
Abstract
A signal enhancement method of vehicle wireless sensor network (WSN) based on adaptive filter is designed in this paper. By analyzing the vehicle WSN structure and node deployment mode, the signal operation process of WSN in the vehicle is determined, the relationship between Received Signal Strength Indication (RSSI) and distance is analyzed, and the signal of vehicle WSN is acquired. In order to reduce the workload of signal enhancement, set the signal strength judgment conditions of vehicle WSN, among the collected signals, the signal with poor intensity is taken as the research object. On this basis, the adaptive filter is used to remove the signal noise of vehicle WSN and enhance the signal strength. The signal enhanced by the proposed method has less noise and good stability.
Introduction
While cars bring great convenience to human beings, they also bring problems such as traffic safety, traffic congestion and environmental pollution. Due to the frequent occurrence of automobile accidents, road traffic safety has also become a global issue [1]. According to statistics, the number of car accident deaths reaches about 1.2 million per year, millions of people are injured or disabled, and the economic losses caused by traffic accidents are high every year [2]. The traffic safety situation in China is more severe, with the number of deaths caused by road traffic accidents ranking second in the world [3]. It can be seen that improving vehicle safety performance and reducing road traffic accidents are still social problems of general concern and important challenges faced by scientific and technological workers in both developed and developing countries.
In order to ensure the safe driving of vehicles, the signal enhancement of wireless sensor networks has become a key research field. Wireless sensor network involves many subjects and the knowledge is highly integrated. Wireless sensor networks do not need fixed infrastructure support, easy to deploy quickly, good fault tolerance, strong survivability. It has been widely used in military reconnaissance, environmental monitoring, medical monitoring, industrial monitoring, space exploration and other fields [4]. By arranging a large number of integrated microsensor nodes in the monitoring area, WSN collaboratively monitors, senses and collects information of various environments or monitored objects in real time, thus realizing comprehensive processing of information in the network and transmitting the processed information to users [5]. As more and more researchers begin to pay attention to wireless sensor networks in vehicle testing environment, many challenging topics have been proposed, and signal enhancement in vehicle wireless sensor networks is one of them, and relevant researchers have achieved considerable research results.
Musluoglu and Bertrand [6] study the distributed adaptive tracking than the wireless sensor network (WSN), focused on the connection network, ensure that each node can communicate with each other directly, sharing only a compressed signal observed value, in order to reduce the communication cost, the optimization algorithm after validation of convergence, makes it better in wireless sensor networks. This method verifies the theoretical knowledge, and makes the corresponding supplement, but the use environment of this method has certain limitations, and it is difficult to be widely applied. Lu et al. [7] aimed at the problems of abnormal data collected by nodes caused by low security of sensors, bad detection area and resource constraints in WSN, a WSN abnormal node detection algorithm based on graph signal processing is proposed. The signal model of k-nearest neighbor (KNN) graph is established according to the position characteristics of the sensor. A statistical test is constructed based on the ratio of the smoothness of the graph signal before and after low-pass filtering. The existence of abnormal nodes is judged by statistical test quantity and decision threshold. This method can accurately detect abnormal nodes, but it is difficult to avoid noise interference in the process, resulting in poor stability of the detection process. He et al. [8] aimed at the problems of large cluster head selection overhead in hierarchical WSN, cluster heads close to sink nodes are easy to be overloaded, and routing needs multiple hops to reach sink, resulting in large delay, a routing protocol fully considering cluster head load balancing is proposed. Multi sink nodes are used to build the network, the received signal strength indication is used to cluster the network gradient, and the mobile sensor node is used to forward data between the cluster head and sink. The above scheme can effectively balance the cluster head load in WSN. However, the protocol setting process of this method is complex, and the signal enhancement efficiency is low.
In order to improve the signal strength of vehicle wireless sensor network and avoid the problems in previous research results, a new vehicle WSN signal enhancement based on adaptive filter is designed to improve the signal strength and ensure the safety of vehicle travel.
Signal enhancement of vehicle WSN based on adaptive filter
Vehicle WSN structure and node deployment mode
In order to improve the effectiveness of WSN signal enhancement in vehicles, firstly, the vehicle WSN structure and node deployment mode are analyzed. WSN systems usually include management nodes directly controlled by users, sensor nodes and sink nodes used to connect sensor nodes and control centers [9]. Sink nodes are sometimes called sink nodes or gateway nodes. In the communication area, there are numerous sensor nodes with detection function. These nodes are immediately distributed in or around the whole observation area and form a network through self-organization. The sensor nodes preliminarily process the detected information and the information transmitted from other nodes, transmit it to the sink node via multi hop routing, and finally through the Internet satellite and mobile communication network reach the management node. Users directly control the management node to receive and manage data and issue instructions [10].
Sensor node communication is usually a micro embedded system with limited data processing capacity, low data storage and short communication distance. It can obtain energy power by carrying batteries with limited energy or by solar energy and vibration energy [11]. Sensor node is not only a network terminal, but also has the function of a router. Each sensor node can sense and collect surrounding data through its own sensor module, and can receive, store, manage and integrate the information transmitted by peripheral nodes, forming a network with other nodes to fulfill a task. The processing capacity, storage capacity and communication capacity of the sink node are stronger than those of the sensor node. It is used as a transfer device between the sensor node and the external network. It can not only realize the conversion of network communication protocols between the two protocol stacks, but also convey the detection tasks from the management node to the sensor node. The sink node can be either a sensor node with enhanced function or a special gateway device with only information transmission function. The structure of vehicle WSN is shown in Fig. 1.
Vehicle WSN structure.
Based on the analysis of vehicle WSN structure, determining the deployment mode of the wireless sensor communication node in the perpendicular is the key step to enhance the signal. Therefore, this paper studies the deployment of wireless sensor communication nodes in vehicles. In order to complete the signal enhancement to the vehicle wireless sensor network, the wireless sensor network needs to be arranged first. In the research process of this paper, the wireless sensor network is arranged in the environment around the vehicle, with the traffic environment of the parking lot as the background, the sensor nodes are deployed, and the network nodes are used as the base point to realize the positioning of the vehicle driving process, and then complete the identification of the vehicle. Enhancement of vehicle wireless sensor network signals.
For vertical and oblique parking spaces, there are two effective deployment methods without increasing the number of sensor nodes: one is in the center of the parking space, and the other is in the middle line of two adjacent parking spaces. For parallel parking spaces, to enhance the detection accuracy, it can be considered to deploy two sensor nodes for each parking space [12].
Within the network signal deployment mode, the magnetic field change between the arrival and departure of the vehicle is related to the motion track and speed of the vehicle when parking. The motion track of the vehicle is mainly related to the parking space layout and the driver’s behavior. There are three common parking spaces: parallel, oblique and vertical.
(1) Parallel parking refers to the arrangement of parking spaces parallel to the carriageway, and the number of parking spaces set per unit length is small.
The time required for vehicles to enter or leave the parallel parking space is longer than the other two types of parking space below, and the adjacent vehicles are in a more disturbing position less, but dynamic vehicle interference is large.
(2) Oblique parking means that the parking spaces are arranged at a certain angle with the carriageway. The common parking angles are 30 degrees, 45 degrees, and 60 degrees. The time required for vehicles to enter or leave the inclined parking space is short, and the number of parking spaces set on the unit road length is more than that of the parallel parking space, and the magnetic signal is most disturbed by the parking of adjacent parking spaces.
(3) Vertical parking refers to the arrangement of parking spaces perpendicular to the traffic lane, that is, the parking angle is 90 degrees. Vertical parking has the largest parking space capacity and is easy to be disturbed by the parking of adjacent parking spaces. Users with different driving proficiency adjust their vehicle tracks back and forth in the parking space. Generally, it takes more time for the vehicle to drive in and stop than it takes for the vehicle to leave.
The above-mentioned parking methods are instructions made through the identification of the external environment by the WSN signals in the vehicle. The deployment form of its nodes is very key, which affects the results executed in the vehicle operation.
Based on the above research on the structure analysis of vehicle WSN and the deployment mode of signal nodes, it is necessary to collect the internal signals and enhance the signals of different strengths to varying degrees so as to enhance the signal enhancement effect. Therefore, this chapter mainly studies the signal acquisition of vehicle WSN. In this paper, the signal acquisition is completed based on the relationship between Received Signal Strength Indication (RSSI) and distance. WSN signals are generally divided into two stages: offline stage and online stage. In the off-line stage, the area to be located is investigated, and the scene feature information is collected at the sampling point, such as collecting the signal strength of the reference node and establishing a database for it. In the online phase, the scene feature information is obtained through real-time measurement, and the position of the signal node to be strengthened is estimated according to the prior knowledge in the offline phase.
RSSI is defined as an indication of the signal strength received by the receiver. Generally, RSSI is equivalent to the measured power, that is, the square of the signal strength. RSSI can be considered as ultrasonic, Radio Frequency (RF) or other signals. RSSI measurement is quite cheap and simple in hardware, because almost all wireless communication devices have the function of measuring RSSI.
The relationship between the transmitting power and receiving power of WSN signal in the vehicle can be expressed by Eq. (1):
where
Taking logarithms on both sides of Eq. (1) yields Eq. (2):
The transmission power of the node is known. If the transmission power is substituted into Eq. (2), Eq. (3) can be obtained:
In the right half of Eq. (3),
Here, the values of the constants
After determining the relationship between RSSI and distance, the wireless chip CC2430 is used as the wireless communication sending and receiving node in the vehicle environment, the height of the node placement is 80 cm, the default power of the transmitting node is set to the maximum of 0 dBm (lmw), and the node spacing is 1 meter, test 100 times and get the average
RSSI and distance variation curve.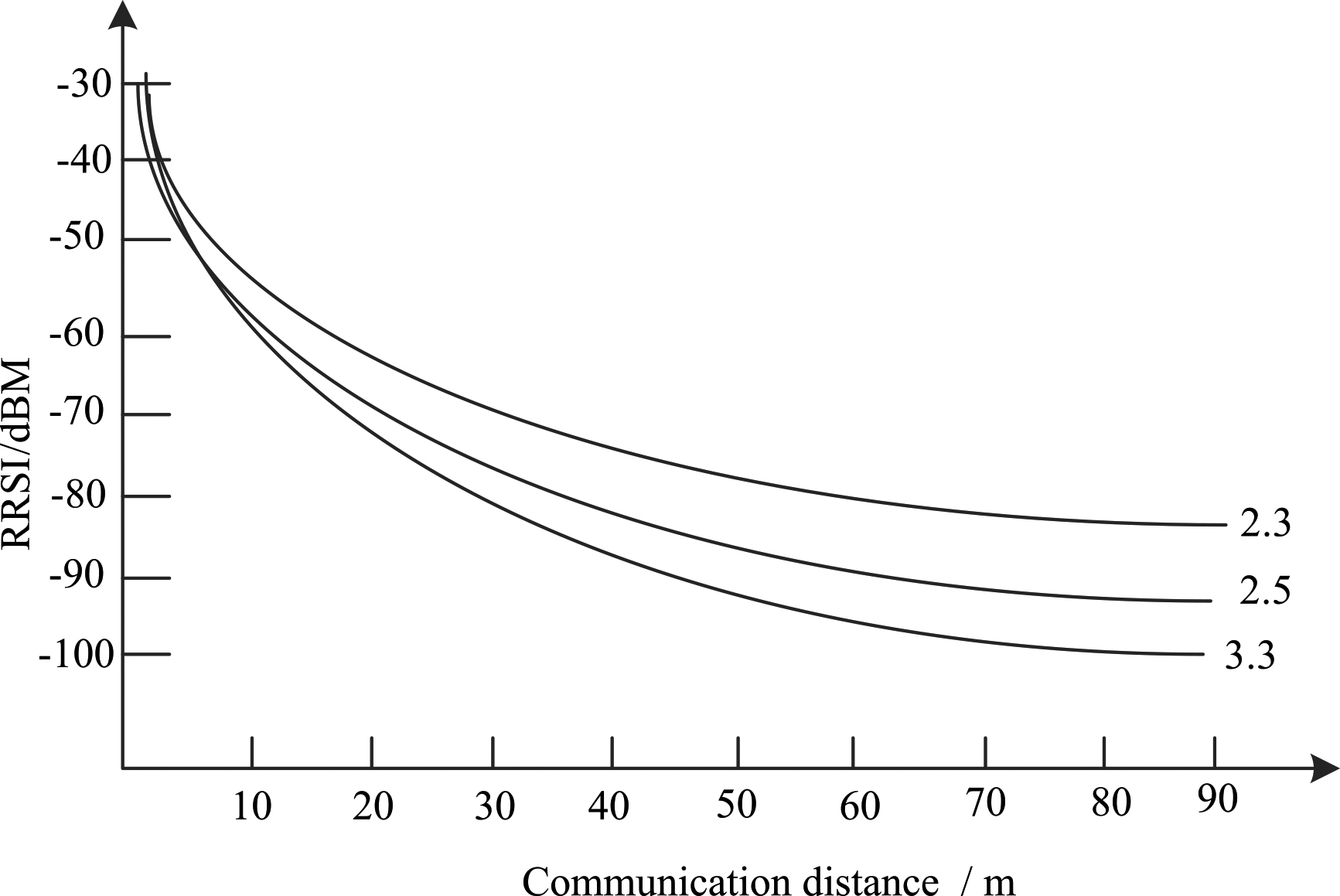
Based on the analysis, complete the wireless network signal acquisition.
According to the above collected vehicle WSN signals, the vehicle WSN signal strength determination conditions are set, the collected signals are screened, the signals that are obviously strong are eliminated, and the signals with poor signal strength are analyzed emphatically. At this time, it is necessary to determine the strength of the signal by calculating the communication capability of the vehicle WSN signal. Normally, the energy consumption e of the wireless sensor node and the communication distance d corresponds to the following relation:
Among,
For any vehicle WSN signal
The energy consumption of vehicle WSN signal nodes will increase sharply with the communication distance. On the premise of meeting the communication connectivity, reducing the distance of a single hop will prolong the communication times of sensor nodes in the network, so as to extend its service life. Generally speaking, it is more appropriate to set the communication radius of the network within 100 meters. Sensor networks adopt multi hop routing to balance the contradiction between their own energy limit and large monitoring area. Limited by the changes of the external natural environment and its own energy, the communication performance of sensor networks often changes, which often occurs in the process of network communication. Therefore, it is necessary to effectively preprocess the noise.
Unlike noise, signal can be described by a definite time function, which is a big difference. Therefore, the law of the signal itself (i.e. correlation) can be used to detect the signal. Let the observation data satisfy Eq. (7), and define its autocorrelation function as:
where
The condition that the second equality above holds is that the Gaussian white noise samples
When the target
At present, the widely used adaptive Kalman filters are adaptive extended Kalman filter (AEKF) and adaptive unscented Kalman filter (AUKF). Firstly, the extended Kalman filter estimates and updates the state of the system through iterations of state prediction and state correction. Then, the noise statistical estimator senses the statistical characteristics of the noise online and corrects the statistical parameters of the noise.
The state prediction equation is:
where
Basic structure of adaptive filter.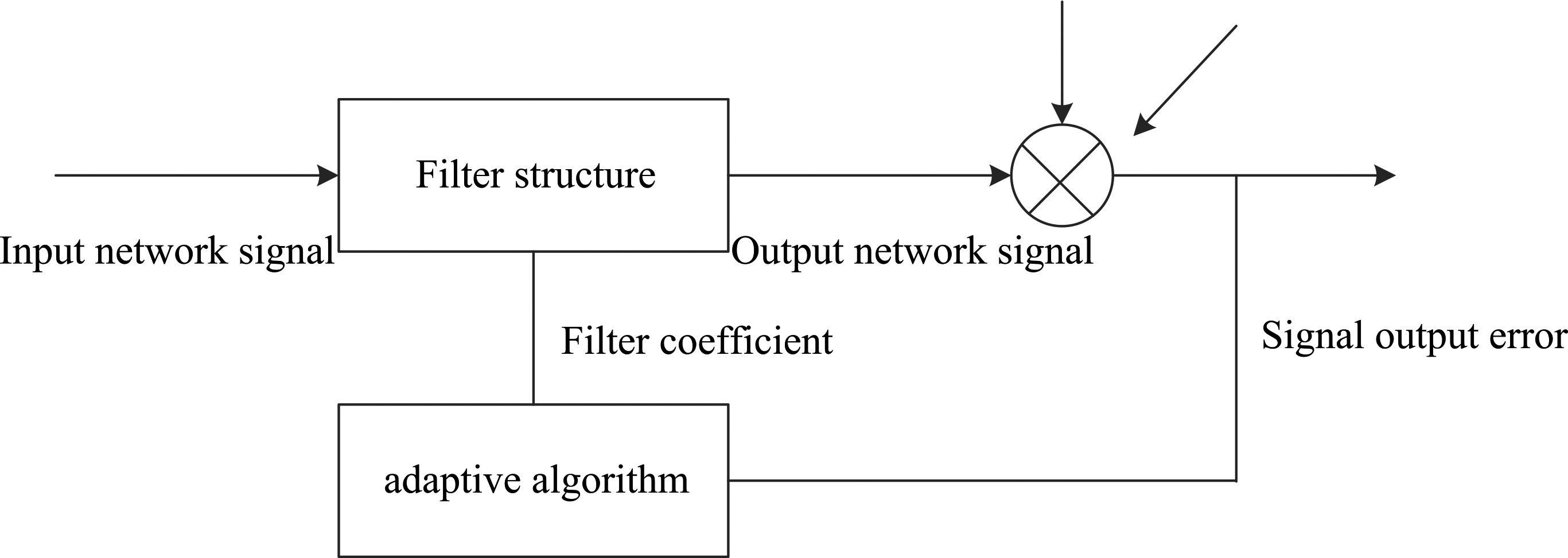
In this paper, the adaptive filter is used for signal enhancement in vehicle WSN. The specific enhancement process is described:
Step 1: initialize the vehicle WSN signal to be enhanced to obtain:
Step 2: where
Step 3: sigma point calculation, the calculation equation is:
where
Step 4: calibrate the signal strength parameters of vehicle WSN.
The effectiveness of vehicle WSN signal strength parameters is calibrated by having different network topology shapes and node placement methods.
They are square and
Where
Step 5: the adaptive Kalman filter is used to denoise the signal.
Since the above determined signal strength parameters of vehicle WSN can not fully ensure that the parameters can be removed, further processing is required. At this time, the noise is directly removed by adaptive Kalman filter to ensure the effectiveness of the enhanced signal. The processing equation is:
where
Further function conversion is carried out to reduce the complexity of noise reduction, and the following results are obtained:
where
On this basis, the error value in the denoised network signal is reduced, and the multi-dimensional calibration algorithm is used to calculate the average relative error, and the following results are obtained:
where
Step 6: determine the blind source signal of the signal in the vehicle WSN. In this step, it is necessary to assume that the source signal is not aliased in time-frequency domain, that is, only one source signal plays a leading role in any time-frequency neighborhood, which is difficult to meet in practice. The underdetermined blind separation algorithm based on subspace projection relaxes the requirement of source signal sparsity. It can complete the source signal separation only by assuming that the number of simultaneous source signals in any time-frequency neighborhood is less than the number of array elements. Compared with the underdetermined blind separation algorithm based on time-frequency sparsity, the underdetermined blind separation algorithm proposed in this work also relaxes the sparsity requirements of the source signal. It is assumed that the number of source signals existing simultaneously in any time-frequency neighborhood is satisfied. Set the global step size parameter of the source signal parameter and the tap number n of the adaptive filter to determine its blind source signal, and obtain:
where
Step 7: vehicle WSN signal enhancement.
The vehicle WSN signal is output through adaptive filtering to obtain:
where
Update the weight coefficient in the vehicle WSN signal output above to obtain:
Among them,
Finally, the weight error vector of the adaptive filter is defined to enhance the signal, and the following results are obtained:
where
Experimental scheme
To validate the feasibility of the proposed signal enhancement algorithm, the vehicle wireless sensor network signal is collected using the process described in the Methods section above, simulation and performance comparison are carried out with MATLAB. In the experiment, the wireless sensor in Volkswagen model is the research object. It is assumed that the distance between neighbor nodes of vehicle WSN signals can be obtained. In the simulation, 100 unknown WSN signals are randomly deployed in the regular and irregular areas of the experiment. In addition, the coverage hole in the irregular area is changed to 60 m
Signal acquisition environment.
The collected vehicle WSN signal waveform is shown in Fig. 5.
Signal waveform of vehicle WSN.
It can be seen from Fig. 5 that with the change of the fluctuation, the noise is also changing. When the fluctuation is 500 Hz, the noise is the largest, which is 3 dB. When the fluctuation is 225 Hz, the noise is the smallest, which is
The removal accuracy of noise in WSN signals by the proposed method, the method literature [7] and the method literature [8] are comparatively analyzed, as shown in Fig. 6.
Signal noise removal accuracy of vehicle WSN with different methods.
From Fig. 6, it can be seen that there are some differences in the accuracy of noise removal in the WSN signals of sample vehicles by using the methods in this paper, literature [7] and literature [8]. When the number of network signals to be enhanced is 100 MB, the noise reduction accuracy of the method in this paper is about 92%, and the accuracy of noise removal in the WSN signals of sample vehicles by the methods in literature [7] and literature [8] is about 79% and 69%; When the number of network signals to be enhanced is 500 MB, the noise reduction accuracy of the method in this paper is about 96%, and the noise removal accuracy of the methods in literature [7] and literature [8] in the WSN signals of sample vehicles is about 81% and 70%; In contrast, the accuracy of the three methods for noise reduction increases, but in contrast, the accuracy of the proposed method is always higher for this experiment.
Stability analysis of vehicle WSN after signal enhancement.
Comparison of signal-to-noise ratio after signal enhancement by different methods.
In the experiment, the proposed method, the method in literature [7] and the method in literature [8] are comparatively analyzed in terms of the signal enhancement effect of WSN of sample vehicles. In this experiment, the stability of signal enhancement is taken as the comparison index to highlight the effectiveness of this method. The experimental results are shown in Fig. 7.
From Fig. 7, it can be seen that there are some differences in the signal stability of the three methods after using the methods in this paper, literature [7] and literature [8] to enhance the signal of the sample vehicle WSN. Among them, with the change of running time, the noise amplitude of the signal enhanced by this method is smaller and more consistent, while the noise amplitude of the other two methods is larger and there is a certain fluctuation, which verifies the effectiveness of the method.
Moreover, the experiment analyzes the signal-to-noise ratio research of different methods, as shown in Fig. 8.
It can be seen from Fig. 8 that there are some differences in the results of signal-to-noise ratio enhancement of WSN signals of sample vehicles by using the methods in this paper, literature [7] and literature [8]. When the iteration time is 50, the signal-to-noise ratio of the signal enhanced by the proposed method, the method in literature [7] and the method in literature [8] is about 110 dB, 80 dB, and 50 dB, respectively; When the number of iterations is 80, the signal-to-noise ratio of the signal enhanced by the proposed method, the method in literature [7] and the method in literature [8] is about 112 dB, 79 dB, and 53 dB, respectively; When the number of iterations is 100, the signal-to-noise ratio of the signal enhanced by the proposed method, the method in literature [7], the method in literature [8] is about 117 dB, 76 dB, and 51 dB, respectively; In contrast, the signal-to-noise ratio of the proposed method is always the highest in the work.
In order to improve the safety of vehicle driving, this paper has studied the signal enhancement of vehicle wireless sensor network as the starting point, and designed a vehicle WSN signal enhancement method based on adaptive filter. Analyze the vehicle WSN structure and node deployment method, and determine the signal operation process of the vehicle WSN. Analyze the relationship between RSSI and distance, and complete the signal acquisition of vehicle WSN. Set the signal strength judgment conditions of the vehicle WSN, and use an adaptive filter to remove the signal noise of the vehicle WSN to enhance the signal strength. Comparing experiments with the methods of literature [7] and literature [8], the final experimental results prove that the signal noise of the vehicle wireless sensor network enhanced by this method has less noise, has certain advantages, and has high operational stability and certain advantages. Transmission reliability. It provides a reference for the research in this field and has certain reference significance.