
Abstract
The development of science and technology requires UAV to improve the accuracy of path planning to better apply in the military field and serve the people. The research proposes to use the social spider algorithm to optimize the ant colony algorithm, and jointly build an IACA to deal with the optimal selection problem of UAV path planning. Firstly, the swarm spider algorithm is used to make a reasonable division and planning of the UAV’s flight field. Secondly, the AC is used to adjust and control the UAV’s state and path. Then, the IACA is formed to carry out performance simulation and comparison experiments on the optimal path planning of the UAV to verify the superiority of the research algorithm. The results show that the maximum number of iterations of the original AC and the IACA is 100, but the IACA under the route planning optimization reaches the convergence state in 32 generations; Moreover, when the number of iterations is about 20 generations, there will be a stable fitness value, which saves time for the experiment to find the optimal path. In the simulation experiment, it is assumed that three UAVs will form a formation to conduct the experiment, and the multiple UAVs will be subject to global track planning and repeated rolling time domain track planning. The autonomous operation time of multiple UAVs through the assembly point is (5.30 s, 5.79 s, 9.29 s). The distance between UAVs during flight is predicted. It is found that the nearest distance is 2.3309 m near
Keywords
Introduction
With the continuous reform and development of aviation technology, more and more UAVs are used in high-risk, high-intensity search and rescue missions or patrol tasks. Therefore, UAV is gradually becoming an important pillar in China’s aviation field [1]. In fact, the path planning of UAV is to plan the best path with the help of its own system and external conditions under the premise of comprehensive consideration of UAV’s flight time, fuel consumption and threats, so as to better complete the task. However, at present, the search and inspection of airspace requires that UAVs can complete tasks efficiently and quickly in a short time, which undoubtedly increases the difficulty in the forward development of aviation technology [2]. How to innovate on the existing aviation path planning technology and expand the application field at the same time, so as to realize the autonomous flight of multiple UAVs in a small area is still the focus of researchers and scholars [3]. In order to solve this kind of problem, the research proposes to integrate the swarm spider optimization algorithm and the ACO to build an improved algorithm, which can be applied to the track and path optimization problem to improve the search ability and task completion efficiency of multiple UAVs. The two algorithms integrate with each other and introduce guidance factors, which can speed up the search to a certain extent and has high feasibility [4, 5].
Related works
The prosperity of a country is inseparable from the aviation technology of each country. Lin et al. [6] proposed an error resistant track association algorithm based on distance hierarchical clustering for the problem of track association of aircraft platforms under complex conditions of different targets. Monte Carlo simulation shows that, compared with the classical algorithm based on reference topology feature (RET), this algorithm has significantly improved the correlation accuracy and adaptability to complex conditions. Zhou et al. [7] proposed the VIKOR method based on flight parameters to evaluate the landing quality of UAVs. During the experiment, several flight parameters were used to evaluate the landing quality, and the absolute standard was determined using the ranking obtained. The comparison results show that there is a high similarity between the two, with a correlation coefficient as high as 0.917, which is better in quality assessment. In order to improve the aerial spraying efficiency of helicopters, Liu et al. [8] proposed the optimal full coverage path planning method and developed the corresponding device. The longer the spraying path is, the larger the spraying area is, and the greater the pesticide consumption is. Under the premise of full coverage, the shortest spraying route distance can ensure the most accurate coverage. Xia et al. [9] proposed a global path planning algorithm based on improved quantum ant colony algorithm to improve the ability of Unmanned Surface Vehicles (USVs) to carry out underwater tasks. The simulation results show that the algorithm requires the lowest number of iterations to converge to the minimum value, and can effectively obtain the optimal path of USV. Nguyen et al. [10] proposed an online path planning algorithm for joint detection and tracking, which also uses null probability constraints to maintain a safe distance between UAVs and interested targets. It has been proved through practice that the algorithm is capable of being subjected to multiple unmanned electrically labeled objects.
Wang and Liu [11] established a multi-target detection method based on virtual reality technology by comparing the advantages and disadvantages of multi-target tracking algorithm, ant colony algorithm and hybrid particle swarm optimization algorithm. The results show that compared with previous models, the overall optimization efficiency of UAV route is improved by 15%, which is more practical. Warner and Rogers [12] proposed an algorithm to determine flight performance by estimating aircraft attachment position and payload weight. Simulation results illustrate the performance of the algorithm for various modular aircraft configurations. Zhao et al. [13] proposed a model called YOLO Expressway, which uses an improved YOLO model to enhance the real-time detection of expressway marking problems. The experimental results show that the proposed YOLO road model can accurately detect the road centerline in real time, and has high robustness to changes in different environmental conditions. Miao et al. [14] proposed a new position based lightweight beamforming technology. During the experiment, in order to overcome the inherent position error, a new position correction method was designed, which combined the position information of 5G system. The simulation results show that the algorithm proposed in the study has higher advantages. Wang et al. [15] proposed a Gaussian process unscented Kalman filter (GP-UKF) hybrid method based on UAV flight pattern recognition (FMR) to deal with UAV flight data estimation and prediction. The model has good effectiveness and practical application potential.
It can be seen from the research on the free planning algorithm of UAV and track by domestic and foreign scholars that there are many researches applied to UAV path planning and UAV driving control. There are fewer trajectory planning algorithms for autonomous flight. For this reason, the research mainly discusses the trajectory planning algorithm applied in the field of multi-UAV flight.
IACA for optimal track planning and construction of multi-UAV autonomous flight model
Experimental design of social spider algorithm in the field of multi UAV flight
The gregarious spider optimization algorithm is a heuristic algorithm, the specific idea is to imitate the behavior of gregarious spiders, such as predation, web weaving and reproduction. The SSO algorithm regards the spider as a search space, and the position of the spider in the space is a solution to the problem. And in the SSO algorithm, the spider is assigned a weight value by calculation, and this value represents the size or quality of the spider [16, 17]. The determination of the population size and the proportion of male and female spider population in the optimization algorithm of social spiders is shown in Eq. (1).
In Eq. (1), it
In Eq. (2), it
In Eq. (3),
In Eq. (4), it
In Eq. (5), it
In Eq. (6),
In Eq. (7), it
Schematic diagram of UAV threatened by a single missile position.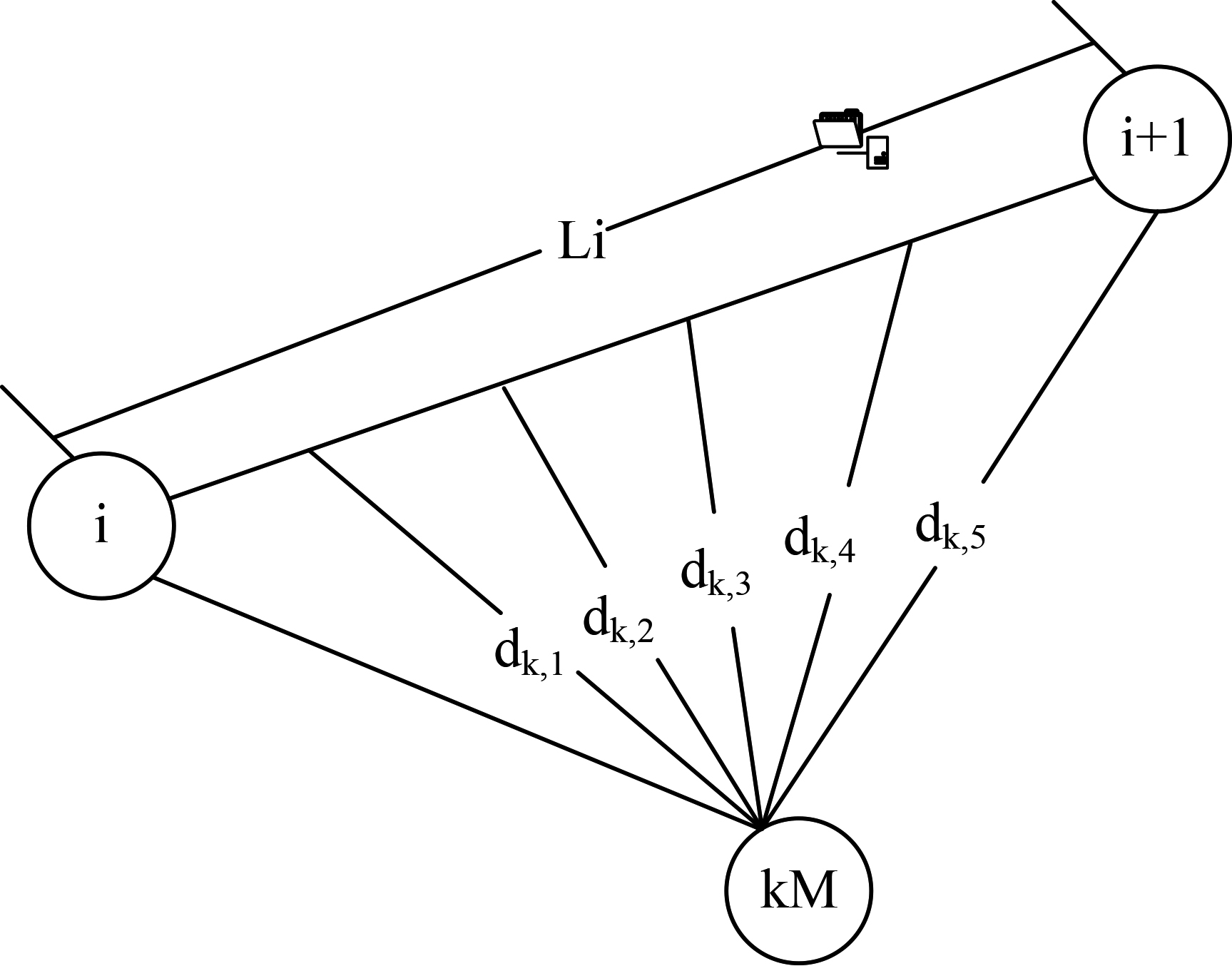
It can be found from Fig. 1 that the threats received by the UAV come from all directions during the mission. Therefore, in order to minimize the threat cost, each factor needs to be solved, as shown in Eq. (8).
In Eq. (8), the number of nodes in the UAV path is assumed to be
The smaller the weight of the corresponding spider in Eq. (9), the least threat to the UAV path, which is the optimal solution.
During the autonomous flight of UAVs, the connections between UAVs are connected through communication topology, and the process is also limited by the random occurrence of various tasks and the distance between UAVs. For the performance of the conflict suffered by the UAV, see Fig. 2 for details.
Schematic diagram of UAV collision detection.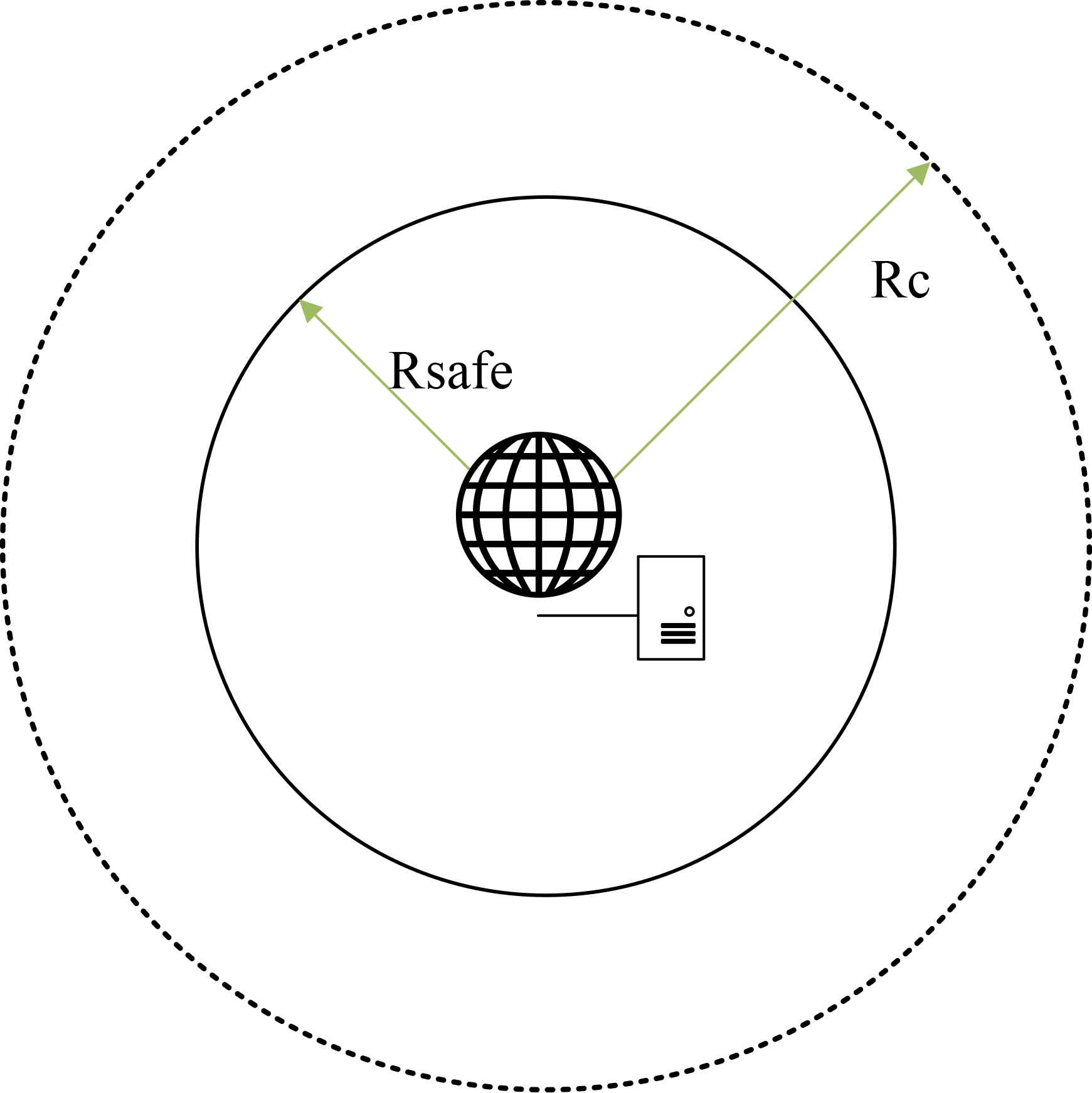
In Fig. 2, the multi-UAV often needs to maintain the flight distance during the flight and ensure that it is greater than the safe distance
In Eq. (10),
In Eq. (11), it
Equations (12) and (14) represent the ant circle model and the ant dense model respectively, which are the reciprocal of the UAV total track path length; Eq. (13) represents the ant volume model, which uses the reciprocal of the local track path length.
Equation (15) represents
Flow chart of IACA.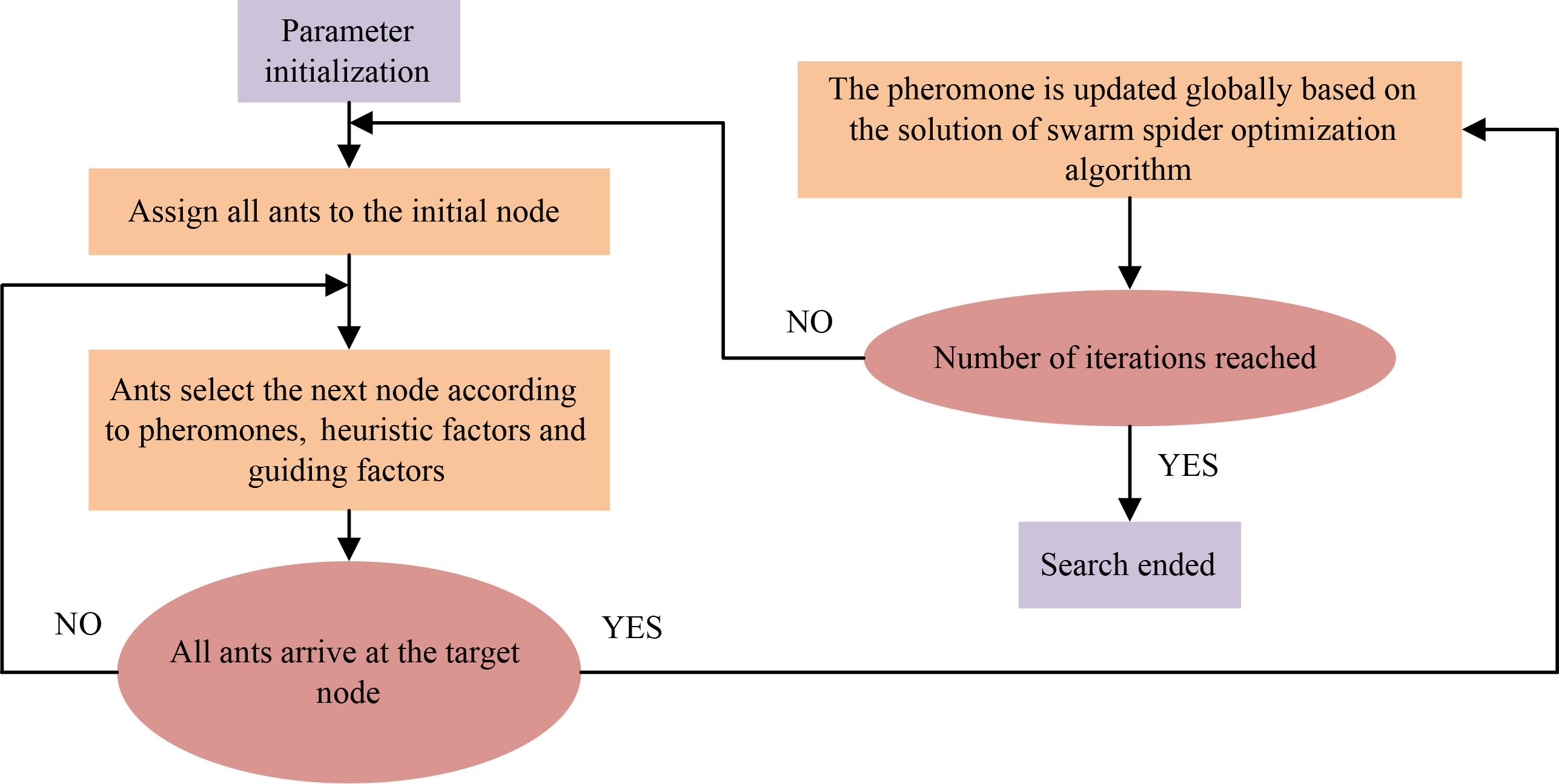
It can be found in Fig. 3 that after the parameters are initialized, the number of iterations is set to 0, that is
In order to prove that the proposed algorithm can have the best planning effect for multi-UAV track paths. The experiment was set up in the following environment: the memory was 8 GB, the hard disk was 500 GB, the processor CPU was Intel (R) Core (TM) i5-8300 H, and the process software was MATLABR2018b. Assuming that the experimental flight area is within 20 km*20 km, the comprehensive cost function of the threat to the UAV is set to be 0.3, 0.2, 0.3, and 0.2
Effect Comparison of weighted path length between the improved algorithm and the original algorithm.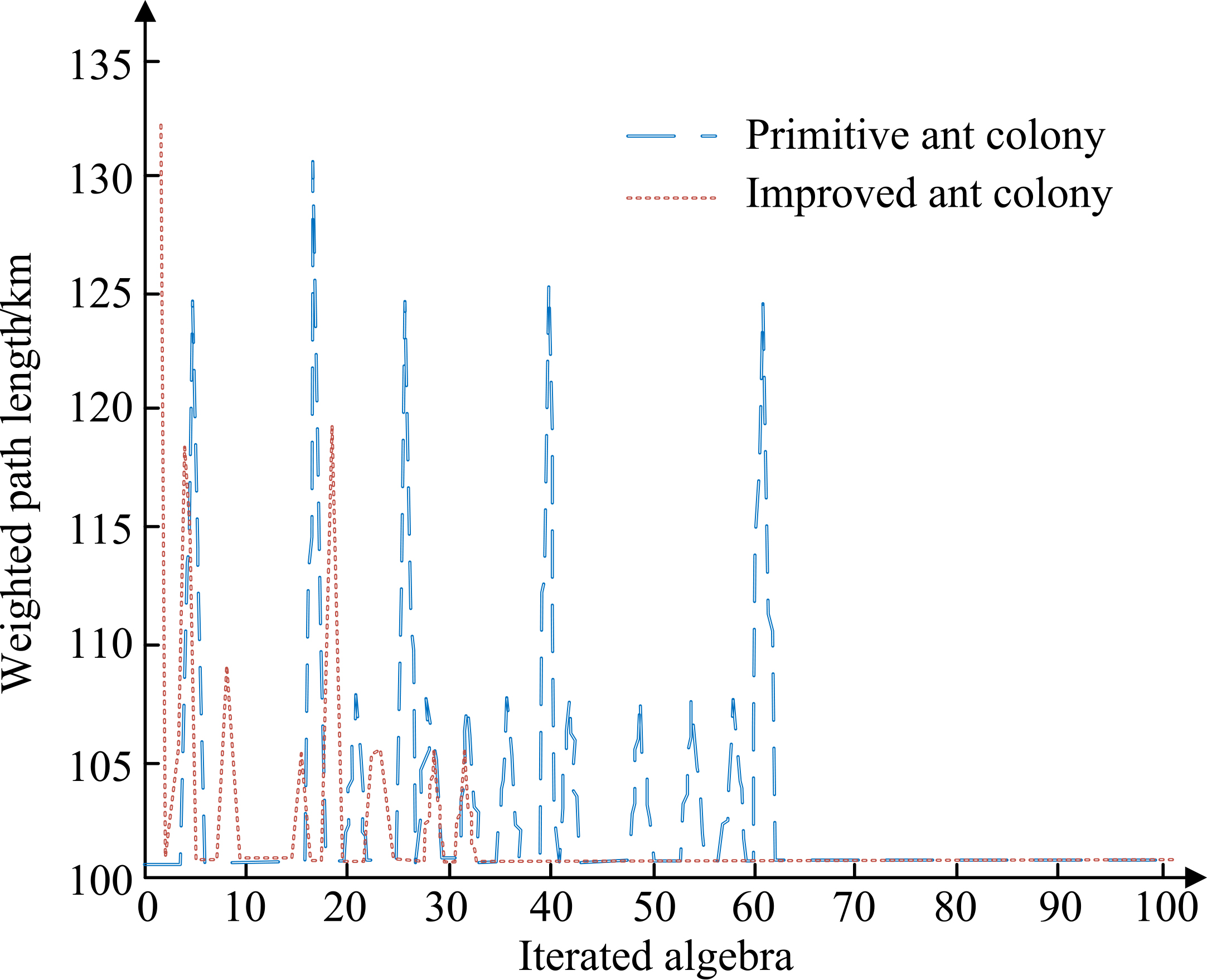
In Fig. 4, it can be found that the maximum number of iterations of the original ant colony algorithm is 100 generations, and it starts to converge at about 62 generations; while under the IACA, although the maximum number of iterations is also 100 generations, it starts at about 32 generations. convergence. Based on the above results, the optimal planning ant colony algorithm for the track path proposed by the research has high convergence, that is to say, the algorithm has high computational efficiency in the optimization process of the UAV track path planning, and has a high computational efficiency for the data. The set is highly inclusive and has high universality. The performance of the original ant colony algorithm and the IACA with the introduction of the guiding factor and the colony spider algorithm are compared, as shown in Fig. 5.
Effect Comparison of fitness value between the improved algorithm and the original algorithm.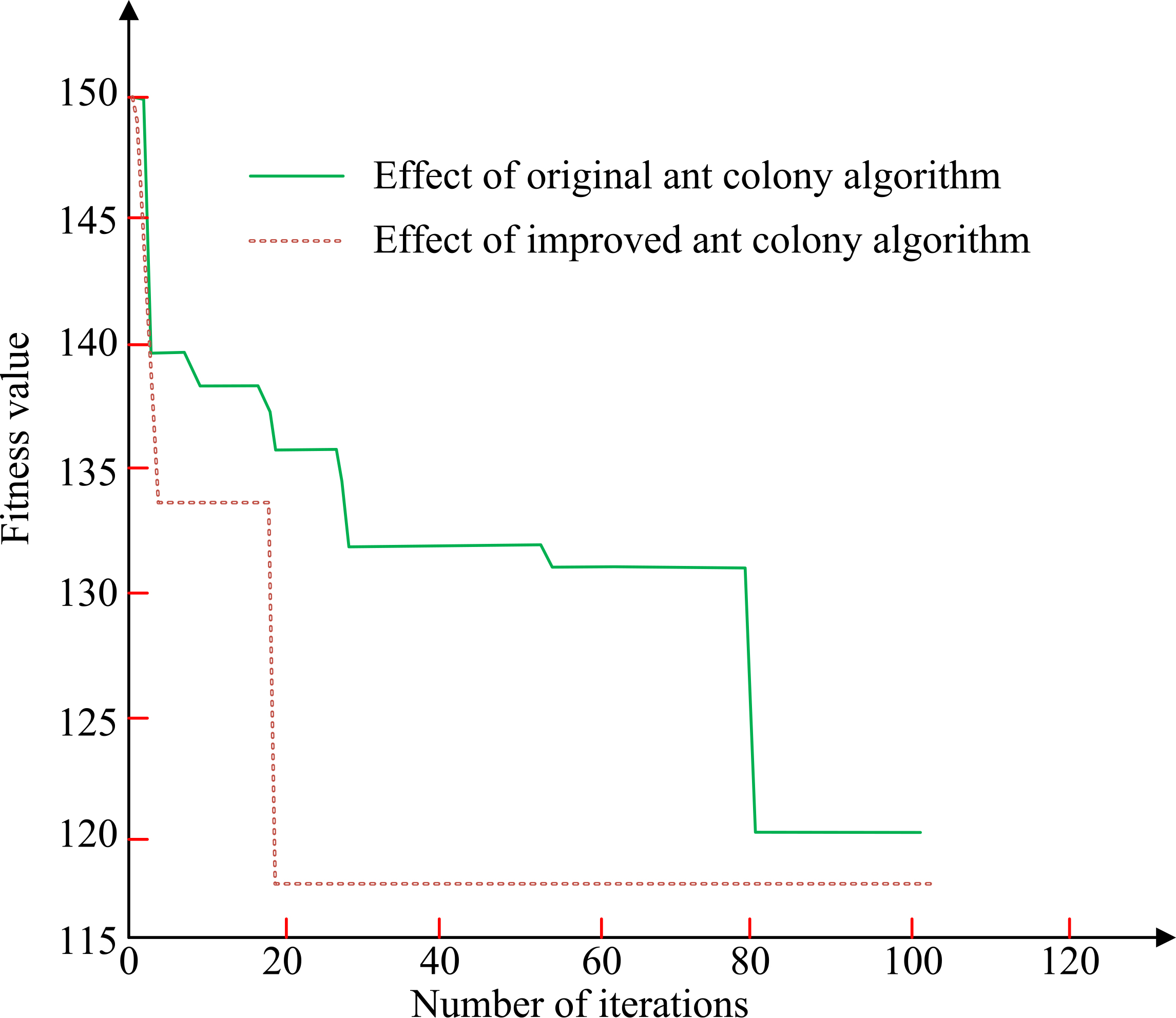
In Fig. 5, it can be found that the fitness value of the original ant colony algorithm is also changing rapidly in the process of gradually increasing the number of iterations. Before about 30 generations, the fitness value changes greatly, but after 80 generations, the fitness value is stable. at 120. This is because the original ant colony algorithm does not plan the UAV’s trajectory comprehensively, and the search time is too long. The IACA can effectively reduce the sensitivity of the initial state during the experiment, and the fitness value can be stabilized at 118 when the number of iterations is about 20 generations, which effectively saves time for the ants to find the optimal path. This also shows that adding a guiding factor and using the colony spider algorithm to optimize the information update pheromone can make the ant colony algorithm converge faster, shorten the search time, and speed up the algorithm process. Then the simulation experiment is carried out on the planning of the UAV track path under the research algorithm. In the process, the fitness value of the UAV is first converged in the process of assembling, and the fitness value required for the experiment is determined, as shown in Fig. 6.
Objective function convergence curve of UAV assembly section.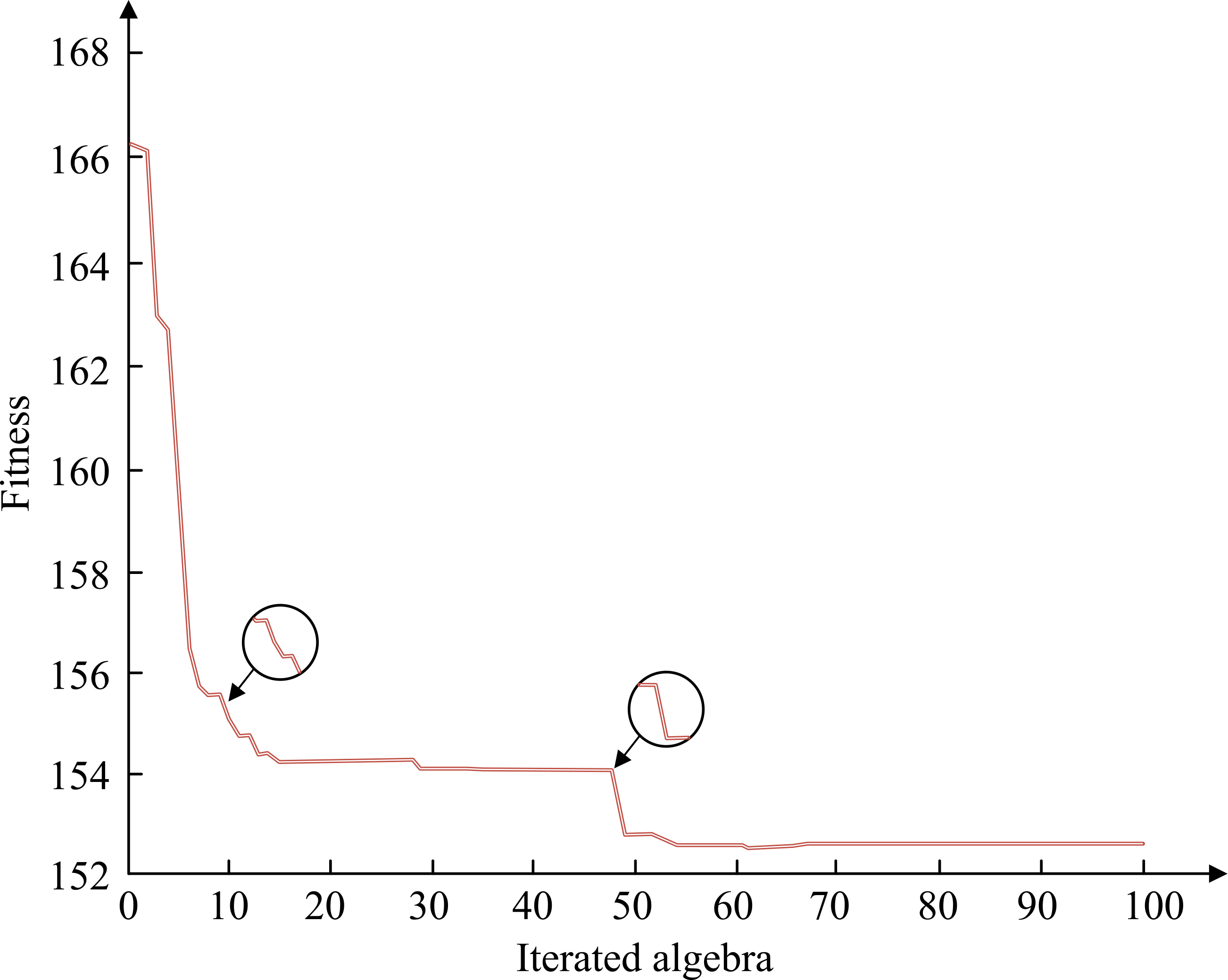
In Fig. 6, it can be found that when the number of iterations of the objective function in the UAV assembly stage reaches 10, the fitness value reaches 154; then continue to operate, when the number of iterations reaches about 50, the fitness value reaches 153. At this time, the convergence speed of the multi-UAV during the flight is the best, and the search ability is the best, and it is used in the subsequent experiments. The trajectory planning routes of multiple UAVs are different in different situations, as shown in Fig. 7.
Track planning route of multiple UAVs under different conditions.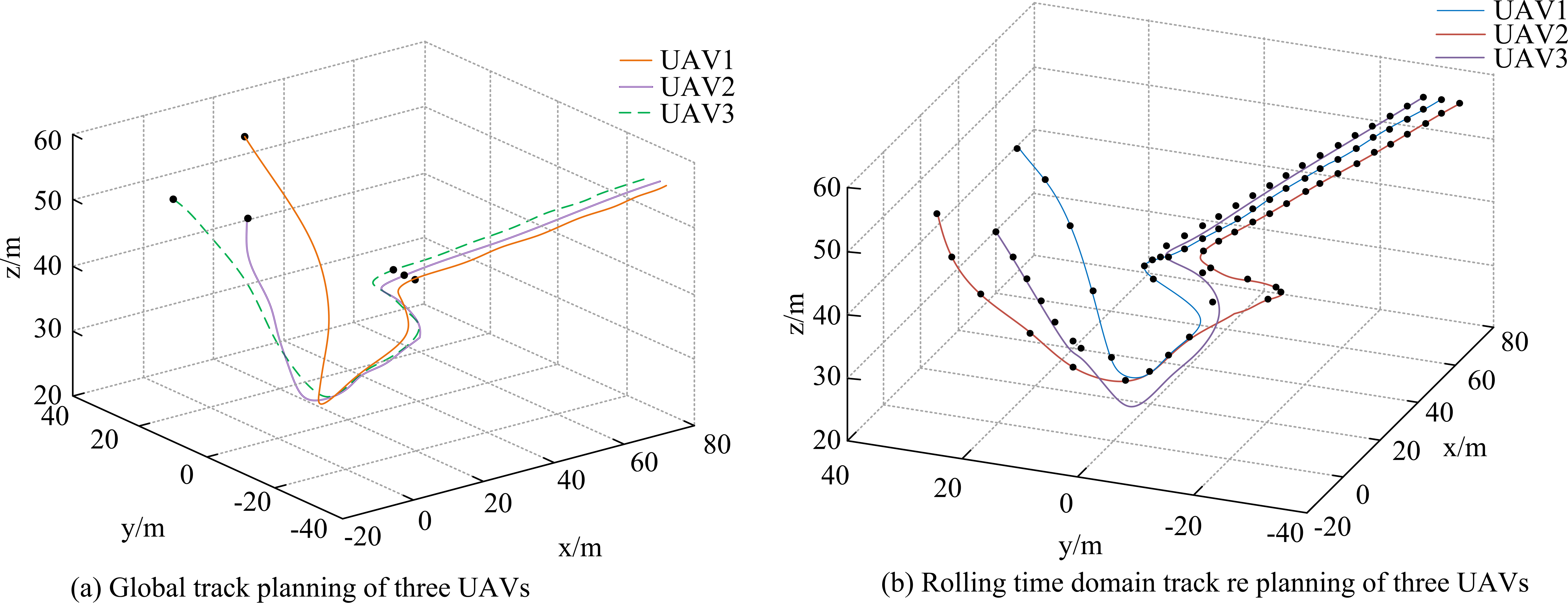
In Fig. 7, (a) is the track path of the three UAVs in the global planning, and (b) is the track re-planning of the three UAVs in the rolling time domain. In Figure (a), it can be found that the trajectory obtained in the global planning will conflict with the UAV near the rendezvous. This is because the communication topology and the state of the UAV when passing through the rendezvous point are not considered during the experiment. situation that arises. Therefore, the operation of Figure (b) is added for optimization. In (b), the flight missions are classified into two parts: formation assembly and formation composition. All pass through the rendezvous point at the desired speed. During the mission, the optimized autonomous running times of multiple UAVs passing through the rendezvous point are (5.30 s, 5.79 s, 9.29 s) respectively. This means that the UAV can adjust the remaining tasks within the experimental time, and reach their respective positions according to the total expected time and preparation speed, and achieve the same frequency resonance of speed, time and position. The main coordinated flight tasks for trajectory planning are shown in Table 1.
Display of main flight tasks of track planning
Distance between multiple UAVs in track reprogramming.
Velocity performance diagram of UAV in all directions in track planning.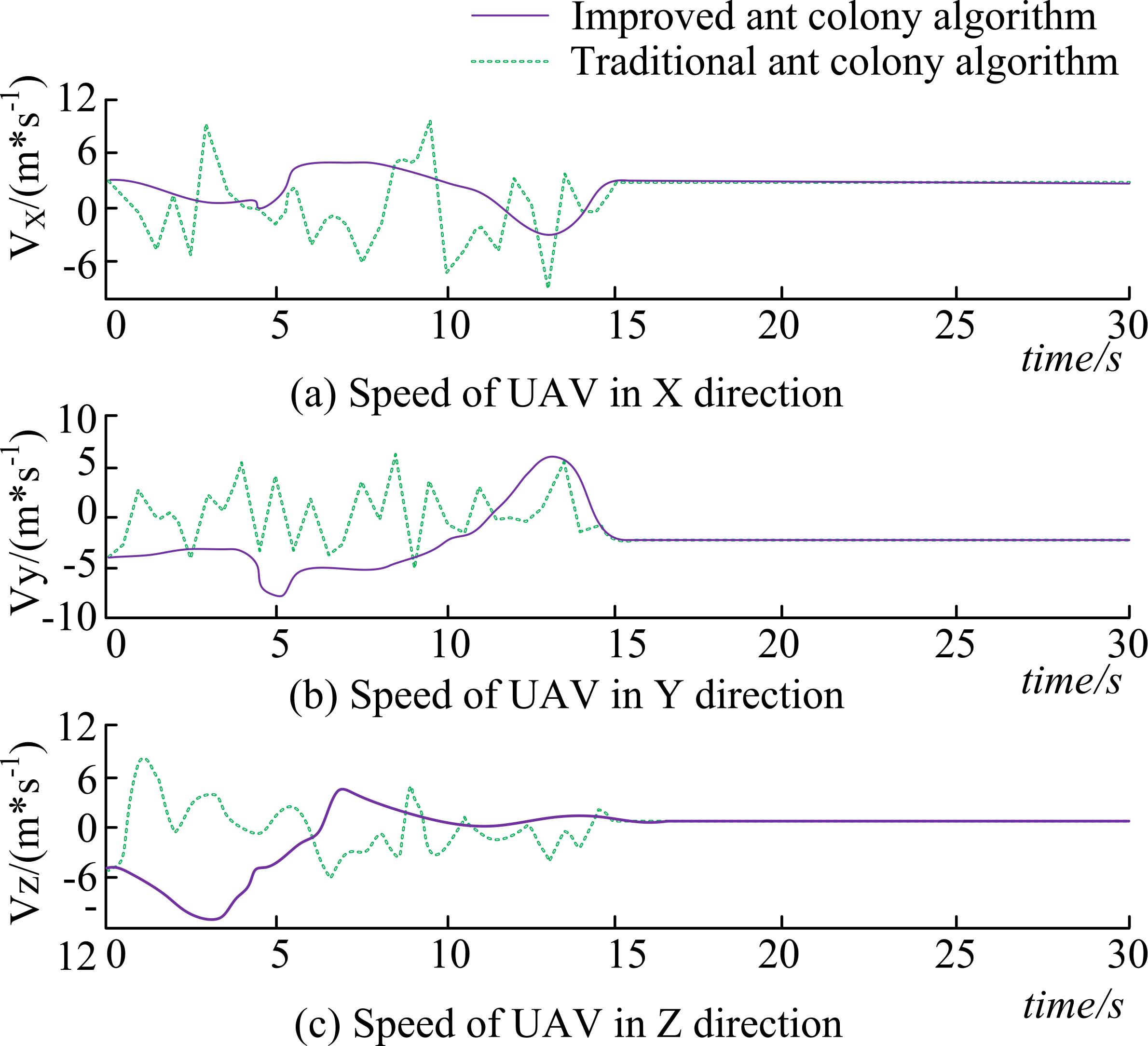
In Table 1, it can be clearly found that during the flight of the multi-UAV, the task events can be completed according to the experimental time regulations. And continue to fly after forming a team to perform tasks. Since UAVs are easily affected by the surrounding environment during flight, especially the conflicts between their flying fixed wings, it is necessary to consider the dynamic conflicts between UAVs, so it is necessary to consider the dynamic conflicts between UAVs in the trajectory planning. The distance is reasonably preset, and the specific effect is shown in Fig. 8.
As shown in Fig. 8, the minimum value of the distance between the drones is around
Figure 9 shows the speed of UAV No. 1 in all directions in the track planning. It can be seen that under different calculation methods, the speed of the UAV’s track planning in the three directions of X, Y, and Z is the trend of flight time. A steady state is reached in about 15 s. However, before 15 s, it can be seen in Figure (a) that the flight speed intervals of the UAV in the X, Y, and Z directions of the original algorithm are [
The increasing progress of aviation has brought great attention to UAVs in both military and civilian fields. However, the current UAV trajectory planning technology still has many problems such as blind path selection and slow calculation speed. In view of this, the research proposes to apply the ant colony algorithm based on the swarm spider optimization algorithm to the trajectory planning. The optimality of the algorithm is proved by the comparison of algorithm performance and simulation experiments. In the process, the guidance factor is set, and the colony spider algorithm is integrated into the ant colony algorithm. The research results show that the maximum number of iterations of the original ant colony algorithm and the IACA are both 100, but the former begins to converge in the 62nd generation; It can effectively improve the convergence speed of the algorithm and enhance the inclusiveness of the data set; the fitness value of the IACA stabilizes at 118 when the number of iterations reaches about 20 generations, which can effectively reduce the sensitive problem of the initial state in the process. The simulation results show that the autonomous running time of the UAV through the rendezvous point in the trajectory planning of the UAV under the IACA is (5.30 s, 5.79 s, 9.29 s), and the minimum distance between multiple UAVs is at
Footnotes
Funding
The research is supported by: Hunan Natural Science Foundation Project, Development of multi-rotor uav platform based on CORS system (2019JJ70029).