
Abstract
Because the formation path information is not extracted in the process of robot formation motion path cooperative control, the image processing time is long and the effect of avoiding obstacles to reach the target position is poor. Therefore, a robot formation motion path cooperative control method based on machine vision is proposed. Through the design of embedded chip control module, image acquisition module and communication module, the application process of machine vision technology is designed, and the target features in the motion path of robot formation are extracted, including other robot targets and obstacle targets in the formation. Then, the formation path information is extracted based on image preprocessing. On this basis, using the formation form of virtual structure-driver following method, the obstacle avoidance control of robot formation motion path is completed by potential field method. The experimental results show that after using this method, the images of its CCD camera when performing various processing are less than 200 ms. The moving environment image shows that this method has high processing performance for robot formation, and under the control of this method, the formation can change the formation and intelligent robot to avoid obstacles and reach the target position.
Keywords
Introduction
With the great progress in robotics, automatic control, communication and hardware sensors, multi-robot cooperation has become a reality and is gradually out of the laboratory and applied in reality. Multiple intelligent robots are used to form a multi-robot system, and the environmental perception ability of each member of the system is limited. While the structural design cost of the whole system is reduced, the security of the system is increased [1].
Collaborative cooperation among multiple robots can complete tasks that are time-consuming or difficult to be completed by a single robot. In the collaborative cooperation problem of multiple robots, the formation problem of multiple robots is a basis for studying other cooperative problems of multiple robots [2]. The control of multi-robot formation is reflected in that multiple robots form a certain formation shape, and can keep the corresponding formation shape in the process of the whole formation to the target location. At the same time, the whole robot formation must be constrained by environmental conditions to achieve basic actions such as obstacle avoidance. In multi-robot formation, the main cooperative problems are avoiding conflicts and keeping corresponding formation. For a multi-robot system, multiple robots keeping a certain formation shape can make full use of each member to complete the task, shorten the task completion time, reduce the execution cost of the system and improve the work efficiency. Multiple robots can also fully obtain the information of the surrounding environment and improve the robustness of the system [3].
In recent years, with the continuous development of robot technology, multi-robot cooperation research has entered a new stage, and has been more and more applications. The cooperative work of multiple robots can accomplish tasks that are difficult for a single robot, and the formation of multiple robots is a typical problem in the cooperative work of multiple robots. At present, multi-robot collaborative control system has become one of the research hotspots in the control field and systems engineering, attracting extensive attention from experts in robotics, mathematics, physics, biology and other related fields [4].
Therefore, the cooperative formation control method of vehicle-type mobile robots based on single-path guidance is designed [5]. In order to solve the problems of slow convergence speed and uneven path in traditional genetic algorithm, the method adds the path smoothness factor into fitness function, and the path with better smoothness is easier to be selected. Then, in population selection, the optimal individuals were directly copied to the next generation, effectively preserving the good genes of the father generation. In the path planning stage of the pilot robot, the improved genetic algorithm is used to plan an optimal path without collision and with good smoothness. In the following stage, the pilot following method is used to control each robot to keep a specific distance and angle with the leader, so as to form a set formation. A distributed multi-robot formation control method based on state switch is designed [6]. This method designs a state switching trigger mechanism based on compound information, and selects one or more algorithms for formation control through the robot’s own state and the surrounding environment. Then, a formation feedback mechanism based on ultra-wideband ranging (UWB) is proposed. The UWB data structure is simple and easy to be processed on the micro mobile robot, and the formation maintenance and feedback are completed in real time. At the same time, a distributed state estimation algorithm is proposed to provide the running state of the robot for the trigger mechanism. A formation control method of three-wheeled robots based on Backstepping is designed [7]. Aiming at the path trajectory tracking control problem of non-holonomic three-wheeled robots, the formation problem based on pilot-follow mode was first transformed into the motion trajectory tracking problem of following robots to their respective virtual pilots, and then the kinematics equation of system pose error was obtained. Then the Backstepping method is used to construct the cooperative formation control strategy of nonlinear system. An improved ant colony algorithm based laser scanning laser acoustic microscope (SLAM) is designed to solve the path optimization problem of mobile robots in unknown scenarios [8]. The method is composed of scene reconstruction and path optimization. The estimated value of generalized Kalman filter is updated by the feature information observed by lidar sensor, the scene understanding information point cloud is established to construct two-dimensional raster map, and the path optimization is carried out according to the scene reconstruction map information combined with the improved ant colony algorithm.
Machine vision is a rapidly developing branch of artificial intelligence. Simply put, machine vision is to use machines instead of human eyes to do measurement and judgment. Machine vision system is through machine vision products (i.e., image intake device, divided into complementary metal oxide semiconductor (CMOS) and charge coupled device (CCD) two) will be taken into the target into image signals, transmitted to the special image processing system, get the shape of the target, according to the pixel distribution and brightness, color and other information, into digital signals. The image system performs various operations on these signals to extract the characteristics of the target, and then controls the action of the equipment on site according to the discriminant results. Therefore, based on the traditional path control method, this study designed a new cooperative path control method for robot formation movement based on machine vision technology. The specific research route of this method is as follows:
Through the design of embedded chip control module, image acquisition module and communication module, the modular design of machine vision is carried out; The target features in the motion path of robot formation are extracted by machine vision; According to the extracted formation path information, using the formation form of virtual structure-driver following method, the obstacle avoidance control of robot formation motion path is completed by potential field method.
The most basic characteristic of machine vision system is to improve the flexibility and automation of production. In some dangerous working environments unsuitable for manual operation or occasions where artificial vision cannot meet the requirements, machine vision is commonly used to replace artificial vision [9]. Machine vision inspection system using CCD camera will be the goal of the converted into image signal and send it to the dedicated image processing system, according to the pixel distribution and brightness, color and other information, into a digital signal, image processing system for these signals for a variety of operations to extract target feature, such as size, number, location, length, Then output the results according to the preset tolerance and other conditions.
Embedded chip control module
Embedded control chip has the characteristics of high stability, small volume and flexibility, and has high processing performance when applied to image processing and other data processing [10]. In this study, TMS320DM6437ZWTQ6 embedded DSP chip is selected, which has high processing performance control chip. Its advantages are mainly reflected in the following aspects:
The main frequency of the control chip is up to 850 MHz. Each clock cycle can realize the parallel execution of 8 32 bit instructions, with a processing performance of up to 7000 MIPS. The control chip adopts a double-layer cache interface, which can realize flexible cache allocation and improve the operating performance of the robot path tracking system.
The interface structure of TMS320DM6437ZWTQ6 embedded DSP chip is shown in Fig. 1.
Diagram of embedded control chip interface.
In Fig. 1, the embedded control chip is connected with the memory, video decoder and serial port to collect and process the environmental information during the formation movement of robots, and store cached images and data through the memory. The video of robot formation movement path collected by camera is transmitted to chip by video decoder.
In this study, the automatic exposure mode with a resolution of 2048
Image acquisition scheme for robot formation moving environment.
As shown in Fig. 2, the image acquisition card is connected with A CCD camera and an embedded board, and image transmission antenna and image receiving antenna are used to form an image transmission module. The accurate image acquisition of the robot formation moving environment is completed through both picture transmission and data transmission channels simultaneously.
CCD camera adopts monocular visual navigation mode, and the camera is installed at a height of 60 cm from the robot to the ground. The camera has a resolution of up to 1024
In communication module, serial communication and Ethernet communication mode, connected to the robot and control chip and control chip and the communication between upper machine, the use of wi-fi network will CCD camera in the mobile environment of robot team formation to image sent to embedded control chip, and use the TCP/IP communication protocol to achieve image acquisition process of network connection. The main control module is connected with CCD camera and robot through serial port.
Feature extraction of moving path based on machine vision technology
When the interval time is short, the robot formation movement environment is set as static by default, and the feature of moving path is extracted by machine vision technology. When the environment changes smoothly, it can directly detect the target information in the path, including other robot targets and obstacle targets in the formation. If there are many random interference factors in the surrounding environment, it is necessary to use multiple sets of images obtained and the correlation between frames to identify target information according to the difference between consecutive frames [12].
The grayscale variation is used to describe the target information, and the grayscale difference of the background is set to 0 by default, so the collected image sequence is as follows:
where
On this basis, the image background is restored by selecting appropriate frames in the whole image sequence using the relevant laws of the changes of each pixel in the image along the time axis. In the process of background acquisition, the more image data is processed, the more effective information is obtained, and the more accurate the feature extraction result is. The high-brightness noise in the background image occupies very few pixels in the gray matrix and usually appears in the form of a single pixel. The local visual contrast of the image is used to process the image information of each frame, as shown in Fig. 3.
Target feature extraction diagram.
As shown in Fig. 3, the contrast between the initial frame area and the eight sub-areas of its neighborhood is used as the target feature. During the detection and extraction of the initial frame, the method in the figure is used to lock the initial position of the robot driving, lock the target area, and complete the feature extraction of other robot targets and obstacle targets in the formation.
In the above process, embedded chip module, image acquisition and communication module of robot formation moving environment are designed, so as to realize the application of machine vision technology, and extract target features of moving path based on machine vision technology. On this basis, the image of robot formation moving environment is preprocessed, and the initial path information of robot formation is extracted. Then the pilot-follow method is used to control the robot formation, and the potential field method is used to avoid obstacles.
Image preprocessing
Image normalization is an important preprocessing step. After unified quantitative processing of the collected image data by normalized operation, the situation that some image features are ignored can be effectively reduced [13].
The effect of normalized processing on the image of robot formation moving environment is to present the statistical distribution of samples, and the data interval is normalized to [0,1], so that the interval presents the coordinate distribution. Therefore, the z-score method is adopted in this study to normalize image data to the interval [0,1], and the process is as follows:
where
In this study, Canny operator was used to extract the edge discrete points of the robot formation moving environment image to obtain the coordinate discrete points of the path information in the image, and the Hough transform method was used to fit the discrete points to obtain the robot moving path recognition results in the image. Then, the coordinate transformation method of robot moving path information is designed by image recognition technology, and the path control parameters of robot are obtained, including displacement deviation and Angle deviation of robot moving.
Suppose
where
Based on the control idea of traditional pilot-following formation method, this paper proposes a virtual pilot-following method based on relative distance-angle formation mode.
Virtual structure describes the rigid formation of robot formation. The pilot robot is a fixed reference object in the formation, and the following robot follows the corresponding virtual robot in the rigid formation to ensure formation [14]. The formation control problem can be transformed into the tracking problem of following virtual robot. By changing the relative distance and Angle, the formation of any arbitrary can be changed, which has certain feasibility. Taking a formation composed of three robots as an example, the pilot-following formation structure of the virtual structure proposed in this study is shown in Fig. 4.
Navigation-follow structure diagram of virtual structure.
In Fig. 4,
Among them, the pose of the pilot robot is
Taking the following robot
By changing the distance and Angle between the pilot robot and the following robot, the input value of the robot’s moving speed can be changed. The selected control behavior
When Eq. (7) is established, it means that every following robot in the formation reaches its corresponding virtual following robot position, and finally forms the desired formation to complete the task of the formation.
On this basis, the formation controller is set up. In
where
Heading control is carried out on the Y-axis, and its control error
where
Then, the proportional-integral control method is introduced to determine the control law of different directions. Assuming that
where
On the basis of the formation control, the potential field method is used to complete the obstacle avoidance control of the robot formation moving path.
In the virtual environment, the robot moves in a repulsive field around the obstacle and a gravitational field around the target. Under the combined action of gravity
However, when the robot, the obstacle and the target point are in the same line, the
In view of the above local minimum, a virtual repulsive rotating potential field is added to the traditional potential field method in this study, as shown in Fig. 5.
Virtual repulsive rotational potential field.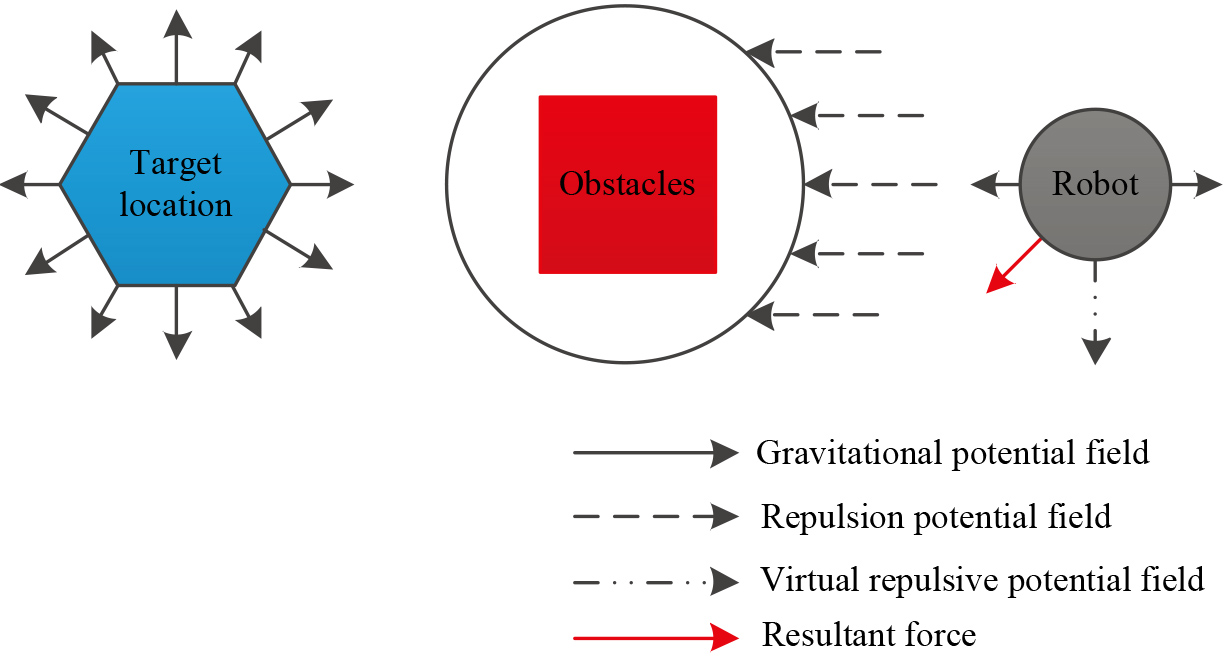
In Fig. 5, the gravitational potential field function of the pilot robot is:
where
Similarly, the robot is considered to be in the range of the repulsive potential field only when the distance between the robot and the obstacle is less than the rated threshold
where
The pilot robot calculates the coordinate track of the leader and the follower at the next moment according to the gravity generated by the target point and its own traveling speed. According to the sensor constantly detect the surrounding environment, when the sensor detection distance is greater than the rated threshold, the robot only receives the gravitational action generated by the target point; When the sensor detection distance is equal to the rated threshold, the robot walks into the local minimum trap. At this point, the rotational potential field force of the repulsive force increases sharply, and the direction is perpendicular to the original direction of the repulsive force. The resultant force of the pilot robot will change. Under the joint action of the gravitational force, the repulsive force and the virtual potential field force, the reverse collinear and equivalent situation of the gravitational force and the repulsive force is broken, and the trap area of the local minimum is gradually escaped. When the sensor detection distance is less than the rated threshold, the balance of gravity and repulsion force is broken, and the repulsion rotating potential field gradually decreases, and the influence on the robot can be ignored. The leader will lead the follower to approach the target point slowly under the combined force toward the target.
In order to verify the practical application performance of the robot formation movement path cooperative control method designed above based on machine vision, the following experimental process is designed.
Experimental environment design
The experiment takes the formation of three robots as the object, and the experimental scene is shown in Fig. 6.
Experimental parameters are shown in Table 1.
Experimental parameters
Experimental parameters
Experimental scene diagram.
CCD camera mounted on the robot is used to collect the path information of the robot in different light intensity ranges in the same environment. After the path information image is collected, the collected image is processed to obtain the robot path information.
In the experiment, the robot formation can not only form any formation, keep the formation stable, but also switch formation at any time, and can avoid obstacles in time and reach the destination smoothly, so as to achieve the goal of optimizing formation control.
Firstly, the time consuming of processing robot path image by image vision technology using the method in this paper is counted under different light intensity. The statistical results are shown in Fig. 7.
The method in this paper is time-consuming for image recognition processing.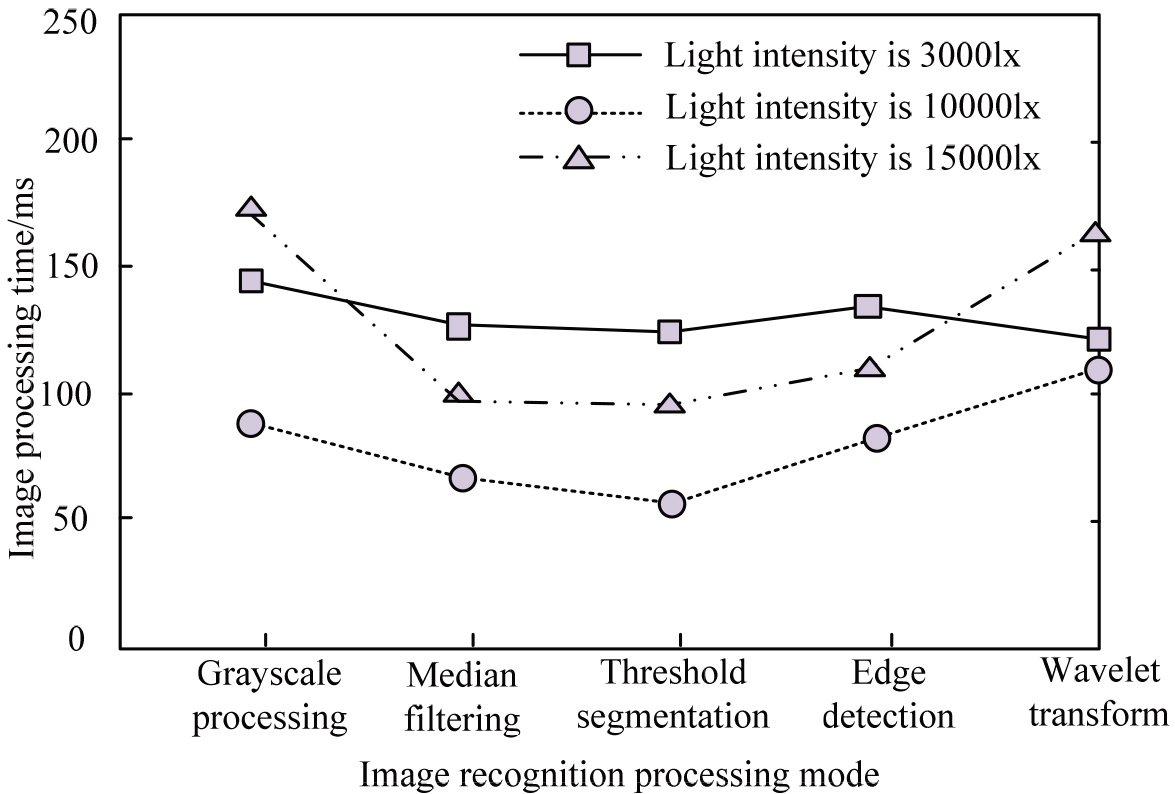
According to the results shown in Fig. 7, when the illumination intensity is different, the processing time of the proposed method for the images collected by CCD camera, such as grayscale processing, segmentation processing, is less than 200 ms, which proves that the proposed method has high processing performance for the image of the robot formation moving environment. The proposed method can accurately identify and track the path of the robot through the images collected. When the light intensity is strong, the robot path tracking control becomes more difficult, but the method in this paper is not affected by the change of light intensity, and has a high level of robot path image recognition.
On this basis, using the method in this paper, three robots were controlled to change from a zigzag arrangement to a zigzag arrangement in a barrier-free environment, and the results are shown in Fig. 8.
Formation switching process of robot formation.
It can be seen from the results shown in Fig. 8 that in the process of transforming the robots from a zigzag arrangement to a zigzag arrangement, the methods presented in this paper can make all three robots find their positions in the new formation without repeated queuing phenomenon. This is mainly because the method in this paper can extract the target features of moving path after collecting the image of robot formation movement scene by machine vision. On this basis, the image of robot formation moving environment is preprocessed, and the initial path information of robot formation is extracted. Then the pilot-follow method is used to control the robot formation, and the potential field method is used to control the robot formation moving path.
On this basis, a static obstacle environment is set, and the path control effect of the proposed method on the robot formation is shown in Fig. 9.
The control effect of the proposed method in static obstacle environment.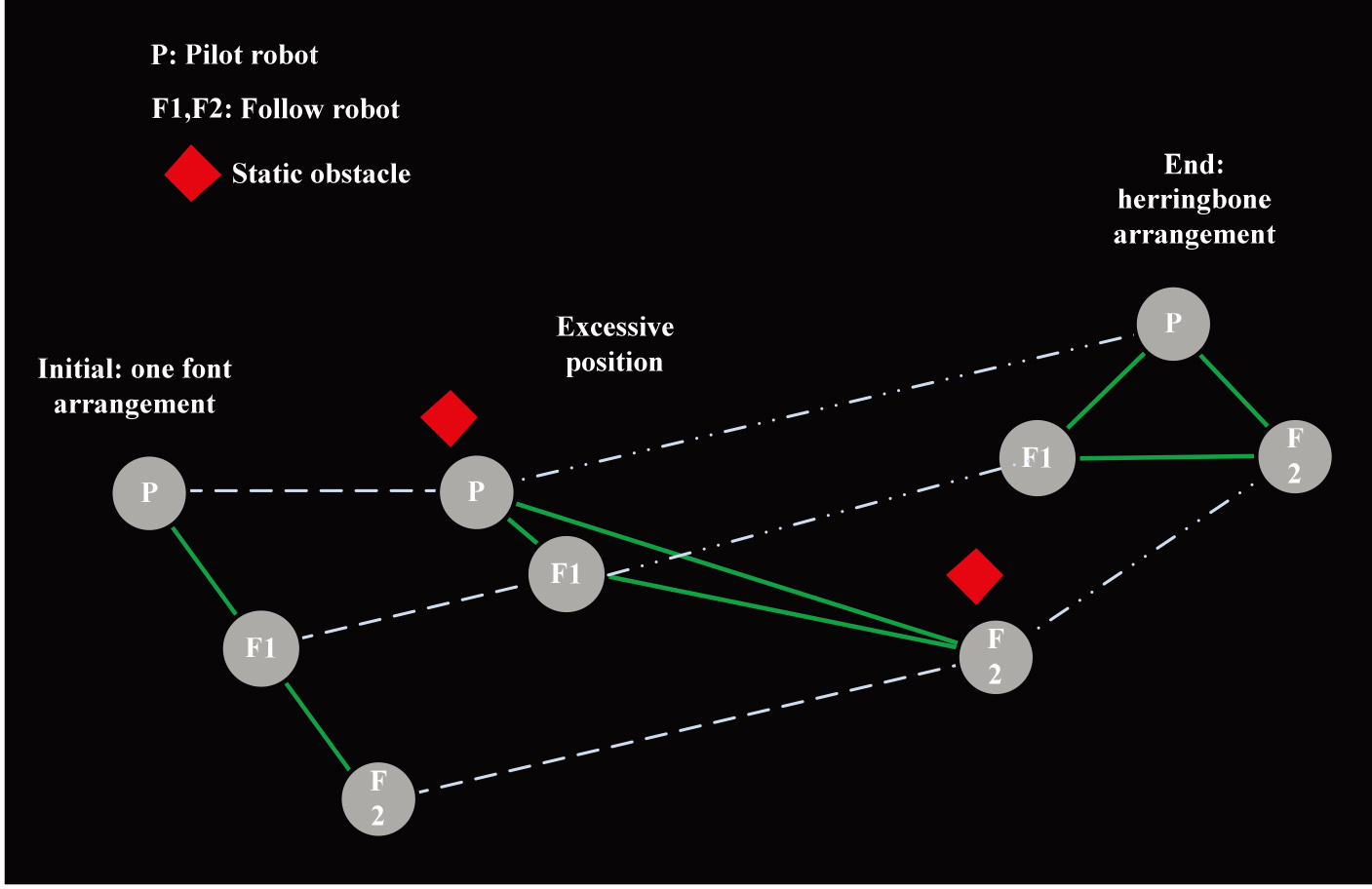
According to the results shown in Fig. 9, in the environment with static obstacles, the pilot robot can still plan a collision-free path, and the two following robots can also reach the target position smoothly from the starting point by constantly following the virtual following robot. This result also fully proves the effectiveness of the proposed method.
In conclusion, after the application of the cooperative control method of robot formation movement path based on machine vision designed in this paper, the processing time of the images collected by CCD camera is less than 200 ms, indicating that this method has high processing performance for the image of robot formation movement environment, and under the control of this method, The robot formation can change formation and intelligently avoid obstacles to reach the target position.
In order to improve the control performance of robot formation, a cooperative control method of robot formation movement path based on machine vision is designed in this paper.
Firstly, an embedded chip control module, an image acquisition module and a communication module are designed to construct a machine vision technology module and extract target features of the robot formation moving path. Then, the formation path information is extracted based on image preprocessing. Based on this, the formation form of virtual structure pilot-following method is used to complete the obstacle avoidance control of robot formation movement path by potential field method. According to the experimental results, the processing time of the image collected by CCD camera is less than 200 ms, indicating that the method has high processing performance for the image of robot formation moving environment. In addition, under the control of this method, the robot formation can change formation and intelligently avoid obstacles to reach the target position.