
Abstract
In order to solve the cooperation problem between the two arms of the dual arm robot, improve the effect and accuracy of the path planning of the intelligent robot, in this study, a new path planning algorithm for dual arm space (DAS) intelligent robot is designed. By analyzing the kinematics performance of DAS intelligent robot, the operation law of DAS intelligent robot is determined. By analyzing the collision that needs to be considered during the operation of DAS intelligent manipulator, a collision detection method based on capsule envelope is proposed to detect the collision of obstacles in the running path. Finally, the path planning model of DAS intelligent robot is designed by using immune genetic algorithm. The experimental results show that the path planned by this method can avoid obstacles and dangerous areas, and the accuracy of path planning for the existing environment is always higher than 90%. With the increase of iteration times, the planning time is relatively stable, about 5.5 seconds. The proposed method can enhance the effect and accuracy of path planning, effectively shorten the time of path planning, and improve the work efficiency of DAS intelligent robot.
Introduction
With the increasing labor costs and the increasing requirements for production efficiency, the transformation of domestic manufacturing industry has become very urgent. As a contemporary research hotspot and emerging industry occupation, industrial robot is the key technical field of manufacturing industry in China’s transformation [1]. It is of great significance not only to industrial production, but also to social development and strengthening national defense. In the industrial manufacturing industry, single arm industrial robot has been widely used in stamping, assembly, welding and other industries. In recent years, industrial manipulator has developed rapidly in the application fields of automobile assembly, palletizing, military medical treatment, daily life service and so on [2]. However, in some complex production processes, such as complex assembly operations, multi process processing operations, handling heavy objects, etc., the shortcomings of single arm robot in precision, complexity and compliance are becoming more and more obvious, and the multi robot system came into being [3]. In order to adapt to the tasks with increasing requirements for intelligence, complexity and system compliance, robot collaboration has become an important research content in contemporary society [4]. Different from single arm robot, the core of path planning of double arm robot is to solve the problem of cooperation between two arms. When planning dual arm robots, it needs to consider the resource allocation between the two robots, pursue the coordination of team interests and self-interests, and provide a theoretical basis for realizing more complex tasks [5].
Generally speaking, the motion planning of dual arm robot system mainly includes two aspects: task planning and motion coordination control. The two are different from each other and closely related. The former is realized through the flexible operation mechanism of multi robots, which is manifested in the workspace division and task allocation of multi robot system [6]. The latter mainly studies how to realize the control of coordinated motion between manipulators in the process of manipulator cooperation. The cooperation between robots determines the performance of multi robot system, therefore, multi robot cooperative motion entails higher requirements for system complexity. A key technology in the research of multi robot system is obstacle avoidance path planning among multi robots [7]. Therefore, to improve the working efficiency of DAS intelligent robot, many path planning methods have been studied, and some results have been achieved.
Du et al. [8] proposed a robot path planning method based on ant colony optimization (ACO) algorithm. When ACO is adopted to solve the global path planning of handling robot, there will be some problems, such as low planning efficiency and great impact on the planning effect caused by the change of ant colony algorithm parameters. The algorithm can intelligently adjust the combination of parameters according to different map conditions. The influence of important parameters of ant colony algorithm on planning efficiency is analyzed through experimental data, and the parameters are optimized. Aiming at the time-consuming problem of the improved algorithm, the dynamic inertia weight adjustment strategy of particle swarm optimization algorithm and the pheromone update strategy of improved ant colony algorithm are proposed to ensure the solution quality and improve the optimization efficiency. Simulation experiments show that the improved ant colony algorithm based on particle swarm optimization can give full play to the best performance of ant colony algorithm, improve the speed of mobile robot reaching the target point and reduce the loss. However, when the method encounters many interference obstacles, the detection of obstacle collision is poor, resulting in poor path planning effect. Xue et al. [9] proposed a path planning method for obstacle avoidance of double manipulators based on improved artificial potential field method. Simulation results show that this method is simple to implement, meets the requirements of obstacle avoidance for dual manipulators, and can effectively plan a collision free path for dual manipulators. However, this method takes too long time to plan when there are many path data. Hu et al. [10] proposed a mobile robot path planning method based on improved particle swarm optimization algorithm. The experimental results show that the improved particle swarm optimization algorithm improves the local and overall search ability, but the accuracy of path planning is poor.
In order to solve the problems of poor effect, slow path planning speed and poor accuracy in the above methods, this paper designs a DAS intelligent robot path planning algorithm to improve the effectiveness and accuracy of the DAS robot path planning, shorten the planning time, solve the cooperation problem between the two arms of the DAS robot, and improve the working efficiency of the DAS robot in industrial production. The main technical route is as follows:
determine the operation law of the DAS intelligent robot by analyzing the kinematic performance of the DAS intelligent robot; detect the collision of obstacles in the running path of DAS intelligent robot with the help of capsule bounding box structure analysis; finally, the path planning model of DAS intelligent robot is designed by using immune genetic algorithm, and the path planning algorithm of DAS intelligent robot is designed; experimental analysis; conclusion and future outlook.
The main feature of the proposed method is that the collision detection method of capsule envelope is used to detect the collision of obstacles in the running path, and the immune algorithm and genetic algorithm are combined to build the path planning model of DAS robot, which not only improves the effect and accuracy of path planning of intelligent robot, but also shortens the planning time.
Dynamic analysis of DAS intelligent robot
The DAS intelligent robot is composed of a floating base and a mechanical arm installed on the base. The mechanical arm is composed of two rigid links. Each split is connected by a rotating chain, and the relative rotation of each split is controlled by a joint drive motor. Because the position control of the floating base is often controlled by injecting fuel through the propeller, this method will consume a lot of limited fuel carried by the space robot, so as to shorten the on orbit service life of the space robot, and the movement of the position of the floating base will not have a great influence on the normal operation and stability of the system. In order to save fuel and prolong the on orbit service life of space robot, the position of its floating base is often in an uncontrolled underactuated state; compared with the movement of the position of the floating base, the tumbling motion of its attitude will cause the change of signal antenna primacy and affect the normal transmission of communication signal, excessive rolling motion will even cause problems such as shaking of liquid fuel carried by the space robot, so that the space robot system can not work normally. Therefore, it is very important to maintain the stability of the attitude of the floating base [11].
Basic structure of DAS intelligent robot.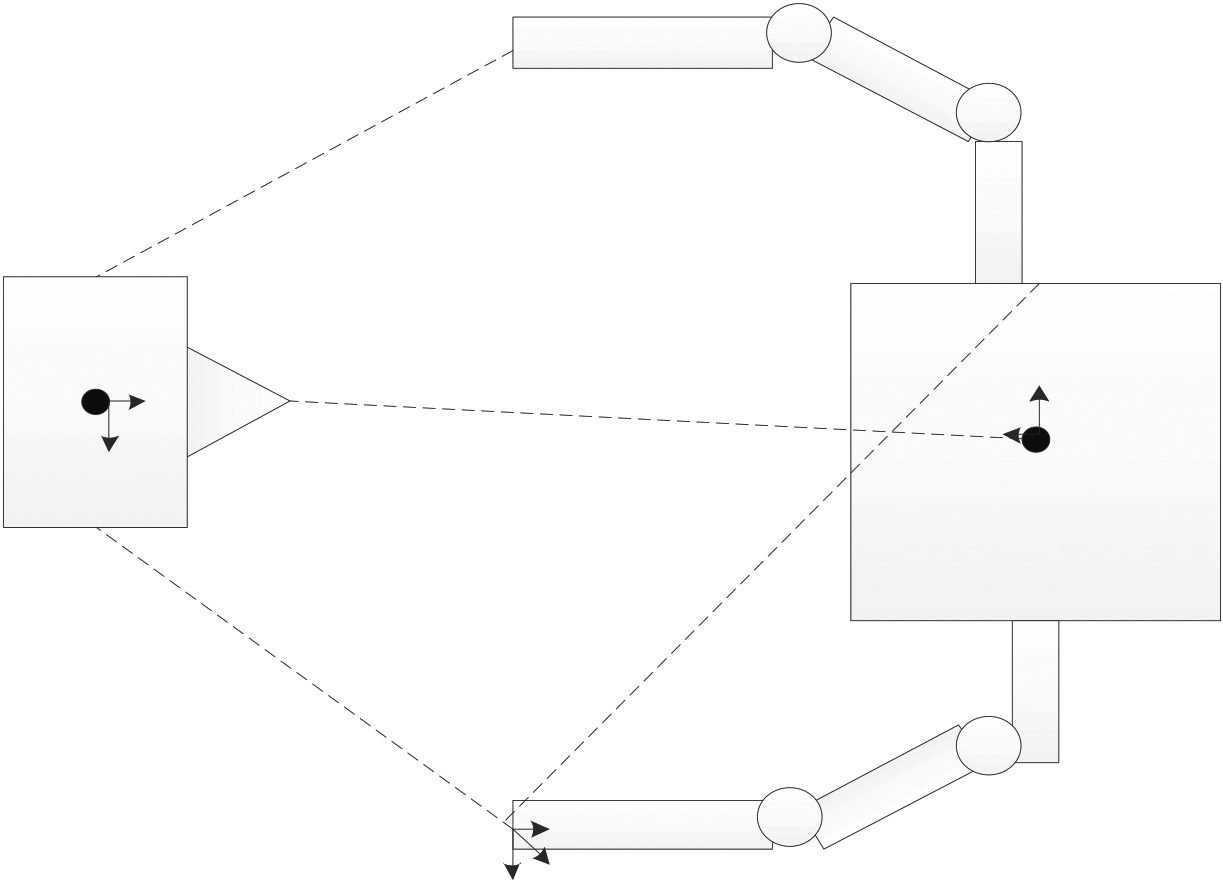
The kinetic energy expression of the DAS intelligent robot system can be obtained as follows:
Among these,
Since the two-arm space intelligent robot is in a space environment with a weak gravity gradient, it ignores its gravity potential energy
For the above DAS robot system with uncontrolled floating base position, it is assumed that the control input torque of the floating base attitude and the two joint joints of the manipulator is:
The impact force vector of the manipulator end claw
Then, according to the definition of the generalized coordinates, the generalized force vector
The dynamic model of the above DAS intelligent robot system in underactuated form can be further deduced when the position of the floating base is not controlled:
Among these,
To validate the path planning method of DAS intelligent robot, it is necessary to detect the collision objects during the operation of DAS intelligent robot to reduce the difficulty of path planning. Collision detection (CD) refers to detecting whether two or more objects in the environment jointly occupy the same spatial area, that is, whether a spatial area is occupied by multiple objects simultaneously [12]. For the collision detection algorithm of dual arm robot, the main research is that in the complex workspace with obstacles, the two manipulators of dual arm robot can reach the given target point from the given initial point, and use the algorithm to find a path that does not collide with static and dynamic obstacles in the workspace. According to whether the obstacle moves or not, collision detection can generally be divided into static collision detection and dynamic collision detection. Static collision detection mainly aims at detecting whether each moving joint of the manipulator collides with the obstacle. Dynamic detection includes continuous collision detection and discrete collision detection. The collision detection of the manipulator of the DAS intelligent robot should consider the collision between the manipulator and obstacles, the collision between the single mechanical link and the collision between the double mechanical link simultaneously. In order to facilitate calculation and improve the efficiency of collision detection, this section proposes a collision detection method based on capsule envelope by combining the boundary sphere and cylinder envelope methods [13]. Compared with the cylindrical model, this method takes the connecting rod and the joint part into consideration, and has higher accuracy. The capsule enclosure structure is shown in Fig. 2.
Capsule enclosure structure.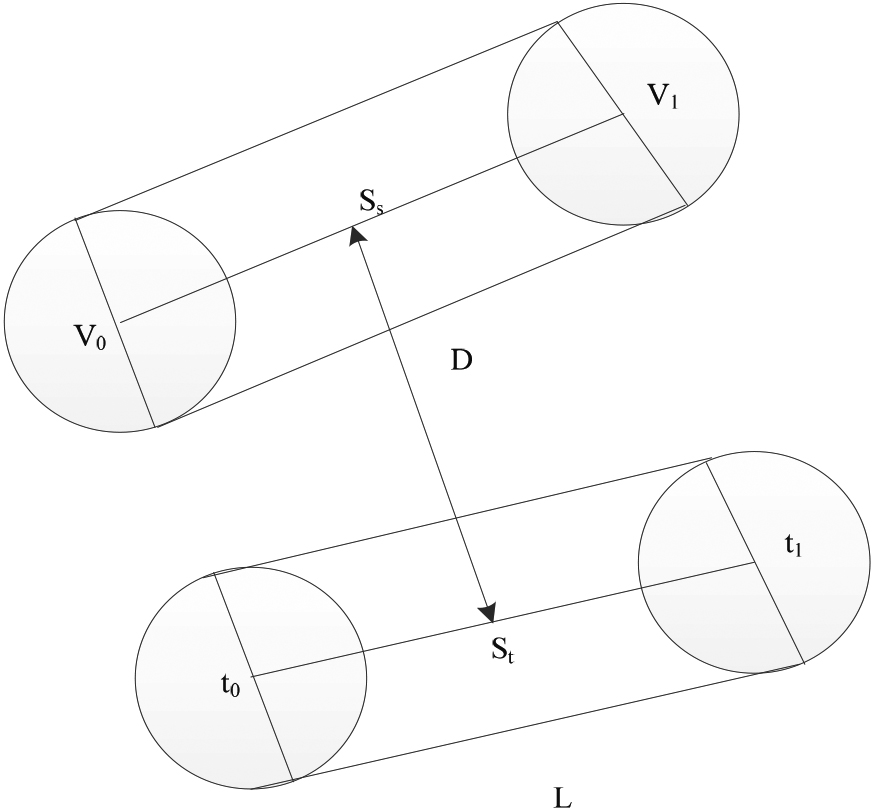
In Fig. 2, the center line of the capsule surrounding box is
where,
There are two points
Since the vector is perpendicular to the line
From the formula,
As a randomized search algorithm, genetic algorithm has strong global search performance and has natural advantages in finding the approximate optimal solution of the problem. There are two ways of immune system evolution: micro evolution and macro evolution. The micro evolution model mainly depends on hypermutation, but hypermutation does not exist only in the immune system. In nature, the survival ability of some animals also has hypermutation in a short time [14]. Therefore, hypermutation is only a special process in evolution and does not violate the law of natural evolution. The difference between genetic algorithm and immune algorithm is as follows:
The origin of immune algorithm and genetic algorithm is different. One is the internal competition between host and host, and the other is the external competition between individual and its own genes; Immune algorithm considers the interaction between individuals, while genetic algorithm does not; In immune algorithm, individuals have the right to choose genes, while in genetic algorithm, genes can only be determined by the external environment; Immune algorithm does not use crossover operator, and genes are optimized in the same generation. Crossover plays an extremely important role in genetic algorithm, which has a direct impact on the performance of the algorithm.
From the analysis of the biological basis of immune algorithm, it can be seen that when immune cells divide and differentiate stimulated by antigen, they produce a large number of antibodies to resist antigen invasion, which corresponds to the diversity characteristics of genetic algorithm. The inhibition and promotion mechanism of antibodies used to maintain immune balance in the immune system is beneficial to the fitness selection between individuals in genetic algorithm. This mechanism is very beneficial to enhance the local search ability of genetic algorithm. The memory mechanism of immune system to similar antigens is very beneficial to enhance the overall search ability of genetic algorithm.
Therefore, people can try to integrate the evolutionary mechanism of immune system into the algorithm design, design an immune evolutionary algorithm similar to genetic algorithm, and apply it to the path planning of DAS intelligent robot.
Assuming that in an antibody population of size M, each antibody can be represented by a 1 D vector of element n, several definitions associated with the algorithm can be described below. Similarity definition: If any two antibodies in the antibody group can be represented as:
And their fitness is that of
In the formula,
The quality of the antibody is actually the fitness of the antibody, and the greater the antibody fitness, the better the quality. If
Antibody concentration definition: If the number of antibodies similar to antibody
Selection probability definition: If the fitness of any antibody is
where
According to the basic parameters of immune genetic algorithm determined above, the path planning model of DAS robot is constructed. The specific steps are as follows:
Step 1: select the path planning operator of DAS intelligent robot.
The selection operator determines whether an individual can be selected to reproduce the next generation. Although individual selection is based on fitness, its selection process is indeed random. The quality of the selection operator is associated with the distribution of the number of individuals in the next generation. At present, the most commonly used selection operators are fitness proportion selection, tournament selection strategy and linear ranking selection strategy. In this paper, the tournament selection strategy is used to select the path planning operator of DAS intelligent robot. The tournament selection method is to randomly select a certain number of
Relationship between championship scale and selection intensity
Based on this analysis, the path planning operator of DAS intelligent robot is determined, and the following results are obtained:
Step 2: determine the crossover operator for path planning of DAS intelligent robot.
The operation of two-point crossover is similar to that of single point crossover. The difference is that two intersections are randomly selected on the parent chromosome, and the object area of two parent exchange becomes the chromosome part between the two intersections. Similarly,
Structure diagram of double point crossing operation principle.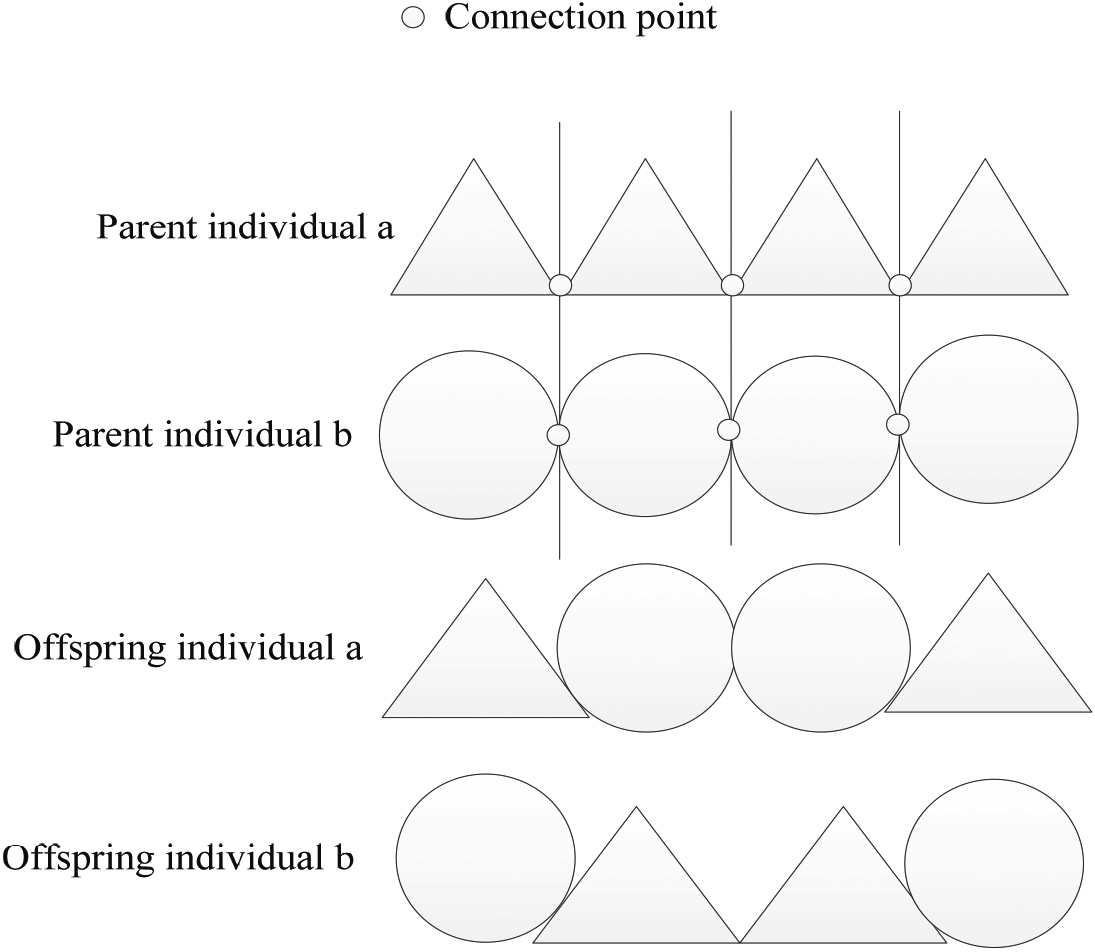
Step 3: path point confirmation of DAS intelligent robot.
To accelerate the convergence of the path planning algorithm, the random selection factor should be improved to have a trend to follow the number of iterations of the algorithm, and new random selection factor E is designed as shown in E. Through this method, the search range is large enough in the initial search of the algorithm; with increasing searches, the search range gradually decreases, and the final search range approaches 1/e times the original search range:
where
In the analysis, the points in the plane rectangular coordinate system are directly used to represent the path of the robot. The walking path of the robot is composed of path points, and a path point is represented by the abscissa and ordinate of the path point. In order to facilitate calculation, the included angle of the next position of the robot relative to the current position is used to represent the path of the robot. As shown in Fig. 4, the light green square border represents the path point of the robot.
Determination of path points of DAS intelligent robot.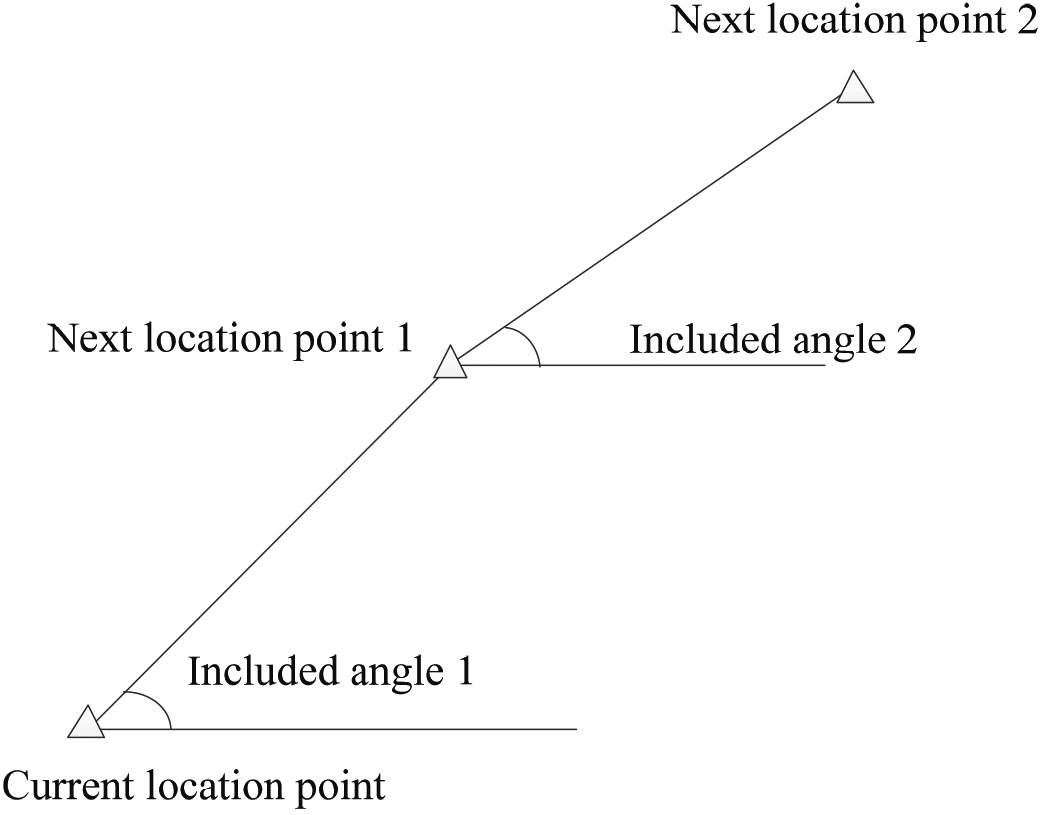
Step 4: Constructing the path planning model of DAS intelligent robot.
To realize the path planning of the DAS intelligent robot, the DAS intelligent robot path planning model is constructed here. If the step value of the robot walking is constant, assuming that the step value is stepLen, the lower position 1 path point can be calculated according to the current position 1 path point and the included angle 1. After obtaining the coordinate value of the next position 1 (that is, the coordinate value of the current position 2), the coordinate value of the next position 2 can be obtained through calculation. Through this method, the path point coordinates of the whole path of the robot can be obtained, that is:
where
According to the above determined path coordinate points of DAS intelligent robot, the path planning model of DAS intelligent robot is constructed to realize the path planning of DAS intelligent robot:
Among them,
Experimental environment
Environment modeling is the first step of robot path planning, which greatly affects the efficiency and advantages of robot path planning. A good environment modeling method should ignore the factors that have little impact on the robot motion in the actual environment and simplify the description of the environment. At the same time, the establishment of environmental model will simplify the description of the problem. In the experiment, there are five circular obstacles of different sizes in the environment map, which are represented by squares. It is specified that a circle with the same center and a radius four units longer than the radius of the obstacle is a dangerous area, which is represented by a circular area. The robot should avoid passing through the dangerous area as far as possible. The start and end points of the robot are randomly generated and connected by lines. As shown in Fig. 5.
Experimental environment map.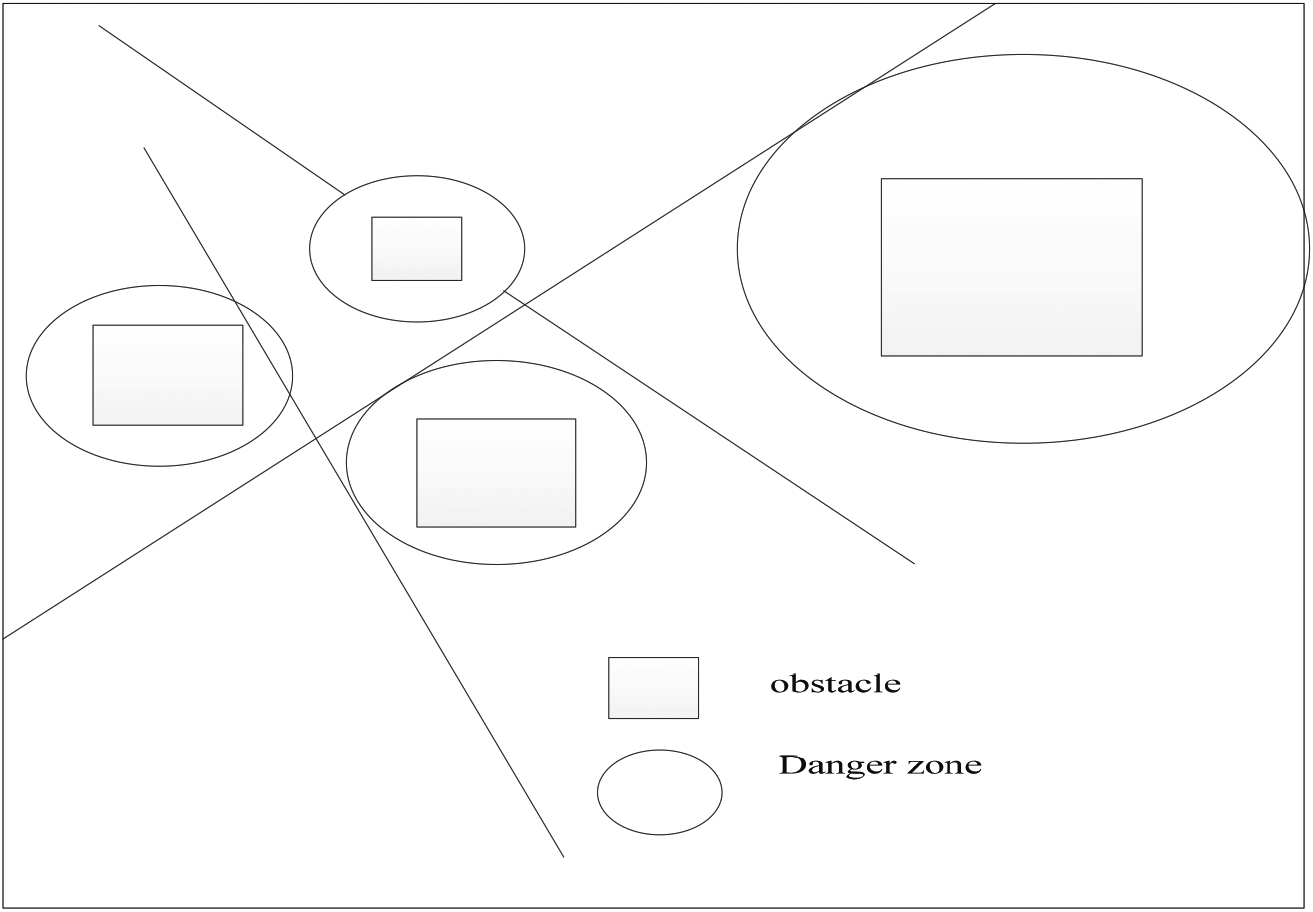
Set the number of cycles of simulation to 1000 and the initial population size to 20, that is, the genetic operator is 10.
The feasibility of the proposed method is verified through three aspects: the effect of path planning, the accuracy of path planning and the time-consuming of path planning. The proposed method, the method in Literature [8] and the method in Literature [9] and the method in Literature [10], are comparatively analyzed in the same experimental environment. There are four obstacles of different sizes and three robots in the environment. The positions of the randomly selected starting point and target point are shown in the figure. After setting the environment map, the path planning is carried out in this environment map, and the results are shown in Fig. 6.
Path planning effects of different methods.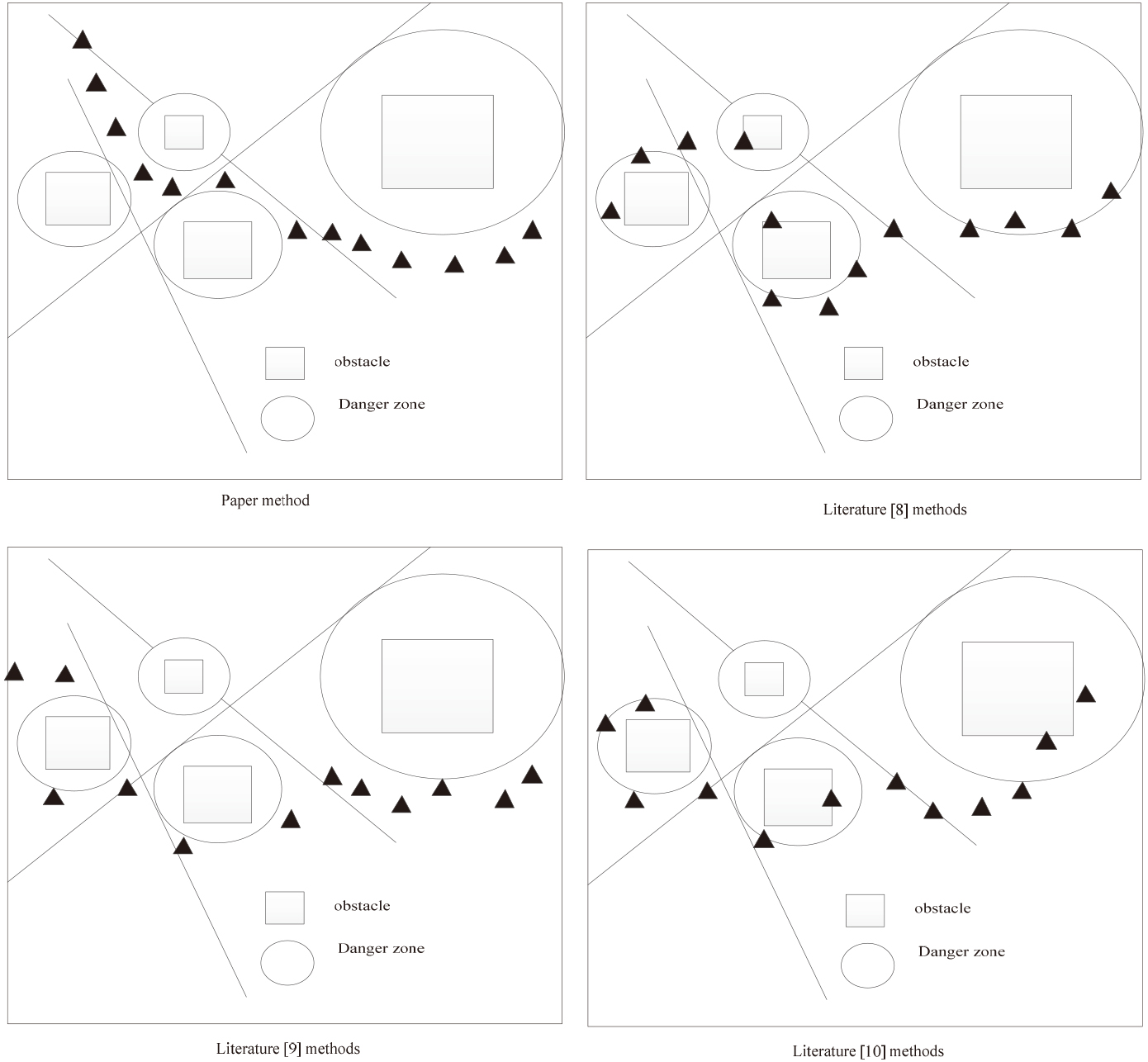
The proposed method, the methods Literature [8] and Literature [9] and Literature [10] have different effects on path planning under the same experimental environment. Among them, this method shows in the planned route that the path planned by this method can avoid obstacles and dangerous areas, and the path planned by the method in document [9] can also avoid obstacles and dangerous areas, while the roads planned by the other two methods have the problem of collision with obstacles, which shows the effectiveness of this method.
The proposed method, the methods in Literature [8] and Literature [9] and Literature [10] are compared in the accuracy of path planning. The results are shown in Fig. 7.
By analyzing the experimental results in Fig. 7, the accuracy of path planning using the proposed method, method in Literature [8] and method in Literature [9] and method in Literature [10] under the same experimental environment is different. Among them, the path planning accuracy of this method for the existing environment is always higher than 90%, but the path planning accuracy of Literature [8] method and Literature [9] method and Literature [10] method in the same experimental environment is lower than this method. This is because this method uses immune genetic algorithm to design the path planning model of DAS intelligent robot and complete the path planning algorithm design of DAS intelligent robot. The accuracy of planning is improved.
The time-consuming of path planning of the four methods are compared.
Time consuming analysis of path planning with different methods (s)
Accuracy of path planning with different methods.
When the number of iterations is 60, the planning time of the proposed method is about 5.5 s, that of the method in Literature [8] is about 6.6 s, and that of the method in Literature [9] takes about 7.2 s, and that of the method in Literature [10] is about 6.2 s. When the number of iterations is 100, the planning time of the proposed method is about 5.5 s, that of the method in Literature [8] is about 7.3 s, and that of the method in Literature [9] takes about 7.5 s, and that of the method in Literature [10] is about 7.0 s. The planning time of the proposed method is relatively stable, and always lower than the other three methods.
With the continuous development of social productivity, more and more industries tend to improve the degree of automation. With the development of robot technology, robot application scenarios have appeared in all walks of life. Therefore, the research on robot technology is particularly necessary. The core of dual arm robot path planning is the cooperation between two arms. In order to adapt to the task of increasing the requirements of intelligence, complexity and system compliance, robot cooperation has become an important research content in contemporary society. Therefore, the DAS intelligent robot path planning algorithm is proposed. The collision detection method based on capsule envelope is used to detect the collision of obstacles in the running path. Then the path planning model of DAS intelligent robot is constructed by combining genetic algorithm and immune algorithm, and the effective path planning of DAS intelligent robot is completed. The experimental results show that the path planned by this method can avoid obstacles and dangerous areas, and the accuracy of path planning for the existing environment is always higher than 90%. With the increase of iteration times, the planning time is relatively stable, about 5.5 seconds. To a certain extent, the work efficiency of DAS intelligent robot is improved, so as to provide reliable value reference and help for the future research of intelligent robot in the industrial field.