
Abstract
The hub motor significantly increases the unsprung mass of electric in-wheel vehicles, which deteriorates the ride comfort and safety of vehicles and which can be effectively improved by optimizing the main suspension parameters of vehicles reasonably, so a multi-objective optimization method of main suspension parameters based on adaptive particle swarm algorithm is proposed and the dynamic model of a half in-wheel electric vehicle is established. Taking the stiffness coefficient of the suspension damping spring and damping coefficient of the damper as independent variables, the vertical acceleration of the body, the pitch acceleration and the vertical impact force of the hub motor as optimization variables, and the dynamic deflection of the suspension and the dynamic load of the wheel as constraint variables, the multi-objective optimization function is constructed, and the parameters are simulated and optimized under the compound pavement. The simulation results show that the vertical acceleration and pitch acceleration are reduced by 20.2% and 18.4% respectively, the vertical impact force of the front hub motor is reduced by 3.7%, and the ride comfort and safety are significantly improved.
Keywords
Introduction
With the rapid increase of car ownership, environmental pollution, energy shortage and other issues are becoming serious increasingly. The development of electric vehicles has become an effective way to achieve energy conservation and reduce environmental pollution [1, 2, 3]. As a kind of pure electric vehicle, in-wheel electric vehicle is also called hub motor drive vehicle or distributed electric drive vehicle. Its main structural feature is that the hub motor is directly installed in wheel, and each electric wheel acts as an independent driving and braking unit [4, 5, 6]. Compared with the traditional fuel vehicle and the centralized drive electric vehicle, the in-wheel electric vehicle chassis structure is simplified greatly and realized the lightweight of the whole vehicle due to the removal of mechanical transmission components such as transmission and differential.
However, the wheel hub motor is connected with the wheel rim rigidly in the conventional electric wheels, which increases the vehicle’s unsprung mass significantly, and has a serious negative effect on the vertical vibration of the vehicle [7, 8, 9, 10, 11], which is mainly reflected in: (1) the vertical vibration is deteriorated, the ride comfort is reduced; (2) the dynamic load of the wheel is increased, which leading to the road companions poor, and reducing the driving safety of the whole vehicle; (3) the vertical impact load produced by uneven road surface on wheel directly acts on the hub motor, which reduces the working performance and service life of the motor. Therefore, hub motor reduces the ride comfort and driving safety of in-wheel electric vehicles directly.
The suspension, as the transmission connection between the body and the wheel, buffers the vertical excitation of the road. The vertical vibration transmitted from road to electric wheel or vehicle body can be effectively reduced by properly matching the damping spring stiffness and damping coefficient of suspension. At present, the mainstream optimization algorithms contain particle swarm optimization, genetic algorithm, pattern search optimization function in vehicle main suspension parameter optimization [12, 13, 14, 15, 16]. However, most of the studies only optimize one of index such as the vertical acceleration of the body and the dynamic load of the wheel and others, and lack the multi-objective optimization of the overall index. In addition, most of the parameters optimization process is only carried out under the specific road surface level by randomly, and the comprehensive evaluation of vehicle performance under different road surface level by randomly is lacked.
Therefore, a multi-objective parameter optimization method of main suspension parameters based on adaptive particle swarm algorithm is proposed and the dynamic model of a half in-wheel electric vehicle is established, which takes the stiffness coefficient of the damping spring and the damping coefficient of the damper as independent variables, the vertical acceleration, the pitch acceleration and the vertical impact force of the hub motor as optimization variables, and the dynamic deflection of the suspension and the dynamic load of the wheel as constraint variables, the parameters are simulated and optimized under the composite pavement composed by different level road randomly.
Dynamic model of one-half in-wheel electric vehicle
In order to facilitate the research, the following assumptions are made in modelling the in-wheel electric vehicles [17]: the vertical movement, wheel and wheel hub motor are only considered and the vibration is linear; the vehicle is symmetrical and the longitudinal axis is axis of symmetry, and the road roughness function of the left and right wheels is equal; the distribution mass of all suspension systems is equal; the vertical stiffness of all tires is equal; The body pitch angle changes in a small range. Then the simplified dynamic model of the half in-wheel electric vehicle is shown in Fig. 1.
A half dynamic model of the in-wheel electric vehicle.
In Fig. 1,
Assuming the moment inertia of vehicle pitching motion is
Adaptive particle swarm optimization (APSO algorithm) is a kind of algorithm based on the social behavior of individuals and groups [18, 19, 20, 21], which has the advantages of simple programming, fast optimization speed and significant optimization effect. In this algorithm, the particle’s own state is represented by a set of specific position and velocity vectors, which respectively represent the feasible solution of the problem and its search direction in the search space. The update formula of speed and position for each particle is as follows:
Where,
In order to avoid the shortcomings of the traditional PSO algorithm that the iterative process is easy to fall into the local optimization, the APSO algorithm adopts the adaptive inertia weight updating method, and the updating formula is shown in Eq. (8). This method can not only enhance the global optimization ability, but also improve the local search ability of particles near the optimal solution, and accelerate the convergence speed [22].
Where,
Then, the suspension parameters of the in-wheel electric vehicle optimization flow chart based on the adaptive particle swarm algorithm is shown in Fig. 2.
Block on suspension parameter optimization using APSO algorithm.
Objective function constructed
Taking the vertical acceleration, the acceleration of the pitch angle and the vertical impact force of the hub motor as the optimization variables, the dynamic deflection of the suspension and the dynamic load of the wheel as the constraint variables, and the stiffness coefficient of the damping spring and the damping coefficient of the damper in the main suspension as the parameters to be matched, the objective function is constructed as follows:
Where,
In order to ensure the adhesion performance and handling stability, the optimized suspension parameters shall meet the requirements that the probability of the wheel leaving the road is less than 0.15%, and the probability of the suspension hitting the stopper is less than 0.3%. Therefore, the constraint conditions are established as follows [23]:
Where,
At the same time, in order to ensure that the vehicle has ride comfort, the bias frequency and damping ratio of the suspension are properly constrained, and the limiting conditions are as follows [24]:
Where,
Initial simulation parameters
Parameter optimization results
Comparison of the body vertical acceleration in time domain.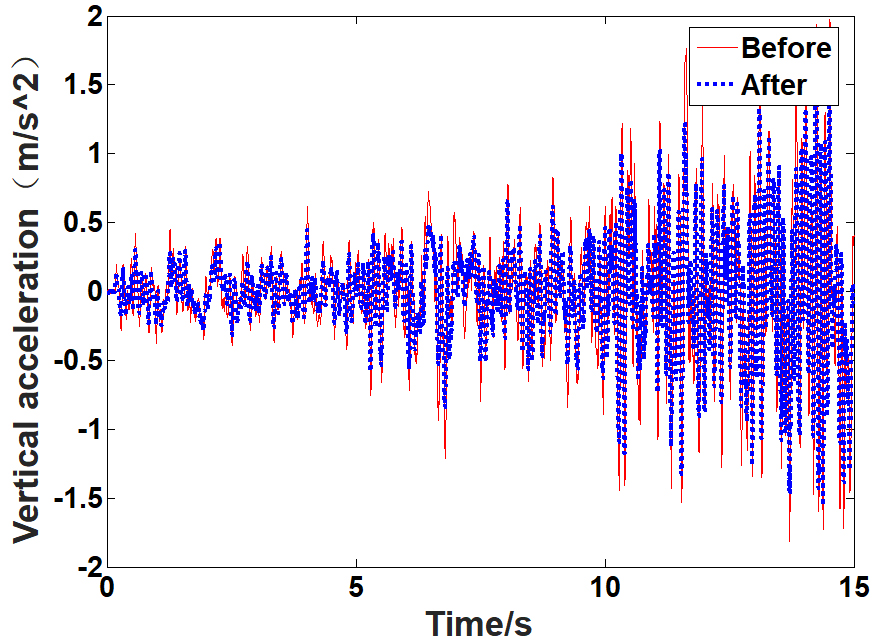
Comparison of body pitch acceleration in time domain.
The parameter optimization condition is that the vehicle drives at constant speed on the compound road composed of B-level, C-level and D-level roads by randomly, the road excitation model is calculated by filtering white noise, and the rear wheel road excitation is obtained by fixed time delay of the front wheel excited. The road excitation model can be established as follows:
Where,
The weight coefficients of each index are
The statistical results are shown in Table 2 after parameter optimization. The time-domain comparison curves of vertical acceleration, pitch acceleration and vertical impact force of front hub motor of the vehicle model before and after optimization are shown in Figs 3–5 respectively.
Comparison of vertical impulse force of in-wheel motor in time domain.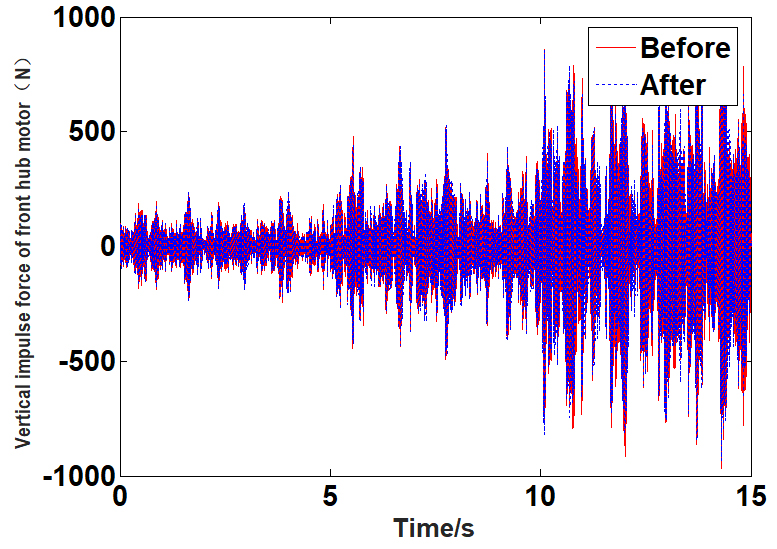
It can be seen from the Fig. 3 to 5 that after the optimization of suspension parameters, the vertical acceleration and pitching angle acceleration of the in-wheel electric vehicle are optimized by 20.2% and 18.4% respectively, the vertical impact force of the front hub motor is optimized by 3.7%, and the comprehensive performance of the vehicle is significantly improved.
The multi-objective optimization function is constructed by taking the vertical acceleration, the pitch acceleration and the vertical impact force of the hub motor as the optimization variables, and the APSO algorithm is used to realize the reasonable optimization of the stiffness coefficient and the damping coefficient of the damping spring of the suspension of the in-wheel electric vehicle on the compound road. The simulation results show that the vertical acceleration and pitch acceleration are improved by 20.2% and 18.4% respectively, the vertical impact force of the front hub motor is improved by 3.7%, and the comprehensive performance of the vehicle is improved significantly, which proves that the multi-objective optimization of the main suspension parameters based on the APSO algorithm is effective.
Footnotes
Acknowledgments
The authors acknowledge the Henan Province Science and Technology Project (182102210508) for financial support.