
Abstract
Robots are widely used in all walks of life, and their excellent work efficiency has been paid attention to. As the key component of robot, manipulator plays an important role in the running performance of robot. In order to effectively improve the trajectory accuracy and efficiency of the manipulator, a six degree of freedom (6-DOF) modular manipulator trajectory planning method based on polynomial interpolation is proposed, and its feasibility and effectiveness are verified by experiments. At the same time, the performance of the method is compared with two other methods of the same type. The experimental results show that the six degree of freedom modular trajectory planning method has a shorter running time, and the shortest running time is 1.62 s. Compared with the directions in previous studies, the planning trajectory of the proposed method is more practical and its accuracy is higher. In the iterative process, the running time of the proposed method is also the shortest. In addition, the minimum error of the three methods is about 1%, which is lower than the other two methods. It is concluded that the six degree of freedom modular trajectory planning method has high feasibility and performance, which is of great significance to improve the operating efficiency and stability of the robot.
Introduction
With the development of science and technology, robots that used to exist only in science fiction, movies and TV dramas can now be seen everywhere in daily life. The development of robots has brought many conveniences to human production and life, and has been widely used in various fields [1]. For example, robots have been widely used in various fields such as automobile manufacturing, general machinery, construction, metal processing, family services and entertainment. Robot is the imitation of human behavior. It can replace heavy manual labor to a large extent. It can not only reduce the occurrence of safety accidents, but also improve the production efficiency and economic benefits of enterprises [2]. In the current research and application of robots, the manipulator is the focus of researchers. As the core element of robot, manipulator plays a key role in the operation performance of robot [3]. For the manipulator, the trajectory is usually planned to improve the accuracy and stability of the robot motion. The robot performs relevant operations through the robot arm. After optimizing the relevant trajectory of the robot arm, the operating performance of the robot can be improved in practical applications, thereby reducing errors and losses [4]. Therefore, the trajectory planning of the robot arm is deeply studied in order to improve the performance of the robot.
Related work
Many scholars at home and abroad have done a lot of research on the trajectory planning of the manipulator. For example, Tan proposed an improved genetic algorithm to search the intermediate point of the manipulator trajectory planning method. In this method, the trajectory planning method of inserting the optimal intermediate point is proposed, which aims to achieve obstacle avoidance while ensuring the shortest trajectory and minimum joint angle variation. The working principle of the humanoid arm manipulator is introduced, and the kinematics model of the manipulator is established; The trajectory planning method of inserting the optimal intermediate point is proposed, and the collision detection strategy is defined; For the selection of the optimal intermediate point, the optimal intermediate point is selected. Based on the traditional genetic algorithm, a uniform initial population generation method is proposed. The crossover probability is constructed by using the population distribution entropy and fitness variance, and the mutation probability is constructed according to the individual fitness value and population average value. Thus, an optimal intermediate point optimization method based on improved genetic algorithm is proposed. This method has high accuracy for trajectory planning of manipulator, but the process is more complex and consumes more time [5]. A time optimal manipulator trajectory planning method based on penalty function method is proposed by Li [6]. Firstly, the shortest point-to-point motion time of the manipulator in static environment is taken as the optimization objective, and the angle, angular velocity and angular acceleration of the manipulator joint are taken as the constraint parameters, and the space trajectory of the joint is interpolated by using the 5-5-7-5 degree polynomial. Then, the polynomial interpolation time is calculated by using the penalty function method. Finally, the motion angle curve and velocity curve of the joint are obtained. The method is applied to a 6-DOF PUMA560 robot. The results show that the joint running time is significantly shortened and the operation efficiency of the manipulator is improved after optimization when the smoothness of the joint motion angle curve, velocity curve and acceleration curve is not obvious. In this method, the characteristics of manipulator operation are considered comprehensively, and the planned route is better, but the interference processing effect is not good. An improved cuckoo search algorithm for robot arm trajectory planning is proposed by Chen and Li [7]. Based on the general model of space manipulator, the motion equation of space manipulator is established. According to the constraint conditions of base attitude, joint angular velocity and angular acceleration, the trajectory planning model of space manipulator is constructed, and the optimization is carried out by improving cuckoo search algorithm. This method can make the final state of the joint reach the desired state, improve the smoothness of the joint trajectory, and overcome the interference of the manipulator motion on the base attitude. The stability of the manipulator system is enhanced, but the analysis of the characteristics of the 6-DOF modular manipulator is less, which needs further improvement.
Aiming at the problems of efficiency and performance in the research of robot trajectory planning, a method based on polynomial interpolation is proposed and analyzed. The research has analyzed the position and posture description and coordinate change of the 6-DOF manipulator, which has been the theoretical premise of its trajectory planning. At the same time, the specific trajectory planning method of the manipulator is discussed, and its effect is analyzed and evaluated through relevant experiments. The technical route of this method is as follows:
The position and posture of the 6-DOF modular manipulator are analyzed, and the spatial position of the 6-DOF modular manipulator is determined by its spatial coordinate transformation; The basic concepts and applications of polynomial interpolation are analyzed; The application of polynomial interpolation method in trajectory planning of manipulator is analyzed and discussed; Through experimental analysis, the application effect of polynomial interpolation method in trajectory planning of manipulator is demonstrated.
Model construction and trajectory planning analysis of manipulator
Pose description and coordinate transformation of manipulator
The main body of the robot and the robot arm are usually connected by a plurality of motion joints and links, and the Cartesian space position of these joints and links is the position and posture of the robot. Through the description of the position and posture, the motion state of the robot can be accurately grasped [8]. For a six degree of freedom manipulator, three degrees of freedom can be used to describe its spatial positioning, and the remaining degrees of freedom are used to determine the end posture [9]. A rectangular coordinate system
In the Eq. (1),
In Eq. (2),
Meanwhile, the matrix representation of the robot rigid body after rotating
In Eq. (4),
Translation transformation of modular manipulator with six degrees of freedom.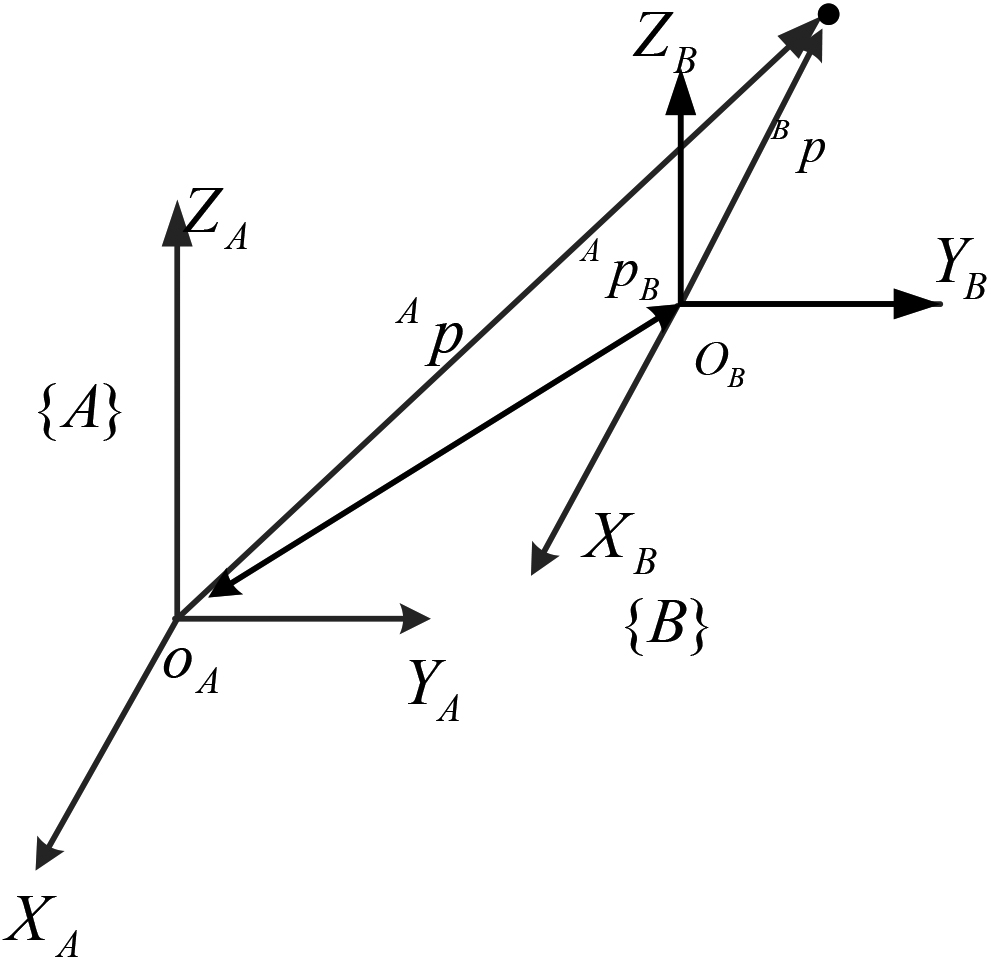
In Fig. 1, the vector
When the coordinate system
Six-DOF modular manipulator rotation transformation.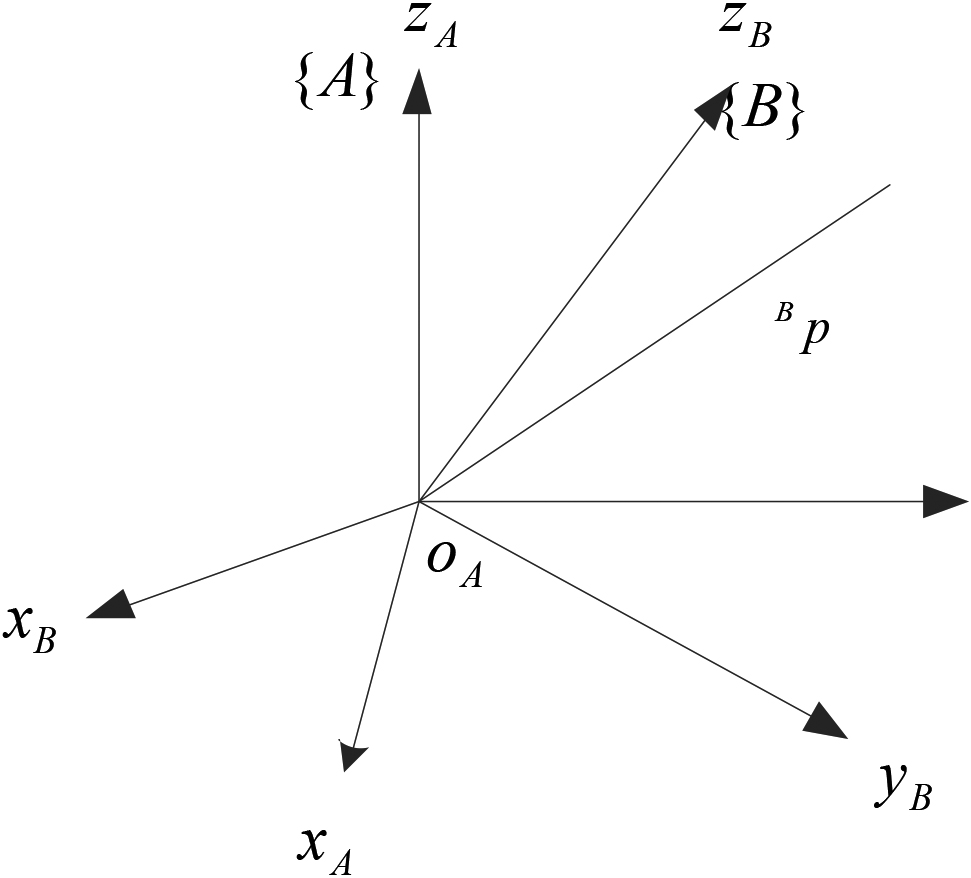
The rotation matrix
Since each vector in the rotation matrix is a unit vector and orthogonal to each other,
It can be simplified to Eq. (8) by Eq. (6).
Similarly, the coordinate hybrid transformation of the robot arm can be combined from the translation transformation and the rotation transformation, so it will not be described in detail.
Trajectory planning is the design and planning of the movement path of the manipulator, which depends on the initial state and the end state of the manipulator end effector [14]. At the same time, trajectory planning can be divided into joint space and Cartesian space. The former plans by controlling the joint quantity, while the latter plans by mapping relevant constraints into joint space and then controlling joint variables [15]. For joint space planning, the starting point is usually determined, so the middle point on the trajectory can be calculated by interpolation [16]. There are many interpolation methods, and the research mainly focuses on the application and analysis of polynomial interpolation. Polynomial interpolation is a set of all algebraic polynomials in
In Eq. (9),
Suppose
In Eq. (10), the
In the 6-DOF modular manipulator trajectory planning, the task space trajectory of 6-DOF modular manipulator includes position planning and manipulator end pose planning. Polynomial difference is a method to describe the end pose of manipulator [20]. In trajectory planning,
Suppose that the angle (
The transformation state of the rotation angle from the initial state to the final position at the end of the six-degree-of-freedom modular robotic arm is obtained, that is:
After obtaining the above state, the whole attitude change process is discretized, and the amount of rotation pick up is changed, that is:
Among them, the Then obtain any step of the six-degree-of-freedom modular manipulator end change angle, that is:
According to the change of the terminal Angle, get the attitude matrix of the modular manipulator with six degrees of freedom. The translation displacement characteristic quantity of the end effecator is obtained by changing the angle. The movement changes of six joint angles of the 6-DOF modular manipulator are transformed into the space trajectory planning problem to realize the attitude planning of the 6-DOF modular manipulator.
During the process of terminal pose planning, the pose angle is increasing. Typically, the 6-of-freedom modular manipulator passes through the target path point in the moving path. If you stay at this point for a long time, it is necessary to solve the inverse motion of the path point and obtain the joint vector of the corresponding connection angle. Therefore, in order to ensure the accuracy of trajectory planning of 6-DOF modular manipulator, it is necessary to further plan the growth rate of attitude angle [21]. A 6-degrees-of-freedom modular manipulator trajectory inverse kinematics model is obtained through pose planning
It is assumed that the joint velocity of the path node passed by the 6-DOF modular manipulator can be set according to the demand, and then the polynomial can be applied to deal with it:
At this time, the polynomial planning of the 6-DOF mode manipulator trajectory through the inverse kinematic model is obtained as follows:
In the trajectory planning of 6-DOF modular manipulator, polynomial difference is used to determine the attitude of the end of the 6-DOF modular manipulator. The trajectory planning of the 6-DOF modular manipulator is determined by the rotation angle of the end of the 6-DOF modular manipulator. On this basis, the inverse motion of the path point is further solved by polynomial to complete the 6-DOF modular manipulator Arm trajectory planning.
Experimental environment and parameter index
In this paper, MATLAB platform is used to simulate the motion trajectory of 6-DOF manipulator. The experimental operating system is Windows XP system, with a system memory of 8 GB and a CPU of 3.6 GHZ. In order to ensure the accuracy of the experimental data statistics, SPSS 13.0 was used to make statistics on the experimental data. Initialize, set and calculate the parameters of relevant points corresponding to each joint of the manipulator, as shown in Table 1.
Initialization parameter setting of each joint point
Initialization parameter setting of each joint point
It can be seen from Table 1 that the research takes the 6-joint robot as the experimental research object, analyzes its operation trajectory, sets its constraint conditions, and sets experimental welding points to study the trajectory planning effect. The constraint conditions of the experimental robot are shown in Table 2.
Constraints of experimental robot
At the same time, the motion control of the robot is described. The first is joint control: that is, set the forward or reverse rotation speed of the relevant rotation axis to 5
Robot configuration diagram.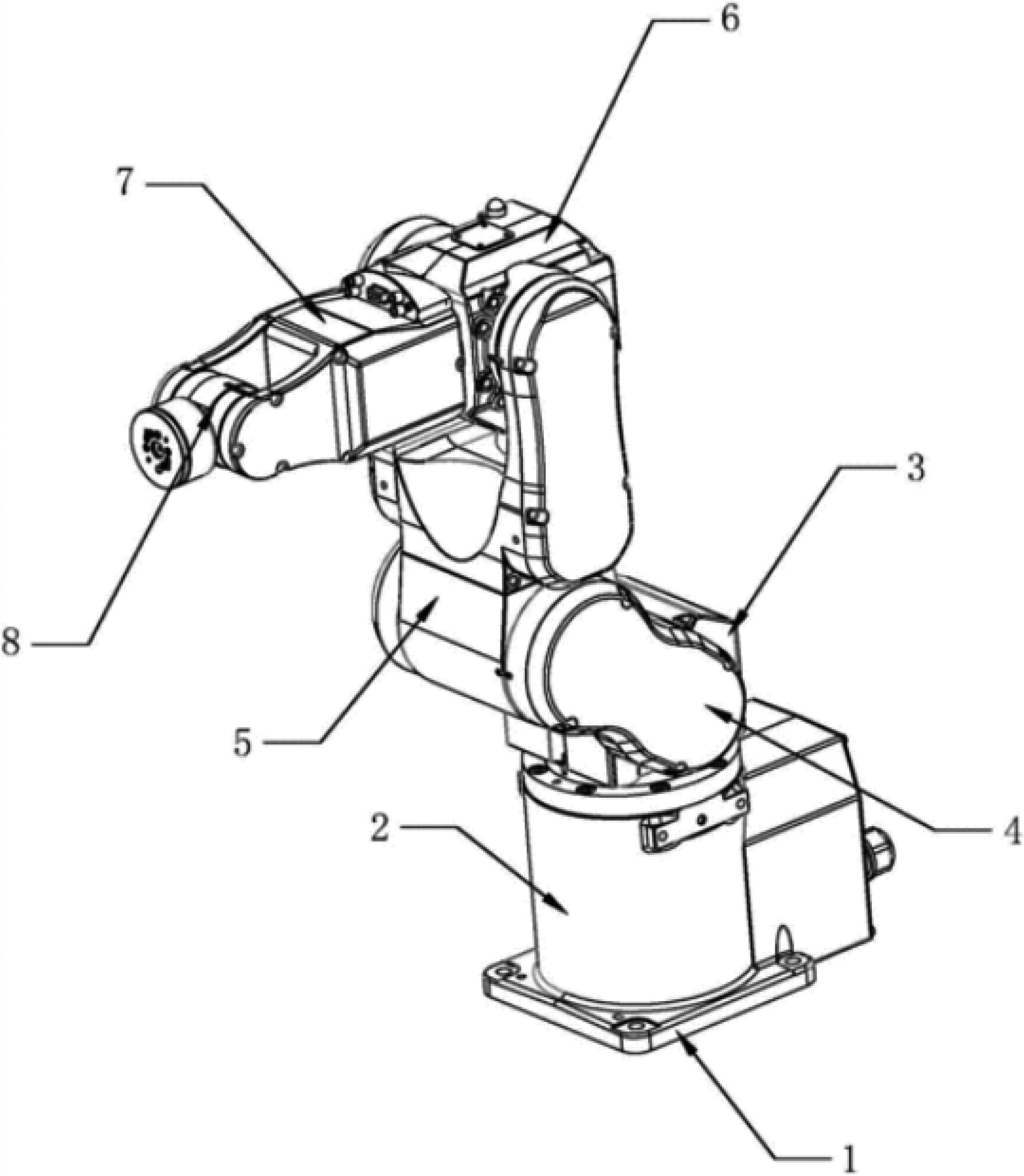
As can be seen from Fig. 3, the utility model relates to a six axis manipulator, which is characterized in that it comprises a base (1); A turntable (2) is arranged on the base (1), the turntable (2) is rotationally connected with a first movable part (3), and the first movable part (3) rotates with the center of the turntable (2) as the axis; The first movable part (3) is rotationally connected with a second movable part, and the rotation direction of the second movable part is perpendicular to the rotation direction of the first movable part (3); The second movable part is rotatably connected with a mechanical arm for installing a fixture; The mechanical arm comprises a base (6) rotationally connected with the second movable part and a rotating arm (7) rotationally connected with the base (6); The base (1) is provided with an automatic control device, and the rotary table (2), the first movable part (3), the second movable part and the mechanical arm are respectively controlled by the automatic control device. From the dimensions of Table 1, it can be inferred that all six joints are revolute joints. The configuration of the six-axis robot (Fig. 3), that is, the six joints are in the form of rotation-pitch-pitch-rotation-pitch-rotation. The big arm and the small arm of the robot are thin-walled frame structures made of high-strength aluminum alloy materials, which are driven by gears and have high transmission rigidity. In addition, the link size of manipulator is shown in Fig. 4.
Link size of manipulator.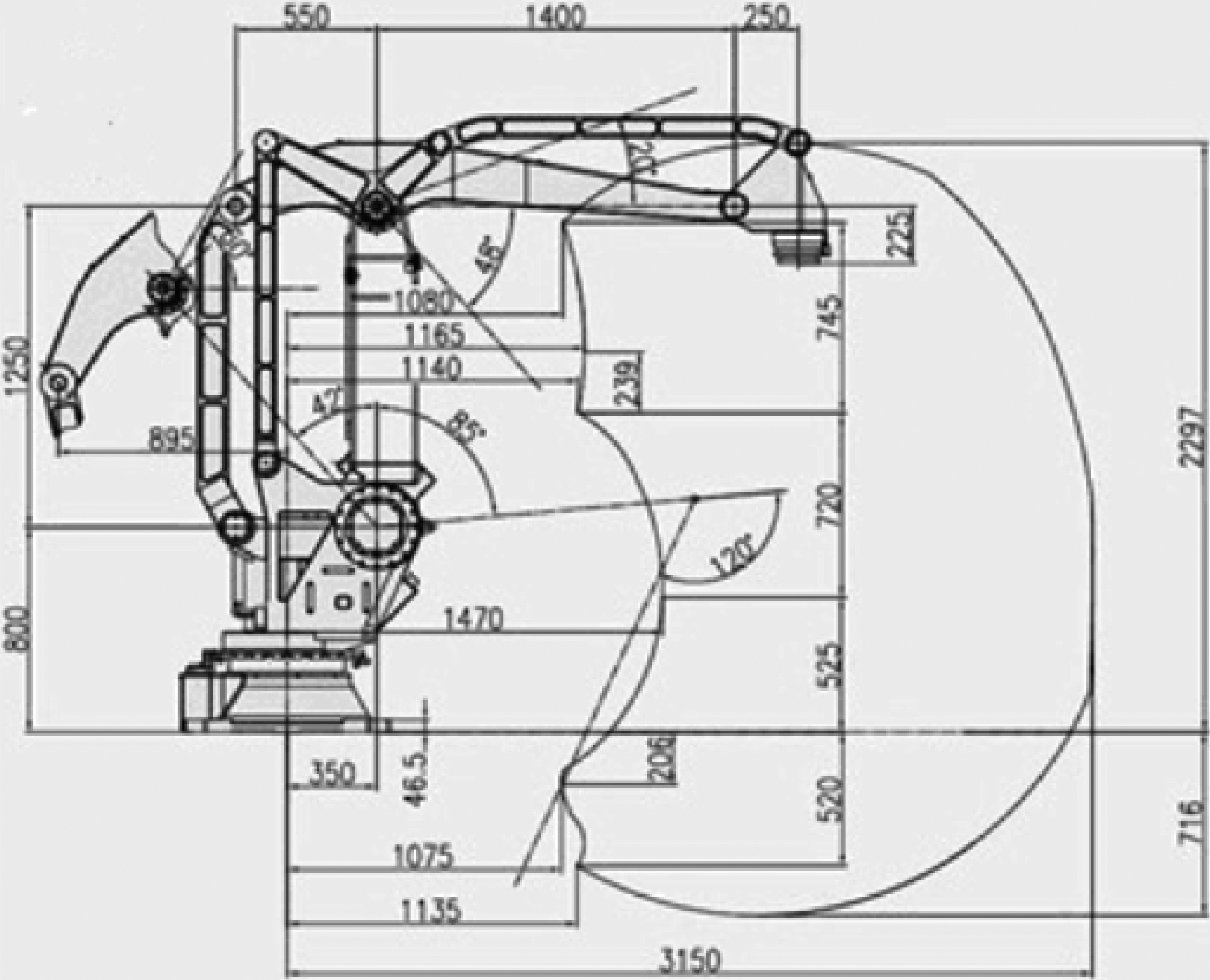
In order to verify the effectiveness of the proposed method, the accuracy of trajectory planning, the time consumption of planning and the error of spatial coordinate transformation are taken as the experimental indexes to compare the proposed method, the method in Reference [5] and the method in Reference [6].
Firstly, the shortest and optimal energy consumption time of robot trajectory planning in the experiment is statistically analyzed, as shown in Table 3.
Target of robot trajectory planning
Target of robot trajectory planning
It can be seen from Table 3 that after the trajectory planning of the robot’s robot arm is carried out by using the 6-DOF modular trajectory planning method of polynomial interpolation, the corresponding trajectory running time is shorter, indicating that this method can effectively improve the operating efficiency of the robot arm. In order to verify the reliability of the proposed method, the accuracy of the proposed method, the method in Reference [5] and the method in Reference [6] are analyzed experimentally. The experimental results are shown in Fig. 5.
Comparison of the accuracy of manipulator trajectory planning with different methods.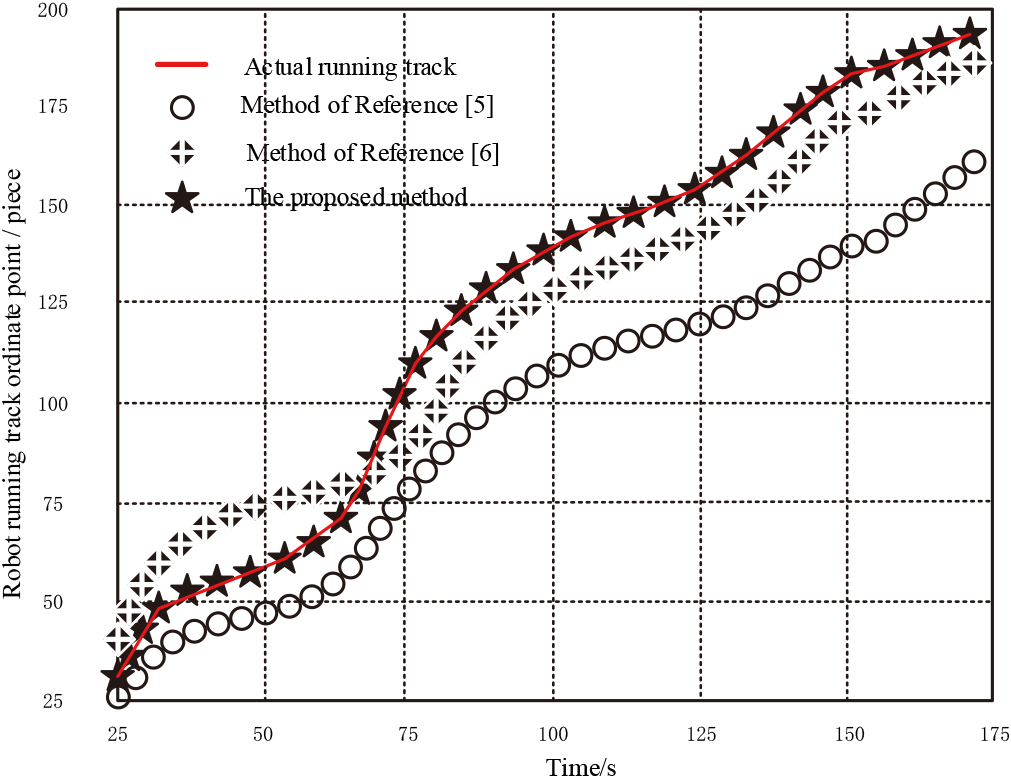
It can be seen from Fig. 5 that there is a certain gap in the accuracy of trajectory planning using the three methods under the same experimental environment. Among them, the planning trajectory of the proposed method is highly consistent with the actual planning trajectory of the manipulator, because the method transforms the spatial coordinates of the manipulator before the trajectory planning, which can obtain the coordinate position well and improve the planning accuracy. In contrast, the planning trajectories of References [5] and [6] have large errors with the actual planning trajectories. The results show that the proposed method can achieve smaller experimental error and higher experimental accuracy. At the same time, on the premise of ensuring the trajectory planning accuracy of the manipulator, the time consumption of the proposed method is compared with that of the methods in Reference [5] and Reference [6]. The experimental results are shown in Fig. 6.
Time-consuming analysis of manipulator trajectory planning by different methods.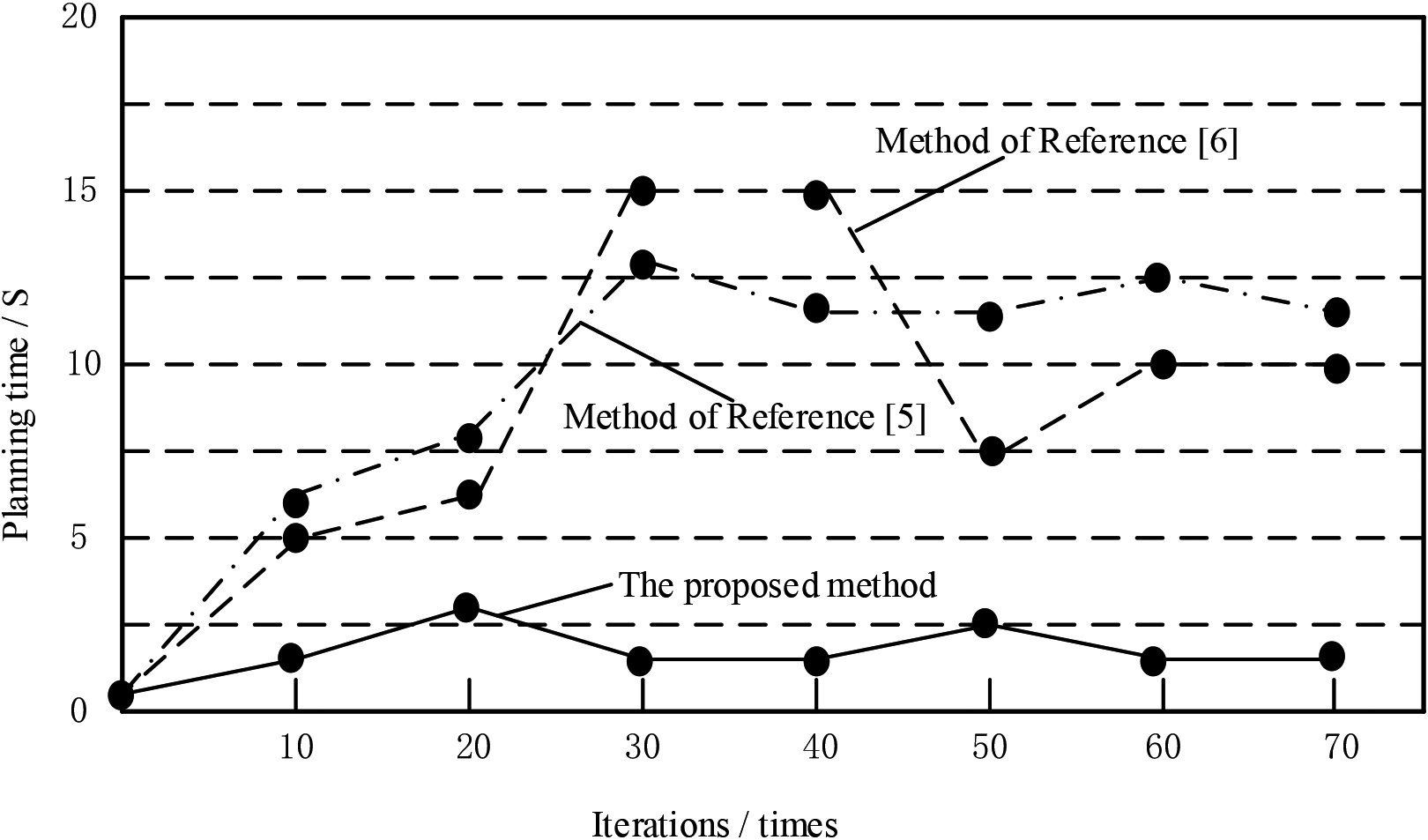
It can be seen from Fig. 6 that the trajectory planning running time of the three methods varies with the number of iterations. Among them, the running time of the method proposed in the study can remain stable, while the running time of References [5] and [6] shows a slow rising trend. When the number of iterations is the same, the running time of the proposed method is the shortest. For example, when the number of iterations is 50, the running time of the proposed method is about 2.5 s, while the running time of Reference [5] and Reference [6] are about 11.3 s and 7.5 s respectively. The results show that the proposed method has higher operation efficiency. In addition, in order to further verify the reliability of the proposed methods, the space coordinate transformation errors of the three methods during the operation of the manipulator are compared and analyzed, as shown in Fig. 7.
Error analysis of spatial coordinate transformation of different methods.
It can be seen from Fig. 7 that the operation errors of the three methods gradually decrease with the increase of the number of iterations, and converge faster before the number of iterations is 40. When the errors of the three methods tend to be stable, the minimum error of the proposed method is about 1%, which is lower than the other two methods, indicating that this method has high feasibility and effectiveness.
The traditional trajectory planning method of manipulator has some problems such as low accuracy and long time-consuming. Therefore, a 6-DOF modular manipulator trajectory planning method based on polynomial interpolation is proposed. Through the analysis of relevant experimental results, it can be seen that the trajectory planning method of 6-DOF modular trajectory planning based on polynomial interpolation can effectively improve the operating efficiency of the robot arm. Under the same experimental environment, the planning trajectory of the proposed method is highly consistent with the actual planning trajectory of the manipulator, while the planning trajectory of Reference [5] and Reference [6] has a large error with the actual planning trajectory. In the comparative experiment of running time varying with the number of iterations, when the number of iterations is the same, the running time of the proposed method is the shortest. For example, when the number of iterations is 50, the running time of the proposed method is about 2.5 s, while the running time of Reference [5] and Reference [6] are about 11.3 s and 7.5 s respectively. In the error comparison analysis of the three methods, when the errors of the three methods tend to be stable, the minimum error of the proposed method is about 1%, which is lower than the other two methods. In conclusion, the trajectory planning method of 6-DOF modular manipulator based on polynomial interpolation has high feasibility and effectiveness. However, there is still room for improvement in the research, such as further research on its experimental performance in complex environment.
Footnotes
Acknowledgments
The research was supported by the Fund of S&T of Guangxi Province, China: Construction of Comprehensive Testing Platform for Earth Moving Machinery Operation Process (No.: 1598021-2).