
Abstract
Aiming at improving the response speed and robustness of wheeled mobile robots, this paper uses neural networks to identify the dynamic functions of mobile robots, and proposes an improved adaptive super-twisting sliding mode controller. First, this paper improves the sliding mode surface of super-twisting sliding mode control, which effectively speeds up the response speed of the system. Second, the robust adaptive law is utilized to eliminate the influence of uncertain parameters in super-twisting sliding mode control, which improves the robustness of the system and greatness reduces the chattering. In addition, the use of a high-gain observer to estimate the speed information of the mobile robot in real time avoids the shortcomings of direct measurement of speed information and realizes the output feedback control of the system.
Keywords
Introduction
As a highly nonlinear complex system, the mobile robot system is a challenging task to realize the wheeled mobile robot to overcome different external disturbances and move according to the predetermined trajectory in different environments. The parameters of its motion control system must always be adjusted with the changes of the tracking path and the surrounding environment in order to satisfy the requirements of precise control.
The traditional PID control method does not possess the ability to adjust the gain parameters online, and has limitations in the tracking control of complex nonlinear systems such as mobile robots. With in-depth research of mobile robots, robust adaptive control methods [1, 2, 3], sliding mode control methods [4, 5, 6, 7], model predictive control methods [8] and intelligent control methods [9, 10, 11] have been applied to the trajectory tracking of mobile robot control. Sliding mode control (SMC) technology is a mature mobile robot control method, which has the advantages of fast response, strong robustness to disturbances and systematic uncertainties, and convenient use. However, this method will produce inevitable chattering phenomenon, which easily affects the control accuracy and may damage the hardware device. Although chattering can be reduced by some means, such as replacing the discrete control function with a saturation function or a sigmoid function [12, 13]. Another way to reduce chattering is used by second-order or higher-order sliding mode controls, such as the super-twisting algorithm [14, 15]. This method ensures that the sliding mode variables and their derivatives can still converge in a limited time under the conditions of disturbance and parameter uncertainty. For example, the literature [6, 16, 17] designed a second-order sliding mode controller based on the super-twisting algorithm for the motion control of mobile robots. Compared with the traditional SMC, it not only reduces the chattering phenomenon, but also maintains the robustness of the controller.
In recent years, neural network control methods [18] have been extensively used in mobile robot control. The addition of neural network enables the control of mobile robot systems to get rid of the dependence of mathematical models, and relieves the linear restriction, which provides a new idea for solving the motion control problem of autonomous mobile robots. Reference [19] used a neural network to compensate for the uncertainty caused by the wheel slip and external force of the mobile robot online, and obtained a better trajectory tracking control effect. Boukens et al. [20] used adaptive neural networks to approximate the system uncertainty and electromechanical dynamics perturbations of mobile robots. In the literature [21], the artificial neural network (ANN) is used to make the mobile robot to obtain the decision-making ability of speed control, so that the mobile robot can still track the target under disturbed conditions.
To achieve the purpose of state feedback of the control system, observers have begun to be applied to the control of mobile robots. In order to deal with the incomplete information of the state vector of the mobile robot under the action of the supertwisting sliding mode controller, the literature [22] uses a high-order sliding mode observer to realize the online estimation of each output state signal of the controller. Reference [23] introduced how high-gain observers in n-order perturbed-integral systems can be implemented in a super-twisting control algorithm. Reference [24] deduces the conditions for the realization of high-gain observers in supervisory control, and compares the sliding-mode observer with the high-gain observer. The simulation results demonstrate that the performance of the two observers is comparable, but the high-gain observer has a simpler structure and easier engineering implementation.
The contributions of this paper are as follows:
An adaptive super-twisting sliding mode controller is designed for the mobile robot, and the sliding mode surface is improved. Thus, the chattering phenomenon of the system is reduced, the convergence speed of the system is accelerated, and the trajectory tracking accuracy of the system is improved. A three-layer BP neural network online adaptive learning system is used to learn the dynamic function A high-gain observer is used to estimate the position and speed signals of mobile robot, which solves the problem that the speed signal of mobile robot is difficult to be measured directly and accurately through the speed sensor, as well as the positioning uncertainty in the process of robot operation. Thus, output feedback control of mobile robot system is realized.
Models of kinematics
This paper picks up the wheeled mobile robot driven by four wheels as the research object. The driving wheel of the robot adopts Mecanum wheel. Compared with the mobile robot with omni-directional wheel, the Mecanum wheel not only can realize the omni-directional movement of the mobile robot, but also gets the advantages of high load-bearing capacity and not easy to wear the roller.
As shown in Fig. 1, point
Structure diagram of the Mecanum wheel mobile robot.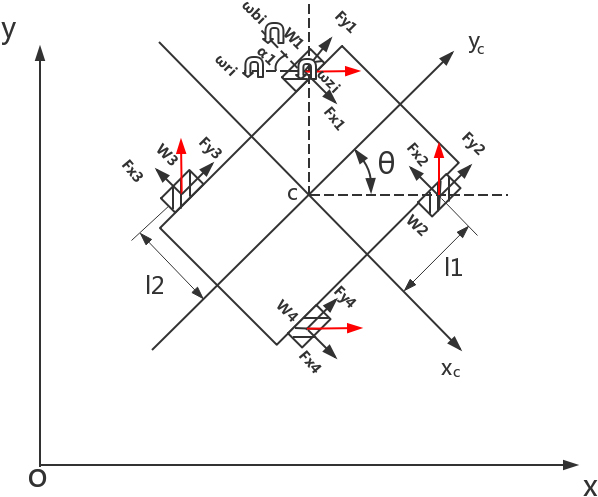
The motion of the mobile robot platform is decomposed into three independent variables to describe.
According to Eq. (2), the motion state of the mobile robot platform is determined by the motion components of four wheels, but there is only one external input in practice. Therefore, it is necessary to continue to simplify the above model into the relationship between the angular velocity of each wheel of the mobile robot and the motion state of the platform. By substituting Eq. (2) corresponding to each wheel, the corresponding Jacobian matrix of each wheel can be obtained.
It can be seen from Eqs (2) and (2.1) that the relationship between the motion vector of the mobile robot and the external input is
The inverse kinematics formula is
Here,
Finally, it is converted to the world coordinate system to obtain the kinematic model of the autonomous mobile robot in the absolute coordinate system, as follows:
At present, most of the controllers developed for mobile robots are based on kinematic models, but the dynamic models can more truly reflect the motion behavior of robots, so the trajectory tracking control of mobile robots based on the dynamics is of more research value. The force controller is based on a dynamic model that highly depends on the parameters of the robot, such as the mass, friction, inertia matrix, driving torque and so on. The dynamic model of wheeled mobile robot including actuator, is as follows:
where
If
where
Design of high gain observer
In practical application, it is difficult to directly and accurately obtain the speed signal of mobile robot with ordinary speed sensor, while the high-precision speed sensor is expensive, and the wheel slides relative to the ground, which makes the autonomous mobile robot still have the problem of positioning uncertainty. Therefore, a high gain observer is designed to estimate the pose and velocity signals from the mobile robot. Based on the separation principle, the observer and controller are designed, respectively.
The observer error is defined as
In a particular case
Taking
where
The trajectory tracking problem of mobile robot is the convergence problem of target tracking. That is, to design an appropriate control strategy to make the mobile robot approach the target point gradually driven by the control output. Therefore, assuming that the desired pose is
The control goal of this paper is to find a control law
In order to design a super-twisting algorithm for trajectory tracking problem, the sliding surface is defined as [29]
where
Because the velocity signal of the mobile robot is difficult to be measured directly and accurately, the velocity estimation value obtained by high gain observer is used instead. Therefore,
Derive Eq. (12) and substitute Eq. (11) into it.
To design the sliding mode control system, we first need to give the dynamic equivalent control law
Simultaneous Eqs (14) and (15) can be obtained.
where
In order to solve the chattering problem in the control, it is necessary to introduce the discontinuous term
Where
However, in the actual application of mobile robot platform, the disturbance term
where
The results show that the power approach law can effectively accelerate the convergence speed of the control system. In order to improve the response speed of the mobile robot system and make the system have better motion quality, the sliding surface Eq. (13) is improved in this paper. The improved sliding surface is called double power sliding surface. The formula is as follows:
where
It is worth noting that parameter uncertainty will worsen the control effect of the mobile robot [26]. In the sliding mode surface given by Eq. (20), parameter
The designed robust adaptive control law is as follows:
where
Therefore, the improved control law can be obtained as:
In realistic applications, there are uncertainties and external disturbances in the dynamics of mobile robots, such as mechanical parameter changes, external load disturbances and unstructured uncertainties. Therefore, the dynamic function
In this paper, sigmoid function is used as the membership function of a neural network, and its expression is as follows:
Using function approximation property of neural network, the dynamic function
where
For the ideal value of neural network weight, there is an approximate neural network weight. Therefore, an estimate can be given for the purpose of practical control.
Where
The adaptive weight of the neural network here is obtained by the gradient estimation algorithm [27]. Based on the back propagation error, which is taken as:
where
where
So far, the final trajectory tracking controller of mobile robot can be obtained as:
To verify the effectiveness and superiority of the improved algorithm in this paper, the four-wheel independent driving mobile robot platform represented by Eqs (6) and (8) is simulated and verified. The neural network-based adaptive super-twisting sliding mode control method under the action of high gain observer (NNASTSMC-HGO) proposed in this paper is simulated and compared with the super-twisting sliding mode control method under the action of high-order sliding mode observer (STSMC-HOSMO) proposed in reference [22].
For simulation purposes, the interference item is set to
The number of hidden layer units of a neural network is
Related simulation parameter table of control algorithm
Control system structure diagram.
To verify the strong robustness of the control method proposed in this paper, three different desired trajectories are tracked: circular trajectory (Fig. 3), 8 desired trajectory (Fig. 4) and square trajectory (Fig. 5).
Set the desired circular tracking trajectory of the mobile robot as:
Circular trajectory tracking.
8-shaped trajectory tracking.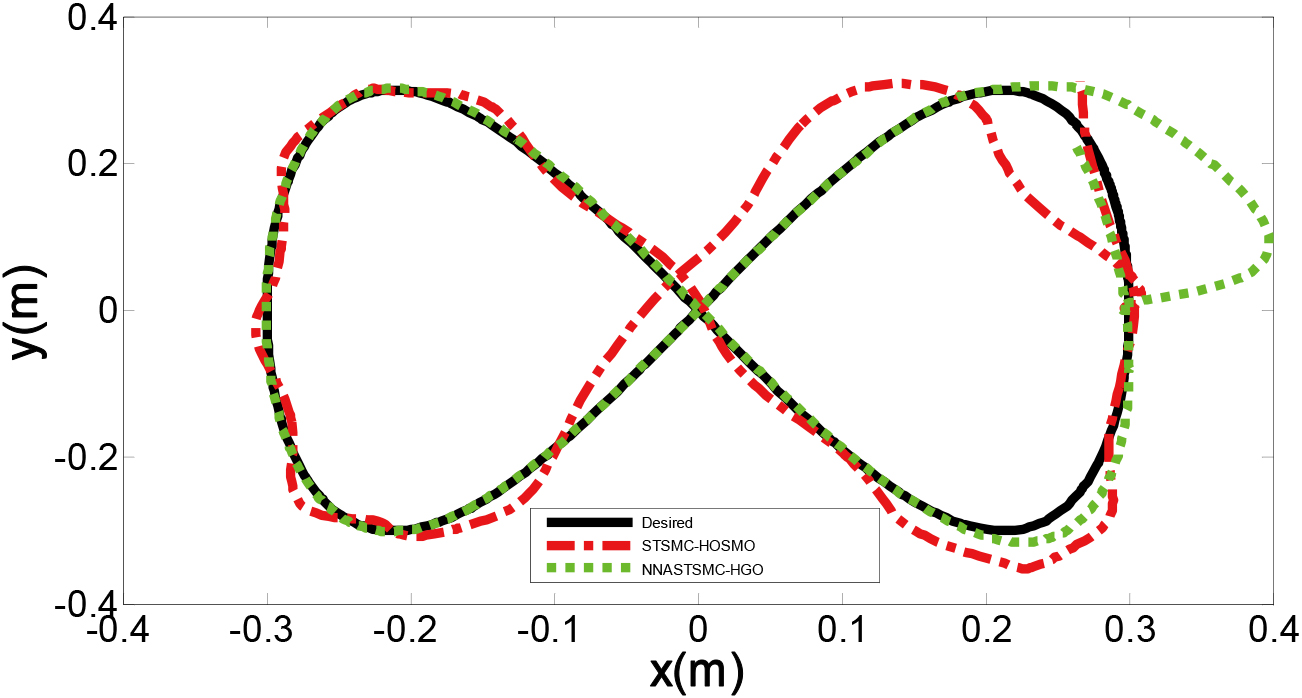
Rectangular trajectory tracking.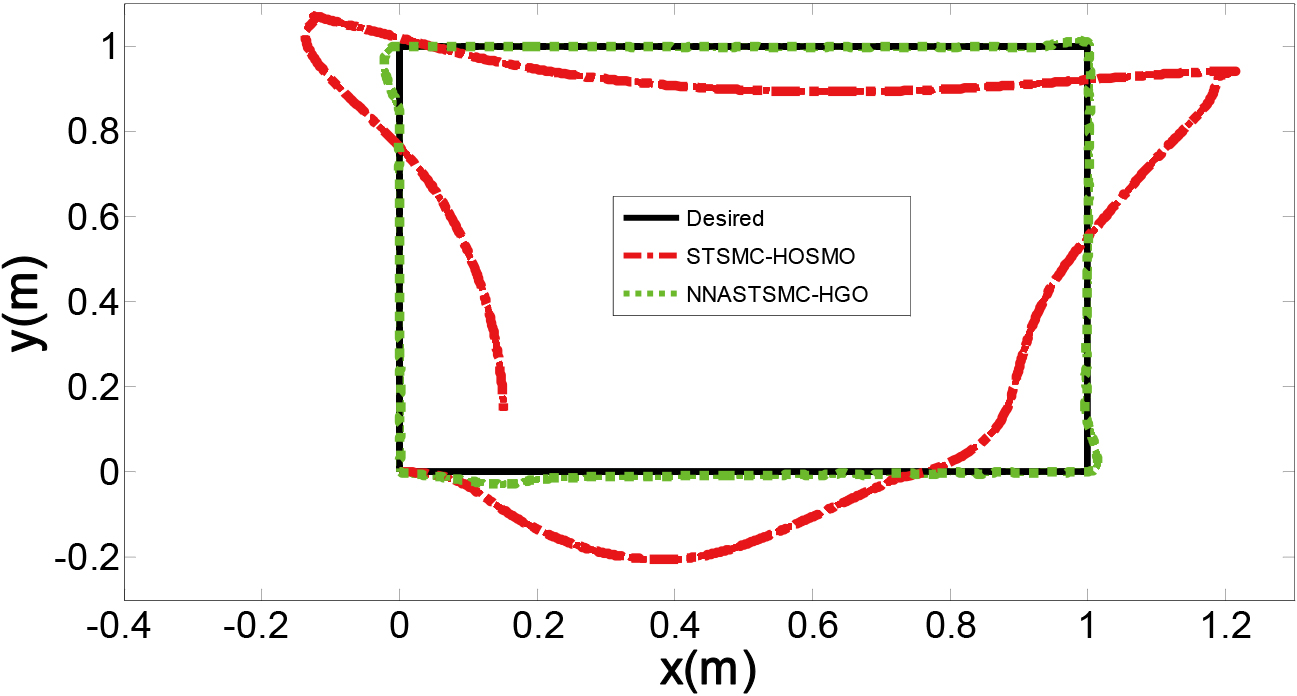
where
Set the Fig. 8 desired tracking trajectory of the mobile robot as:
where
Set the desired square tracking trajectory of the mobile robot as:
It can be clearly seen from the three simulation diagrams that the NNASTSMC-HGO method proposed in this paper has the best control effect in terms of response speed, tracking accuracy and robustness. Due to the lack of on-line parameter adjustment ability, STSMC-HOSMO method only has good tracking effect when tracking a circular trajectory, but it has poor tracking effect on the other two expected trajectories, and even deviates from the reference trajectory.
The circular reference track will need to be further analysed below. From the simulation results of Figs 3, 6 and 7, it can be observed that these two control methods can effectively realize the circular trajectory tracking task of the mobile robot. However, relatively speaking, the tracking error of STSMC-HOSMO control method is 10
Trajectory tracking error graph.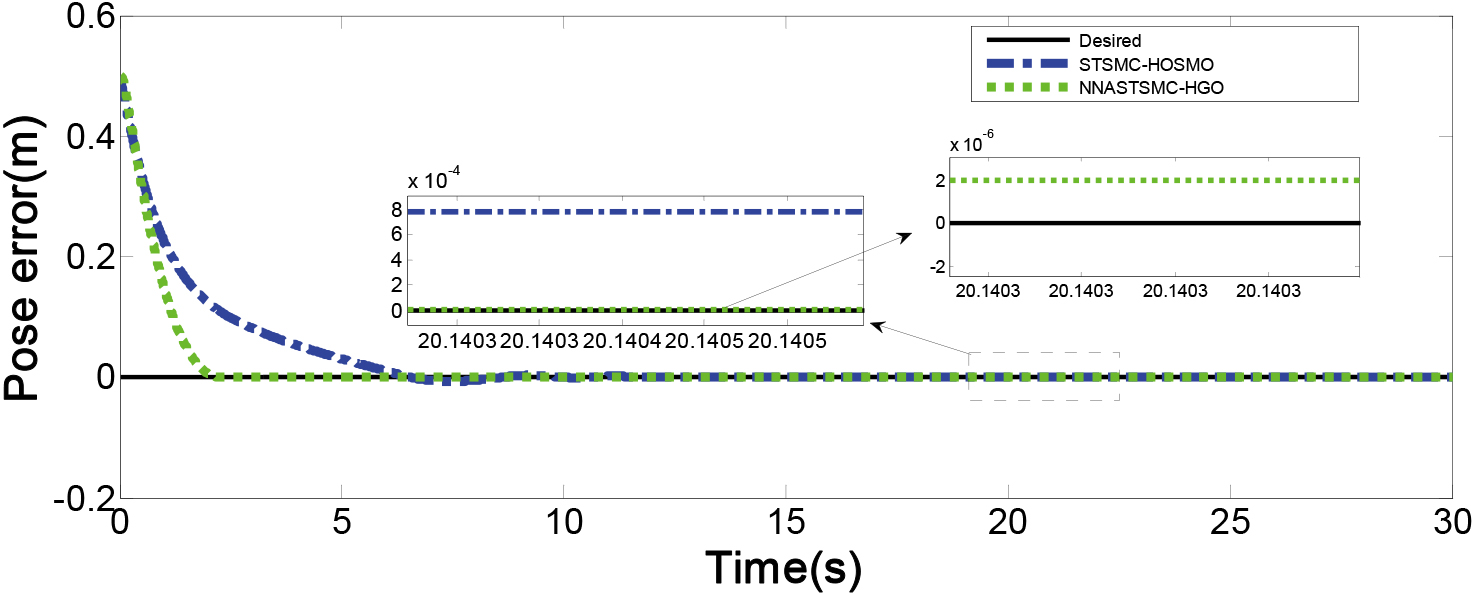
The sliding surface of reference [20] and the improved slide surface ratio of this paper.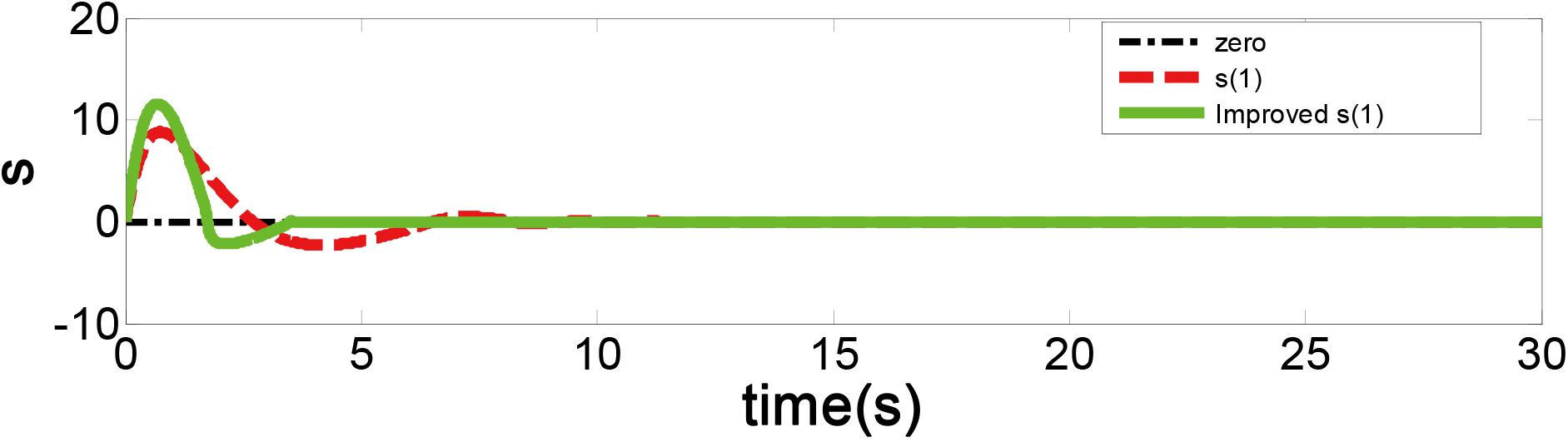
Effect diagram of adjusting sliding mode parameter ci with adaptive law.
Input torque.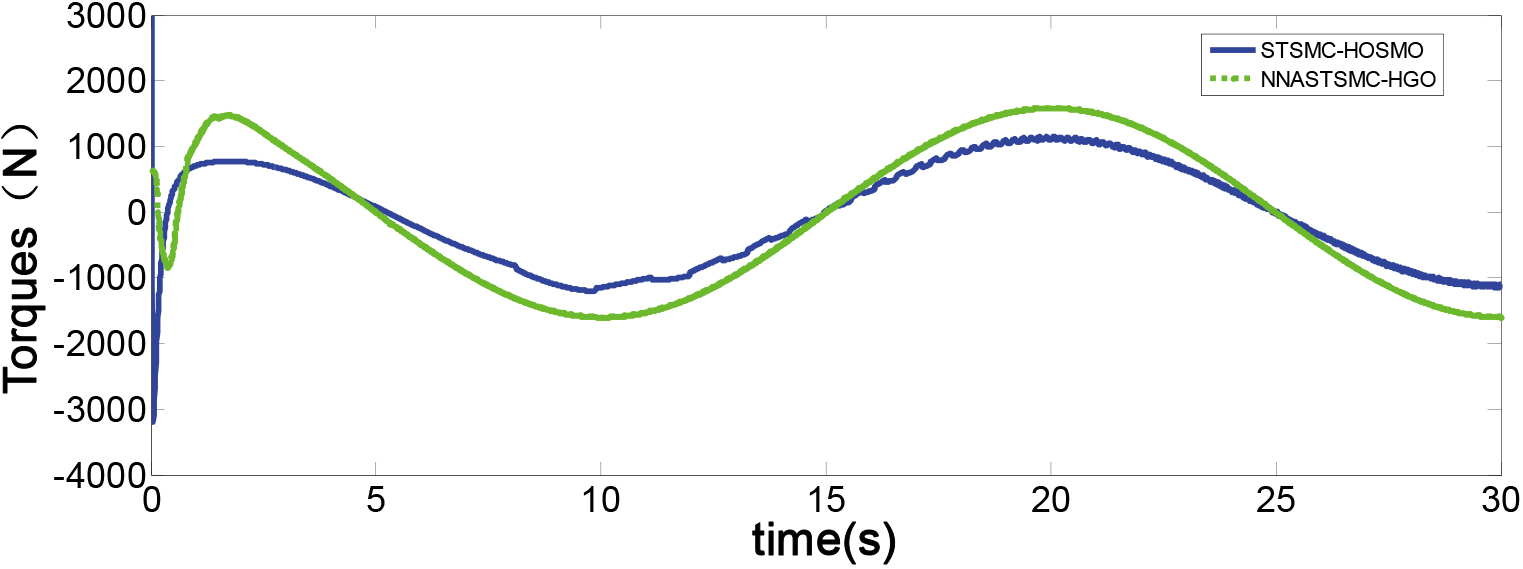
Figure 8 shows the variation law of sliding mode parameter adjusted online by robust adaptive law. The results show that the designed adaptive control law can effectively estimate the value of parameters in real time, and the uncertain parameter can finally converge to a certain value in a bounded manner. Figure 9 displays the input torque diagram of the control system. It can be observed that the change of input torque is relatively stable and smooth, preventing the damage of buffeting on the system hardware.
Pose estimation of high gain observer.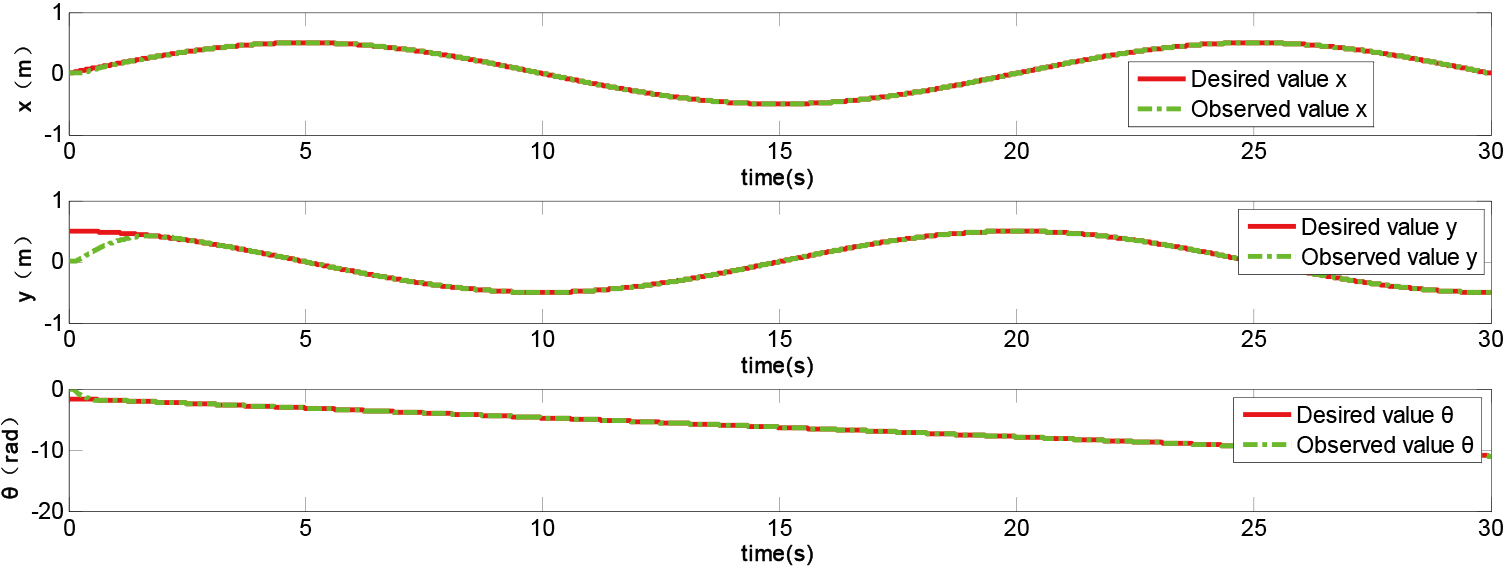
Speed estimation of high gain observe.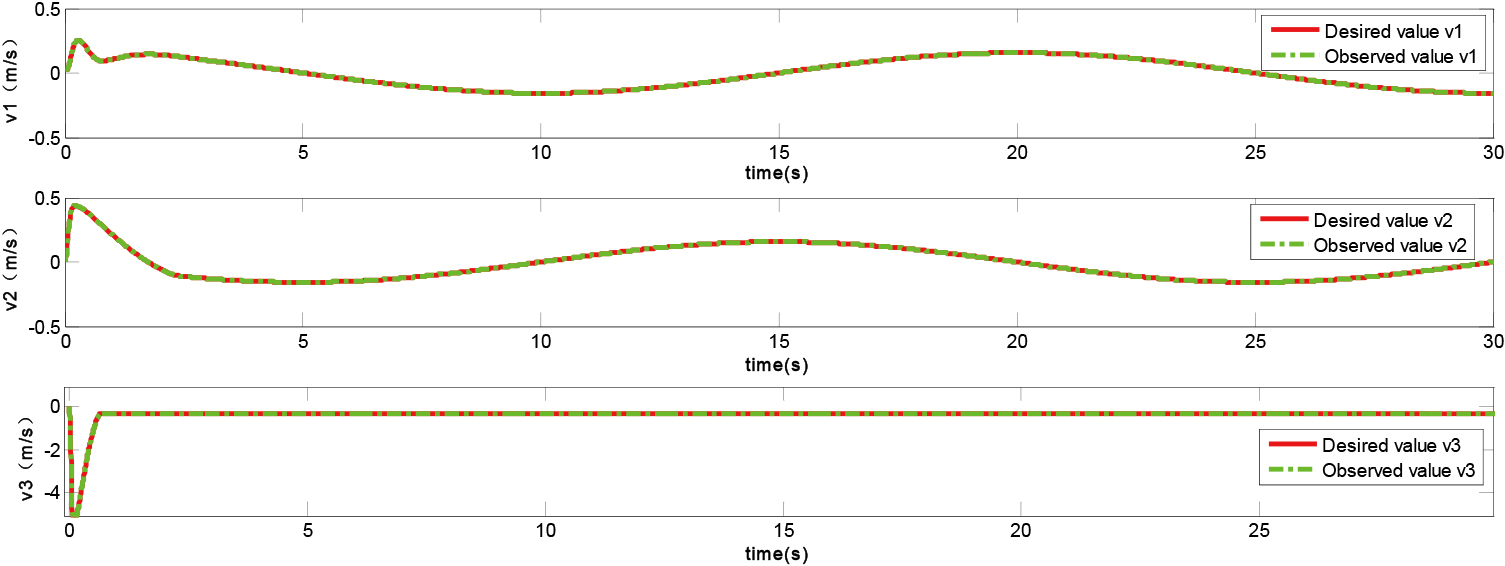
Figures 1 and 11, respectively, show the comparison results of expected and estimated values of pose and speed of mobile robot under the action of high gain observer. From the estimation effect, the designed high gain observer can quickly and accurately estimate the position, attitude and speed state signals of the system, make up for the positioning uncertainty of the autonomous mobile robot to a certain extent, make up for the influence of the measurement error of the speed sensor on the control accuracy of the system, and ensure the fast response of the trajectory tracking controller of the mobile robot. The output feedback control of the system is realized.
In this paper, an adaptive hypertwist sliding mode trajectory tracking controller for wheeled mobile robot based on neural network identification of dynamic function is designed. Its advantage is that the robot system can still have faster convergence speed, stronger robustness and higher tracking accuracy without fully knowing the dynamic function. It meets the requirements of rapid response and accurate control of mobile robots. In addition, the use of high gain observer realizes the output feedback control of the control system, improves the engineering feasibility of a mobile robot and reduces the user cost. The simulation proves that the control algorithm designed in this paper is feasible, which provides a theoretical basis for the construction of the next physical experiment platform. The next research work will verify the effectiveness of the algorithm on the physical platform of the mobile robot and further improve the control algorithm.
Footnotes
Acknowledgments
2021 Teaching Quality and Teaching Reform Project of Undergraduate Colleges and Universities in Guangdong Province (Yue Jiao Gao Han [2021] No. 29)
Dongguan Science and Technology of Social Development Program (No. 20211800905482)
Dongguan Sci-Tech Commissioner Program (No. 20201800500592; No. 20201800500622)
Project of Characteristic Innovation of Guangdong Province (No. 2021KTSCX148)
College Student Innovation and Entrepreneurship Training Program of Guangdong University of Science and Technology (No. 202113719002; No. 202113719005)