
Abstract
Mechanical fault detection has an important influence on production schedule and efficiency. With the development of intelligent technology, more and more intelligent detection technologies are applied to mechanical fault detection. In order to detect mechanical faults more efficiently and accurately, this experiment proposes a production knowledge base model based on genetic algorithm (GA algorithm). The model uses the unique biological genetics principle of genetic algorithm to evolve the interested population, and can conduct spatial search to find the global optimal solution. By comparing the performance of GA algorithm model with other similar detection models, it is found that the model proposed in the experiment has obvious advantages in mechanical fault detection performance. The experimental results show that the maximum accuracy of the GA algorithm is 0.935, 0.074 higher than the support vector machine (SVM) model, 0.118 higher than the linear discriminant analysis (LDA) model, 0.032 higher than the random forest (RF) model, and 0.166 higher than the K nearest neighbor (KNN) model. In addition, the error value of GA algorithm is the lowest among these models, which is 0.028. This proves that the genetic algorithm model has higher diagnostic accuracy and can play an important role in mechanical fault detection.
Introduction
Nowadays, with the development of high technology, the manufacturing industry is gradually becoming intelligent and mechanized. And in the daily production process of machinery manufacturing, mechanical failure and other problems will inevitably occur. Mechanical failure has an important impact on daily production, because mechanical production presents a holistic situation, if a failure in a part, often affect the entire production process, and therefore will have a certain impact on the production schedule and production efficiency. The complexity and unpredictability of mechanical failures make it difficult to detect them [1]. In today’s manufacturing production, there are more mechanical fault detection techniques and methods, however, for some of the less efficient methods, it will not only affect the detection effect, but also cause a lot of human and financial resources waste, so it is necessary to find an efficient mechanical fault detection method. Traditional mechanical fault detection methods are data-driven and signal processing, etc., however, with the development of intelligent technologies, some diagnostic methods based on deep learning and machine learning have emerged, such as genetic algorithms, neural networks, knowledge graphs, etc. [2]. These intelligent detection methods based on big data have been improved compared to the traditional detection methods and have a substantial improvement in detection efficiency. The successful application of these intelligent techniques in the field of mechanical detection of faults has led to a better solution to a large number of complex fault detection problems. As one of the widely used intelligent detection algorithms, genetic algorithm has great advantages in detection performance. This experiment aims to compare the performance of genetic algorithm and other similar intelligent fault detection models, and analyze and evaluate their advantages in mechanical fault detection.
Related work
In mechanical fault detection, many researchers have proposed different detection methods for different fault problems. For example, Ji et al. [3] proposed a hybrid model combining the advantages of genetic algorithm and machine learning. The model is applied to the prediction of width deviation in the steel production system, which is an important index for evaluating the quality of hot rolled strip steel. The results show that the prediction model can effectively balance the prediction accuracy and interpretability, and has strong practical significance. For the denoising problem in mechanical fault detection, Zhang et al. [4] proposed a two-layer nested sparse optimization method and demonstrated the feasibility and superiority of this framework through bearing fault detection experiments. Geng and Du [5] applied fiber optic sensors for bearing fault detection, which have the characteristics of small size and flexible placement. Therefore, it has better sensitivity and diagnostic capability in fault diagnosis. There is a major problem in mechanical fault detection: class imbalance problem, and Pan et al. [6] proposed a deep feature generation network detection method for this problem, and the experimental results showed the effectiveness and superiority of this method. Abdelrahim [7] applied a long short-term memory neural network for electromechanical actuator fault detection, and the algorithm was modified it by adding sliding windows to improve its performance, and the experimental results showed that the algorithm has a better performance in fault detection and isolation. For the problem of mechanical fault detection under rotational speed variation conditions, Wang et al. [8] proposed a simple rotational speed-free order tracking method based on order spectrogram visualization and verified the effectiveness of the method in rolling bearing fault detection by simulation experiments. Wang et al. [9] proposed an improved extended Kalman filter (M-EKF) fault detection strategy and applied it to the fault detection of sea current turbine insulation system, and proved its excellent performance through simulation experiments. Singh et al. [10] proposed a data-driven fault diagnosis method based on time-frequency analysis and deep residual networks and applied it to the fault detection of planetary gearboxes, and the research results showed that the method has higher performance compared with other.
Unlike most detection methods, the study applies a genetic algorithm-based production knowledge base for mechanical fault detection. The application of genetic algorithms has been studied extensively by scholars. For example, Kumar and Parhi [11] applied a combination of genetic algorithm and regression technique to the navigation controller of a robot, and the high performance and feasibility of the method was demonstrated by simulation experiments. Liu et al. [12] proposed a linkage learning genetic algorithm based on hybrid genetic algorithm and applied it to the gas turbine engine minimum-maximum fuel controller performance optimization, and the experimental results show the feasibility and effectiveness of the method, which has better application performance compared with the traditional genetic algorithm. For the charging imbalance problem of electric vehicle battery pack, Sun et al. [13] proposed an innovative equalization strategy based on cluster analysis and genetic algorithm, and used the genetic algorithm in the optimization of classification results, and proved through a series of simulation experiments that the method can effectively improve the equalization speed and thus enhance the capacity of the battery pack. In order to effectively utilize urban space and natural resources, thus requiring optimization of transportation, etc., Krol and Sierpinski [14] applied genetic algorithm with fuzzy objective function to optimize the location of urban electric vehicle charging units, and the results of the study showed that it is feasible and can help in the effective utilization of resources. Zhibo et al. [15] proposed an integer-coded genetic algorithm based on individual reconfiguration and applied it to the optimization of Earth observation satellite imaging mission scheduling, and the results of the study showed that the method is efficient and reliable. Zhang et al. [16] applied a multi-island genetic algorithm to optimize the selective solar absorber configuration, and the study showed that it outperformed the traditional genetic algorithm with effective and robust performance for optimizing micro-nanostructures with manufacturability for thermal and energy applications. Mayer and Gróf [17] applied a genetic algorithm based on an integrated mathematical model to the techno-economic optimization of grid-connected photovoltaic power plants. The method can be used to facilitate the optimal design of commercial photovoltaic power plants and for research purposes, while allowing for future PV plant development trends are predicted. For the power loss problem in network reconfiguration, Nguyen et al. [18] applied continuous genetic algorithm to optimize the initial search point to reduce power consumption, and the experimental results showed the feasibility and effectiveness of the method.
Through the analysis of related studies, it is found that many scholars have designed many different methods for mechanical fault detection, and most of the studies are centered on deep learning and machine learning, and have achieved good results. However, there is less research on the application of genetic algorithm-based production knowledge base in fault detection, so the study evaluates the effectiveness of its application from this method.
Analysis of mechanical fault detection model based on genetic algorithm for production knowledge base
Genetic algorithm production knowledge base model construction
Genetic algorithm is a computer algorithm technique that imitates the laws of biological inheritance. It uses the principles of genetics to iteratively evolve the population of interest while searching multiple points of the solution space in order to find the global optimal solution [19]. The genetic algorithm has the characteristics of adaptability, intelligence and parallelism, etc. The adaptability of the genetic algorithm is reflected in the treatment of the optimization function, and for the calculation of the fitness, it can directly use the fitness function without solving the inverse of the optimization function. Its intelligence is reflected in the solution of complex problems, while parallelism is reflected in genetic computation [20]. Therefore, these features make it well suited for use in mechanical fault detection. The genetic algorithm flow is shown in Fig. 1.
Flow chart of genetic algorithm.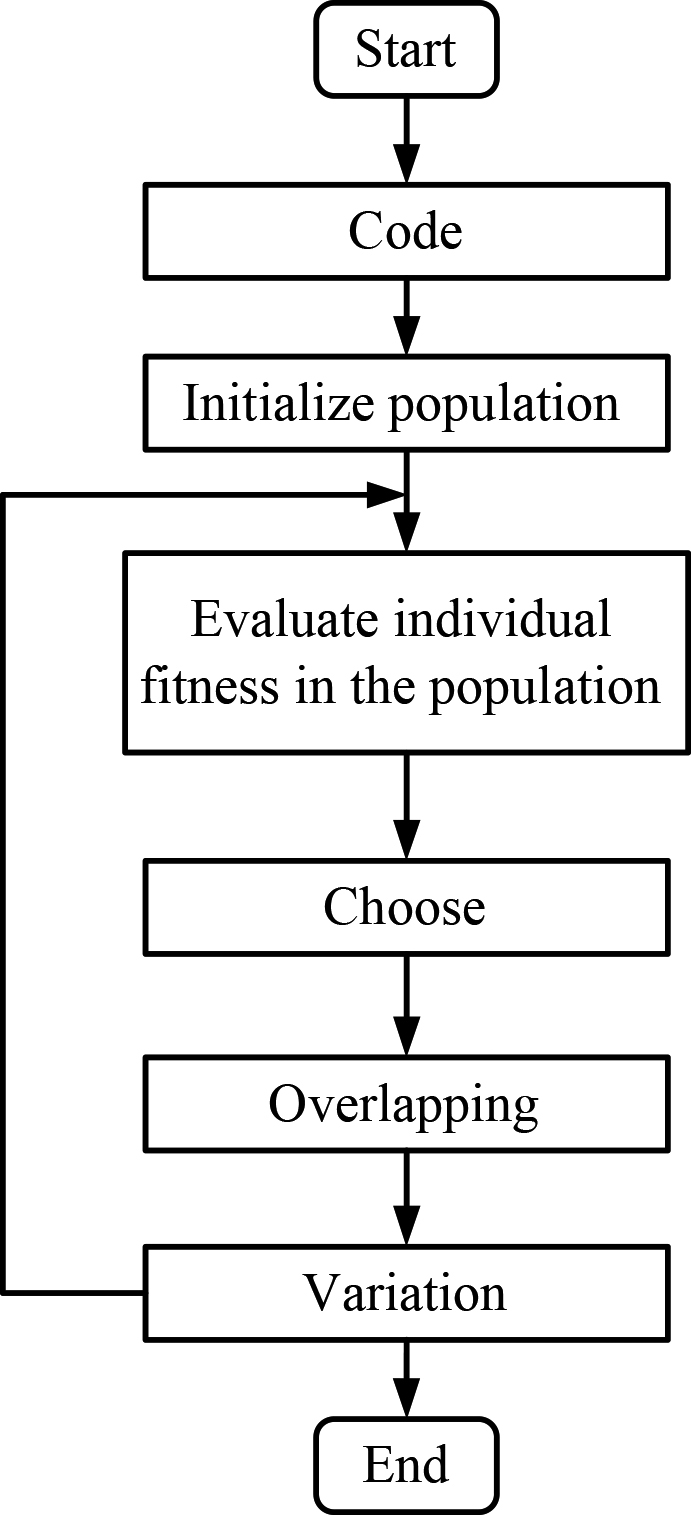
As can be seen from Fig. 1, selection, crossover and variation are the 3 main operators of the genetic algorithm. In the operation process of genetic algorithm, non operator data is first converted into data suitable for genetic algorithm, which is called encoding. The encoding is usually done in a binary way, i.e., each data is represented in the encoded form of 0 and 1. First, the range of values of a certain set of solutions is defined as
In Eq. (1),
In Eq. (2),
Equation (3) for the conversion of binary code to Gray code, and conversely, Gray code to binary code as shown in Eq. (4).
In Eqs (3) and (4),
In Eq. (5),
In Eq. (6),
In Eq. (7),
Schematic diagram of multiple point intersection.
Single-point crossover is the exchange of data between two individuals at the same location, and similarly, double-point crossover and multi-point crossover are the exchange of data at two or more points. The latter is an improvement of single-point crossover, which can provide better results. In addition, there are mutations of the operator in the process of genetic algorithm, which aims to generate new adaptations. There are various ways of variation, among which the low variation occurs in the low position, which can improve the local search ability of the algorithm. Once the above process is completed, the key operations of the genetic algorithm are completed.
In mechanical fault diagnosis, there are various hypotheses, and each hypothesis generates many paths, thus consuming much time in dealing with these path problems. In order to speed up the diagnosis, an efficient detection method is often needed, and thus the use of genetic algorithms for their diagnosis is investigated. Mechanical fault detection is a special kind of pattern classification problem, which requires a large number of feature parameters for its identification due to the complexity of the detection process [21]. However, in practical conditions, there is a certain correlation between the feature parameter vectors, as well as differences in their sensitivity when performing fault detection, so they can affect the detection effectiveness of the relevant methods. In practical applications, the feature parameter vectors need to be optimized, and the genetic algorithm used in the study has a good optimization effect on them, so the algorithm can be well applied to mechanical fault detection. In mechanical fault detection, the common feature parameters are: waveform rate, skewness, cliffness, wave height rate, maximum ratio, rate of change of great values, rate of change of very small values, and mean of square root, which are defined as
Tree structure of genotype.
Figure 3 shows the tree diagram representation of genotypes, and Fig. 3a and b show the tree diagrams of two formulas, respectively. In particular, Fig. 3a is shown in Eq. (8).
In Eq. (8),
In Eq. (9),
Structural map of genotype crossover and variation.
In Fig. 4, Fig. 4c and d correspond to the crossover of genotypes, with node 1 as the critical condition, and all branches that are below this node are exchanged with each other, thus completing the crossover process. Among them, the expression of Fig. 4c is shown in Eq. (10).
Similarly, the expression of Fig. 4d is shown in Eq. (11).
Two genotypes will exhibit certain probability characteristics when crossed, and their expressions are shown in Eq. (12).
In Eq. (12),
Similarly, the expression corresponding to Fig. 4f is shown in Eq. (14).
As can be seen in Fig. 4, the variation corresponds to a change in the operator or feature parameter, the probability of which is usually determined empirically. Finally, it is necessary to define the fitness function, which characterizes the superiority of each individual, and its expression is shown in Eq. (15).
In Eq. (15),
In the practical application of the genetic algorithm model, its fitness function and iteration error change with the number of iterations. The variation curves of the two with the number of iterations are shown in Fig. 5.
Fitness evolution curve and iteration error curve of genetic algorithm.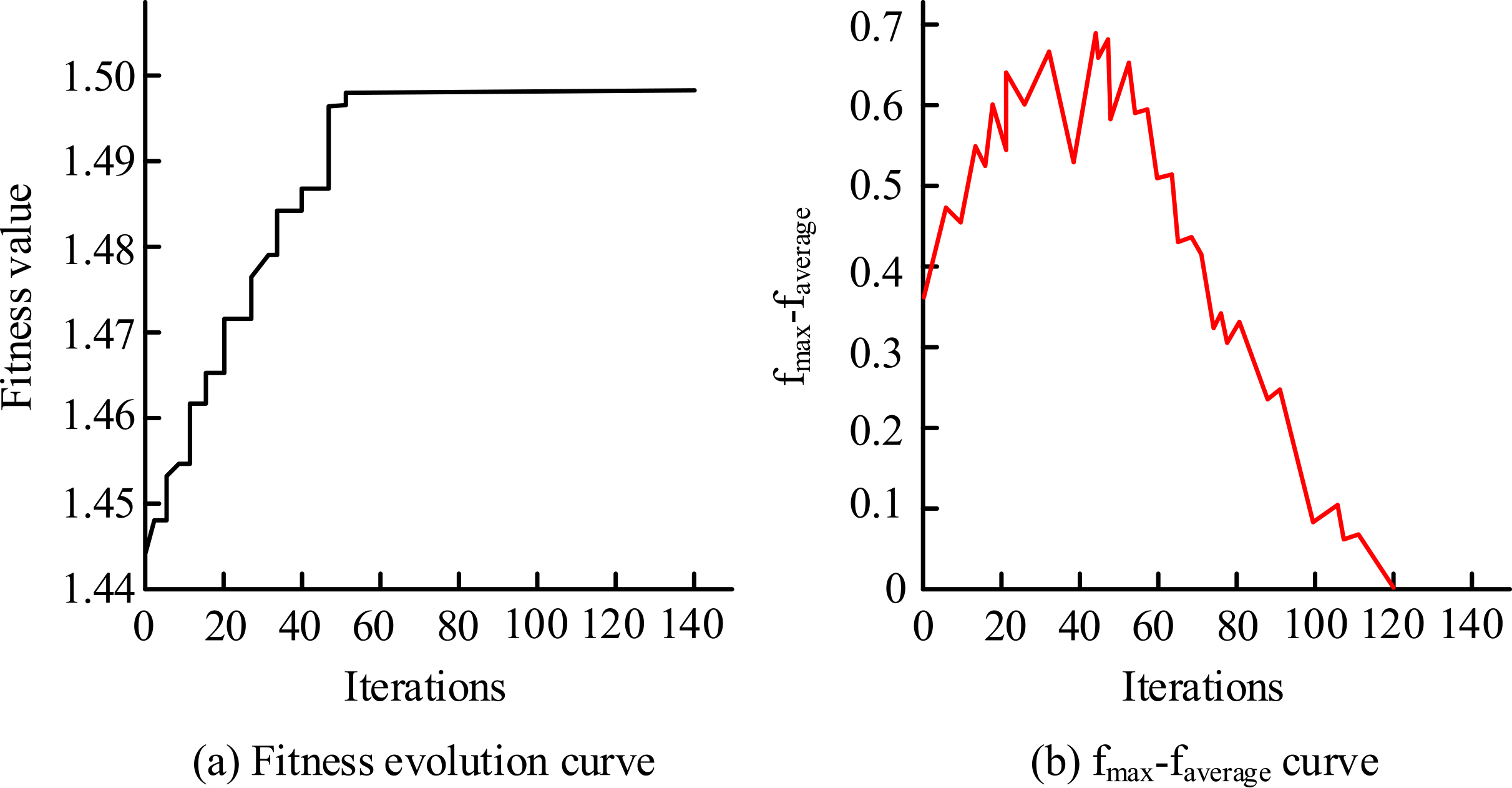
As can be seen from Fig. 5, the genetic algorithm fitness function starts to converge when the number of iterations is 50. Meanwhile, its error decreases when the number of iterations increases. It indicates that it can guarantee a small error while improving the computational efficiency and can be applied to mechanical fault detection. There are various methods and corresponding models in mechanical fault detection. To evaluate and analyze the performance of the genetic algorithm proposed in the study in diagnosis, several other diagnostic models of the same type are introduced: namely, the support vector machine (SVM) model, the linear discriminant analysis (LDA) model, the random forest (RF) model, and the K-nearest neighbor (KNN) model. Each model is simulated in the same experimental environment and the accuracy comparison is shown in Fig. 6.
Comparison of precision of different models.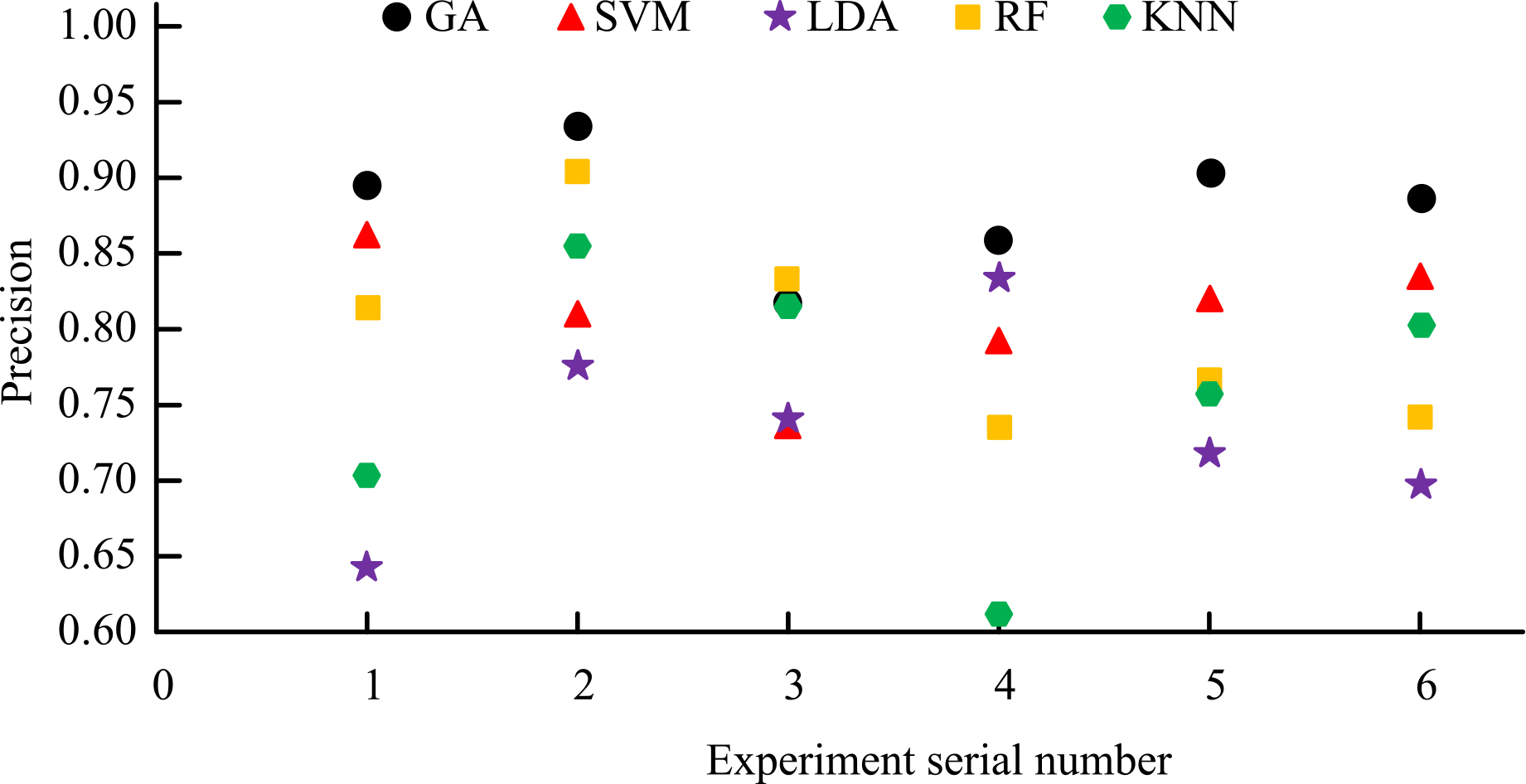
Figure 6 shows the accuracy comparison of the five algorithm models in the six mechanical fault diagnosis experiments. As can be seen from the figure, the accuracy of the five algorithm models fluctuates somewhat in different experiments. Among the six experiments, the average accuracy of the genetic algorithm model is 0.883; the average accuracy of the support vector machine (SVM) model is 0.808; the average accuracy of the linear discriminant analysis (LDA) model is 0.735; the average accuracy of the random forest (RF) model is 0.799; and the average accuracy of the K-nearest neighbor (KNN) model is 0.758. From this, it can be seen that genetic algorithm model has the highest average accuracy for mechanical fault diagnosis, indicating that it possesses better diagnostic effect. To verify the computational stability of the genetic algorithm, the sample set was sampled 50 times consecutively using random sampling. In this case, 40% of the extracted samples were used as the test set and the remaining 60% as the training set, thus comparing the five different algorithm models for training, and the results after training are shown in Table 1.
Comparison of training results of five algorithm models
As can be seen from Table 1, the training results on the training set show that the GA algorithm model training has the highest accuracy and the lowest accuracy. The average accuracy of the GA algorithm model is 0.924, which is 0.171 higher than the SVM algorithm model, 0.176 higher than the LDA algorithm model, 0.053 higher than the RF algorithm model, and 0.138 higher than the KNN algorithm model. 0.024; lower than the RF algorithm model by 0.016; and lower than the KNN algorithm model by 0.031. A comparison of the times of the five algorithms during training and testing is shown in Fig. 7.
Time comparison of five algorithm models on training set and test set.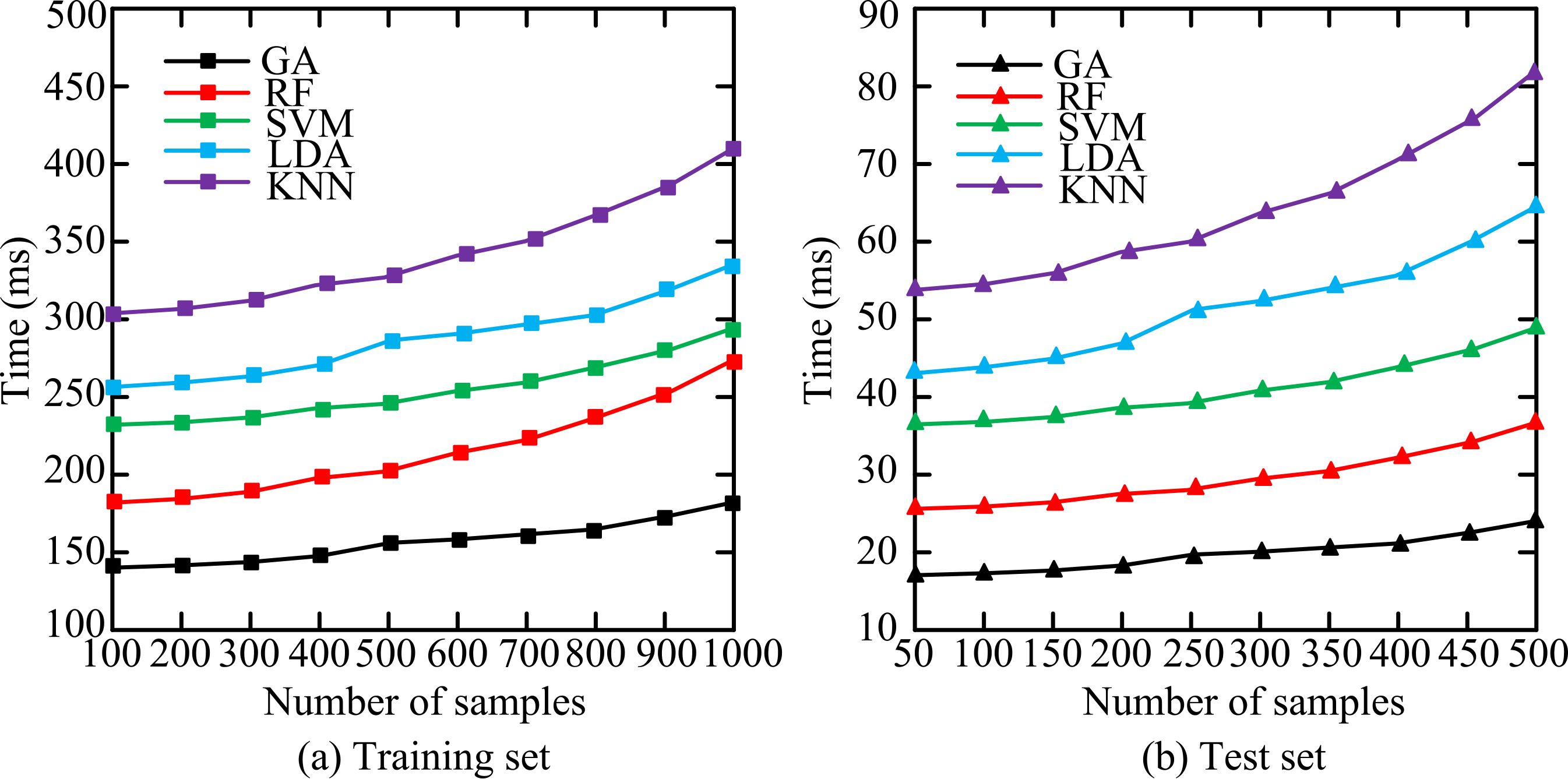
Figure 7a shows the training time comparison of the five algorithms on the training set, and Fig. 7b shows the training time comparison of the five algorithms on the test set. From Fig. 7a, it can be seen that among the five algorithm models, the GA algorithm model has the shortest average training time with a value of 152 ms, which is 49 ms lower than the RF algorithm model; 89 ms lower than the SVM algorithm model; 127 ms lower than the LDA algorithm model; and 181 ms lower than the KNN algorithm model. Similarly, from Fig. 7b, it can be seen that among the five algorithm models, the GA algorithm model has the shortest average test Therefore, the average training time and the average testing time of the GA algorithm model are shorter than the other four algorithm models, which means that its convergence speed is faster and higher efficiency. The ROC curves of the five algorithm models are compared, as shown in Fig. 8.
ROC curve comparison of five algorithm models.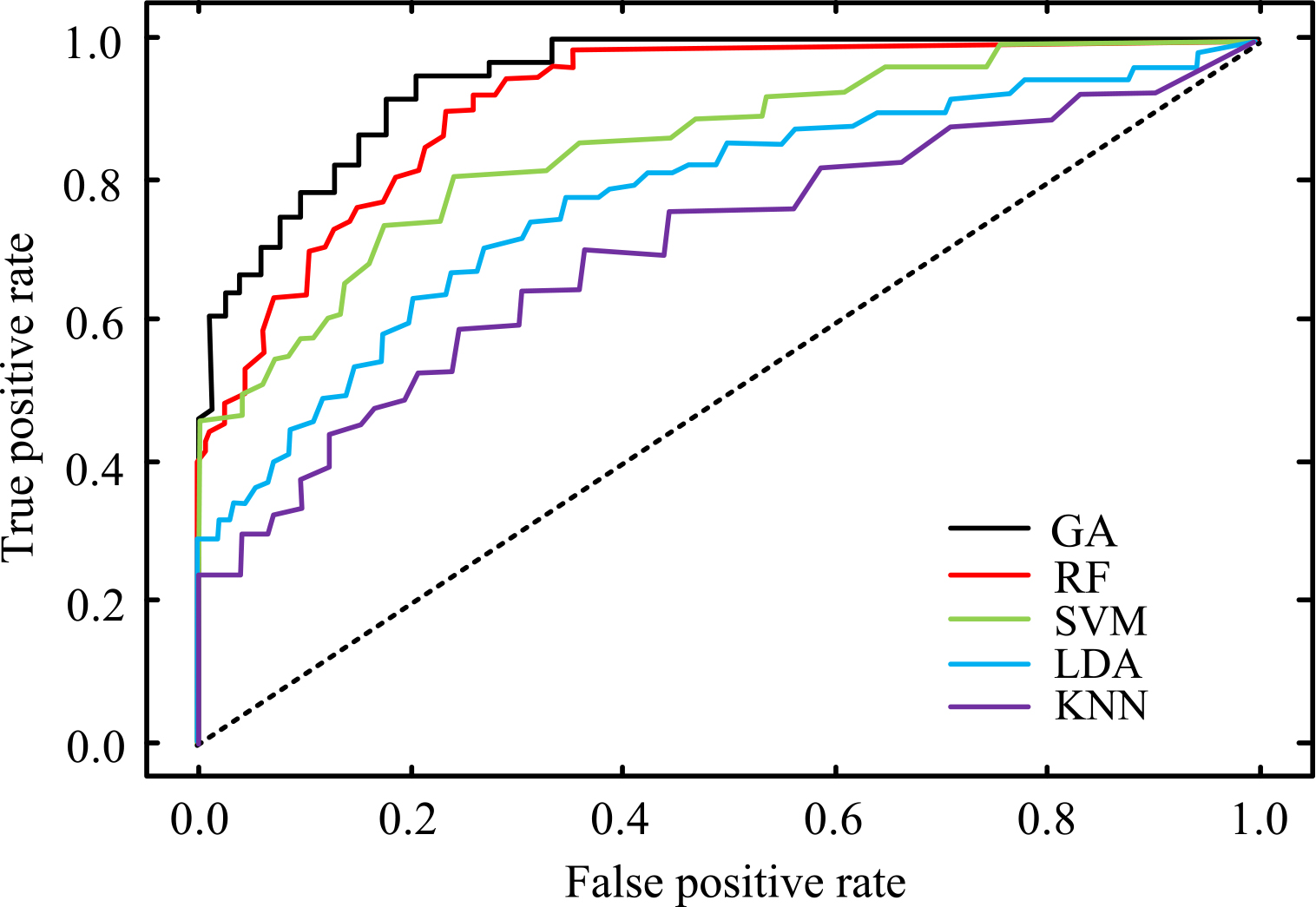
As can be seen from Fig. 8, the GA algorithm model has the largest area under the ROC curve, i.e., the largest AUC value, which is 0.935, 0.032 higher than the RF algorithm model; 0.074 higher than the SVM algorithm model; 0.118 higher than the LDA algorithm model; and 0.166 higher than the KNN algorithm model. it is clear from the comparison that the GA algorithm model has the best mechanical fault diagnosis. Finally, the changes of error values of the five algorithm models with the number of iterations are analyzed, and the results are shown in Fig. 9.
Variation of error value of five algorithm models.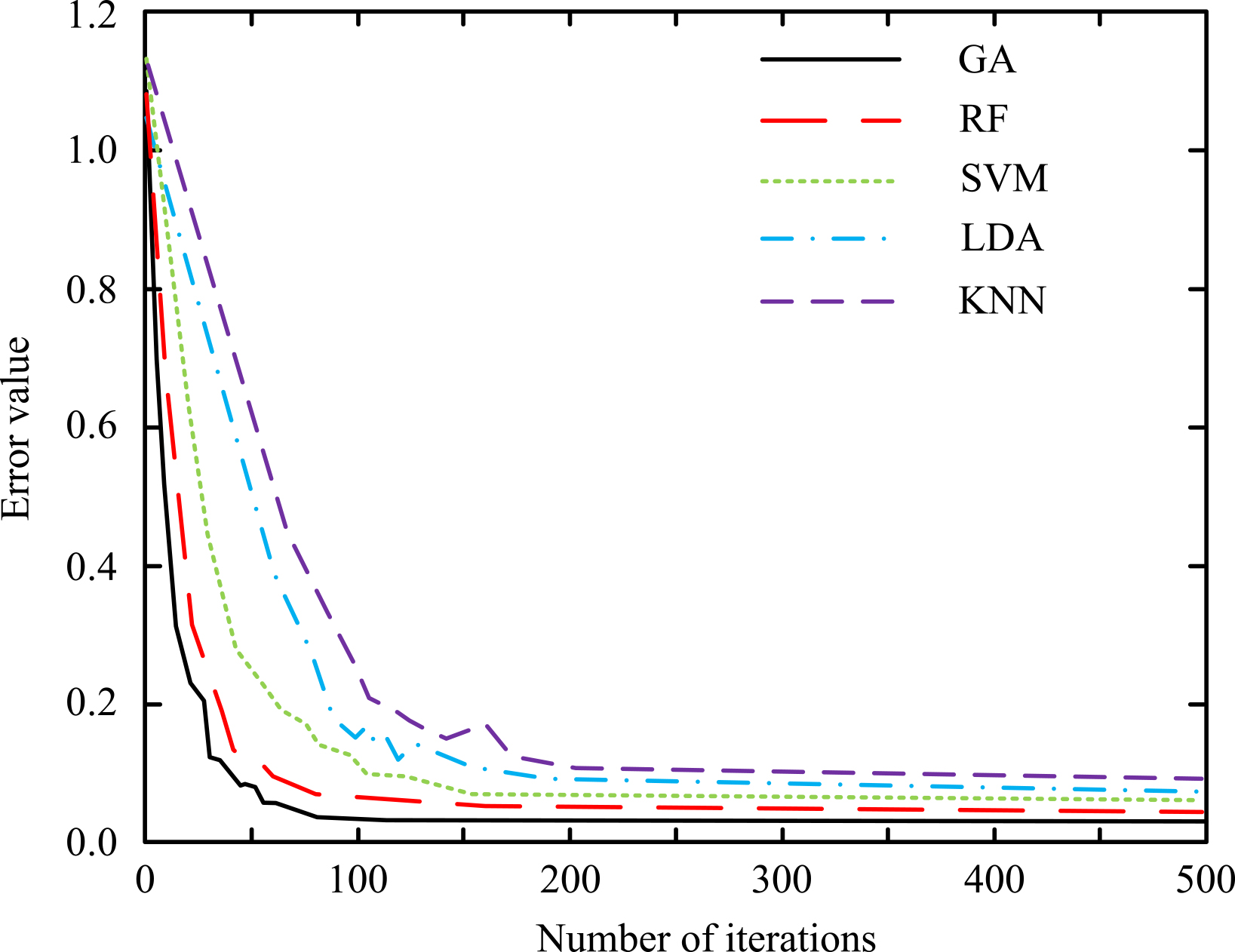
From Fig. 9, it can be seen that the error values of the five algorithm models gradually decrease and stabilize as the number of iterations increases. When the number of iterations reaches 80, the error value of the GA algorithm model decreases to the lowest and stabilizes, and its value is 0.028, which is 0.021 lower than that of the RF algorithm model; 0.043 lower than that of the SVM algorithm model; 0.055 lower than that of the LDA algorithm model; and 0.074 lower than that of the KNN algorithm model. The training time, detection time and error value are smaller than the other four algorithm models, which indicates that the genetic algorithm has high efficiency and good performance in mechanical fault detection.
Comparison of transformer mechanical fault identification results
Taking the substation mechanical fault as an example, the GA, RF, SVM, LDA and KNN algorithms selected in this paper are used to carry out experimental verification on various common faults in the substation. The results are shown in Table 2. It can be seen from the table that the fault detection accuracy of GA algorithm fluctuates around 92.00%, which is the highest among the five models. Then observe the convergence algebra of the five models. Only the convergence algebra of GA algorithm is about 10, and the others are higher than GA algorithm. This shows that GA algorithm has the fastest convergence speed among these models. In conclusion, the experiment verifies that GA algorithm has obvious advantages in the accuracy and detection performance of mechanical fault identification.
In mechanical fault detection, an efficient and accurate detection method can effectively save time and cost, thus reducing production losses. The study analyzes and evaluates the effectiveness of a genetic algorithm-based production knowledge base in mechanical fault detection. The results show that the genetic algorithm fitness function starts to converge when the number of iterations is 50. Meanwhile, its error decreases when the number of iterations increases, indicating that it can be applied to mechanical fault detection as it can ensure a small error while improving the computational efficiency. The average accuracy of the five algorithm models in the six mechanical diagnosis experiments was 0.883 for the genetic algorithm model, which was higher than that of the other four algorithm models. In the training and testing of the sample set, the GA algorithm model has the shortest average training time and testing time, 152 ms and 20 ms, respectively. in the ROC curve comparison, the GA algorithm model has the largest AUC value of 0.935, which is 0.032 higher than the RF algorithm model; 0.074 higher than the SVM algorithm model; 0.118 higher than the LDA algorithm model; and 0.166 higher than the KNN In the error analysis, when the number of iterations reaches 80, the error value of the GA algorithm model is minimized and stabilized with a value of 0.028, which is 0.021 lower than the RF algorithm model; 0.043 lower than the SVM algorithm model; 0.055 lower than the LDA algorithm model; and 0.074 lower than the KNN algorithm model. comprehensive analysis shows that the genetic algorithm has a higher mechanical fault detection has high efficiency as well as good performance. However, there are still some shortcomings in the study, such as the genetic algorithm can be optimized in various ways, so as to further improve the detection effect.
Footnotes
Funding
The research is supported by: Characteristic innovation projects of colleges and universities in Guangdong Province in 2021 (No. 2021KTSCX268); Tertiary Education Scientific research project of Guangzhou Municipal Education Bureau (No. 202235310).