
Abstract
The exploration of stochastic partial differential equations in noisy perturbations of dynamical systems remains a major challenge at this stage. The study analyzes the effective dynamical system combining degenerate additive noise-driven stochastic partial differential equations, firstly in the first class of stochastic partial differential equations, the terms in the non-nuclear space formed by nonlinear interactions are overcome by effectively replacing the elements in the non-nuclear space through the ItÔ formulation, and thus the final effective dynamical system is obtained. The effective dynamical system is then obtained in the second type of stochastic partial differential equation using the O-U process similar to the terms in the non-nuclear space. At noise disturbance amplitudes of 5%, 10%, 15% and 20% AC voltage maxima in that order, the effective dynamical systems for the first type of stochastic partial differential equation and the second type of stochastic partial differential equation are more stable compared to the other types of partial differential equation dynamical systems, with the maximum range of error rate improvement for the sampling points 0–239 voltage rms and voltage initial phase value being 3.62% and 26.85% and 2.13% and 19.86% for sampling points 240–360, respectively. The effective dynamic system and stochastic partial differential equation obtained by the research have very high approximation effect, and can be applied to mechanical devices such as thermal power machines.
Keywords
Introduction
As an extremely important mathematical model, stochastic differential equations have made outstanding achievements in control science, economics, environmental science, information science, physical chemistry and other fields. The change process of things in nature can be divided into random process and deterministic process. The deterministic process means that the change process of things is consistent with the change law, while the stochastic process means that there is no definite mathematical expression to describe the change process. At present, the research on numerical analysis of stochastic partial differential equations mainly includes the introduction of commutative operators, higher-order convergence schemes, stochastic implicit equations, product noise, additional noise terms, etc. As the main evolution process of stochastic partial differential equations, the effective dynamic system has not only important practical value, but also important theoretical significance [1, 2]. The size of the singular perturbation parameter and the singular perturbation term generated by the linear operator term will directly affect the effective dynamic system of the partial differential equation, which will lead to different approximation forms of the effective dynamic system, and also lead to different approximation forms and convergence rates of the effective dynamic system [3, 4]. More and more mathematical scholars have also gradually begun to pay attention to the analysis of the effect of the multiplicative noise close to the bifurcation of the stochastic partial differential equation on the amplitude equation. Stochastic differential equation can more objectively reflect the changing law and state of things after introducing the influence of delay on the system and noise environment. Different noise intensity has an important influence on the effective approximate behavior of the system. If the time scale is of the same order as the square of the noise intensity, the degenerated additive noise will be transmitted to the core model through nonlinear interaction, and the core equation will get more terms containing noise. Based on the above analysis, the research analyzes the noise driving signal of the dynamic system with stochastic partial differential equations, aiming to provide new research ideas for the theoretical research of the dynamic system. The main contributions of the research are as follows. The first is to construct an effective dynamic system of two kinds of stochastic partial differential equations driven by degenerate additive noise, namely, stochastic partial differential equations with singular perturbation in noise terms and stochastic partial differential equations with singular perturbation in linear operator terms. The second is to verify and analyze the signal power system driven by noise to verify its practical value in practical engineering.
Review of the literature
Han and Kim [5] analyzed the fully discrete finite element method for a class of semilinear stochastic partial differential equations with multiplicative noise, discretized the nonlinear drift term by finite element interpolation technique, established the stability estimate of the high-order moment of H1 semi-norm of numerical solution, and proved the strong convergence of the fully discrete finite element method. The proposed fully discrete finite element method is convergent under strong norm and has a convergence rate close to optimal. The numerical experiment results verify the effectiveness of the theoretical results and numerical methods. Han and Kim [5] solved the internal high-order regularity and boundary behavior through the nonlinear stochastic partial differential equation driven by spatiotemporal white noise. The research results provide a new idea for the subsequent solution of nonlinear stochastic partial differential equations. Ahmad et al. [6] designed a wealth personal mortgage pool with a dynamic structure model. First, they modeled the default and advance loan process of the, and then obtained a differential stochastic partial differential equation by using the limit when the pool size tends to infinity, which confirmed the uniqueness and existence of the equation, and was convenient to analyze the support of mortgage loans to securities credit risk in different market environments. Sylla [7] analyzed the approximate controllability of a new class of multivalued fractional impulsive stochastic partial integro-differential equations with infinite delay in Hilbert space. Assuming that the related linear systems are approximately controllable, the possibility of mild solutions for the control system under mixed Lipschitz and Carathéodory conditions was confirmed by the fixed point theorem of multivalued mappings, fractional powers of closed operators, analytic
Tang et al. [9] focused on the solution of forward and reverse mean field stochastic partial differential equations and the optimal control problem of the corresponding mean field stochastic partial differential equations, proved the continuous dependence theorem of forward and backward mean field stochastic partial differential equations, proved the existence and uniqueness of the solution, and established the necessary and sufficient optimality conditions for the control problem. Hu et al. [10] have proposed a new dual motor multi-mode powertrain for pure electric vehicles. The coordinated control of clutch and motor can include four driving modes, which are respectively suitable for different driving conditions and can meet the requirements of longer mileage and higher vehicle efficiency. Compared with the single motor powertrain, the multi-mode powertrain proposed by the research has higher energy utilization. Aiming at the new perceptual auditory stimulation caused by the integration of powertrain and motor in hybrid electric vehicles, scholars such as Mosquera-Sanchez et al. [11] proposed a framework to solve the multi-objective sound quality balance of hybrid electric system noise. Compared with the classic active sound control scheme, the proposed technology has an optimization stage, which can help vibration experts and noise experts achieve the amplitude balance of tones, so as to meet the audience’s auditory expectations. Zine et al. [12] analyzed the parameter optimization scheme of introducing sensorless algorithm into the high-frequency signal of permanent magnet synchronous motor in electric vehicle, so as to minimize the torque fluctuation of additional stress on the motor shaft and eliminate the noise as much as possible. The test results show that the designed parameters can find the optimal parameters. Zhu et al. [13] designed a high gain converter based on switched capacitor, which has the characteristics of small volume and high efficiency. At the same time, it is applied to the power system of fuel cell vehicles. The research results show that the designed converter has high advantages in efficiency and boost ratio, and can be applied to the powertrain of fuel cell vehicles.
According to the research results of many scholars at home and abroad, stochastic partial differential equations have been applied in various fields, and the research has also achieved corresponding value, but there are still many blank areas in the research of dynamic system noise driving signals, which need to be deeply analyzed. Based on the analysis of stochastic partial differential equation, it is applied to the analysis of noise driving signal of power system in order to provide reference for the modulation of system noise.
Noise driving signal of dynamic system with stochastic partial differential equation
Noise selection and construction of stochastic partial differential equations
Power system noise refers to the signal that the system does not want to receive, which can be divided into white noise, additive noise and multiplicative noise. The relevant characteristics are shown in Table 1. White noise is noise where the power spectral density is constant throughout the frequency domain, and random noise with the same energy density at all frequencies is white noise. Gaussian white noise is one as the classical type of white noise. Additive noise usually refers to scattered noise, thermal noise, their relationship with the signal is the sum of the two, whether or not there is a signal, the noise is present. The sources of additive noise are internal noise, natural noise and man-made noise at three levels. Man-made noise refers to unrelated other signal sources; natural noise is a variety of electromagnetic wave sources that exist in nature; internal noise refers to a variety of noise generated by the system equipment itself. Common random noise can be classified as single frequency noise, impulse noise, and undulating noise. Multiplicative noise is caused by the channel is not ideal, and the relationship with the signal is multiplicative, if the signal exists, the noise will exist; otherwise the noise will disappear. The study focuses on the analysis of degenerate additive noise driven signals based on stochastic partial differential equations.
Several common noise types and characteristics
Several common noise types and characteristics
Given that the performance of an effective dynamical system of stochastic partial differential equations can be affected by the singular perturbation parameters taken and the singular perturbations contained in the linear operator terms. The study analyses two types of stochastic partial differential equations driven by degenerate additive noise under Dirchlet boundary conditions, including two parts, the stochastic partial differential equation obtained from the noise term with singular perturbation and the reaction diffusion equation with linear operator term with singular perturbation, as shown in Eqs (1) and (2) respectively.
In Eq. (1),
In Eq. (2), the constant and Laplace operators are referred to by
The following preparatory knowledge was used for the study, including spatial settings and analytic semigroups, nonlinear terms, additive noise, inequalities and notation [20, 21]. The stochastic partial differential equations in the Hilbert space
Under Definition 1, any
In Eq. (3), the complete orthogonal basis in
Assumption 2 is as follows, setting the resolution semigroup
Lemma 1 is as follows, for any
In Eq. (5), both
It is important to note that
For additive noise, Assumption 5 is as follows, the cylindrical Wiener process on the abstract probability space
At this point, it can be noted that
In Eq. (9), the independent Brownian motion on
Definition 4 is as follows and the O-U process
In Eq. (10),
For the inequality and notation note, Lemma 2 refers to Young’s inequality. When
Lemma 3 refers to the Yöung inequality. Suppose the Lebesgue measurable set is
In Eq. (13),
Lemma 4 refers to Gronwall’s inequality, setting up the non-negative constants referred to by
Definition 5 is as follows, assuming that the set
In Eq. (15),
When the noise intensity and time scale are parallel to the same order, then the system will contain more noise when the degenerate additive noise is transferred to the core model using the non-linear interactions. In the first class of stochastic partial differential equations, the terms in the non-core space formed by the non-linear interactions are overcome by effectively replacing the elements in the non-core space by the ItÔ formulation, which in turn leads to the final effective dynamical system. The process of obtaining the effective dynamical system combined with the singular perturbation of the noise term is specified as follows: the solution of the stochastic partial differential equation is first projected through the operator into the finite kernel space to obtain the core model, and then the effective dynamical system is obtained by eliminating the core model through the ItÔ formula.
Setting the range of values of the existence interval to
The solution of the first type of stochastic partial differential equation can be decomposed as Eq. (17).
In Eq. (17),
In Eq. (18), the Wiener process is
Setting
When
Lemma 5 follows, and the solution to the stochastic differential equation is
Lemma 6 follows, setting
Lemma 6 is as follows, with constants
In Eq. (24),
In the second class of stochastic partial differential equations, the effective dynamical system is obtained using the O-U process similar to the term in the non-core space, which contains the elements in the core space. The process of obtaining the effective dynamical system is specified as follows, firstly the solution of the stochastic partial differential equation is projected through the operator into the finite nuclear and non-nuclear space to obtain the core model, and then the effective dynamical system is obtained by Z-replacement
The solution to this equation is fitness,
The solution of the second type of stochastic partial differential equation can be decomposed as Eq. (26).
In Eq. (17),
The final derivation of Eq. (28) is obtained by replacing the mild solution of
Set
Lemma 7 is as follows, when stopping
Lemma 8 shows that when Definition 1 and Assumption 5 hold, then
Lemma 9 is as follows, setting
In order to prove that the effective dynamic system can approach the original stochastic partial differential equation infinitely, as well as the convergence efficiency and convergence form, the research takes the hot gas machine as an example, and analyzes it from the following aspects. Figure 1 shows the voltage waveform image of the dynamical system for the same parameters at different noise amplitudes. Overall, the fluctuation range of the waveform image increases as the disturbance noise voltage amplitude increases. When the noise amplitude is 20%
Voltage waveforms of power system with the same parameters under different noise amplitudes.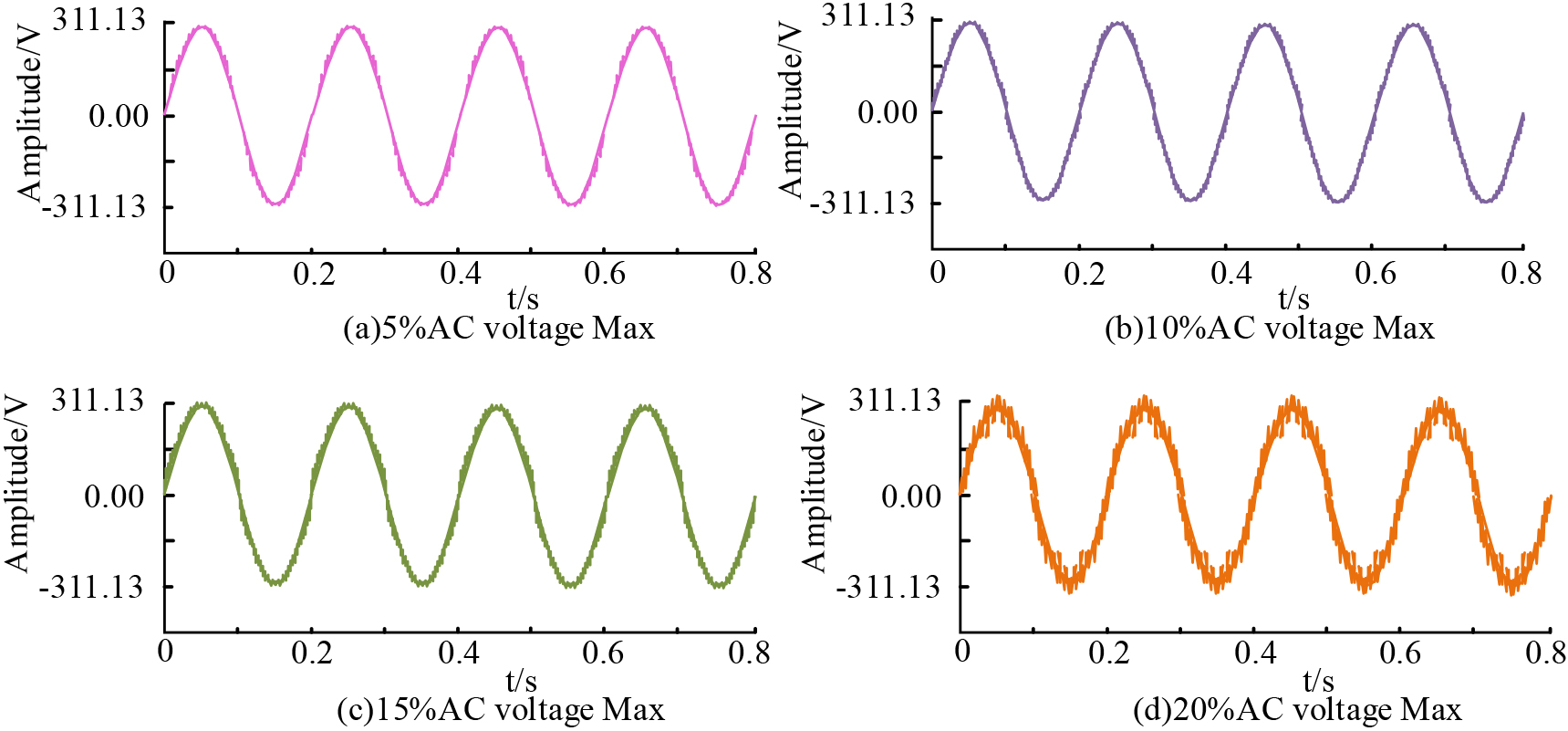
It is assumed that the actual signal contains an AC signal with a DC component of 2 V, frequencies of 50 Hz and 75 Hz, phases of -30 and 90 degrees and amplitudes of 1.5 V and 3 V respectively. The experiment was completed by sampling the electrical signal at 256 Hz, resulting in 320 sampling points. The amplitude-frequency plot and the phase-frequency plot are shown in Fig. 2(a) and (b) respectively. The frequencies of the signals are 0 Hz, 50 Hz and 75 Hz, with peaks at the 1st, 51st and 76th sampling points respectively, while the rest of the sampling points can be approximated as 0. The data is finally processed quickly by the sine formula of the original signal, which can help to identify anomalous data effectively.
Amplitude frequency curve and phase frequency curve.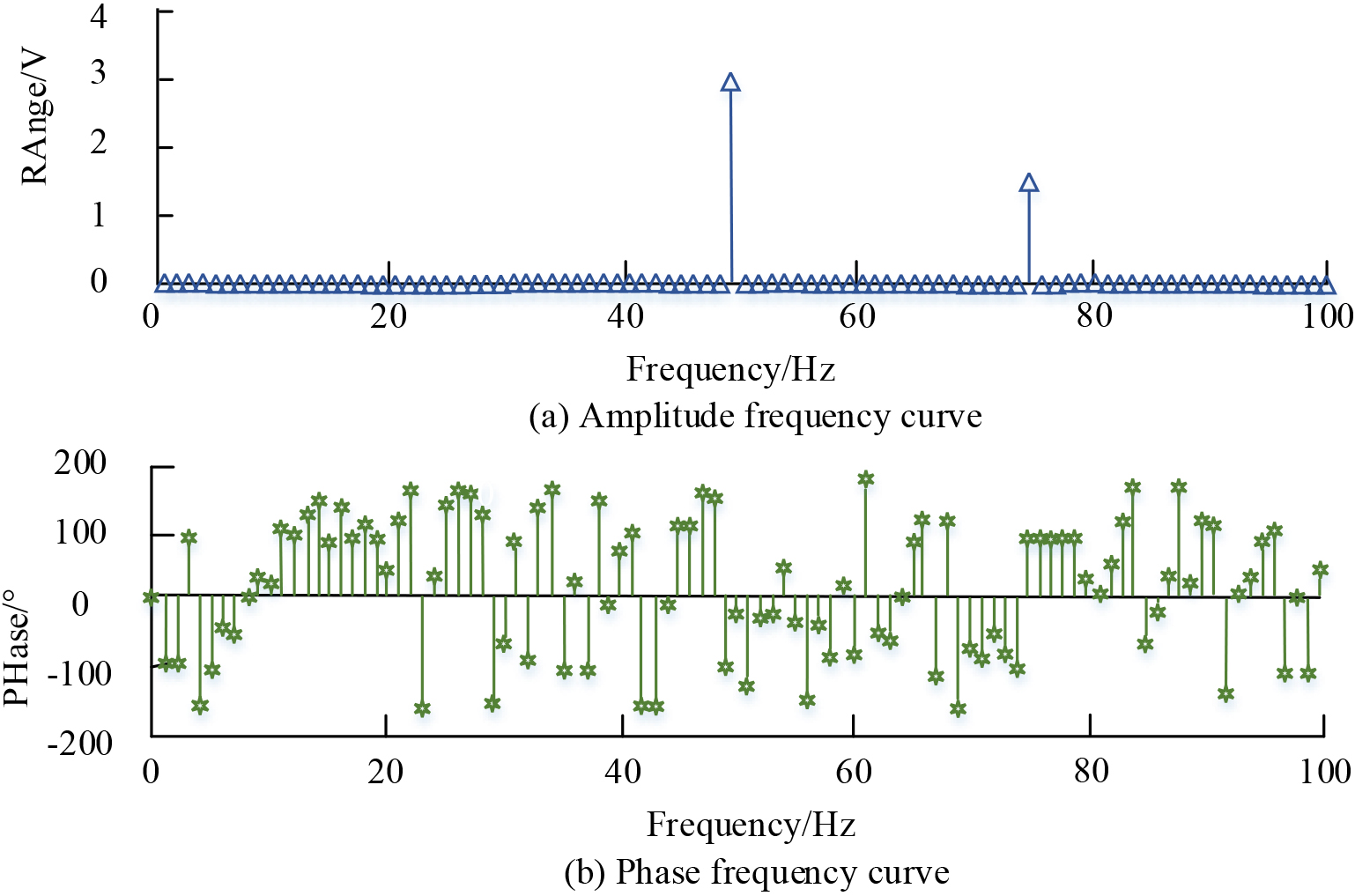
In order to verify the stability effect of the powertrain noise drive, six sampling points of 10, 20, 40, 80, 160 and 320 were selected for analysis in the study, and the experiments were carried out a total of five times and the average value was taken as the final result. The results for the RMS voltage and the initial phase value of the voltage when the noise disturbance amplitude is 5% of the maximum AC voltage are shown in Fig. 3. Figure 3(a) and (b) refer to the error rates of the RMS voltage and RMS current values at different sampling points, respectively. To facilitate the presentation of the experimental results, the study denotes the effective dynamical systems for the first type of stochastic partial differential equations and the second type of stochastic partial differential equations as Strategy 1 and Strategy 2 respectively. To facilitate the confirmation of the reliability of the results, the study set up two methods for comparative validation, namely, the non-local stochastic partial differential equation and the one-dimensional semi-linear stochastic partial differential equation [22, 23, 24]. When the sampling points are 10, 20, 40, 80, 160 and 320 respectively, the error rate of the RMS voltage for strategy 1 and strategy 2 ranges from 1.52% to 4.53%, while the error rate of the RMS voltage for strategy 3 and strategy 4 ranges from 3.26% to 5.03%, and the overall accuracy of strategy 2 and strategy 3 is the highest and lowest respectively. For the initial voltage phase values, the error rate of the initial voltage values for Strategy 1 and Strategy 2 ranged from 0.86% to 11.8% when the number of sampling points was 10, 20, 40, 80, 160 and 320 respectively, while the error rate of the effective voltage values for Strategy 3 and Strategy 4 ranged from 8.65% to 24.10%, and the overall accuracy of Strategy 1 and Strategy 3 were the highest and Strategy 1 and Strategy 3 have the highest and lowest overall accuracy respectively. The error rates of Strategy 1 and Strategy 2 are much higher than those of Strategy 3 and Strategy 4, but as the number of sampling points increases, the accuracy of the RMS voltage and the initial phase value of the voltage calculated by Strategy 3 and Strategy 4 increases, while the accuracy of the RMS voltage of Strategy 1 and Strategy 2 does not change significantly. When the number of sampling points is 240, the accuracy of the RMS voltage and the initial phase value of the voltage is the same for all four strategies.
Noise interference amplitude is 5% of the maximum amplitude of AC voltage.
Noise interference amplitude is 10% of the maximum amplitude of AC voltage.
When the noise disturbance amplitude is 10% of the maximum AC voltage, the results for the RMS voltage value and the initial phase value of the voltage are shown in Fig. 4. Figure 4(a) and (b) show the error rates of the RMS voltage and the initial phase value of the voltage at different sampling points. When the sampling points are 10, 20, 40, 80, 160 and 320 respectively, the error rate of the RMS voltage for strategy 1 and strategy 2 ranges from 1.61% to 4.62%, while the error rate of the RMS voltage for strategy 3 and strategy 4 ranges from 3.36% to 7.13%, and the overall accuracy of strategy 2 and strategy 4 are the highest and lowest respectively. For the initial voltage phase values, the error rate of the initial voltage values for Strategy 1 and Strategy 2 ranged from 7.13% to 13.1% when the number of sampling points was 10, 20, 40, 80, 160 and 320 respectively, while the error rate of the effective voltage values for Strategy 3 and Strategy 4 ranged from 12.68% to 23.16%, and the overall accuracy of Strategy 1 and Strategy 3 was the highest and lowest respectively. and the lowest. The error rate of Strategy 1 and Strategy 2 is much higher than that of Strategy 3 and Strategy 4, but as the number of sampling points increases, the accuracy of the RMS voltage and the initial phase value of the voltage calculated by Strategy 3 and Strategy 4 keeps increasing, while the accuracy of the RMS voltage of Strategy 1 and Strategy 2 does not change significantly. When the number of sampling points is 240, the accuracy of the RMS voltage and the initial phase value of the voltage is the same for all four strategies.
When the amplitude of the noise disturbance is 15% of the maximum value of the AC voltage, the results for the RMS voltage and the initial phase value of the voltage are shown in Fig. 5. Figure 5(a) and (b) refer to the error rates of the RMS voltage and the initial phase value of the voltage at different sampling points respectively. When the number of sampling points is 10, 20, 40, 80, 160 and 320 respectively, the error rate of the RMS voltage for strategy 1 and strategy 2 ranges from 5.23% to 7.96%, while the error rate of the RMS voltage for strategy 3 and strategy 4 ranges from 7.32% to 9.23%, and the overall accuracy of strategy 1 and strategy 4 are the highest and lowest respectively. For the initial voltage phase values, the error rate of the initial voltage values for Strategy 1 and Strategy 2 ranged from 8.96% to 26.81% when the number of sampling points was 10, 20, 40, 80, 160 and 320 respectively, while the error rate of the effective voltage values for Strategy 3 and Strategy 4 ranged from 29.12% to 42.13%, and the overall accuracy of Strategy 1 and Strategy 4 was the highest and lowest respectively. the highest and lowest overall accuracy for Strategy 1 and Strategy 4 respectively. The error rate of strategy 1 and strategy 2 is much higher than that of strategy 3 and strategy 4, but as the number of sampling points increases, the accuracy of the voltage RMS and the voltage initial phase value calculated by strategy 3 and strategy 4 do not change significantly, while the accuracy of the voltage RMS of strategy 1 and strategy 2 gradually decreases. When the number of sample points is 320, there is also a large difference in the accuracy of the RMS and initial phase values of the four strategies. This may be because the instability generated by the noise disturbance amplitude has brought about an impact on the stability of the power system.
Noise interference amplitude is 15% of the maximum amplitude of AC voltage.
When the amplitude of the noise disturbance is 20% of the maximum AC voltage, the results for the RMS voltage value and the initial phase value of the voltage are shown in Fig. 6. Figure 6(a) and (b) refer to the error rates of the RMS voltage and the initial phase value of the voltage at different sampling points, respectively. When the number of sampling points is 10, 20, 40, 80, 160 and 320, the error rate of the RMS voltage for strategy 1 and strategy 2 ranges from 5.26% to 8.96%, while the error rate of the RMS voltage for strategy 3 and strategy 4 ranges from 7.36% to 9.36%, and the overall accuracy of strategy 1 and strategy 4 are the highest and lowest respectively. For the initial voltage phase values, when the number of sampling points is 10, 20, 40, 80, 160 and 320 respectively, the error rate of the initial voltage values of strategy 1 and strategy 2 takes the range of 32.02%–42.31%, while the error rate of the effective voltage values of strategy 3 and strategy 4 takes the range of 34.26%–49.03%, and the error rate of the initial voltage values of strategies 1–4 accuracy were in the range of 32.16%–47.69%. There is also a large difference in the accuracy of the RMS voltage and the initial voltage phase values for the four strategies when the number of sample points is 10, 20, 40, 80, 160 and 320. This may be because the instability generated by the noise disturbance amplitude has already had an impact on the stability of the power system.
Noise interference amplitude is 20% of the maximum amplitude of AC voltage.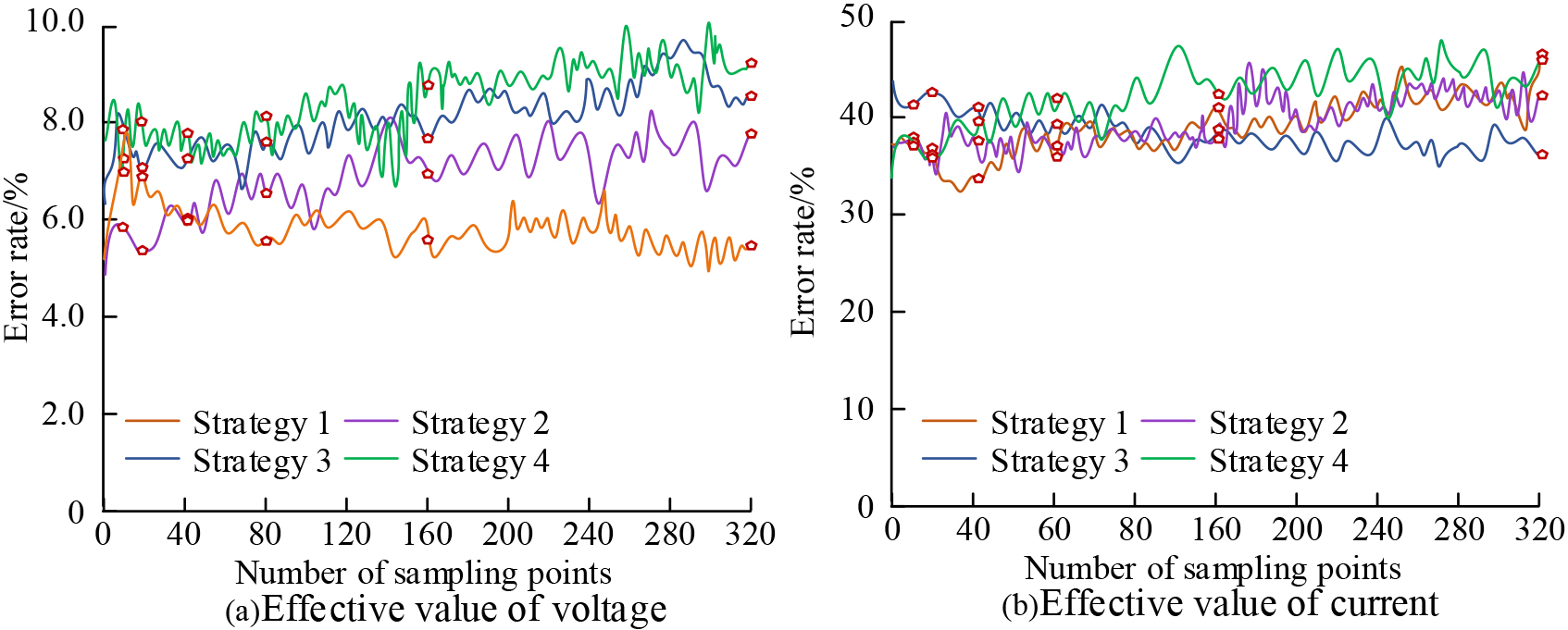
In order to describe the core model of the dynamical system, the study proposes an effective dynamical unity degenerate additive noise drive in combination with stochastic partial differential equations, respectively the noise term and the stochastic partial differential equations with singular perturbation terms for the linear operator. When the noise amplitude is 20% of the maximum AC voltage