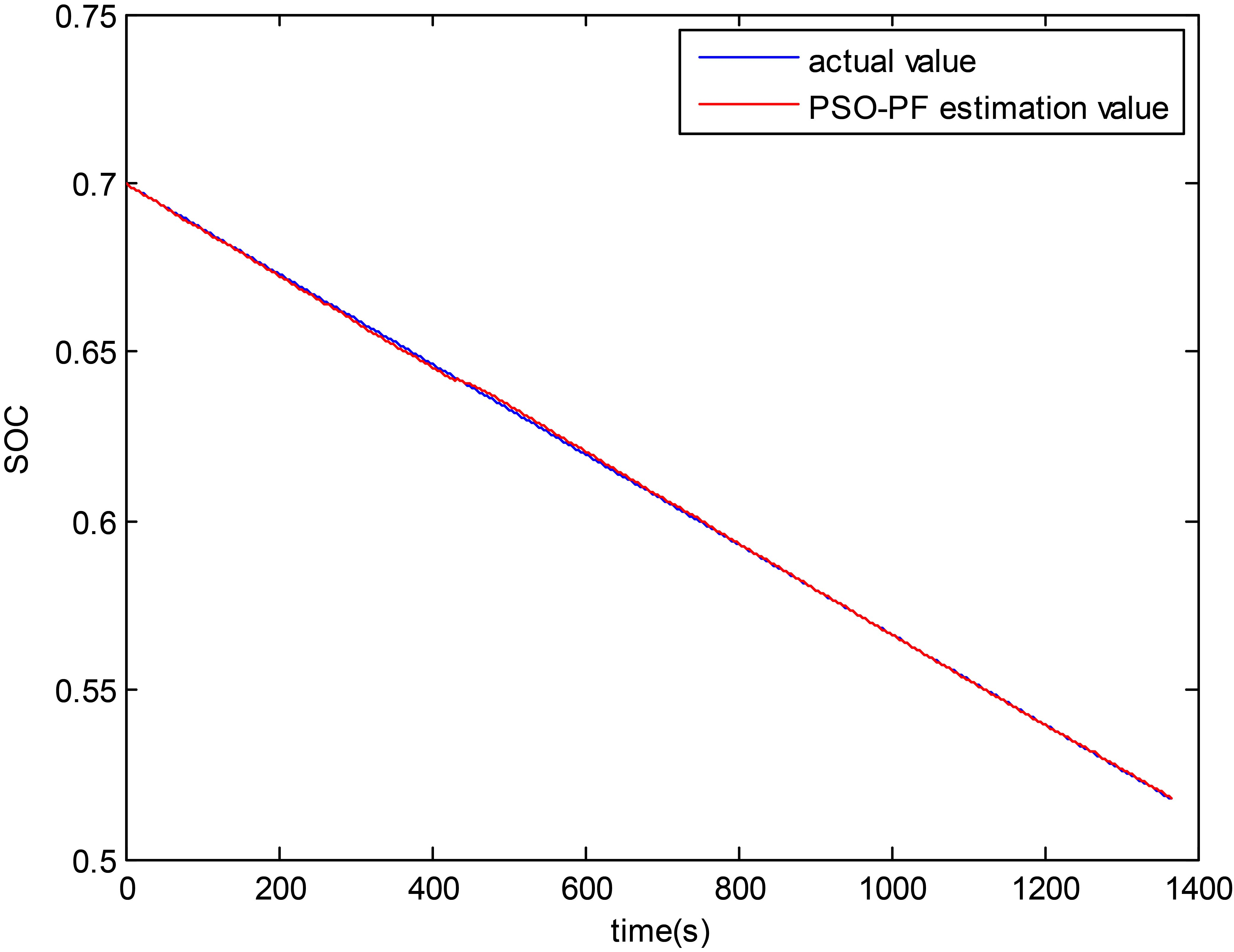
SOC estimation error based on PSO-PF algorithm.
Working current of battery containing discharging current only.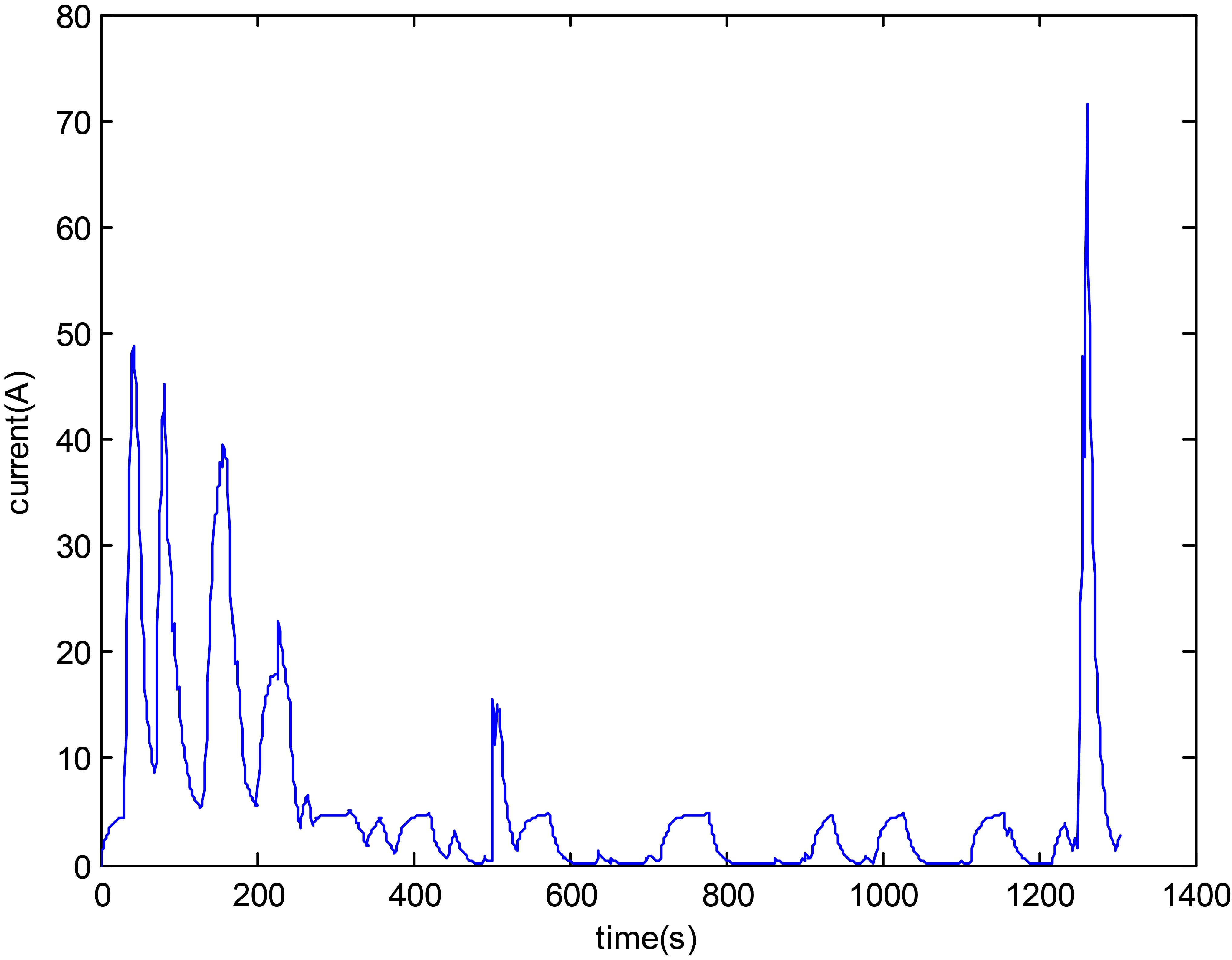
Working current of battery containing charging and discharging current simultaneously.
SOC estimation result based on PF algorithm.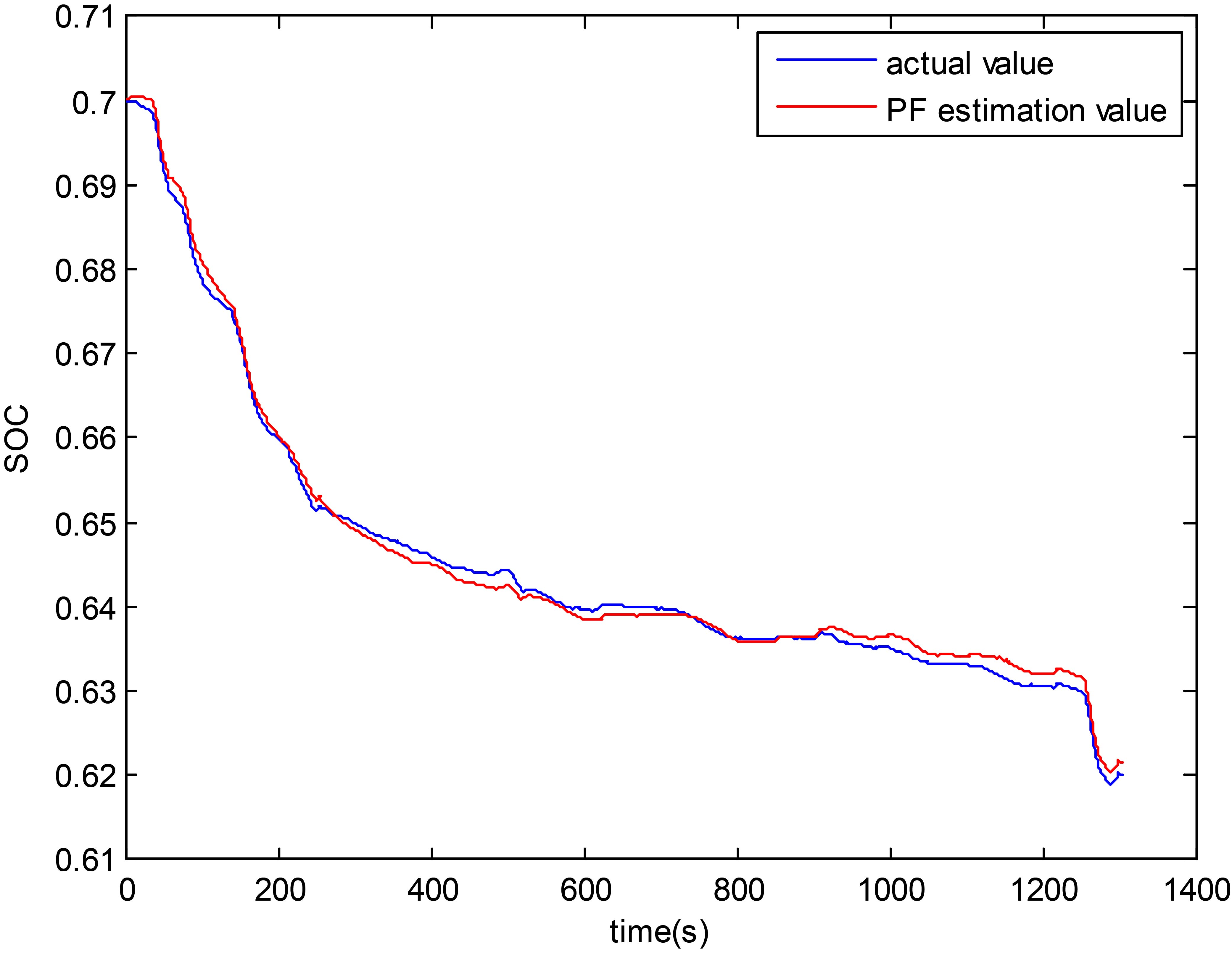
SOC estimation error based on PF algorithm.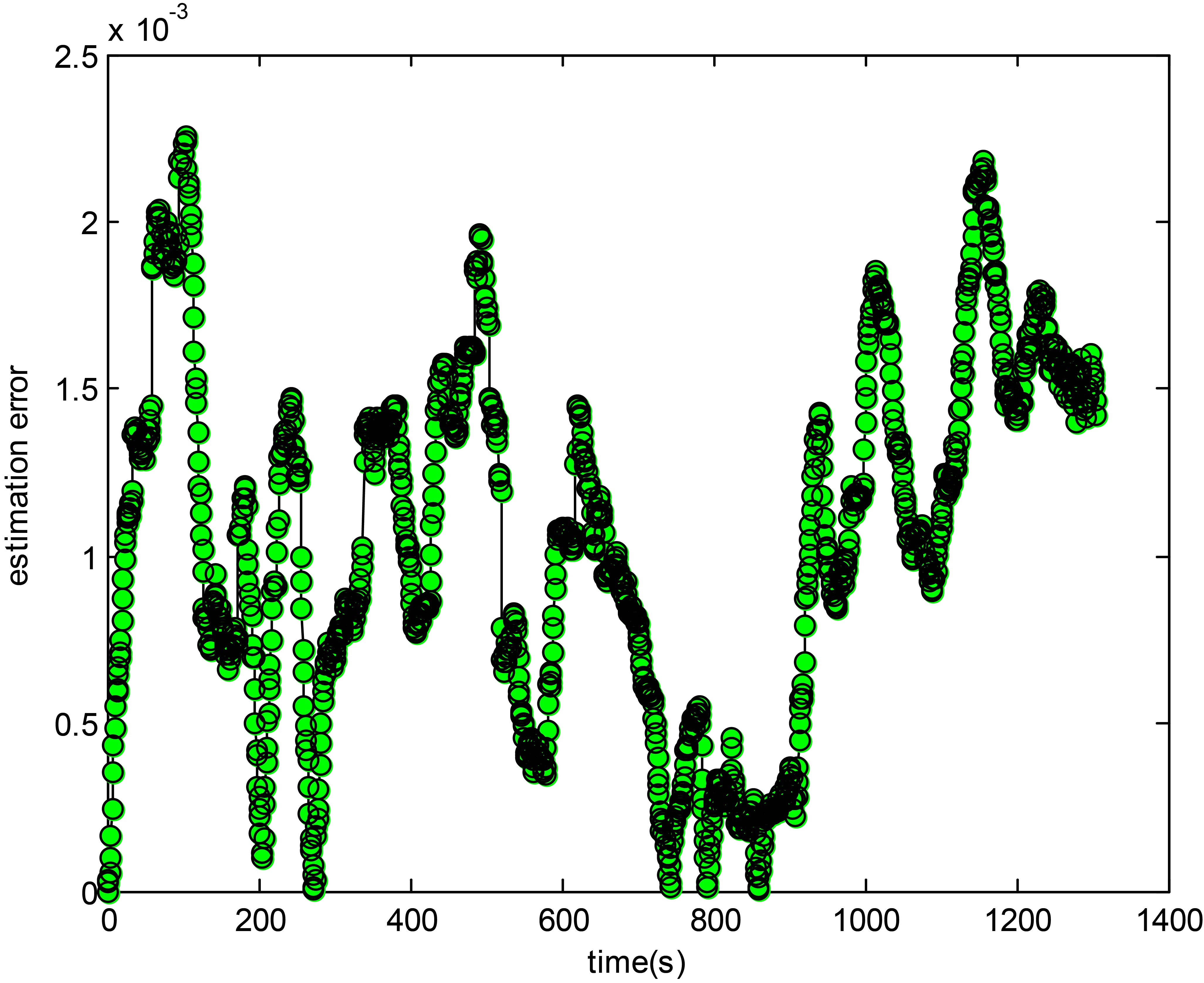
SOC estimation result based on PSO-PF algorithm.
SOC estimation error based on PSO-PF algorithm.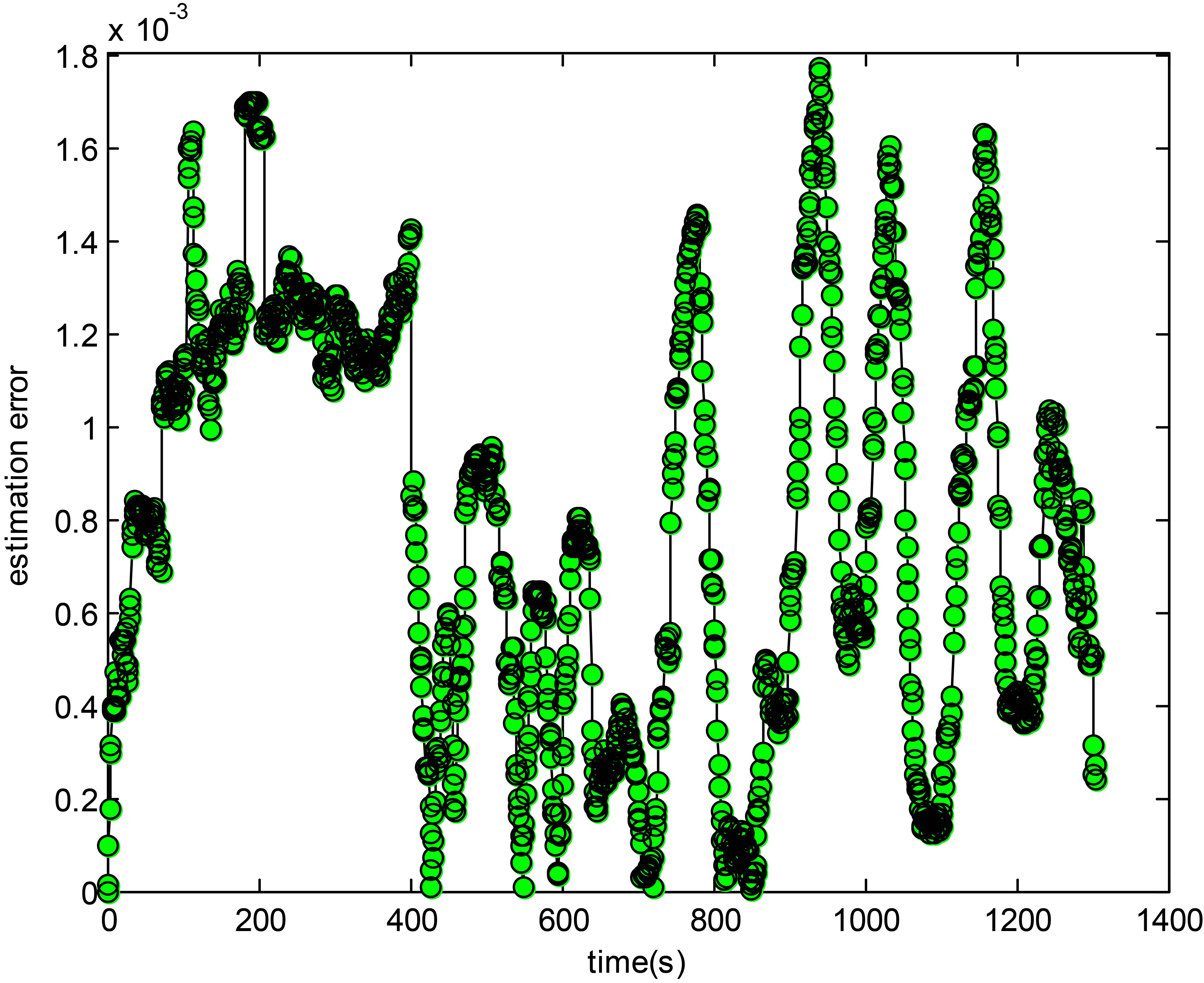
SOC estimation result based on PF algorithm.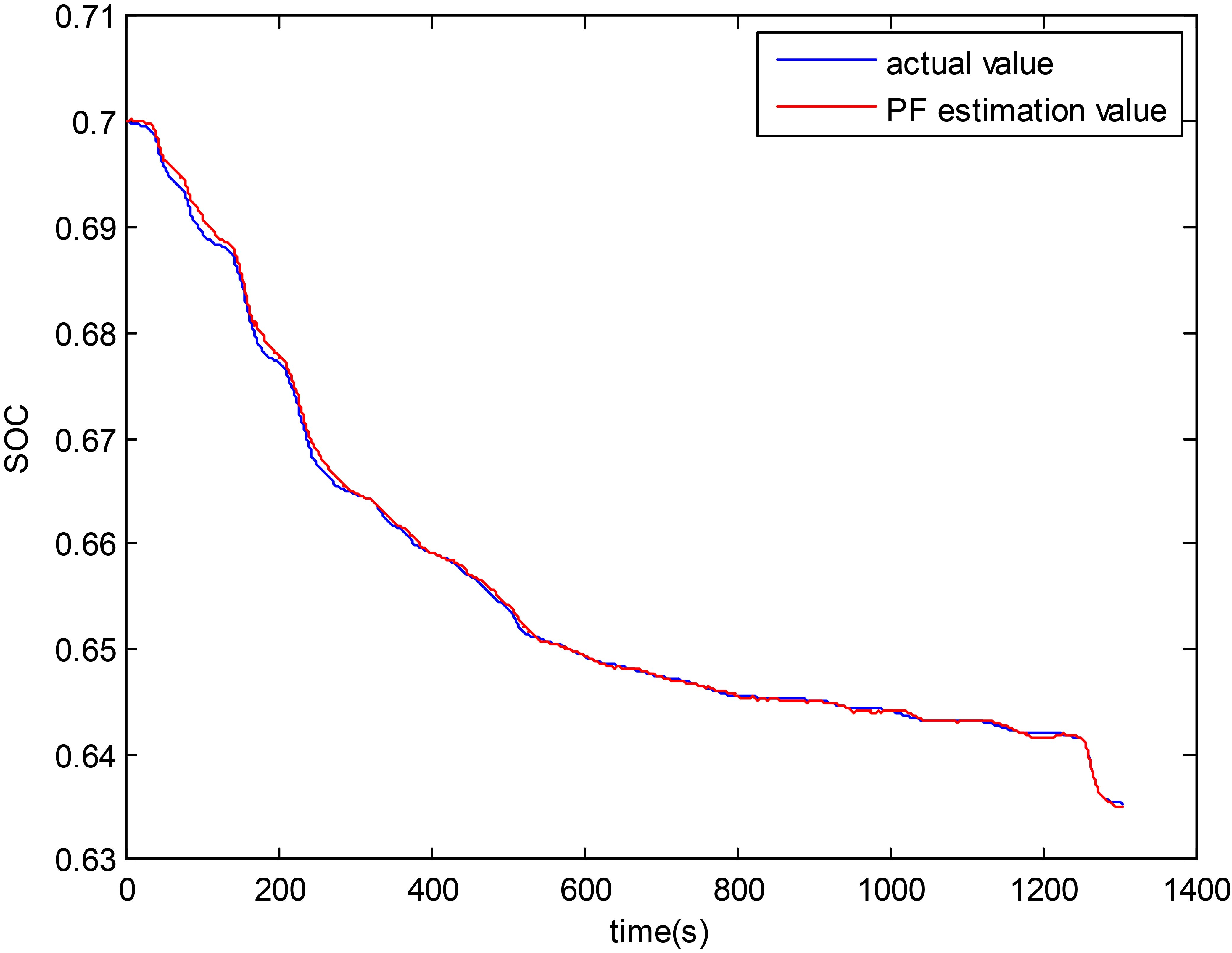
SOC estimation error based on PF algorithm.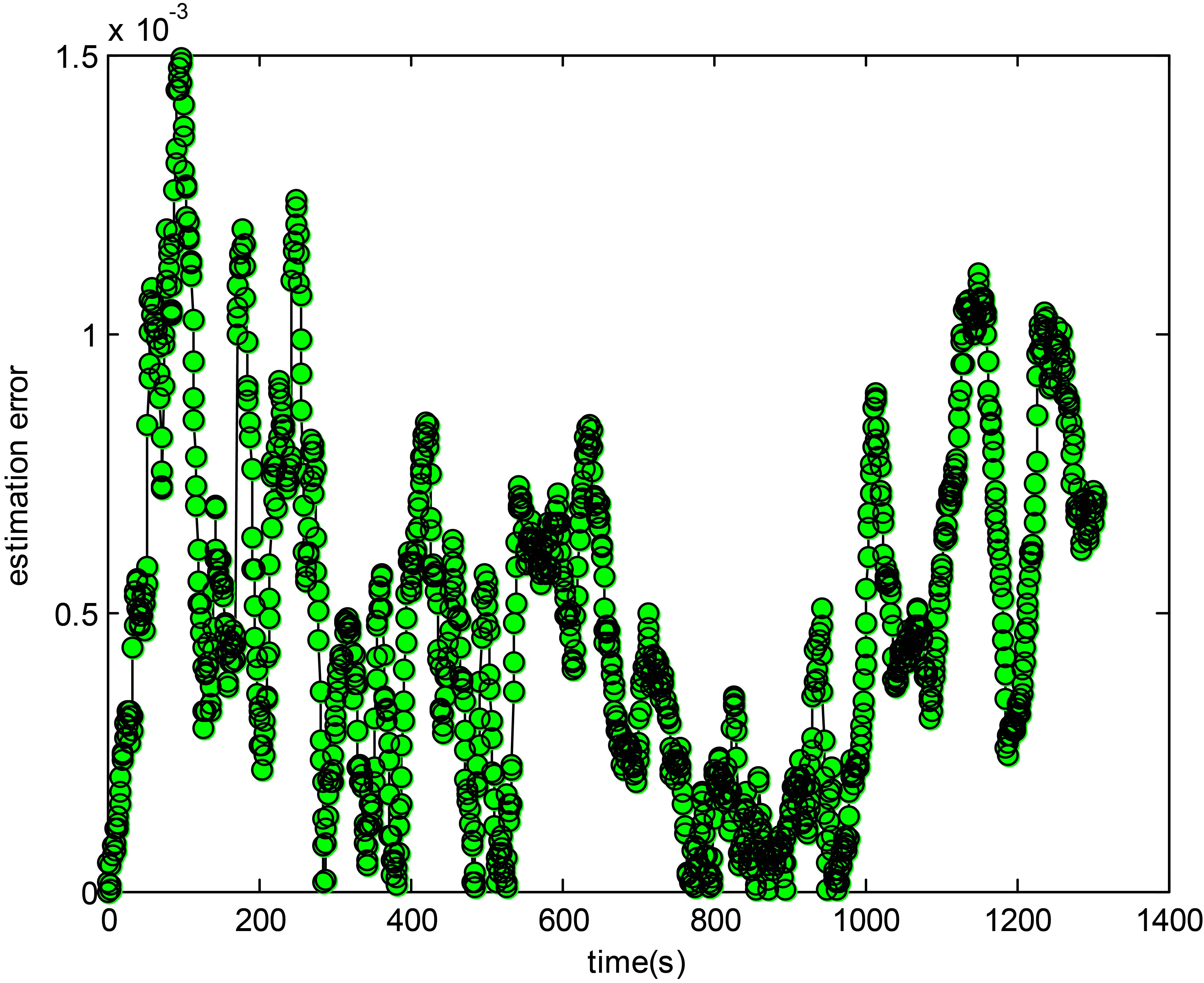
SOC estimation result based on PSO-PF algorithm.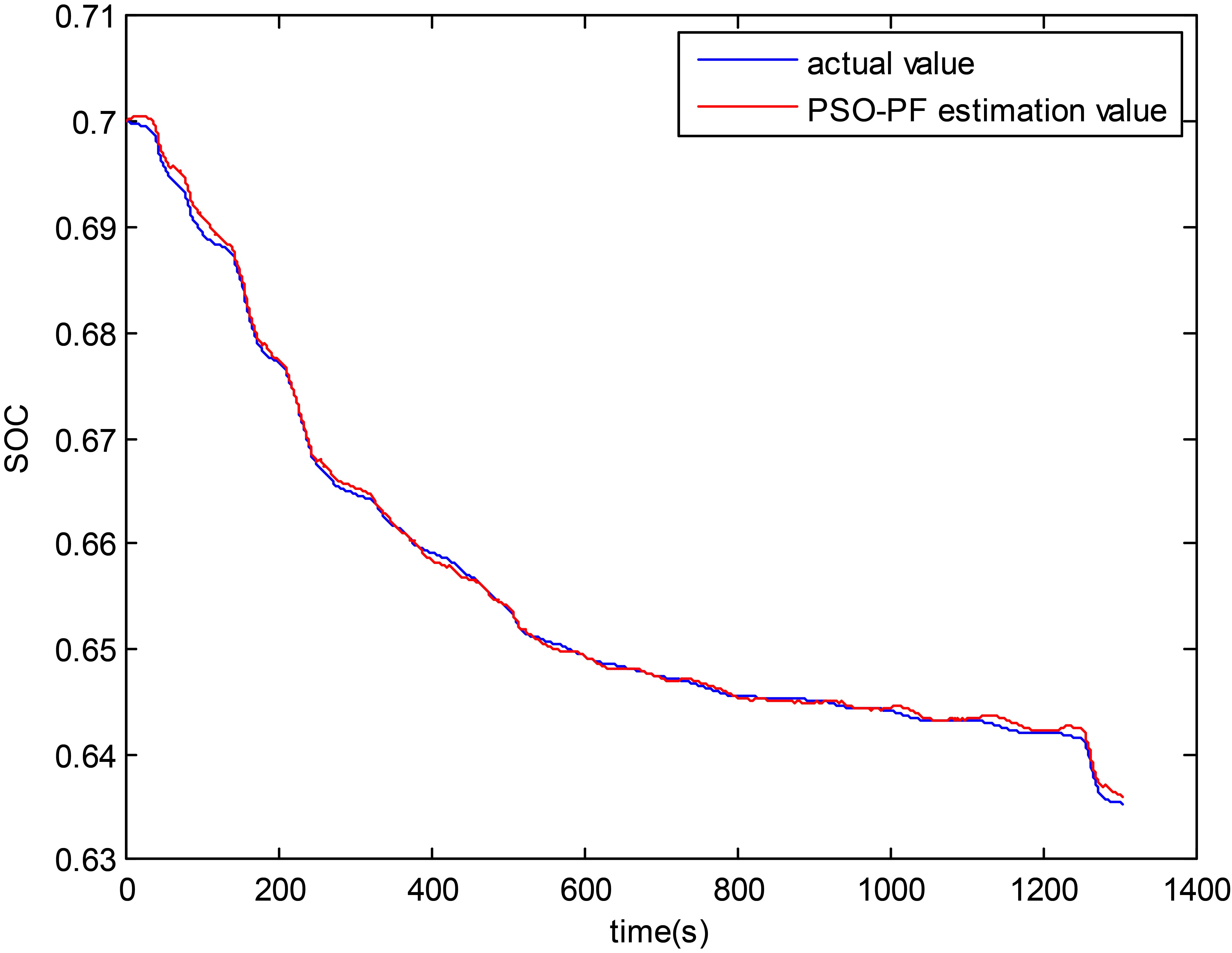
SOC estimation error based on PSO-PF algorithm.
Where,
In this paper, the battery 6-EVFJ-120 produced by Allgrand Battery Company is used as the test battery. The rate voltage of the battery is 12 V, the rate capacity is 120 Ah, the rate current is 240 A (lasting for 5 mins), the upper limit of charging is 12.6 V and the lower limit of discharging is 9.5 V, the battery system is connected in series with 12 batteries. The working temperature is set to 28
SOC estimation at galvanostatic test
The battery is discharged at a galvanostatic test of 0.1 C, and the initial state of SOC is set at 0.7. The results of SOC estimation based on PF are shown in Figs 4 and 5. Figure 4 is the graph of SOC variation and Fig. 5 is the error graph of estimated and actual values. As can be seen from the figure, the estimated results of SOC using PF algorithm can follow the actual values well. The maximum estimated error of SOC estimation using PF algorithm is 2.2
The initial SOC values of 0.7 and a galvanostatic test of 0.1 C are also set. The estimated results and the estimated error graph estimated by PSO-PF algorithm are shown in Figs 6 and 7 respectively. Compared with the PF algorithm, the estimation accuracy of the optimized algorithm is significantly improved. The maximum error is only 1.35
SOC estimation at dynamic current test
In order to verify the dynamic characteristics of the estimation algorithm designed in this paper, take a hybrid electric vehicle with a parallel composite power system consisted of battery and supercapacitor to test the vehicle performance under typical urban cycle in China. The composite power supply system adopts the power split control strategy based on the logic threshold value. After power decomposition, the average demand current is supplied by the battery and the instantaneous large current is supplied by the supercapacitor. According to the different parameters, the current graphs of the battery are obtained as shown in Figs 8 and 9. Only the discharging current contained is shown in Fig. 8, while the discharging and charging current contained simultaneously are shown in Fig. 9.
Firstly, the proposed estimation strategy is tested with the working current in Fig. 8. The results and error graphs of PF algorithm are shown in Figs 10 and 11. It can be seen from the figures that the estimation result can also follow the actual value of SOC by using PF algorithm in the case of dynamic current containing both charging and discharging current. The maximum estimation error is 2.25
Then the PSO-PF estimation algorithm is used for estimation. The results and error graphs are shown in Figs 12 and 13. It can be seen that the maximum estimation error of SOC estimation using PSO-PF algorithm is 1.8
Secondly, the proposed estimation strategy is tested with the working current in Fig. 9. The results and error graphs of PF estimation algorithm are shown in Figs 14 and 15. Because of the charging current, the SOC value is increased. The maximum estimation error is 1.5
The PSO-PF estimation algorithm is used for estimation. The results and error graphs are shown in Figs 16 and 17. It seems similar to the estimation results of Fig. 8. The maximum estimation error of SOC estimation using PSO-PF algorithm is 1.25
The comparison shows that the PSO-PF estimation algorithm proposed in this paper is also applicable to the working environment where the discharging current varies frequently. It shows that this algorithm can be used in on-line estimation of power battery used in HEVs with accurate estimation and fast response. At the same time, the results also show that the proposed PSO-PF estimation algorithm can also be used for SOC estimation of battery with charging current, that is SOC estimation in charge and discharge switching state can be realized.
SOP prediction results based on PSO-PF algorithm.
Considering the actual power demand of hybrid vehicles in driving cycle, this paper predicts the peak discharge power of 30 s as the SOP of battery. Testing under typical urban cycle in China, SOC and
As the discharging current is the same, the blue battery demand power in the figure reaches the maximum power value at 1262 s in both Fig. 18a and b, as shown in the red dot mark in the two figures. As the predicted SOP is within 30 s, the blue battery demand power in the figure reaches the maximum power value at 1262 s, as shown in the red dot mark in the blue line with the power 9.94 kw, corresponding to the predicted power value at 1232 s with the arrow mark on the green predicted maximum discharge power line and the predicted power is about 10 kW. The battery charging power margin in the figures are sufficient, which can fully satisfy the charging power demand. Therefore, it can be determined from Fig. 18 that the battery demand power is within the range of maximum discharge power and minimum charging power in the whole driving cycle, it can satisfy the power demand of the vehicl.
Conclusion
In order to realize on-line state detection of the battery used in HEVs, based on the equivalent circuit model of Thevenin circuit, the FFRLS is used to identify the parameters in the equivalent circuit. PF algorithm based on PSO named PSO-PF is proposed and the SOP prediction of battery in dynamic condition with the battery voltage, current and the optimized estimation of SOC as constraints is realized. The simulation results show that in galvanostatic and dynamic current tests, the PSO-PF algorithm in this paper improves the estimation accuracy by 0.085%, 0.045%and 0.025% respectively compared with the traditional PF algorithm and the estimation error is kept within 0.2%, which has higher estimation accuracy. Moreover, SOP on-line prediction method is suitable for the dynamic power prediction of the battery used in HEVs, which helps to ensure that the battery plays a role in the effective power range.
Footnotes
Acknowledgments
This work was supported by Major Scientific and Technological Achievements Conversion Project in Hebei Province (18042211Z) and Hebei Province Industry Frontier Technology Development Project (18212201D).