
Abstract
In this paper we have designed an interactive device of bionic flower based on linkage mechanism by studying the shape and structure of flowers. Firstly, in order to solve the problem of variable morphology of the bionic flower, we have built the internal skeletal structure of the bionic flower in accordance with the working principle of the hinge linkage mechanism; secondly, based on the internal skeletal structure, we have tested a variety of ductile materials, and identified the multifunctional paper material that can be shape-shifting and color-changing; thirdly, we have used the key technology of Arduino to build the intelligent sensors and hardware, and solved the opening and closing sequence and response range of multiplecluster interactive objects. This article research provides new ideas for the display of flower and plant science to the public from the perspective of bionics, and gives new application areas and cultural values to the interactive bionic design of plants and flowers.
Introduction
Since its birth, the research content of bionics has long gone beyond the definition of bionics given by the academic community at the time. Bionics combines the fields of science and technology such as engineering, and its application innovation mainly lies in improving production efficiency. Bionic Mole Forelimb Intelligent Row Cleaners [1] can solve the problem of unstable seeding depth to a certain extent; Li et al. [2] used the macroscopic and microscopic characteristics of bamboo to design machine tool columns, improving the mechanical properties of the material; Xi [3] applied bionic principles to design an “Ecological Window”, and provided new ideas for the architectural design. Zhang [4] studied and analyzed the factors affecting the development of enterprises from the perspective of bionics; Meng [5] applied bionic machines to the field of art and created the bionic art work “Bug of Light”. Bionics has been studied and developed in various fields to different degrees. With the increasing economic development, agricultural technology and agricultural machinery design have long been bionic, but the bionic and mechanical applications in this field are biased towards the field of agricultural technology, breeding and improvement of plant varieties and yield and quality. In view of the current trend of smart agriculture development and the consequent derivation of cultural activities and industries, Although we have digital plant virtual simulation technology to assist agricultural research [6], virtual plant modeling is difficult; visual presentation mostly requires a specific visualization platform to carry, and the content is mainly display-based, especially in the agricultural information dissemination and the flower and plant science to the public; the use of the technology is not mature enough. Therefore, in this paper, we will explore the bionic design based on mechanical technology, apply the principle of linkage mechanism to floral bionic design, make an artistic attempt to popularize the science of flowers and plants, conduct experiments and analysis, create floral bionic design works, and draw conclusions on the feasibility of applying the mechanical technology and floral bionic design to the science popularization.
Related research
Biomimetic design of flowers
Bionics is an interdisciplinary discipline developed by combining engineering technology and biological sciences. Its research scope is very broad and shows an increasing expansion. As bionics is evolving, bionics and design are interpenetrating and bionic design has emerged [7]. The dimensions of bionic design are diverse, such as morphological bionic design, color bionic design, material bionic design, and cultural bionic design. There are many varieties of flowers in the world, and there are different types of floral bionic design, different methods and different fields of application. Liu [8] conceived and designed an Experience Hall of Plant Science Popularization, and the main design method is based on the morphological bionics of flowers, and the theme is “Flower Story”. The shape and structure of real flowers are imitated, and the knowledge of flowers is integrated into the building structure of each science popularization space, so that the display of the science to the public is full of humanistic feelings. Cai [9] used laser scanning and 3D technology to reconstruct the virtual opening process of China roses and created the holographic works named “Shadow of Flowers”; Yang [10] drew inspiration from natural life and used peonies and chrysanthemums as bionic objects and combined them with ceramics to create the works named “Love of Flowers”; many classic styles and patterns have appeared in clothing design based on bionic floral elements, and the expression of flowers has become more abstract, for example, the fashion designer Christian Dior designed a dress with a tulip silhouette in 1953; Jin [11] relied on blue lilies for bionic design on women’s clothing and innovated the design of women’s sleeve types. The creativity of floral bionic design comes from the shape, color, function, texture and structure of flowers. By observing them in their naturally presented state, we extract all or some of their characteristics, apply the theoretical basis of bionics and professional achievements, combine new ideas, new methods and new ways to create new floral bionic designs [12].
Bionic application of linkage mechanism
The frame, the driving link and the follower are the three main parts that constitute the linkage mechanism. It is called a linkage mechanism because the motions of its driving links all need to pass through the intermediate member of the linkage in order to drive the follower, and the linkage is not directly connected to the frame, which is a common feature of the linkage mechanism [13]. The simplest form of the linkage mechanism consists of four rods, and each of its kinematic subparts is a rotating subpart, i.e., the four members are connected by a rotating hinge, so it is also called a hinge four-bar mechanism (Fig. 1), which is also referred to as a plane hinge four-bar mechanism and is also considered the basic form of a plane hinge four-bar mechanism [14]. The planar four-bar mechanism is often used as a basis for multi-bar mechanisms, while other four-bar mechanisms can be considered as its evolutionary forms. Typical evolved forms are represented by crank rocker mechanism, crank slider mechanism, guide rod mechanism and so on. Therefore, the linkage mechanism has various forms of classification, and has the flexibility to achieve a variety of motion requirements, and it is widely used.
Sketch of hinge four-bar mechanism.
In view of the advantages of flexible and diverse forms of the linkage mechanism, which can realize the change of transmission direction and increase the stroke, force and long-distance transmission, the linkage mechanism is very widely used in the practical application of unfolding structures [13]. For example, in the field of aerospace, we can find the unfolding mechanism of the solar panel of artificial satellites and the actuation in robots, manipulators and human joint prostheses; in production and daily life, we can find bullhead planer, folding umbrellas and so on; in agricultural activities we can find the mechanical design of fruit and vegetable picking equipment. Because of the flexibility and practicality of the linkage mechanism, it has a practical application value in the study of agricultural plant science popularization exhibition, and the exhibits combined with plants have a different interest from the virtual display, which is important to enhance the appeal of the public. Bionic design is applied to the design of agricultural machinery, starting from morphological bionic, structural bionic, functional bionic, and mechanical performance bionic, to improve the efficiency of machinery use while carrying out agricultural production in a “natural way” [15]. Hong [16] started from the aspect of science popularization and used the linkage mechanism to the mechanical exhibits in the science and technology museum, using the biological bird, horse, and lotus effect as living examples for illustration. Although both linkage machinery and bionic design are involved in the field of agricultural science, there is still large room for innovation. Given that the mechanical gripper’s claw-like opening and closing structure in this mechanical principle is very similar to the flower opening and closing dynamic state, it has a strong referential significance for floral bionic research.
The bionic flower design consists of three aspects: shape, color, and dynamic state. The bionic shape and color are based on visual perceptibility, while the bionic state is based on interactive perceptibility. Bionic flowers need to determine the internal interaction structure before shaping the external materials.
Interaction-oriented skeletal structure of bionic flowers
The construction of the internal skeletal structure determines the modeling fidelity and dynamic realistic visualization of the bionic flower. The construction of bionic flower skeleton structure has passed 3 tests and each experiment has been upgraded and reconstructed to different degrees.
The first experiment of building the internal structure was carried out using thin wooden sticks and gears. The thin wooden sticks were used for the construction of the environmental art model, which were polished with grooves, and the four sticks were crossed vertically with each other and glued on one side, and finally built into a small cube the gears were made of 5 spiral bevel gears, and the gears were placed through the wooden sticks in a cross shape with one side of the gears upward and small holes on each gear, into which the polished wooden sticks were inserted. As long as the power is provided to make the gears turn, four sticks in four directions can achieve a simple action of opening and closing. In this way, a gap is needed when the gears are turning, and it is unsuitable for combining with the external molding materials. The second attempt was made to simulate the opening and closing structure of flower using the basic form of a linkage mechanism. This structure allows the petals to maintain a certain movable range, and the distance of up and down movement of the push rod can control the magnitude of the flower opening and closing dynamics. The mechanical structure of the flower head as a whole is connected to the top of the hollow tube and fixed, and the top of the push rod is connected to a pentagonal closed ring. When the rod holder moves upward, it will push the rod and petal wire upward to achieve the effect of flower opening; on the contrary, when moving downward, the petal wire skeleton closes. Continuous reciprocating motion of pushing and pulling can simulate the effect of flower opening and closure. In the third experiment, considering that the internal structure requires a combination of several opening and closing structures, SolidWorks modeling and 3D printing molds were used in order to standardize the production, and the same approach was used for the fixed part of the actuator.
Construction design of interactive bionic flower skeleton
Construction design of interactive bionic flower skeleton

The exterior materials of bionic flowers are diversified and plentiful, and different materials present different visual effects, but the exterior materials of interaction-oriented bionic flower need to be considered for their flexibility, plasticity, coverability, sensing property and other factors. After several tests on different materials such as wool, fabric, wire, and paper (Table 2), it was found that paper material has the best bionic ductility.
Comparison of multiple materials experiment
Comparison of multiple materials experiment
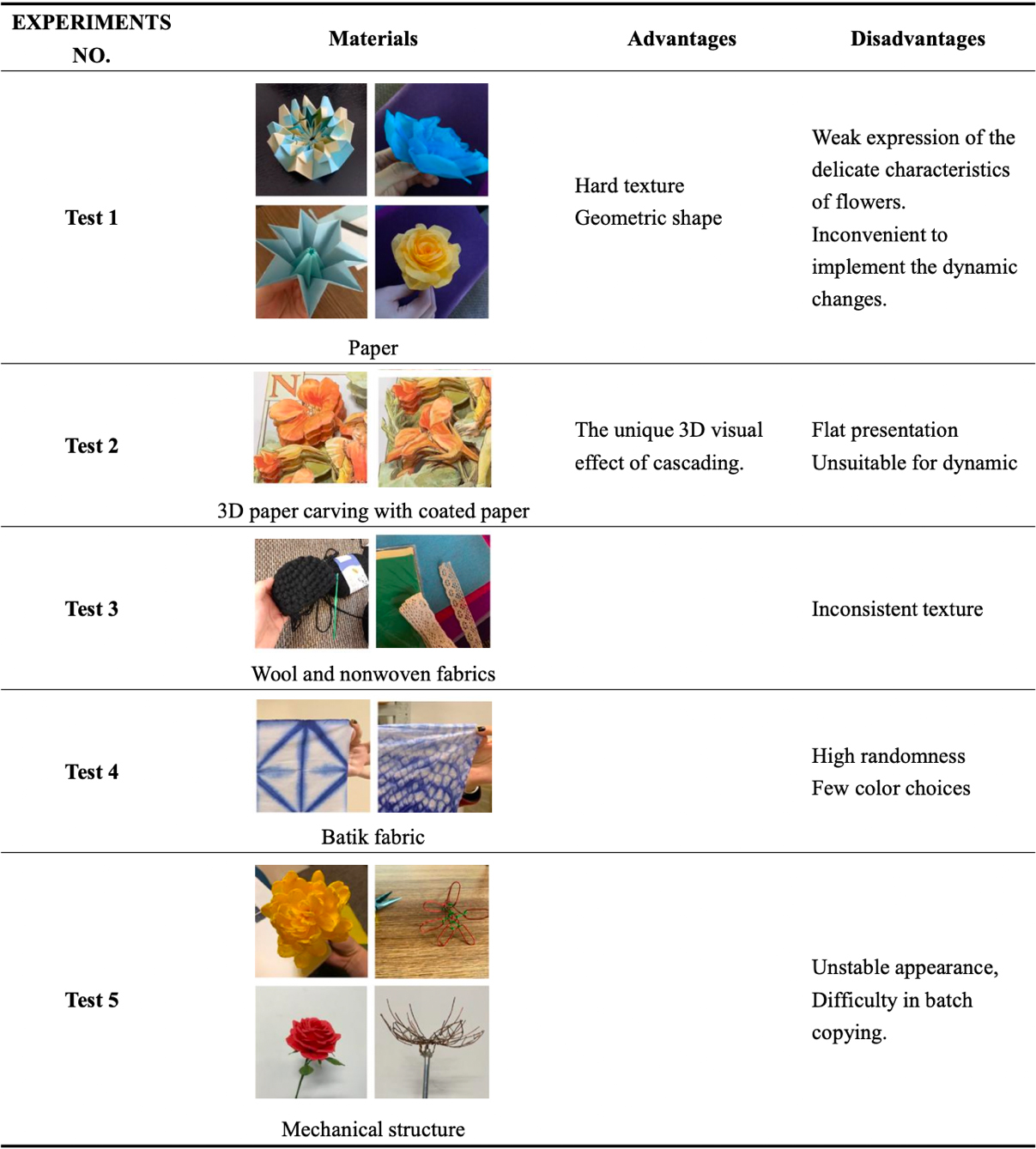
After testing and comparing various materials, crumpled paper is most suitable as the main exterior shaping material for bionic flowers. The paper texture and paper craft of crumpled paper are suitable for expressing the flower shape, and the plasticity of paper is also very suitable for hiding the mechanical structure. At the same time, due to the special processing technology, the surface of crumpled paper has a similar texture of plant; the color selection range of crumpled paper is large, which can adapt to the color changes of different flowers; it can also be combined with color powder for the use of dyeing techniques, and the color powder particles are attached to the unevenness of the paper surface, so that the color transition is even and natural, which can vividly express the bionic color of flowers. In addition, the stretchable tension of crumpled paper is large, so it can be more easily operated by cutting, pulling, stretching, rolling, and other paper crafts (Fig. 2).
Craft techniques of crumpled paper (from left to right): Cutting, stretching, rolling, dyeing and gluing.
After determining the internal skeleton structure and exterior materials of the bionic flowers, we chose a large-petaled Rosaceae (China rose) as the bionic object in this study. The China rose has long been called the “Queen of Flowers”. After thousands of years of social development, the China rose has become the embodiment of beauty, a symbol of love, and an ornament of good fortune, and it is not only loved by people from all over the world, but also taken as the “city flower” in many cities. The modern China rose has rich colors and beautiful shapes and it has small leaves and red petals, and its stem is always green and new. The flowers are mostly cup-shaped when in full bloom; their petal edges are curled and their colors include white, light pink, red, champagne, and pink; the flower is ranging from 13 to 20 cm in diameter, with 30 to 36 petals. The plant has long and upright branches with dark green leaves and delicate foliage. Through field investigation in Beijing Botanical Garden, Rose Museum, Flower Exhibition and other places (Fig. 3), it is found that compared with other flower types, roses are more abundant in shape, color, flowering time and culture, which is more suitable for the design of interactive devices with multi material integration. Therefore, this paper determines them as the research object.
Flowers research.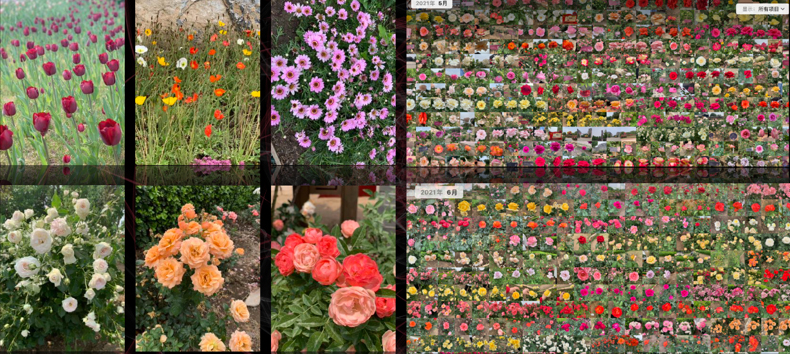
The production of bionic flower head.
The process of making the bionic China rose is roughly divided into four steps (Fig. 4) the bionic rose head with complete structure is formed through four steps of production (Fig. 5). When pasting and shaping, the type and number of pastes and the position of pasting will affect the presentation of the flower shape. A gap is also needed between the petals when pasting, and the opening and closing relationship is not affected. Other incidental flowers, branches and leaves are all made in a similar way.
The effect of bionic flower head.
Establishment of intelligent hardware
After the dynamic mechanical structure is built, the intelligent hardware set is further built to complete the interactive technology implementation. The smart hardware was tested and compared with different models and development environments (Table 3). The most commonly used development environments for STM32 microcontrollers are Keil, Arduino Nano and Arduino UNO development boards with their own development environment as Arduino IDE, all three are based on C language for programming, among which Arduino is more friendly and easier for novices who lack professional background. In the infrared sensor part, the infrared geminate transistors, U-Tron AM412 human infrared sensor and HC-SR501 human infrared sensor module were tested Its working principle is to detect the infrared radiation from the human body, and the specific temperature of the judgment of the identification of moving objects to sense. Among them, the infrared geminate transistors are divided into the transmitter and receiver, the effective distance of induction is within two meters, and it is smallsized, and more friendly for the works in the small space The other two hardware have different shapes and sizes; the U-Tron AM412 is designed for Arduino, and the Fresnel optical lens on the surface of HC-SR501 is larger; the farther the distance, the stronger the induction, the larger the angle; the two hardware have the higher sensitivity and reliability, which can be widely used in all kinds of automatic induction electrical devices. In the servo part, we tested ZX361S intelligent serial bus servo, P0037 servo, SG90 servo and MG90S servo in turn. The bus servo has a larger driving capacity and is slightly larger in size, and is commonly used in the robot’s robotic arm. The other servos have a rotation angle range of 0–180
Comparative analysis of intelligent hardware
Comparative analysis of intelligent hardware

Combining the construction of the skeleton structure and the shaping of the exterior structure in the early stage, we use infrared geminate transistors, Nano development board and SG90 servo to build Arduino to connect all modules of the intelligent hardware group to implement the technical feasibility of the single bionic flower interaction. The Arduino Nano board is controlled by the code program instruction of Arduino IDE, and we enable it to control the infrared sensor to make the feedback effect of flower opening and closing for different situations of external sensing. When the spectator crosses the IR geminate transistor monitoring range inside the leaf with their hands, the sensing is triggered and the flower head shows the action from opening to closing. Bionic Testing Technology Process of Single Flower Head (Fig. 6). The servo angle corresponding to the open and closed state is changed by modifying the variables servo_open and servo_close. In this test const unsigned char servo_open
Technical route of single bionic flower interaction.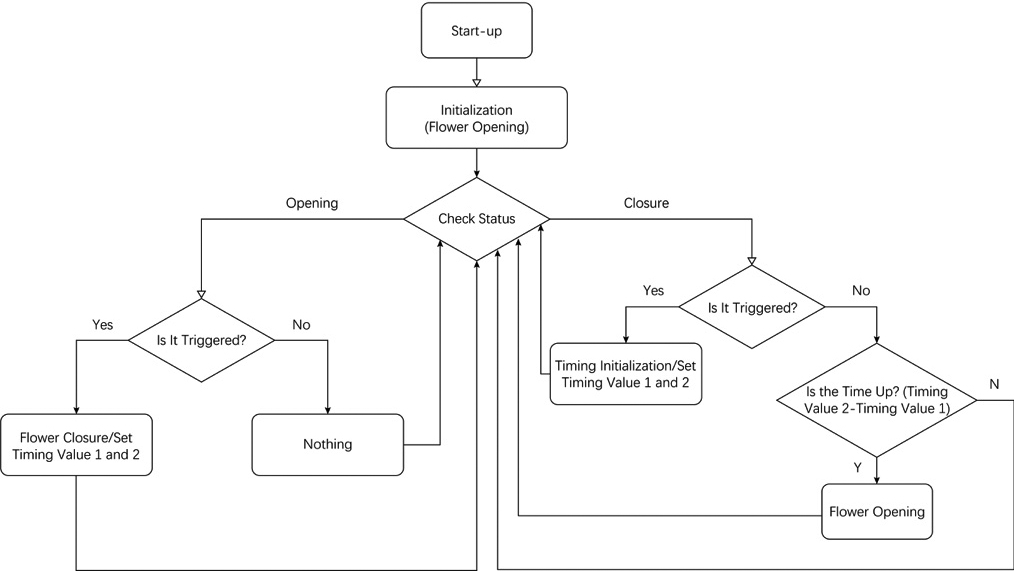
The interactive test results of the single bionic flower confirmed the feasibility of the established technical route. The bionic flower (China rose) in the test was initially open, and after the user interacted with the infrared sensor, the flower showed its closure, and the system set a 30-second waiting time for the flower to bloom again, thus sensing the cycle [17]. We used the Arduino smart hardware set, and finally realized the design of an interactive device for a single bionic flower (China rose) (Fig. 7).
Production process and test effect of single bionic flower interaction.
Hardware wiring diagram.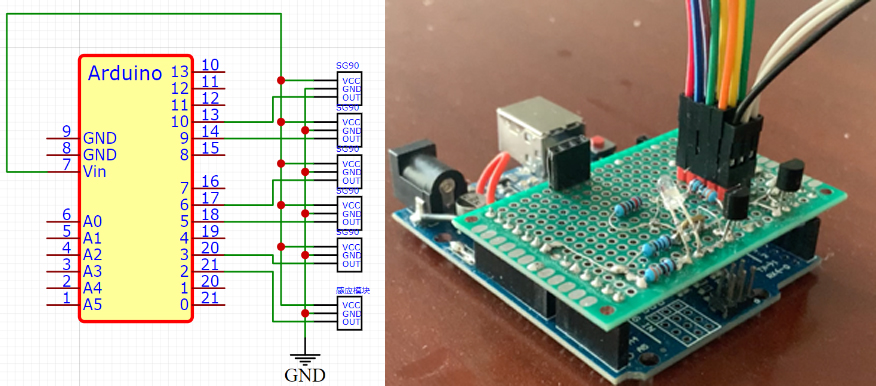
Schematic diagram of the interaction flow of the multi-cluster bionic flower.
Implementation of interactive technology
Regarding the multi-cluster bionic flower, we need to consider not only the opening and closing structure of each flower itself, but also the correlation between multiple flowers, i.e., the limitation of response range, the order of opening and closing time, the location of different opening and closing size and so on. The Arduino UNO development board has a fast and stable download speed and it can be powered by two ways: one is USB power supply and the other is by external 6–12 V DC power supply; We need to consider the length and safety of the display, the development board uses external power supply; at the same time, as Arduino controls multiple servos and causes the problem of insufficient pins, we need to separately weld the board for wiring (Fig. 8). The servo itself can be connected with external power, ground and signal lines. We can receive PWM signals to generate bias voltage in its internal circuit, which will trigger the generator movement and generate different rotation angles of the servo according to the code settings, thus realizing the interaction requirements.
The Diagram of the Interaction Flow of the Multi-cluster Bionic Flower is shown in Fig. 9. The Arduino program structure consists of two main parts, void setup () and void loop (). The former is used at the beginning of the program to declare the variables and pin names in the code, the five servo initialization variables, such as #define FLOWER_NUM 5 which defines the number of servos (meaning the number of flowers) to be 5, and the call to the Arduino servo library function Servo.h. The setup () function is executed only once throughout the initial setup. void loop () is used after the setup() function and is executed by the principal part of Arduino in a continuous loop.
Program implementation flowchart.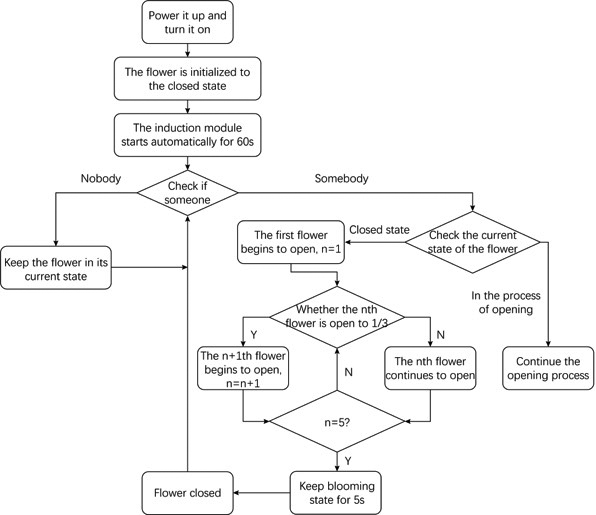
Finished product integration.
As Arduino controls multiple servos, using digital pins will lead to unstable operation and the pins must support PWM signals. Arduino pin 2 is connected to the infrared sensor and set to input mode INPUT. When the unmanned movement is detected within the detection range of the infrared sensor, the code is digitalWrite(LED_BUILTIN, LOW) that is, the infrared module keeps the output low level, the motor stops that the flower head keeps together; When someone appears within the detection range, the code is digitalWrite(LED_BUILTIN, HIGH) that the module will output a high level signal, the motor drives the potentiometer through the reduction gear to move, the servo rotation that the flower response open. Set the previous flower open 1/3, the next flower began to open, visually maintain the flower open sequentially coherent. Arduino pins 3, 5, 6, 9, 10 connected to five servos, and set it to output mode OUTPUT, set the time and angle of the servo rotation, control the speed and state of flower opening. The sensor signal is read and judged by the presence or absence of the audience to control the rotation trigger and the end of rotation of the servo. The initialization of the overall program module serial port framework is shown in Fig. 10. After several experiments, the best infrared sensing distance of about 1.5 meters was explored.
After each component was made, all elements were further integrated. Considering the external factors such as load-bearing, supporting and covering, all the components were fixed on the metal grid frame, including the interactive main flower, static incidental flowers, green leaves and stems as well as intelligent hardware set. The interactive main flower is fixed first, and then the static incidental flowers and stems are combined. The interactive main flower is fixed directly on the supporting mechanical structure, and the gap between the petals is reserved for opening and closing to ensure that there is surplus space for opening and closing. The static flowers, stems and leaves, and dynamic flower skeleton were fixed on the metal grid frame by using glue gun and wire winding (Fig. 11). Finally, the metal grid frame was fixed with the outer frame to further decorate and beautify the overall visual effect.
As for the visual design of the interactive finished product, the composition form of repeated arrangement of single element of flower head was adopted, and the color difference was utilized to arrange five interactive bionic China rose separately as gathering points in an overall “S” shape, with the bionic flowers opening in sequence to form an invisible dynamic line, and other static incidental flowers gathered into a surface to form a colorful sense of flat composition.
Conclusion
This study is an active attempt to cross-fertilize mechanical structure, interactive technology and paper art technology, and it is also a research attempt to integrate multiple interdisciplinary disciplines of computer science, mechanics, floristry and design. We not only studied how to weld mechanical structures to achieve dynamic appeals, discussed the technical methods of physical properties, intelligent hardware and programmable materials, and realized the interactive application of the combination of linkage mechanism and intelligent sensors, but also studied how to use two-dimensional flat paper materials to interpret three-dimensional paper art expressions. Through the deep integration of paper art expression and interactive means, we have injected the static paper art with the imprint of digital era and broadened the morphological development and humanistic connotation of paper art.
This study takes flowering plants as the bionic research object, not only is the research and development of color texture wiping and dyeing methods close to bionic flower texture, but also a series of skills and processes are used to shape bionic flowers. The movable structure is also developed to bionic the dynamic presentation of flower ecology, which greatly expands the space-time dimension of flower plants in terms of implementation materials, interaction methods, popular science applications, etc. Based on the practical characteristics of low production cost, long application time and rich artistic expression, this study can be further used to explore the restoration and display of valuable flowers, rare species and more-difficult-to-cultivate plants, innovate the expression form and material of traditional science popularization, and develop new ideas of science popularization in the form of interactive art, and to provide new ways for plant conservation and development, science display and dissemination. It is also an active attempt to the ecological construction concept of green design.
In general, this study extends the virtual experience path of the visitors with the correlation of mechanical structure and intelligent hardware; we have created a new way of displaying flowers and plants by relying on the temporality of flower ecology and time-lapse bionomics; we extend the interactive context and cultural significance of paper art by virtue of the texture characteristics and craft techniques of paper materials.
Footnotes
Acknowledgments
The authors would like to thank the research team for their great cooperation, and are also very grateful for the funding and support from the Beijing Social Science Foundation Project (19YTB021), and sincerely thank the reviewers and the editor-in-chief.