
Abstract
Direct-drive permanent magnet wind turbine has high power generation efficiency, especially in low wind speed environment, and is widely used for wind power generation. Direct-driven permanent magnet wind turbines show no inertia response to the system through the grid connection of full-power converters, resulting in increased frequency fluctuation, poor response effect and reduced stability time of the system under sudden load and sudden wind speed conditions. Based on this, an inertia control method of direct-drive permanent magnet wind turbine under high wind power penetration is proposed, and the model of direct-drive permanent magnet wind turbine is built by designing functional modules to improve the synchronous control effect under high wind power penetration. The vector control calculation method is used to design the virtual inertia control parameters, and the decoupling quantity is introduced to decouple the parameters with filter inductance, so as to improve the supporting capacity of power grid frequency fluctuation. The simulation results show that the proposed method has a fast frequency response under sudden load change, and it drops to the lowest value of 49.16 Hz at 12.14 s. Under the condition of sudden change of wind speed, the system frequency rises to the highest value of 50.38 Hz at 12.94 s. It is proved that the proposed method has a certain suppression effect on the amplitude of frequency change, effectively shortens the time for the system frequency to return to steady state, and thus has more advantages.
Keywords
Introduction
Wind power generation has already received extensive attention because of its clean, pollution-free and safe characteristics. Wind turbines are usually connected to the power grid in the form of maximum power point tracking operation and do not undertake relevant frequency modulation tasks, resulting in the lack of frequency modulation capacity of the power grid and endangering the frequency stability of the power system. Considering the mismatch between wind energy resources and economic foundation in China, and the continuous increase of wind turbine capacity and total installed capacity of wind farms, wind power generation must get rid of the previous power generation form of integrating distributed energy into the power system nearby and change to a new power generation mode of integrating wind farms and wind power clusters into the high-voltage power grid for long-distance transmission [1]. Large scale wind farms not only have strong randomness, discontinuous energy and uncertain fluctuation range, but also the flexible grid connection of high-permeability wind turbines does not have the ability to provide inertia support, which leads to the lack of system inertia and the lack of stability of power grid frequency [2, 3]. The lack of inertia and damping will cause greater frequency modulation pressure to the synchronous generator, such as voltage fluctuation, current impact and frequency instability [4].
In order to implement the guiding plan of the national energy layout and the sustainable development of wind power generation, it is urgent to solve the non-negligible problems brought by high wind power penetration to power grid stability and dispatching. Direct drive permanent magnet wind turbine has the advantages of high wind energy utilization and low maintenance cost. Direct-driven permanent magnet wind turbine has a simple and compact structure, which greatly improves the reliability of the whole machine, and the availability of the unit is high, thus increasing the power generation of the unit. By effectively controlling the inertia of the direct-drive permanent magnet wind turbine, the transmission efficiency can be effectively improved, the failure rate of the wind turbine can be reduced, and at the same time, the operation of the wind turbine can be completed under the condition of low rotating speed, thus optimizing the operation conditions of the wind turbine, prolonging the operation life of the wind turbine and further improving the reliability of the whole machine. On the other hand, China’s low wind speed resources account for a relatively high proportion, and the direct drive wind turbine has better operation characteristics than the doubly fed fan at low wind speed. Therefore, this paper studies the inertia control method of direct drive permanent magnet wind turbine under high wind power permeability, which provides a new research idea for the active support control.
Inertia control method of direct drive permanent magnet wind turbine under high wind power permeability
Construction of direct drive permanent magnet wind turbine model
Direct drive permanent magnet wind turbine is mainly composed of wind turbine, permanent magnet synchronous generator, power electronic converter and other modules. The wind turbine module uses Aspose series controls to process the data of DC bus voltage controlled by the grid side, power or speed controlled by the machine side, and provides multi-information data support for the power system through data uploading. The permanent magnet generator module adopts PIC18F4520 chip to design Jscript script code, and integrates the voltage and frequency data according to some data of generator, rectifier, inverter (double pwm control), power grid control and display, which effectively reduces the maximum power tracking pressure of fan. The electronic converter module uses Java programming language to design the double closed-loop control program of speed and current, and establishes MySQL basic database to complete the decoupling of flux linkage, so as to ensure the stable output speed of generator. The specific model diagram of direct-drive permanent magnet wind turbine is shown in Fig. 1.
Model diagram of direct-drive permanent magnet wind turbine.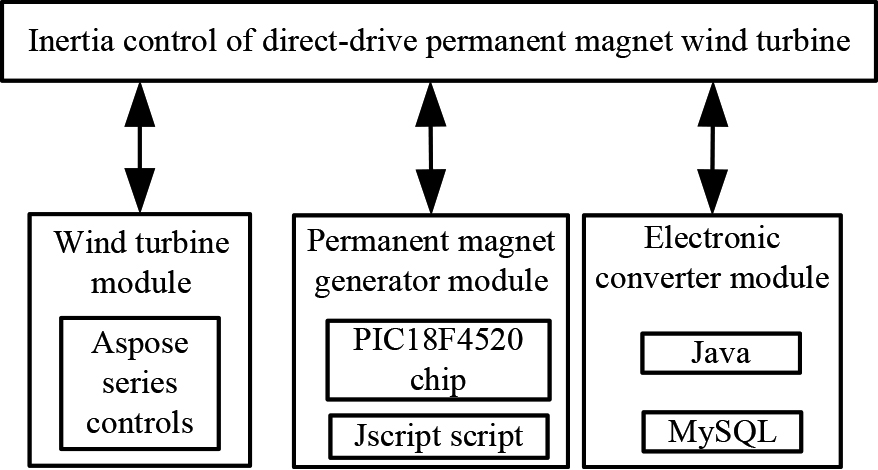
The wind turbine absorbs the wind energy blowing through the blades and drives the synchronous generator in the form of mechanical power. The wind wheel of direct drive permanent magnet wind power system is directly coupled with the permanent magnet machine, removing the gearbox with noise source, high failure rate and high maintenance cost. Considering the characteristics of China’s wind energy resources, the permanent magnet motor can be better matched with the wind wheel. The synchronous generator will output electromagnetic power and flow into the generator side converter. The voltage and frequency regulation of electric energy is carried out through the grid side converter to make it meet the grid connection conditions of the power grid and finally connected to the power grid. The airflow cooling system is adopted in the engine room and tower without additional cooling system. At the same time, because the gearbox is omitted, the cost and maintenance cost are reduced due to its simple structure and low failure rate, which is more conducive to development from the perspective of economy [5, 6]. Due to the different equivalent modes of transmission shaft, the common structure from simple to complex can be divided into three models: single mass block, two mass block and three mass block. This paper adopts the transmission system model of two mass blocks. When the wind speed changes, the wind turbine will adjust to a corresponding speed to maximize the conversion efficiency of wind energy. That is, the concept of optimal tip speed ratio is used to control the power output of the wind power system to run on the maximum power point tracking curve. The power electronic converter device in the rectifier and inverter system can realize the decoupling control of active/reactive power and the controllable regulation of frequency output. At the same time, it has the advantages of low harmonic component, good low voltage ride through effect and strong adaptability to power grid disturbance. The grid connection characteristics fully meet the international standards [7]. In order to simplify the analysis, the following assumptions need to be made for the synchronous machine model: the model is a hidden pole machine; Ignore the leakage flux of the generator and the rotor damping winding; Magnetic saturation and eddy current loss of iron core are not included; The generator convention is adopted, and the three-phase stator windings are symmetrically distributed. This paper discusses the three-phase three wire system. The generator has no neutral line. The d-axis voltage mathematical model of PMSG on flux linkage and inductance can be expressed as:
In Eq. (1),
In Eq. (2),
In view of the fluctuation and uncertainty of wind turbine output power, power system frequency and rotor speed decoupling, electromagnetic system and mechanical decoupling, the generator side converter system and grid side converter can be designed independently, which improves the stability of wind turbine operation.
In case of frequency fluctuation caused by active power imbalance in the system, due to the coupling of mechanical and electromagnetic characteristics of the synchronous generator, the rotor speed of the synchronous generator can respond to the system frequency change and compensate the active power difference in the system by using the kinetic energy stored in the motor rotating elements [9]. The magnetic energy and electric energy in the circuit are mutually converted to generate a kind of energy, which will correspondingly generate active power, occupying the capacity of the power grid and the capacity of the transformer. Therefore, the ability of electric energy to do work can be improved by establishing electric magnetic field to compensate active power. The direct drive wind turbine is connected to the power grid through the full power converter, which cannot actively provide inertial support for the system, so it is necessary to generate large frequency modulation inertia in the wind turbine. Virtual inertia control adjusts the active power output of wind turbine according to the change rate of system frequency. Inertia is very important to the frequency stability of power system. Large inertia can effectively prevent the sudden change of power grid frequency, so that the synchronous generator has the time and ability of primary frequency regulation [10]. Traditional doubly-fed wind turbines are old and have a high failure rate, which leads to serious power failure in wind farms. At the same time, the decoupled stator winding of the power grid is directly connected to the power grid, so it doesn’t have the ability to provide inertia support to the power grid like a synchronous machine, and can’t respond to the change of the power grid frequency.
In order to further study the frequency support effect of wind power system under high permeability, it is necessary to establish the frequency response model of conventional thermal power system. The model of thermal power unit can be ignored and the structure can be simplified. As shown in Eq. (3), the power and frequency in the formula are unit values.
In Eq. (3),
The direct drive permanent magnet wind turbine is connected to the power grid through back-to-back full power converter, and its mechanical system is decoupled from electromagnetic system, rotor speed and system frequency. When the system frequency fluctuates, the direct drive permanent magnet wind turbine does not have the inertia response ability of synchronous generator and basically does not contribute to the system inertia. Wind power penetration rate refers to the penetration level of wind power at each moment in the power system. The ratio of real-time wind power to load in power system is defined as wind power penetration rate. With the increase of wind power penetration in the power system, it will even greatly reduce the total inertia of the power system. The primary frequency modulation of inertial control mainly simulates the active power frequency droop characteristics of traditional synchronous generator. According to the change of system frequency, the output of the generator can be changed according to the sag curve. This makes the active power output of inertial control actively and adaptively adjust with the change of power grid frequency, so as to provide necessary active support for power grid [12, 13]. The core idea of virtual inertia of wind turbine is to use the “hidden” kinetic energy in the rotating element of wind turbine to simulate the coupling between synchronous generator speed and system frequency, which has the characteristics of inertial response, so as to obtain the equivalent inertial support ability of synchronous generator to power system [14]. The “hidden” kinetic energy of wind turbine is divided into mechanical energy provided by wind turbine and electric energy provided by generator, which can improve aerodynamic efficiency, reduce structural load and realize grid-connected output of electric energy generated by wind turbine.
The virtual inertial control link can produce large active power output and prevent the rapid change of frequency. When the system frequency starts to recover, the system frequency change rate changes from negative value to positive value, and the active power output of the virtual inertia control link will change to negative value, resulting in that the active power output of the wind turbine after the frequency change is less than that before the frequency change [15]. For the voltage source VSG, the control strategy makes it have the same port characteristics as the traditional synchronizer, and can actively simulate the inertia and frequency modulation function of the traditional synchronizer. This process actively participates with the change of the grid connected port, so as to actively support the port voltage and frequency [16]. In order to realize the virtual inertia control of direct drive permanent magnet wind turbine, the control link related to the system frequency can be introduced into the back-to-back full power converter system, so as to add the virtual power increment to the active power reference value, as shown in Eq. (4).
In Eq. (4),
In Eq. (5),
When the damping coefficients of power grid and wind turbine remain unchanged, the power deviation is positively correlated with the frequency change rate and virtual inertia coefficient. When the differential coefficient increases, the frequency change caused by power deviation will be reduced accordingly in theory. The grid side control keeps the conventional vector control unchanged. The control includes the inner loop of inductance current and the outer loop of DC voltage at the grid side to maintain the stability of grid side current and DC voltage [19]. Voltage outer loop is a control strategy in PWM rectification, which belongs to the feedback description of hysteresis current control of direct current control. The purpose of the voltage outer loop is to keep the sum of the sampled output voltage and the input voltage effective, and realize the bidirectional doubly-fed control of the voltage. VSG is a control algorithm that embeds the mathematical model of the direct-drive permanent magnet wind motor into the inverter. By simulating the primary frequency modulation and voltage regulation of the direct-drive permanent magnet wind motor, it has the functions of damping the rapid fluctuation of voltage and frequency, automatic power distribution and synchronous power grid operation. The existence of voltage outer loop makes VSG have the port characteristics of synchronous voltage source. The PI controller can quickly respond to the change of voltage, and then the reference value of current inner loop can be obtained after decoupling control:
In Eq. (6),
In Eq. (7),
Simulation environment
Power Analysis Toolbox simulation software is a kind of power system analysis software based on Matlab platform, which can provide a very useful graphical user interface and editor of single-line diagram of power system, and can conveniently perform power flow calculation, continuous power flow, optimal power flow, time domain simulation, etc. The simulation software can give various numerical simulation results and simulation graphs, which is convenient for analysis and research. The IEEE 30-bus system is simulated by simulation software. The system consists of 2 generators, 3 branches and 11 loads. The voltage standard value of each generator is set to 1.05 p.u.
Parameter setting of simulation experiment
The virtual inertia simulation system of direct drive permanent magnet wind turbine is established in PSCAD/EMTDC environment. In the simulation software, the models including wind turbine, permanent magnet synchronous motor, dual PWM converter system, power grid equivalent frequency modulation synchronous generator and variable load are built. The power grid is simulated by 2 MW synchronous generator, and the frequency change of the power grid is simulated by switching the load of synchronous motor. Specific parameters are shown in Table 1.
Parameters of direct drive permanent magnet synchronous power generation system
Parameters of direct drive permanent magnet synchronous power generation system
In the process of steady-state operation, 10% active load is added to make the frequency of the system fluctuate. In order to make the frequency change more obvious than the low permeability after adding the proportion load, the wind power permeability under rated state is set as 60%. In the simulation, the wind speed is constant at 20 m/s, the load drop makes the frequency fluctuate downward in 10 s, and the load returns to its original state in 20 s to make the frequency fluctuate upward. The initial value of variable load is 100 MW. The output voltage of the wind turbine is boosted by two-stage transformers and connected to the power grid. According to the above simulation model, the simulation verification under different working conditions is carried out.
Firstly, verify the system support capacity under sudden load change. The wind speed remains unchanged to avoid other unknown interference factors to the system caused by the change of wind speed. Under the rated wind speed, the switch is closed when it operates stably for 10 s, and the load step drops by 10 MW. The inertia control method of direct drive permanent magnet wind turbine proposed in this paper is set as the experimental group, and the control methods based on phase locked loop (PLL) and traditional MPPT are set as the control group. Observe the changes of the system under different control strategies. The response curve of system frequency under the condition of sudden change of steady-state wind speed load is shown in Fig. 2.
Response curve of system frequency under sudden load change condition.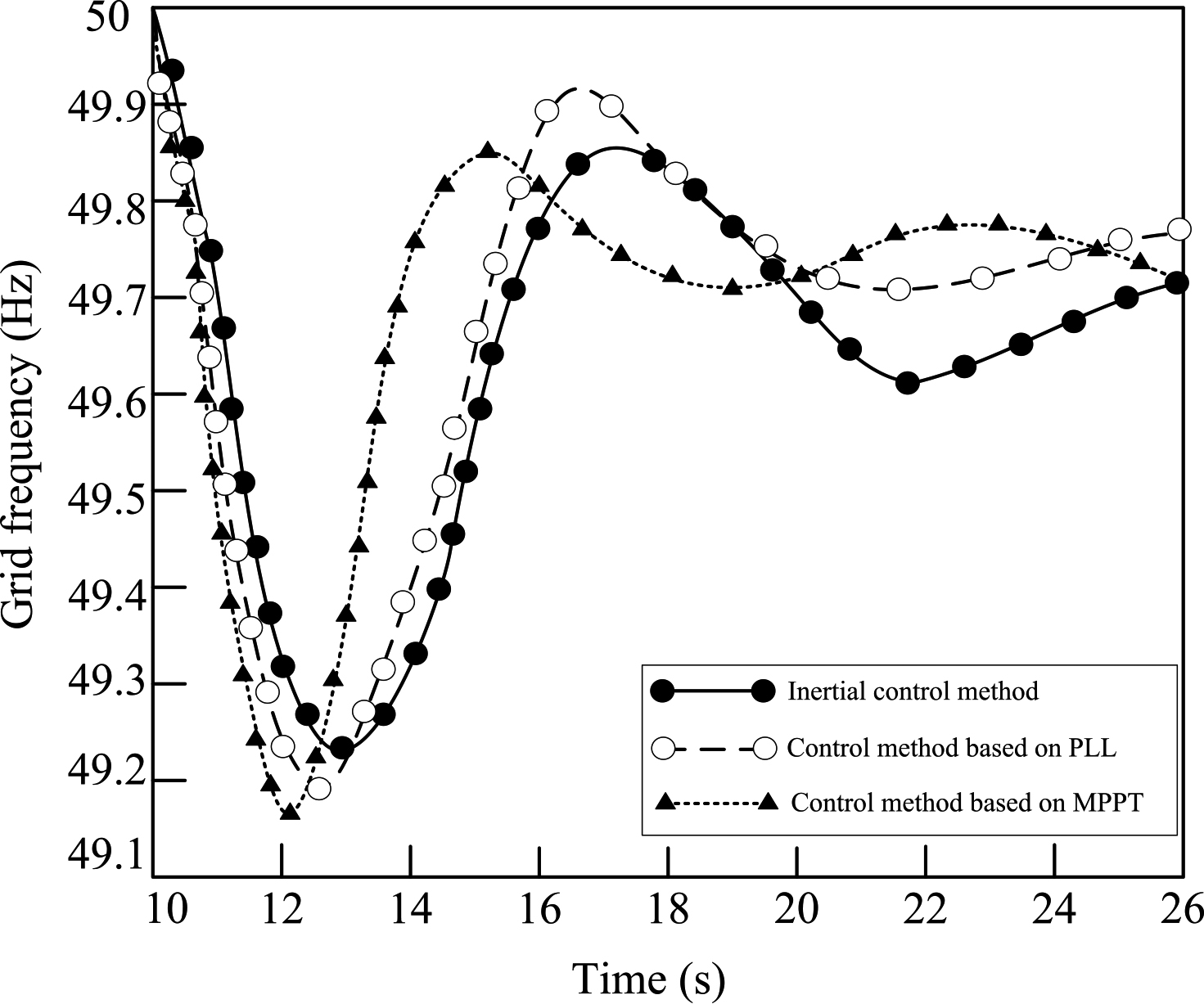
Through the simulation waveform, it can be clearly seen that different control strategies play different roles in the active support of the system. The three inertia control methods of direct drive permanent magnet wind turbine can support the frequency of the system. However, at the moment after the change, the inertial control method proposed in this paper shows greater active support ability than the control methods based on PLL and MPPT. As shown in Fig. 2, when the direct drive permanent magnet wind turbine uses the PLL control strategy, the system frequency drops to the lowest value of 49.16 Hz at 12.14 s. When using the control strategy of MPPT, the system frequency drops to the lowest value of 49.92 Hz at 12.35 s. Based on inertia control, the wind turbine has certain inertia response ability, and the system frequency drops to 49.28 Hz at 13.08 s. By comparing different control strategies, it can be seen that the inertial control method not only effectively suppresses the amplitude of frequency change, but also shortens the time for the system frequency to return to steady state. The inertia control method improves the damping of the system and buys time for the next primary frequency modulation. This is because the model of direct-drive permanent magnet wind turbine is built, and the response effect of system frequency under sudden load change is optimized through the coordination among wind turbine module, permanent magnet synchronous generator module and power electronic converter module.
Then, the system support ability under sudden change of wind speed is verified. The variable load remains unchanged to avoid other unknown interference factors to the system caused by the change of active load. When it operates stably to 10 s, the wind speed step increases by 2 m/s. The response curve of system frequency under different wind speed changes is shown in Fig. 3.
Response curve of system frequency under sudden change of wind speed.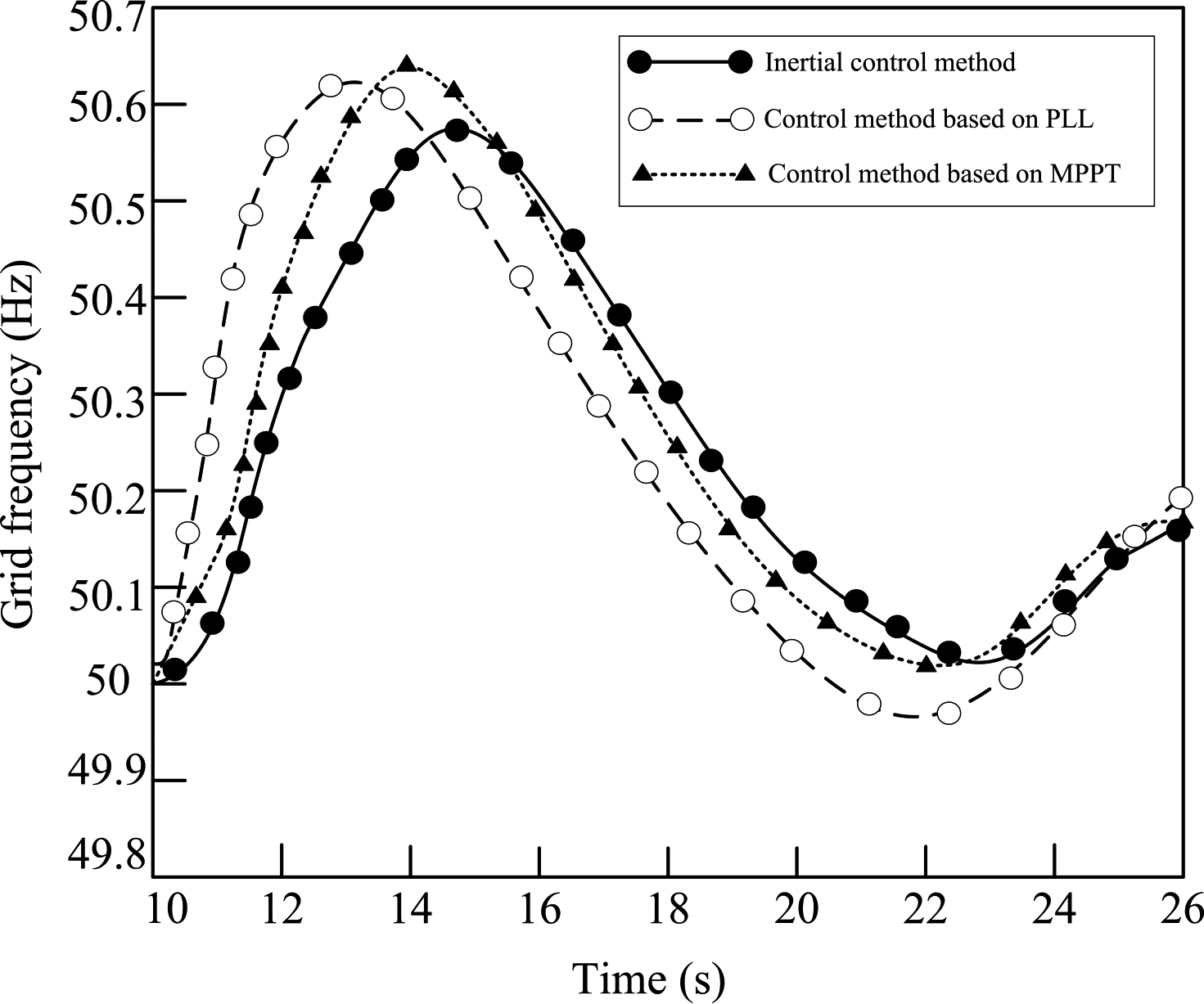
As shown in Fig. 3, when the direct drive permanent magnet wind turbine uses the PLL control strategy, the system frequency rises to the highest value of 50.38 Hz at 12.94 s. When using the control strategy of MPPT, the system frequency rises to the maximum value of 50.45 Hz at 14.72 s. Based on inertial control, the wind turbine has certain inertial response capacity, and the system frequency increases to 50.71 Hz at 15.12 s. The inertial control method proposed in this paper has a good inhibitory effect on the sudden change of frequency. Especially in a few seconds after the change of wind speed, the change of system frequency is more slow, the amplitude of frequency rise is reduced, and the influence of wind speed change on system frequency fluctuation is reduced. This is because the decoupling quantity is introduced to decouple the parameters including filter inductance, which changes the impedance of virtual stator winding, improves the frequency of D-axis voltage and D-axis current of direct-drive permanent magnet wind motor, and provides dynamic support in the process of power grid frequency fluctuation. Therefore, when the system frequency fluctuates due to the change of system active load or the change of wind speed, the inertia control method of direct drive permanent magnet wind turbine can respond to the change of system frequency and play a significant supporting role in the rapid recovery of the system.
With the increase of wind power penetration in the power system, the great challenges brought by wind turbines to the safe operation and dispatching control of the power system have become the bottleneck and difficult problem for the development of wind power. In this paper, the inertia control strategy of direct drive permanent magnet wind turbine is studied. It is committed to solving the problem that the permanent magnet direct drive wind turbine shows no inertial response to the system through the grid connection of full power converter, resulting in the decline of system frequency stability. After testing, the control method can effectively solve the problem of insufficient inertia of power system after large-scale wind power access, and then improve the ability of the system to maintain frequency stability. The supporting ability of this control strategy in power system with mixed energy such as wind, light, water and nuclear is worthy of in-depth discussion. However, due to the limited time and research conditions, the interaction range of multi-machine is not wide enough, and the results still have limitations. For example, this study only uses IEEE 30-bus system for simulation, and the data lacks universality. Therefore, after the experiment selection, we can go deeper and make multi-dimensional node selection, so as to consolidate the experimental research results, provide theoretical support for the future design of inertial control system of direct-drive permanent magnet wind turbines, and realize frequency optimization with minimum loss.