
Abstract
Film shovel is the key device for mechanized operation of residual film recovery, in which the depth of soil breakage of the shovel is related to the degree of damage to the plastic film and the recovery efficiency of the residual film. However, the current mode of operation requires experience and visual inspection, which often leads to low level of mechanization and inefficient operation. The topic is to improve the existing residual film recovery device, focusing on the three-dimensional modeling and monitoring system of intelligent film lifting shovel. By optimizing the three-dimensional structure of the intelligent film-lifting shovel and kinematics simulation analysis based on Adams software, the design inclination angle of the loosening shovel is 60
Introduction
After more than 30 years of popularization and practice, the total area of film mulching planting in China has reached 19.791 million hectares, more than 40 kinds of crops will be planted under film mulching, and the use of agricultural film has reached more than 1.2 million tons [1, 2]. The areas covered by plastic film include arid, semi-arid and cold areas such as Hebei, Henan, Shandong, Jilin, Gansu, Xinjiang, Heilongjiang, Yunnan, Sichuan, Shanxi, Shaanxi and Eastern Inner Mongolia. The main crops covered by plastic film are rice, peanut, watermelon, melon, maize, sugarcane, cotton, wheat and tobacco [3, 4]. With the adjustment of crop planting structure in China and the change of global greenhouse effect in recent years, the types and areas of agricultural film mulching planting are increasing year by year [5]. Figure 1 shows the crop mulch planting site map. For a long time, the agricultural film made of polyethylene and polyvinyl chloride is not easy to degrade in the soil for many years, so it needs to be recycled in time. However, due to the lack of farmers’ awareness of recycling and the inefficiency of mechanical devices, a large number of agricultural residual film remain in the soil, destroying the circulation system of soil water infiltration and farmland ecological environment, resulting in slow growth of crop roots, soil hardening, poor permeability, chloroplast death and yield reduction, livestock poisoning by mistake and obstruction of mechanized operation, etc. It has caused serious pollution to the ecological environment of crop cultivation [6, 7, 8]. Figure 2 shows the pollution status of agricultural residue film.
Crop planting.
Present situation of residual film pollution.
Recycling technology of agricultural residue film has attracted great attention. For the recovery of agricultural residue film, the main methods are manual picking up and mechanical recovery. Because of the high labor intensity and low recovery rate of residual film in manual picking up, it is not suitable for large area planting covered with plastic film [9]. With the rapid advancement of agricultural modernization and the continuous innovation of residual film collector, in recent years, the residual film collector has gradually replaced manual pickup, and the suspension film collector represented by the former Soviet Union and the United Kingdom has emerged. The rewinding film collector represented by the United States and Israel, and the drum type film collector represented by France [10]. In China, drum, spring-tooth, nail, chain rake, clamp, pneumatic and screen-type residual film recycling machines have appeared successively [11, 12].
One of the core components of the residual film recycling machine is the film lifting shovel. Its breaking depth is related to the damage degree of the plastic film and the recovery efficiency of the residual film. Throughout the current application of residual film recycling machine, the level of mechanization and intelligence is low, the operation efficiency is not high, the breaking thickness of the film shovel needs manual experience and measurement, the breaking thickness needs to be tested repeatedly after parking, can’t be adjusted online in real time, and the working hours can’t be effectively guaranteed [13]. It is necessary to improve the existing film-lifting shovel. By fixing the film-lifting shovel on the screw slider driven by the servo motor and installing piezoelectric ceramic sensors at the end of the shovel, the German BECKHOFF CX2030 controller and module are used to collect the data of the sensors and control the operation of the servo motor in real time, so that the shovel can intelligently sense the thickness of soil-breaking and automatically adjust on-line, so as to realize the intelligent film-lifting shovel.
Working Principle of Intelligent Film-lifting Shovel. The existing film-lifting shovel is a pair of straight-legged shovel shafts, which are distributed on both sides of the recovery device. Use the traction force of tractor to break soil and film. The depth and degree of breaking soil and film need to be adjusted repeatedly and manually. The improved intelligent shovel uses intelligent control technology and automatic detection technology. The automatic lifting of the depth of the shovel is realized by servo motor driven screw slider. The real-time data of the depth of the shovel is detected by piezoelectric ceramic sensor inside the shovel tip.
Intelligent film-lifting shovel is composed of servo motor, coupling, screw rod, slider, protect cover, loosening shovel, shovel tip and piezoelectric ceramic sensor. The HIWIN KKK40 load type protective cover is selected for the screw slider, which is fixed with the cross beam of the recovery device. Servo motor driver is controlled by BECKHOFF CX2030 controller and transmitted through Ethernet interface of EtherCAT bus. The system is powered by 10A24V DC and 10048V AC batteries. Figure 3 shows the structure of the intelligent film shovel.
The structure of the intelligent film shovel. 1-Servo motor, 2-Coupling, 3-Wire rod, 4-Slider, 5-Cover, 6-Shovel, 7-Shovel tip, 8-Piezoelectric sensor.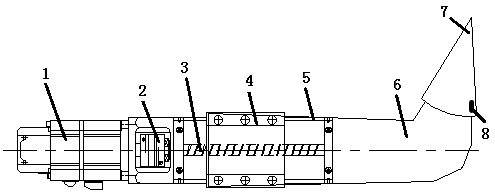
3-D Modeling of Intelligent Film-lifting Shovel. After completing the working principle design and structure design of the intelligent film shovel, the three-dimensional structure model of the intelligent film shovel is built by using Inventor software. The skeleton structure of smart film-lifting shovel is made of stainless steel. Under the Inventor software environment, the soil resistance of the plastic film shovel is simulated and the stress of the intelligent plastic film shovel is analyzed. The inclination angle of the shovel is 60 degrees, and the suitable soil breaking depth of the plastic film shovel is 20–50 mm.
The whole device has well designed servo motor, coupling, screw slider, loosening shovel and shovel tip and other components. Intelligent film-lifting shovel can meet the functional requirements of loosening soil and breaking depth in the process of residual film recovery from the structural design. At the same time, piezoelectric ceramic sensor installed inside the shovel tip can realize real-time online adjustment of breaking depth. The structure design of the whole device is reasonable and the anti-torque performance is good. The three-dimensional structure model of intelligent film-lifting shovel is shown in Fig. 4.
The three-dimensional structure model of intelligent film-lifting shovel.
Adams software simulation. The working speed of the smart shovel is 4–4.5 Km/h. The quantitative relationship between the torque F and the depth d of soil breaking is the key to the design and calculation of the intelligent film-lifting shovel. In order to verify the correctness and reliability of the design of the intelligent film-lifting shovel, transform the Inventor three-dimensional model of the intelligent film-lifting shovel into Parasolid.x_t format and import it into the virtual simulation environment of Adams/view. Constraints are imposed on the operation process of the plastic film shovel, and the topography of the working area is flat, the soil is medium loam, there is no obvious hard matter on the surface, the soil hardness is 6.6 KPa, and the soil moisture content is 25%, to simulate the actual operation process of the intelligent plastic film shovel.
After the analysis of Adams/postprocessor module, the simulation curves of the torques F and the breaking depth d of the spade are obtained, as shown in Fig. 5. In Fig. 5, the blue curve shows the quantitative relationship between the torques F and the depth d of the spade in the simulated environment, and the red dotted line shows the limit value of the torques F of the intelligent film-lifting shovel as the depth d increases.
The simulation curves of torques F and breaking depth d of the intelligent film-lifting shovel.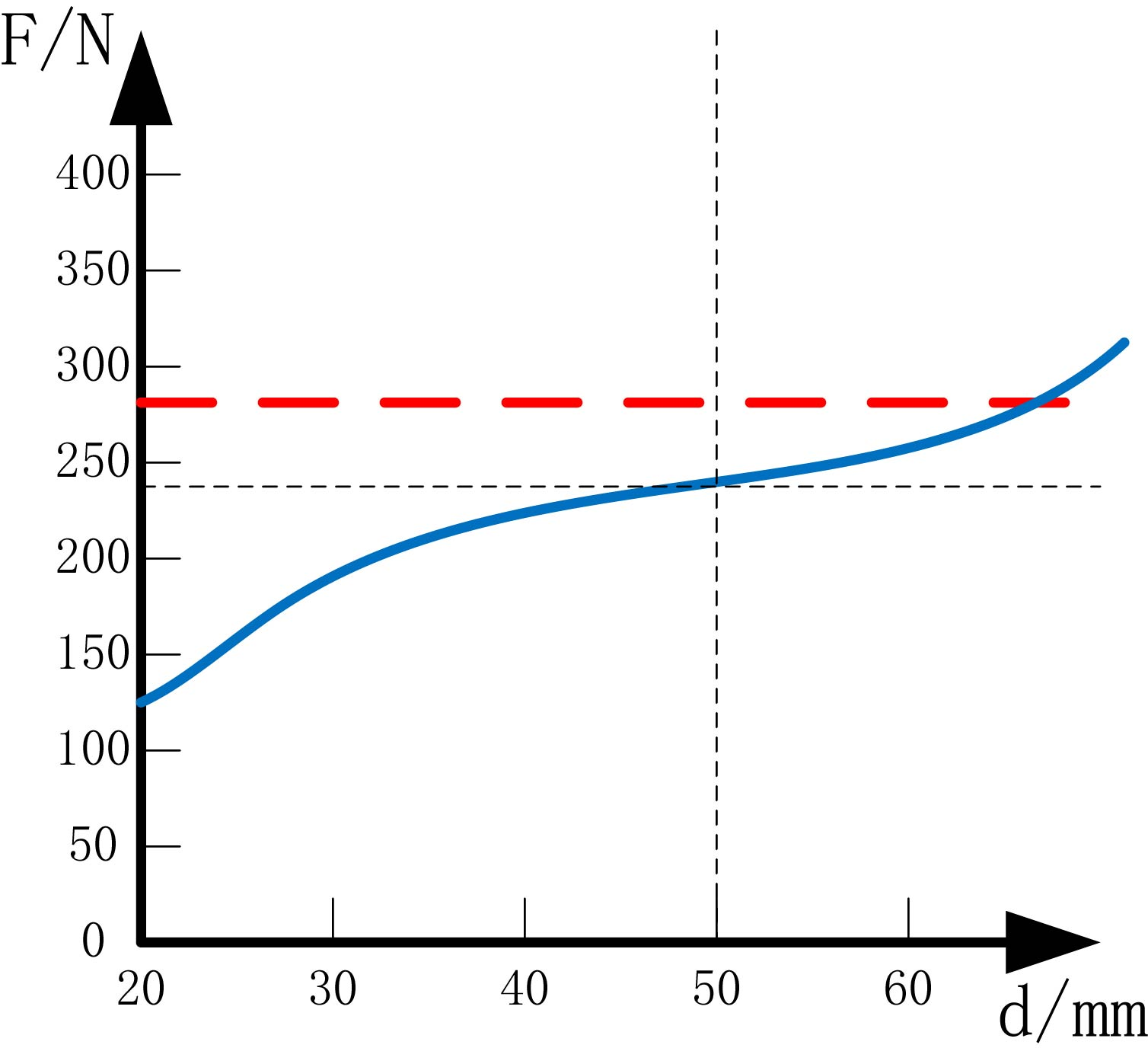
Simulation Results Analysis. Through the analysis of the simulation curves of the torque F and the depth d of breaking soil of the intelligent film-lifting shovel under the simulated environment, it can be found that:
There is a positive correlation between the torques F and the depth d of soil breaking. That is to say, the torques F increases with the increase of the depth d of soil breaking. The torque F of the intelligent film-lifting shovel does not exceed the limit value that the intelligent film-lifting shovel can withstand when the depth of the shovel is within 20–50 mm. In the simulated environment, the correctness of the design and reliability of the intelligent film-lifting shovel is verified. On the other hand, the structural optimization of the film-lifting shovel can be applied in the field of automatic control.
Working Principle of BeckHOFF Controller. CX2030 controller manufactured by BeckHOFF Company of Germany adopts modular slot design and has beautiful and compact appearance. Its TwinCAT software platform based on PC embedding is compatible with all functions of traditional PLC, motion control function, EtherCAT bus function and configuration (HMI) function. It has powerful functions that traditional PLC and single chip computer can’t match [14]. EtherCAT bus is a new communication protocol of Ethernet bus, which can realize the I/O layer of the control system and cover all the devices of the system [15]. TwinCAT software platform can optimize the circuit layout of intelligent film-lifting shovel control system, reduce the number of complex field bus and the probability of failure, and improve the operation efficiency of intelligent film-lifting shovel.
Intelligent film-lifting shovel control system based on TwinCAT software platform is composed of CX2030 controller embedded in TwinCAT NC PTP software, 8-channel digital input and output module, 4-channel analog input and output module, 2-channel PWM output module and power module. The system communicates between upper and lower computers through EtherCAT Ethernet bus protocol [16]. TwinCAT platform adopts the principle of closed-loop control. The two-way communication between CX2030 controller and PC/HMI man-machine interface is carried out through the EtherCAT bus. In TwinCAT NC PTP, TwinCAT NC executes the motion control program compiled by TwinCAT PLC, sends control instructions to the driving controller through the EtherCAT bus, and then controls the motion of the servo motor. The current, speed and position signals of the servo motor are uploaded to TwinCAT PLC through the feedback device. The other logic control real time communicates with TwinCAT PLC through the input and output module [17, 18].
The structure design of intelligent film-lifting shovel mainly includes servo motor, coupling, screw slider, soil-loosening shovel and shovel tip, etc. For real-time monitoring during the operation of intelligent film-lifting shovel, the main monitoring index is the depth of soil-breaking and the torsional force it bears.
With the increase of the breaking depth of the loosening shovel, the torque of the intelligent film-lifting shovel is also increasing. In order to achieve higher working efficiency and reliability of the equipment, the monitoring process of the intelligent film-lifting shovel adopts closed-loop control system, using BeckHOFF controller to issue operation instructions and acting on the servo motor. Under the action of actuator, coupling and screw slider, the loosening shovel is driven to move up and down automatically, thus realizing the function of breaking soil and acting as a membrane. The real-time torque of the loosening shovel during operation is monitored on-line by piezoelectric ceramic sensor in the tip of the shovel, and the analysis is fed back to the CX2030 controller for calculation and analysis. The analysis is displayed on the monitoring interface for operator’s reference and analysis. At the same time, the operator sends instructions again through the monitoring interface to control the operation process of the CX2030 controller. The monitoring principle block diagram of the intelligent film-lifting shovel is shown in Fig. 6.
Principle block diagram of intelligent film-lifting shovel monitoring.
Data Transmission Scheme for Intelligent Film-lifting Shovel. The data transmission scheme of the smart shovel adopts the data transmission module of BeckHOFF CX2030 controller, the data communication of the whole data transmission process adopts EtherCAT Ethernet communication protocol, and the data transmission terminal adopts HMI human-computer interaction interface based on TwinCAT software platform.
Upper Computer Data Transmission. The data transmission hardware of the intelligent film-lifting shovel upper computer includes BeckHOFF CX2030 controller, EtherCAT Ethernet interface and HMI human-computer interaction interface. The BeckHOFF CX2030 controller carries embedded TwinCAT software platform. Through EtherCAT Ethernet interface and CX2030 controller, HMI human-computer interaction interface for real-time online bidirectional communication. The real-time data and instructions of data transmission are displayed and manipulated in HMI man-machine interface.
Lower Computer Data Transmission. The data transmission of the intelligent film-lifting shovel lower computer includes digital signal and analog signal. Among them, digital signal mainly includes torsion control signal, piezoelectric sensor signal, servo motor working parameters and traction speed detection signal, and analog signal mainly includes electronic control system, lifting motion of film shovel, motor fault alarm and traction speed regulation.
In the operation of the intelligent film-lifting shovel, the data transmission process of the lower computer adopts closed-loop control. After CX2030 controller gives control instructions, the control instructions are converted into analog signals through BeckHOFF A/D module, and used to control related analog signals. At the same time, the analog signal is transformed into the CX2030 controller by the BeckHOFF D/A module after amplification and filtering, and the feedback signal is displayed on the HMI man-machine interface in real time.
Data transmission scheme block diagram of the intelligent film-lifting shovel.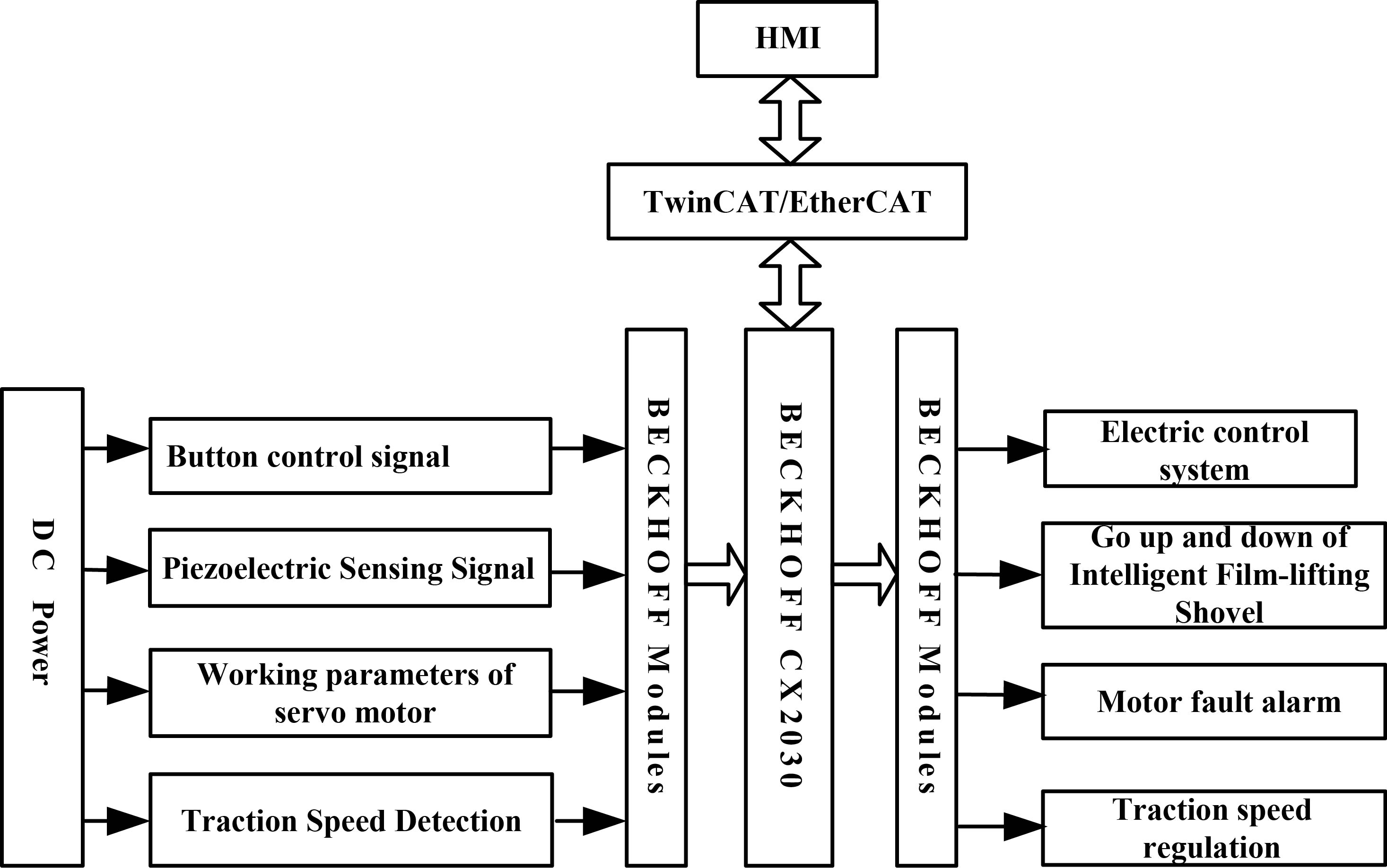
Work Flow of Monitoring System. Before the test operation, check the electronic control system and communication system. At the same time, in order to prevent the overwhelming torque of the shovel caused by too fast traction speed or too large soil resistance, it is necessary to test the traction speed and the depth of soil breaking to determine the matching traction speed and the maximum depth of soil breaking. When the preparatory work is ready, the electronic control system of the intelligent film-lifting shovel is started, and the monitoring interface (HMI) enters the initialization process. Observe whether the EtherCAT Ethernet communication is normal or not. After the communication is normal, set matching parameters on HMI, and issue control instructions. Real-time observe online parameters of torque and parameters of automatic adjustment of loosening shovel. Driven by traction speed of type 40 tractor, of the intelligent film-lifting shovel began to break soil and film normally. If there is a fault alarm during the operation, the monitoring system will automatically alarm and prompt the failure code to terminate the operation. The operation flow of the intelligent film-lifting shovel monitoring system is shown in Fig. 8.
Operation flow of monitoring system.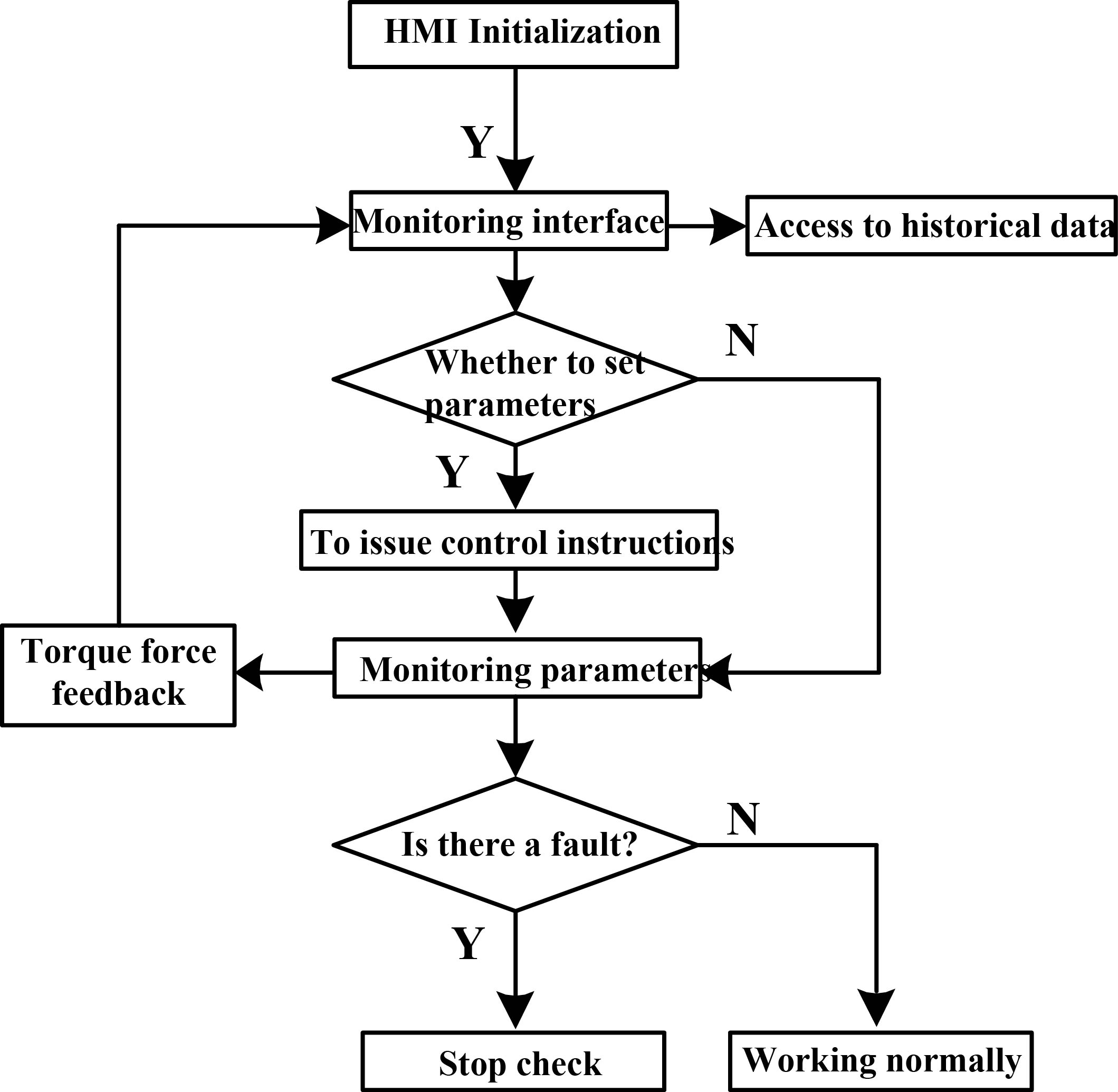
Test Scheme. Field experiments were carried out in the peanut film mulching planting base. The subjects were plastic film residue after harvesting peanuts and ridge planting of peanuts. The ridge height was about 110 mm, the ridge width was 500 mm, and the field ditch width was 400 mm. The surface of the remnant film recycling area is medium loam with no obvious hardness. The soil hardness is 6.6 kPa and the soil moisture content is 25%. The two sides of the plastic film are pressed into the soil. The film thickness is 0.008 mm, the film width is 600 mm, the film covering time is 114 days, and the film is damaged to a certain extent. The intelligent film-lifting shovel is provided with traction by Dongfanghong 40 tractor. The working speed is 4–4.5 km/h and the working width is 600 mm.
Field test results of intelligent film-lifting shovel
The local physical material objects of the intelligent film lifting shovel operation process.
In order to verify the overall system performance, anti-torque capability, operation efficiency and residual film recovery rate of intelligent film-lifting shovel, the whole testing process is divided into three groups. In test A, the walking distance is 30 m, and the depth of soil breaking by shovel handle is 20 mm, 50 mm and 70 mm, respectively. In test B, the walking distance is 60 m, and the depth of soil breaking by shovel handle is 20 mm, 50 mm and 70 mm, respectively. In test C, the walking distance is 90 m, and the depth of soil breaking by shovel handle is 20 mm, 50 mm and 70 mm, respectively. In the process of testing, the depth of soil breaking is automatically adjusted on-line. The recovery rate of residual film and operation efficiency are calculated by simulation software according to the total amount of residual film before and after the sector area in the comparative walking displacement. The overall performance and anti-torque ability of the system are calculated by setting the limit value of the torque force, and adopt alarm prompt. The local physical material objects of the intelligent film lifting shovel operation process are shown in Fig. 9.
Result Analysis. After many field tests, the average value of the middle distribution of each test result is obtained, and the test results as shown in Table 1 are obtained. The test results show that the performance of the intelligent film-lifting shovel system is stable. When the soil breaking depth is in the range of 20–50 mm, the anti-torque ability of the film-lifting shovel is better, the recovery rate of residual film is outstanding, and the operation efficiency of the whole machine is greatly improved. At the same time, when the depth of soil breaking reaches 70 mm, the device will give an alarm and stop the operation, which indicates that the anti-torque capability of the intelligent film lifting shovel needs to be improved, and the structure design of the intelligent film lifting shovel needs to be further studied.
The application of intelligent technology, measurement and control technology and man-machine interface in intelligent film-lifting shovel device has greatly improved the mechanization and automation level of the residual film recovery operation, thus greatly improving the efficiency of the recovery operation. Based on the application of BeckHOFF and EtherCAT networking technology, the wiring engineering of the whole machine is greatly reduced, the failure rate of the electronic control system is reduced, and the flexibility and cheapness of the monitoring terminal are improved, which is conducive to the centralized monitoring of the operation group of the residual film recovery unit. Through structural design three-dimensional modeling, kinematics simulation analysis based on Adams software and field test, it is proved that intelligent film lifting shovel is feasible in mechanized recovery of residual film, and it is an application technology worthy of reference and promotion. At the same time, the anti-torque capability of the film-pulling shovel needs to be improved when the soil-breaking depth is large.
Footnotes
Acknowledgments
Key Project of Hubei Polytechnic University (No.20xjz03A, 20xjz10B). Achievements transformation cooperation project between Wuhan Zondy Testing Technology Co., Ltd. and Hubei Polytechnic University (No. KY2019-147).