
Abstract
In order to solve the problem of high false positive rate and false negative rate of mobile robot motion signal anomaly detection, a new method based on deep learning is designed. The abnormal state of mobile robot is analyzed, and the feature of mobile robot running data is extracted by using correlation dimension. The PNN training is completed by adopting the multi-neural network structure of deep learning to deal with the abnormal state sample data of the robot. Based on the motion control method and double evolutionary probability neural network, the abnormal motion signal is detected by fuzzy weighting method and fuzzy matching. Experimental results show that the method can effectively solve the problem of high false alarm rate and false positive rate, and promote the development of robot motion signal anomaly detection technology.
Introduction
Mobile robot is a kind of mobile robot which has some intelligence and can work autonomously or semi-autonomously. It can accomplish the tasks that people have planned for it in advance. It is an important branch of robotics [1]. In the moving process of mobile robot, there will be abnormal conditions, which can be divided into internal component abnormal state (such as sensor failure) and motion abnormal state (such as wheel stuck) [2, 3]. When the internal components are abnormal, the trajectory prediction, positioning and navigation functions of mobile robots will be affected [4]. Although mobile robots have obstacle avoidance system, due to the complexity of the surrounding environment, mobile robots still fail to avoid in time and produce abnormal motion state. This may damage the hardware of the mobile robot, thus endangering the safety of the robot. It can be seen that the identification of abnormal motion states is of great significance to the trajectory prediction, positioning, navigation and robot safety of mobile robots. In order to ensure the normal operation of mobile robots, it is necessary to detect abnormal motion signals of mobile robots in times [5].
Farkh et al. [6] proposed a deep learning controller for wireless following mobile robot based on complex decision strategy. The controller relies on Arduino embedded platform and utilizes multi-layer feedforward network with backpropagation training algorithm to realize offline training by Keras. The deep learning control of wireless following mobile robot is realized on ATmega32 microcontroller. Experimental results show that the proposed method has good control effect, but it cannot detect abnormal motion signals sent by mobile robots in time. Lillo et al. [7] proposed a multi-robot coordination control framework with motion redundancy, embedding tasks into priority motion behavior control, so as to effectively control mobile robots and eliminate redundant motion behaviors. The results of this method prove its effectiveness, but it is still unable to avoid abnormal motion signals of mobile robots.
In order to solve the problems of the above methods, this paper introduces deep learning technology and proposes a mobile robot motion signal abnormal detection method to better solve the problem [8].
Method flow design
In order to achieve the above research objectives, the research process of this study is firstly planned, as shown in Fig. 1.
Flow chart of research.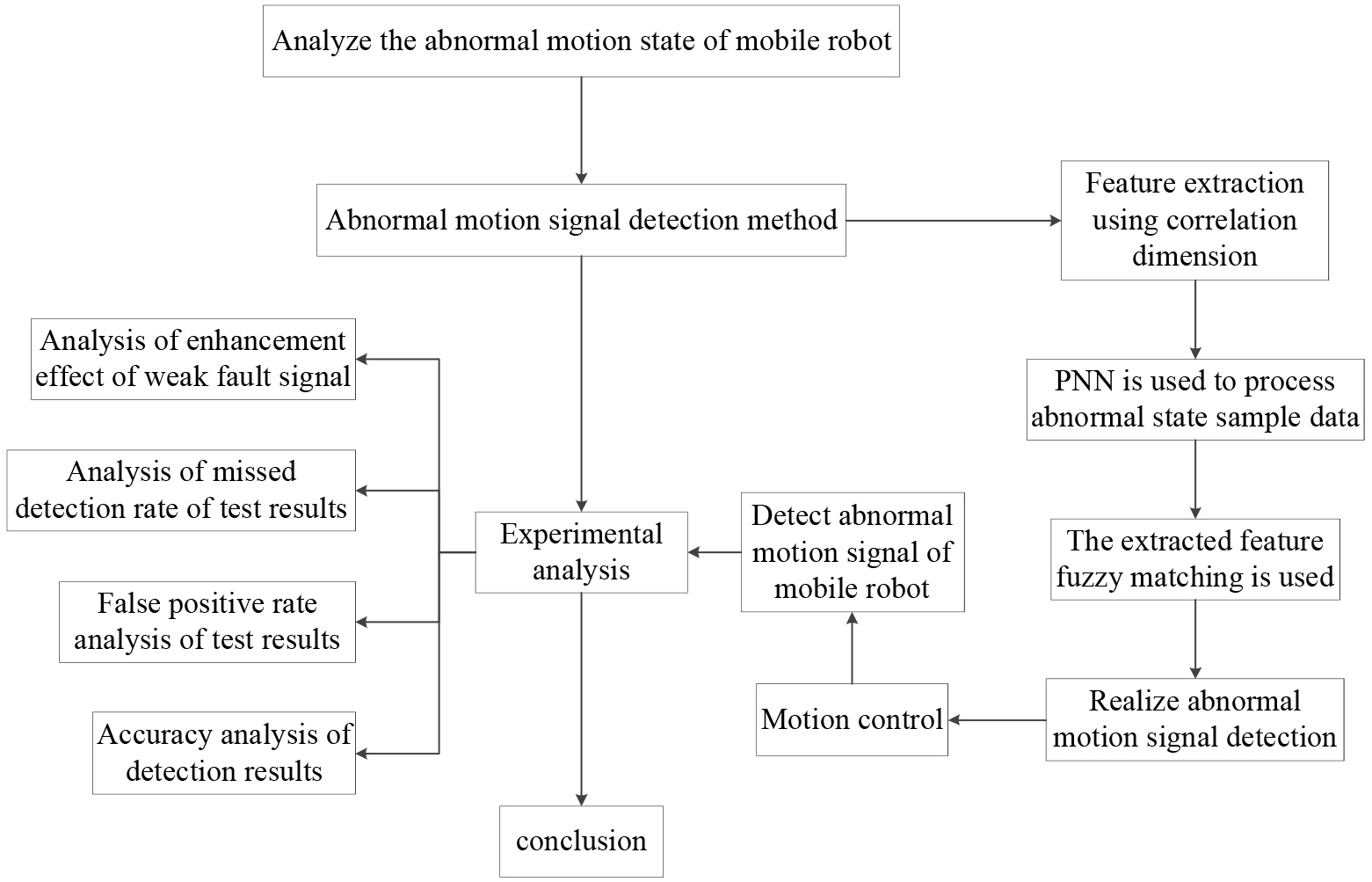
Firstly, a mobile robot with internal sensors and external sensors is studied. The robot adopts an adjustable structure: the 6-wheel structure has good climbing ability, and the 5-wheel structure has good steering ability. Of the two configurations, the first four wheels are all drive wheels, each with a stepper motor and an encoder.
The kinematics model of mobile robot describes the relationship between left and right wheel drive speed and yaw rate. The kinematic model of MORCS-1 can be represented as follows:
Among them,
The kinematic equations are shown in Eq. (2), where
Among them:
The two driving wheels on the same side of the robot are connected by a rocker arm at the same driving speed. That is,
The characteristics of the slip anomaly are that the encoder output (measured velocity) is larger than the actual velocity. The characteristic of the impeded anomaly is that the actual speed of the wheel is smaller than the set speed. The characteristic of the wheel stuck anomaly is that the actual speed of the wheel is almost zero (if the set speed is not zero).
Feature extraction
The weak fault signal can be effectively enhanced by extracting the motion signal features of mobile robot. A set of spatial vectors is obtained by big data phase space reconstruction [12]. The distance between the two vectors is described by the maximum component difference of two vectors, as shown in Eq. (3):
where
Among them: the number of internal points in the constructed phase space is described by
The correlation analysis shows that when the correlation integral
Among them: correlation dimension is represented by
Of which: usually analyze the double logarithm
The standard deviation of mobile robot movement signal data sample points is set. When the standard deviation of data sample is high, the correlation dimension is low. The distribution of motion signals, as shown in Eq. (8):
The approximate coefficient standard deviation of
After extracting the feature of the mobile robot’s motion signal, we need to combine the multi-neural network structure of deep learning to determine the current motion state of the mobile robot. BP network is a kind of multilayer feed-forward neural network trained by error backpropagation algorithm, which is one of the most widely used neural network models. PNN is a neural network model based on statistical principle, and its essence is a parallel algorithm based on Bayesian minimum risk criterion. Unlike traditional multi-layer forward network, PNN requires BP algorithm to calculate the reverse error propagation, but is a completely forward calculation process [13]. The advantages of this method are strong processing ability, long using time and good realizing ability, so it has a wide application prospect.
Multiple neural networks and probabilistic neural networks for left front wheels are shown in Fig. 2. In order to estimate the motion state of each driving wheel efficiently and in parallel, a multi-neural network structure can be adopted. In order to reduce the state space, a probabilistic neural network is designed for each driving wheel, and its motion state is identified according to 3 input features. PN_LF, PN_LR, PN_RF, PN_RR are used for left front wheel, left rear wheel, right front wheel and right rear wheel respectively, and the corresponding input eigenvector is
Multi-neural network structure and left front wheel probabilistic neural network.
The traditional method of feature matching is chain matching, which is time-consuming and computationally complex. This paper presents a new method of feature matching. Therefore, the fuzzy matching method is used to extract the extremum points in the mobile robot running scene to construct membership function, and then the sensors are used to complete the matching between different motion signals.
According to the information obtained by each sensor, the fuzzy weighted method is used to fuse the attributes of the scene, and the scene of the current environment is obtained [14, 15].
Firstly, the fuzzy membership matrix
Because each sensor has different knowledge sources and uncertain effects, the recognition result of the first sensor can be recorded as
Among them:
The calculation process of membership
To solve the membership Comprehensively consider the membership degree of each attribute:
The adjusted fuzzy membership matrix
If
If The general form of the fuzzy production rule is: if If
In the process of fuzzy matching, the membership thresholds
The process of fuzzy matching can be described as follows:
Matching the scene according to the information detected by Get the fuzzy membership matrix Using the influence matrix
According to the above rule, if you get the motion signal that best matches the current perceived environment, turn Step6, otherwise turn Step5; According to the degree of membership is divided into two cases of secondary matching, matching results; Update the access frequency factor of the matched scene, adjust the index order of mobile robot motion signal.
Motion control
(1) Angular velocity control. The desired motion direction of the robot is the angle direction of the maximum value of the expansion graph selected by switching. The angular speed is controlled proportionally and the actual machine is considered. The upper speed limit of the angular speed
(2) Linear speed control. Reference expansion coefficient
The velocity attenuation coefficient
(3) Collision avoidance control. In order to avoid collision caused by response delay in actual system, the product of baseline velocity and collision avoidance coefficient
The coefficient of collision avoidance
The double evolutionary probability neural network is composed of two evolutionary probability neural networks X and Y. Among them, the X network needs few input parameters and is suitable for the motion signals with obvious features, while the Y network needs many input parameters and is used for the motion signals with less obvious features. In the application, we first use the X network identification, and then add the parameters to the Y network identification, which greatly simplifies the identification steps and improves the accuracy and speed. The process of detecting abnormal motion signals of mobile robots by using a dual evolutionary probability neural network is as follows:
Firstly, the mobile robot motion signals needed to be recognized are divided into two parts: the training area and the testing area; Two evolutionary neural networks, X and Y, are constructed. X network mainly identifies the motion signals with obvious features, and Y network is responsible for the motion signals with fuzzy features. X network is trained, and the X network structure is set to 1-8-8-9, which respectively represents one input parameter, eight sampling samples, eight corresponding neuron summation layers and nine output parameters. Here, 0 and 1 are used to indicate whether the parameter belongs to the category, 1 to the category, and 0 to the category. Train the Y network, and set the structure of the Y network to 5-8-8-9, which respectively represents 5 input parameters, 8 sample numbers, 8 corresponding neuron summation layers and 9 output parameters. Here, 0 and 1 are used to indicate whether the parameter belongs to the category, 1 to the category, and 0 to the category. The recognition of the network puts a signal in the test area into the X network or Y network, and the result can be understood as the probability that the signal belongs to the corresponding node, thereby realizing the abnormal detection of the mobile robot’s motion signal.
In order to verify the validity of the mobile robot motion signal anomaly detection method based on deep learning, On the experimental platform of MATLAB R2019B, the dynamic model of mobile robot was constructed to simulate the movement path of mobile robot and randomly set obstacles. In this experimental environment, the motion characteristics of mobile robot motion path tracking are simulated in real time, and the motion signal is abnormal. Establish an experimental data set to collect the data results obtained through the experiment. The experimental data set is designed to provide analysis objects for the experiment, and the data set used in this experiment contains multiple groups and multiple signal anomalies. Abnormal motion signals of mobile robots are detected by using the calculation method in this paper, the deep learning method of mobile robot motion control system in Reference [6] and the kinematic control framework method of multi-robot system based on set in Reference [7]. The three methods are used to enhance the weak fault signals of mobile robots and improve the detection accuracy of abnormal motion signals. The failure rate and false alarm rate obtained by the three methods are compared and analyzed. The specific experimental data settings are shown in Table 1.
Results of understeer experiments (R
1 m, v
0.3 m/s)
Results of understeer experiments (R
Weak fault signal enhancement can effectively improve the efficiency of feature extraction of mobile robot motion signal, and the signal enhancement amplitude between [
Signal enhancement effect.
According to Fig. 3, the weak fault signal enhancement effect of mobile robot based on deep learning is good. In this method, large data is used to reconstruct the spatial scene, and the hidden motion signal is extracted by the correlation dimension, so the characteristic frequency of weak fault signal is enhanced.
In 1 hour, the proportion of the missing number in the motion signal anomaly detection data of the mobile robot is tested to verify the effectiveness of the proposed method. The results are shown in Table 2.
Experimental results of missing report rate
Experimental results of missing report rate
According to Table 2, in the abnormal detection of mobile robot motion signals of different classes, under different anomaly types, the missing rate of the proposed method is lower than 1.40% on the whole, and the minimum missing rate is 0.97% when the mobile robot has no defects. However, under the deep learning method of the motion control system of mobile robot in Reference [6], when the wheel is stuck, the missing rate is the lowest, and the specific value is 2.38%. When the mobile robot has no defect, the missing rate is the highest, and the specific value is 2.91%. According to the kinematic control framework method of multi-robot system based on set in Reference [7], when the mobile robot has no defects, its missing rate is the minimum, and the specific value is 2.57%. When the driving wheel is blocked, the missing rate is the maximum 2.97%. In summary, the method presented in this paper is superior to the two comparison methods in terms of abnormal signal loss, and the application of this method improves the accuracy and timeliness of motion signal anomaly detection.
Random selection of 300 different types of mobile robot motion signal abnormal data as test data. By comparing this method with the methods in References [6, 7], the misinformation rate is tested. The results are shown in Fig. 4.
Result of false positive rate.
According to Fig. 4, under different experimental times, the lowest value of false alarm rate of abnormal motion state detection of mobile robot in this method is about 2%, while the false alarm rate of Reference [6] and Reference [7] are 2.5% and 4% respectively, which are both higher than this method. As the number of experiments is small, the data obtained has a certain degree of contingency, so the more experiments, the more accurate the results. On the whole, the method presented in this paper can keep the false positive rate stably below 4%, but the false positive rate of Reference [6] and Reference [7] reached the highest when the number of experiments was 300, both exceeding 6%. It can be seen that the false positive rate of the proposed method is significantly better than that of References [6, 7]. The reason for this result is that the proposed method uses the deep learning method to construct the fuzzy matrix of multi-neural network structure, which can improve the detection effect of mobile robot motion signal anomaly and reduce the false alarm rate.
Accuracy is the most important index in the field of mobile robot motion signal anomaly detection. It is used to reflect the accuracy of multi-neural network structure. The result is shown in Fig. 5.
Result of accuracy.
According to Fig. 5, under different experimental times, the accuracy of abnormal motion state detection of mobile robot obtained by using this method is the highest among the three methods. The proposed method uses correlation dimensions to extract the motion data features of mobile robots and uses them as the subsequent anomaly detection standard. The accuracy can reach 97%, while the highest accuracy of Reference [6] and Reference [7] are 93% and 95% respectively. Therefore, it can be proved that the accuracy obtained by using the proposed method is significantly higher than the other two methods.
Due to the high false positive rate and false negative rate in the process of abnormal motion signal detection of mobile robot, this paper studies a mobile robot abnormal motion state detection method based on deep learning algorithm. The abnormal motion state of mobile robot is analyzed and then detected; in the detection process, the correlation dimension is firstly used to extract the operating characteristics of the mobile robot, the deep learning multi-neural network structure is used to process the sample data of abnormal state, and the extracted features are used for fuzzy matching, and the abnormal motion signal detection is finally realized. After experimental test, the method for the weak fault signal enhancement effect is better, compared two methods of comparison, the method of overall lower miss rate was 1.40%, the rate of false positives at below 4%, the accuracy can reach 97%, were significantly better than the other two methods, shows that this method can effectively solve the existing problem of mobile robot motion signal anomaly detection. However, due to the limited research time and technical level, this method still has some room for improvement in detection speed. In the future, more in-depth research on this aspect is needed to improve and optimize the method proposed in this paper, which is expected to become the cornerstone of future research on countermeasures of abnormal motion signals of mobile robots.