
Abstract
As an important future development direction, unmanned agent formation has considerable research value. Therefore, path planning is the key technology for unmanned platforms to realize intelligent navigation, and the scheme combining A* and DWA algorithm has a wide range of applications, but this method has the following problems in the navigation of USV formation: First, the speed of USV are uncontrollable when it reaches the target position; Second, the navigation success rate is low when the global paths of three USVs cross; Third, USV tends to deviate from the global path when turning. Based on the above problems, this paper proposes an improved algorithm. By adjusting the global path and improving the decision strategy, the algorithm solves the shortcomings of the original algorithm and improves the performance. The improved algorithm is simulated and evaluated, which fully proves the effectiveness of the improved measures and puts forward a solution for the intelligent navigation of USV formation.
Introduction
Unmanned surface ship (USV) is an unmanned ship that can be controlled autonomously without manual operation. USV is usually equipped with kinds of equipment, which can perform various tasks on the water. USV has the characteristics and advantages of strong autonomy, versatility, low risk, high efficiency and low cost. With the continuous development of technology, USV has broad prospects in the marine field. Through further improvement and innovation, the autonomy, versatility and intelligence of USV will continue to improve, bringing more opportunities and challenges to marine exploration, resource development and security.
In recent years, the utilization of USV has significantly increased across scientific research, marine monitoring, and national defence applications. Consequently, there has been a growing interest in the development and advancement of USV technologies. Autopilot technology of USV is one of the core technologies, which mainly includes information collection, information processing, autonomous decision making, bottom control and shipshore communication. Among them, autonomous decision making is mainly embodied in path planning. Through information processing, including path information and speed information, automatic navigation routes are generated on the basis of various mathematical algorithms, which not only affects the operational efficiency of USVs, but also affects their navigation safety. Therefore, path planning has become one of the key technologies for autonomous driving of USVs, and attracted the attention of many scholars at home and abroad [1].
Path planning is the core technology of intelligent navigation, in which good obstacle avoidance performance is an important basis for safe navigation. It can collect information according to various sensors and communication systems, and generate efficient and feasible trajectories according to its own performance and environmental conditions, so as to guide USV to reach the target position safely and accurately. Therefore, the global path planning is regarded as the main navigation mode in the known largescale environment, while the local path planning is regarded as the navigation mode in the local unknown environment, and the two are combined to realize autonomous navigation in the comprehensive environment. For the global planning of path points, traditional algorithms mainly include visibility method [2, 3], grid method [4], A* [5], particle swarm optimization algorithm [6, 7, 8], genetic algorithm [9, 10, 11], gray wolf algorithm [12] and so on. Meanwhile, the common local path planning algorithms are as follows: PFM algorithm, DWA algorithm, TEB algorithm [13], VFH algorithm [14] and so on.
In the above path planning algorithm, the scheme of combining A* algorithm with dynamic window DWA is mature and reliable, and can achieve ideal results in the application of USV autonomous navigation.
Liu et al. [15] modified the heuristic function to evaluate the time variable, which improved the smoothness of the global path in complex environment. Zhou et al. [16] optimized and improved the heuristic function in A* algorithm, taking the safety distance as the evaluation content, and the smoothed path fully considered the safety, which improved the performance of the fusion algorithm. Yang et al. [17] analyzed and evaluated the related errors when A* and DWA fusion algorithms were applied to single USV. Liu et al. [18] proposes a fusion algorithm that combines the kinematical constrained A* algorithm with the DWA algorithm. The kinematical constrained A* algorithm can plan the global path, and then the DWA algorithm can plan the local path under the global path’s guidance. Zhao et al. [19] improved and optimized the A* algorithm, filtered and deleted the turning points in the global path that were not conducive to navigation efficiency, and improved the smoothness of the global path, thus improving the overall performance of the fusion algorithm. A* algorithm is optimized by weight to improve the search efficiency, and DWA algorithm is adapted to the motion characteristics of ships, thus improving the efficiency and safety of single USV navigation [20]. In addition, literature [21] improved RRT algorithm and combined it with GWO, I-GWO and Ex-GWO algorithms respectively, and simulated it on multiple UAVs and multiple types of maps, which also achieved good results. R. Han et al. [22] applied the DRL to the complex environment of multi agent navigation, and the cluster navigation can be realized through iterative training.
The above A* algorithm, DWA algorithm, RVO algorithm, DRL algorithm, GWO algorithm, RRT algorithm and so on are widely used in unmanned agents. Compared with the DRL algorithm, A* algorithm, RRT algorithm and GWO algorithm require less computation and do not need pretraining process. RRT algorithm and GWO algorithm have stronger adaptability in the path planning of 3D complex space, and are suitable for the path planning task of UAV group. A* algorithm is easier to get a more ideal global path, so it has a more ideal effect on USV moving in a relatively simple 2D environment. At the same time, as an underactuated motion system, USV needs to take extra consideration of its manoeuvrability in path planning, so DWA algorithm can show excellent performance in path planning of USV.
To sum up, the fusion algorithm of A* and DWA has high research value in USV control. On the basis of this algorithm, our team improved it, realized the course control of USV at the target position, and solved the coordination problem during the meeting of two USVs [23]. However, the traditional algorithm still has the following problems: First, the speed of USV is uncontrollable when it reaches the target position. This means that after USV reaches the target position, it still needs a certain amount of time and space to match the speed uniformly, which reduces the efficiency. Second, the navigation success rate is low when the global paths of three USVs cross. Global path crossing may lead to the failure to maintain a safe distance during each USV navigation, which increases the navigation risk. Third, The DWA algorithm ensures the navigation safety of USV by setting a larger prediction period parameter, which leads to the USV turning ahead of time in the fusion algorithm, which forms a big deviation from the global path.
Therefore, this paper improves the fusion algorithm according to these problems. Firstly, by adding the key point of global path, the target guidance section is formed and extended to realize the control of the course and speed; Secondly, by improving the encounter coordination strategy, the problem of encounter coordination of three USVs is solved; Thirdly, by extending the global path of the navigation section, the trajectory of USV during turning manoeuvre is optimized to reduce the track offset.
This paper aims to optimize the algorithm, so that the advantages of the algorithm itself can be applied to the multi-USV environment. In view of the new direction and trend of the current research on multi-USV intelligent navigation control, a reliable and efficient solution is proposed for the intelligent navigation control of USV formation.
Besides this chapter, this paper is arranged as follows: The second chapter mainly introduces the traditional A* and DWA fusion algorithm and also analyzes the existing problems. The third chapter mainly introduces the improvement of the fusion algorithm. The fourth section mainly carries out simulation experiments on the improved algorithm. The fifth chapter mainly summarizes and analyzes the improved algorithm. The innovation of this paper mainly lies in the improvement and optimization of traditional A* and DWA algorithms to make them suitable for complex USV formation movement scenes, and to improve the accuracy and efficiency of USV formation navigation.
The traditional A* and DWA fusion algorithm and its existing problems
Traditional A* and DWA fusion algorithm
The traditional fusion algorithm firstly uses A* algorithm to get the global path according to the surrounding known environment. The global path is discretized according to different accuracy. High precision is conducive to achieving more efficient navigation. Discrete points are used as local guide points of DWA algorithm in sequence, and through continuous traversal of each cycle, USV is guided to avoid obstacles and finally reach the target. As shown in Fig. 1.
Traditional A* and dynamic window fusion algorithm.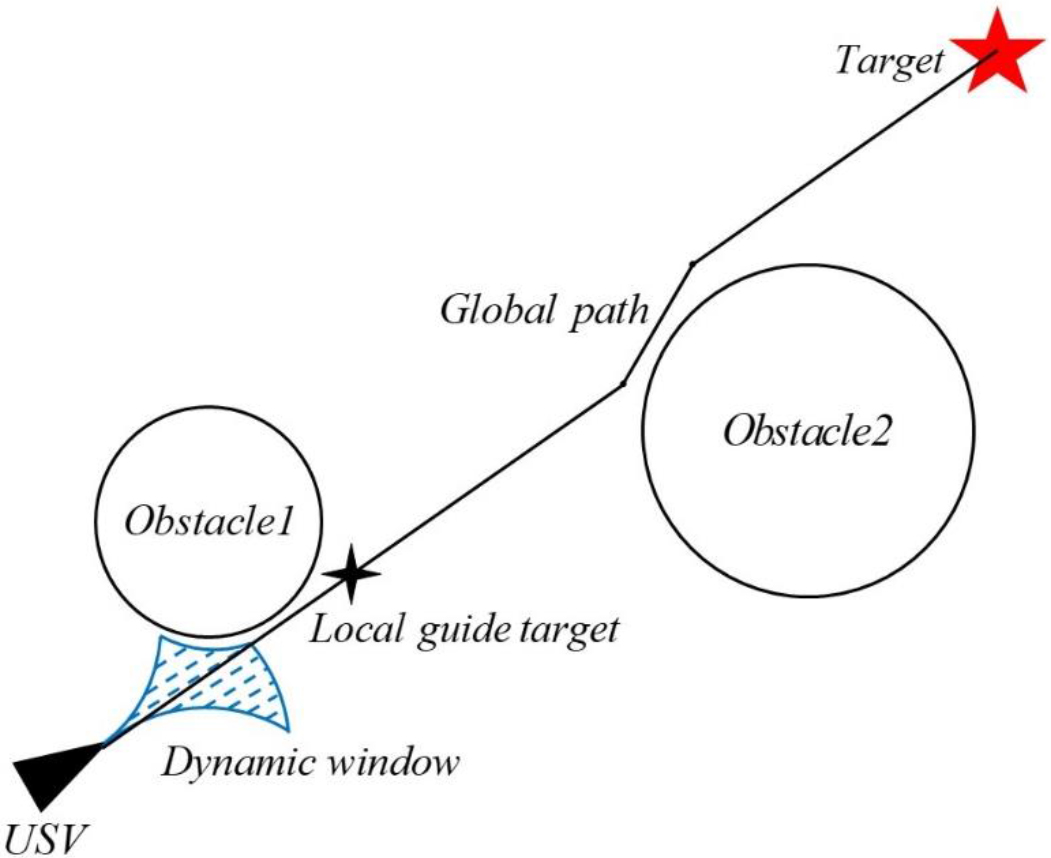
Speed control defects when reaches the target position
In the traditional fusion algorithm, when that local target position traverse to the target position and the edge of the dynamic window intersects with the target position, the end point of the local path will always coincide with the target position, the range of dynamic window and the length of local path decrease continuously, because there is a positive correlation between local path and linear velocity, therefore the USV starts to decelerate near the target position and stops at the target position, as shown in Fig. 2. However, the actual movement of USV on the water surface is a relatively dynamic process, which is always affected by wind and waves. It is difficult for USV to keep stable at low speed, which poses a threat to navigation safety.
Dynamic window and local path change in traditional algorithms.
In addition, in the formation movement of USV, the uniform course and speed are usually adopted to maintain a relatively fixed formation. When USV reache the target position, The traditional fusion algorithm can’t control the speed of USV when it reaches the target position, so it is necessary to carry out additional speed matching when starting the formation movement. This work needs to be completed on the basis of maintaining formation, so it needs more complicated algorithms and strategies. To sum up, the traditional algorithm can’t match the speed of USV in the formation movement, which makes the subsequent formation movement of USV more difficult and less efficient.
The traditional fusion algorithm has a low success rate of obstacle avoidance in the situation of encounter of three USVs. In this situation, the dynamic windows of the USV intersect. According to the characteristics of the traditional fusion algorithm, the USV will tend to maintain the current speed for steering maneuver collision avoidance, but the algorithm cannot coordinate the steering maneuver direction of the USV. Easy to cause USV to form an urgent situation during collision avoidance, which increases the threat to navigation safety and reduces navigation efficiency. As shown in Fig. 3.
The situation of encounter of three USVs.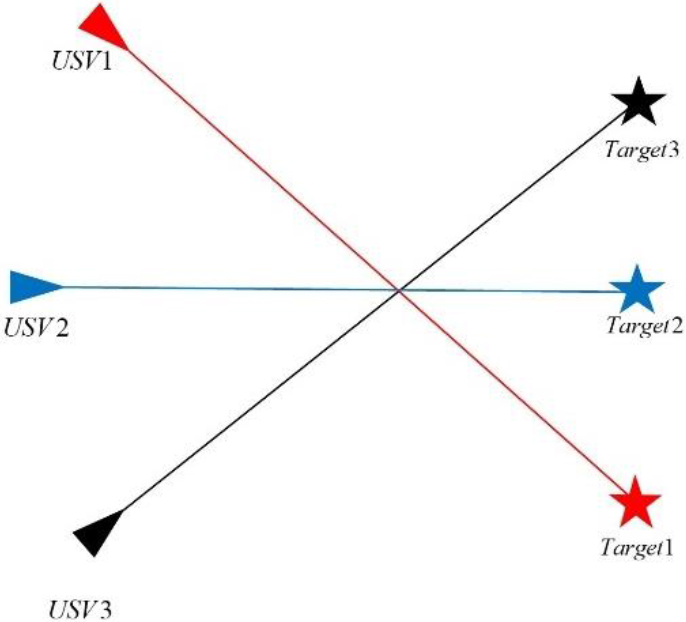
In the traditional fusion algorithm, when the local guide target reaches the turning point, the USV will traverse along the guiding segment in the next time cycle, and the USV will start to turn. If the distance judgment parameter between the USV and the local guide target is set too large, the USV will turn too early, resulting in a significant deviation between the actual trajectory and the global path. At the same time, the algorithm fails to fully utilize the maneuverability of the USV to follow a trajectory that is more closely aligned with the global path. The greater the
Traditional algorithm steering path deviation.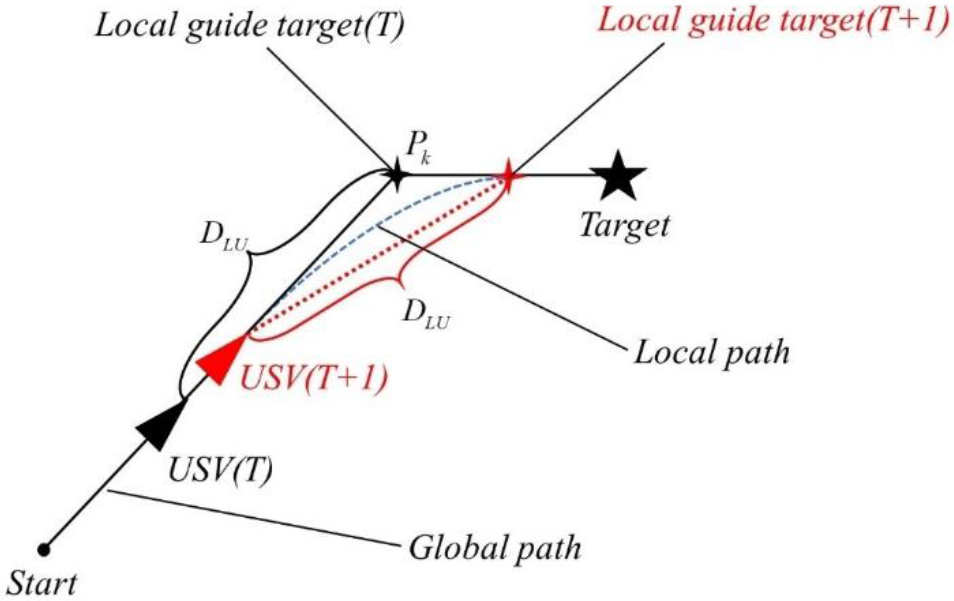
Optimization of terminal speed control
In the traditional fusion algorithm, the local path length
In addition, under the condition of straightline navigation of USV, if the distance between local guide target and USV is
Situations between local guide target and dynamic window.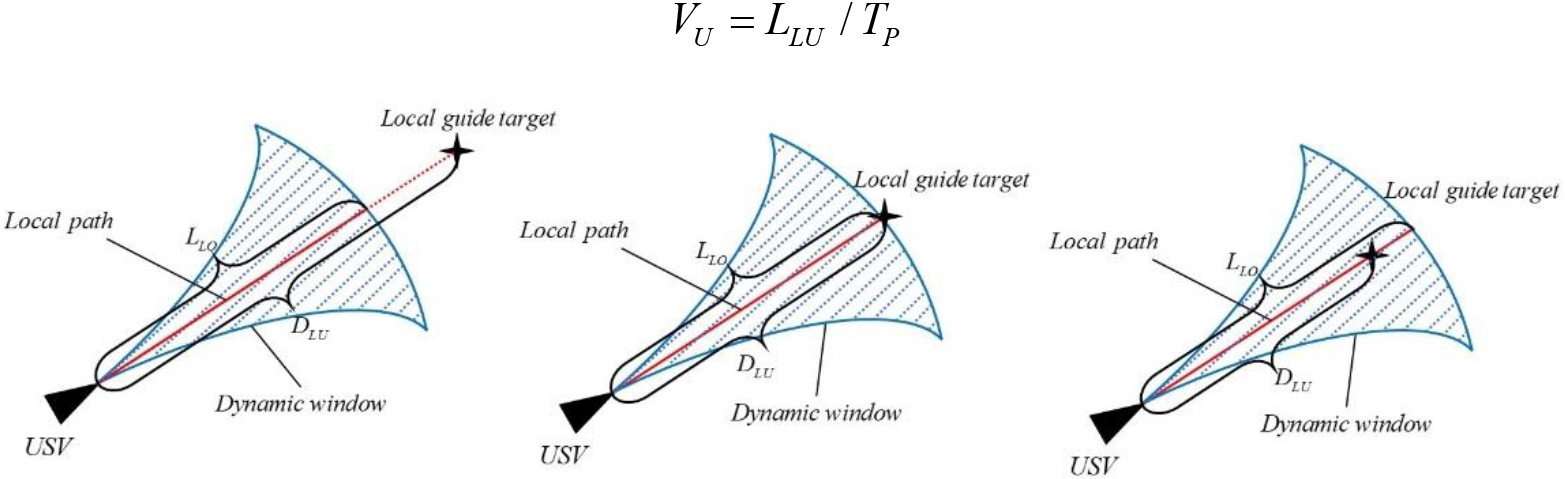
To sum up, by changing the size of parameter
Extend the guide path of the global path.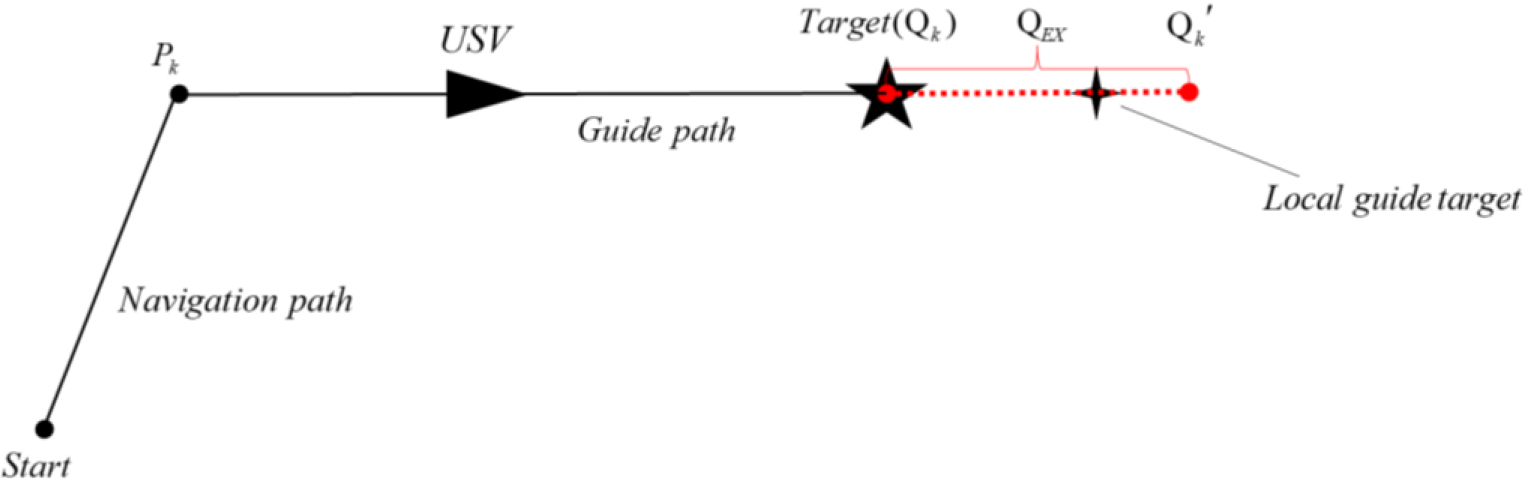
The distance parameter
Because of the existence of the judgment area, the distance between USV and target point is greater than the theoretical value, which makes the expected speed higher. Therefore, to achieve more accurate speed control, a correction coefficient
Relationship between actual value and theoretical value of parameter.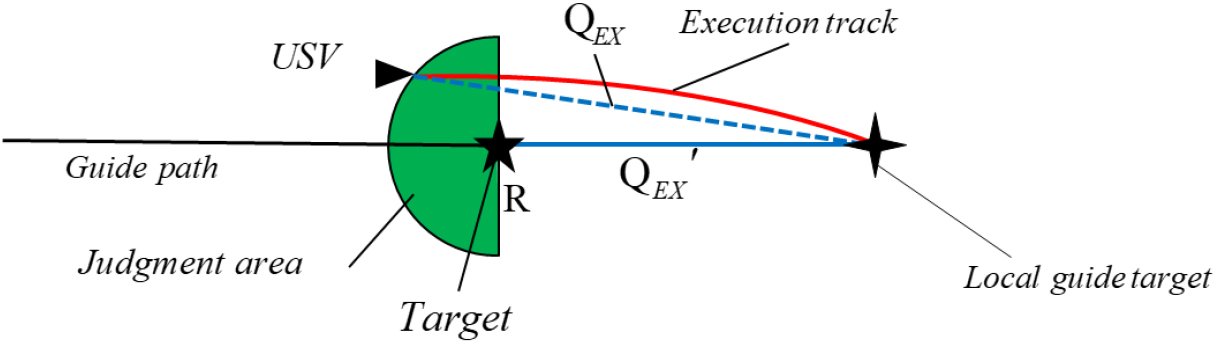
Therefore, the more accurate parameter
In ideal situation,
To solve the encounter problem in USVs navigation, reference [23] introduced encounter coordination strategy. This strategy determines the priority of navigation by comparing the chord angles of the relative positions between USVs. As shown in Fig. 8,
The chord angles of the relative positions between USVs.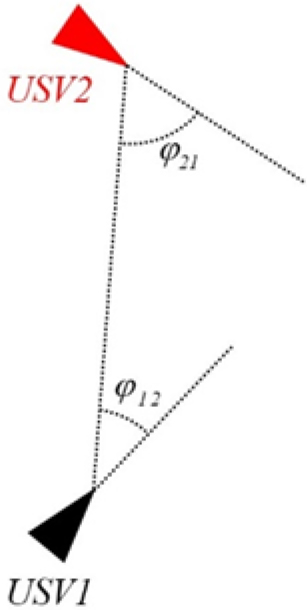
However, this strategy only considers the scene of two USVs, in order to adapt to more complicated situations. Therefore, based on the core idea of this strategy, this paper takes deceleration as the main avoidance mode, and improves it on this basis, so that it can be applied to more complex scenes of three USVs: firstly, set the encounter judgment parameters Dist3 and Dist2 to judge the situation that three USVs encounter and two USVs encounter respectively.
Let the distances between the local guide target of three USVs be D12, D13 and D23, then when D12, D13 and D23 are all smaller than Dist3 and larger than Dist2, it is determined that three USVs are in an encounter situation; When any one of D12, D13 and D23 is less than Dist2, it is determined that two USVs are in an encounter situation.
In the case that three USVs encounter situation, by comparing the navigation priorities with each other. And stop traversing the local guide target of the USV with the lowest priority. Therefore, this USV will slow down and avoid, and the other two USVs will continue to sail normally until their mutual distance is less than Dist2. At this time, the two USVs still make one USV slow down and avoid through priority comparison. As shown in Fig. 9.
Improved encounter coordination strategy.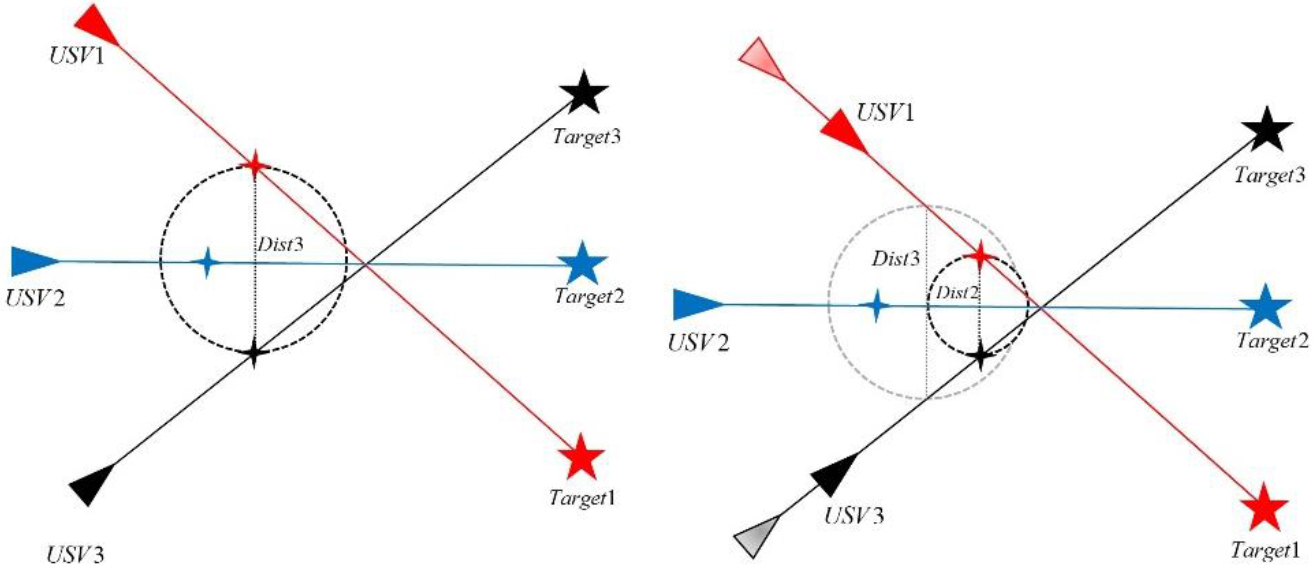
Extend the navigation path of the global path.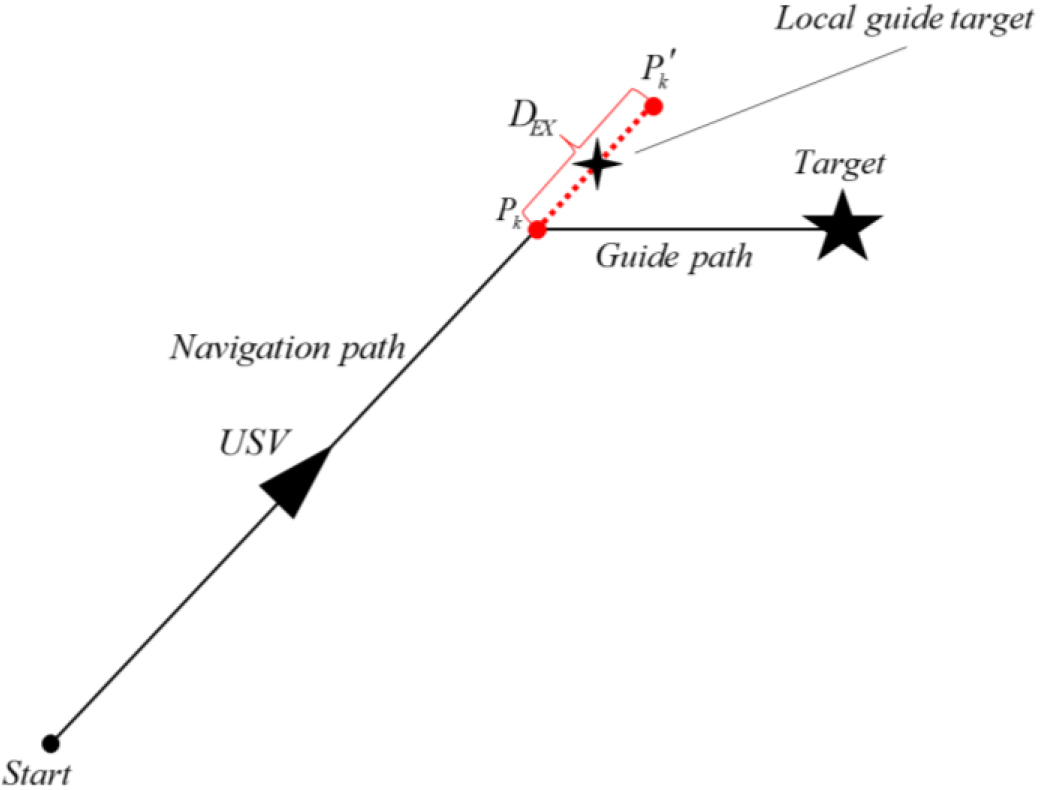
In Fig. 9, USV2 has the lowest navigation priority, and takes the lead in deceleration maneuver. USV1 and USV3 sail normally until their local guide target enter the judgment interval, and then compare the priorities.
USV kinematic parameters
Fusion algorithm parameters
Local path comparison after optimization.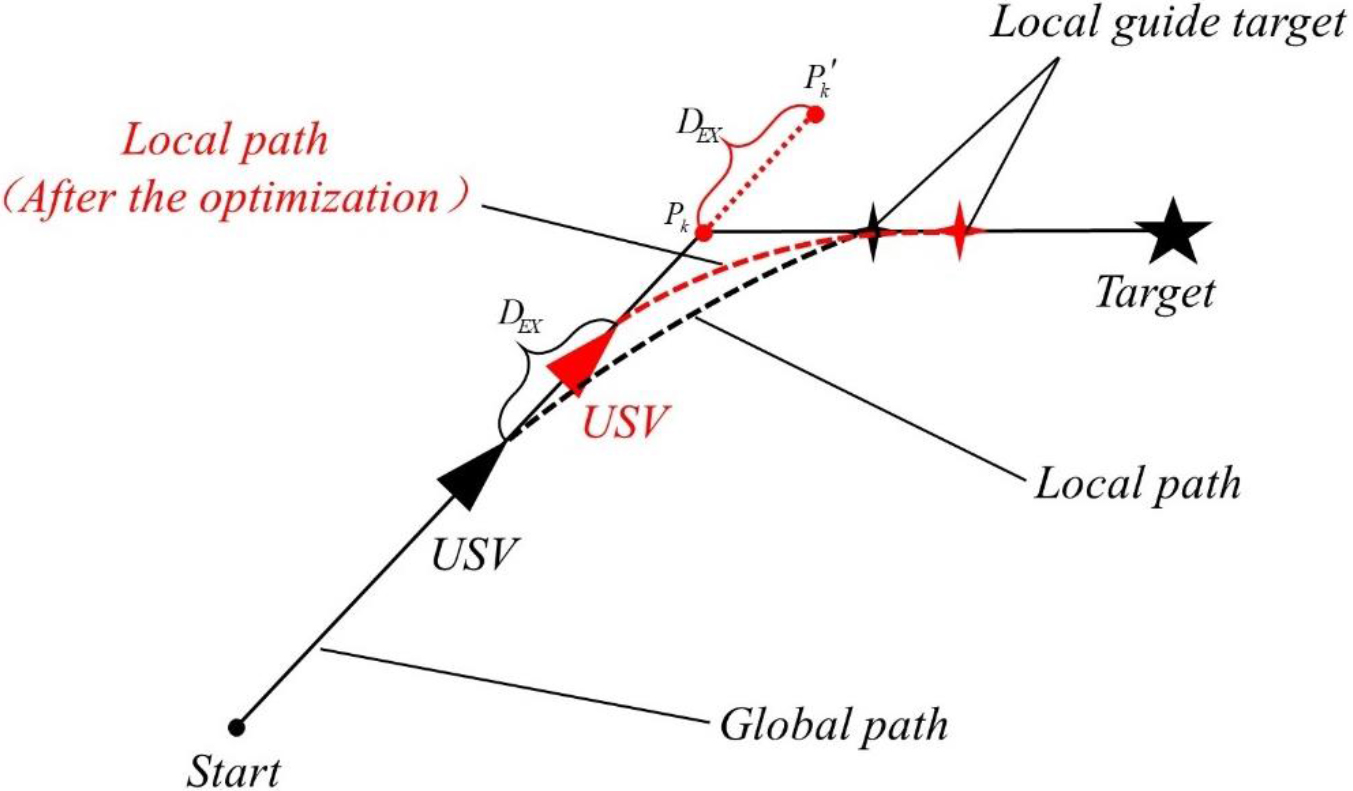
Experimental scene of speed control.
Linear velocity comparison (4kn, 8kn, 12kn expected speed of USV).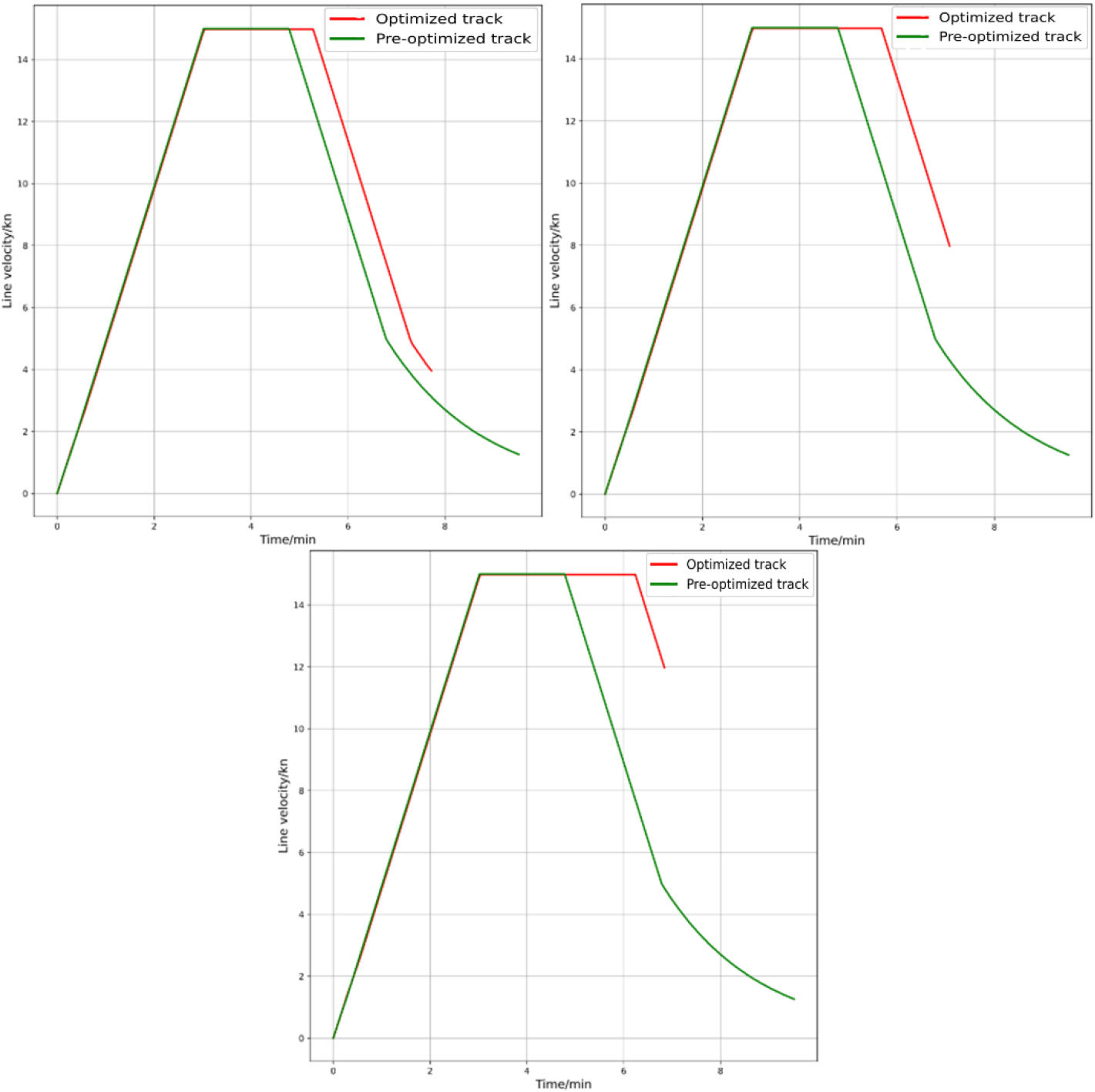
In the traditional algorithm, if the turning time is delayed, it is necessary to reduce the value of parameter
The elongation distance parameter
The track of USV through narrow channel.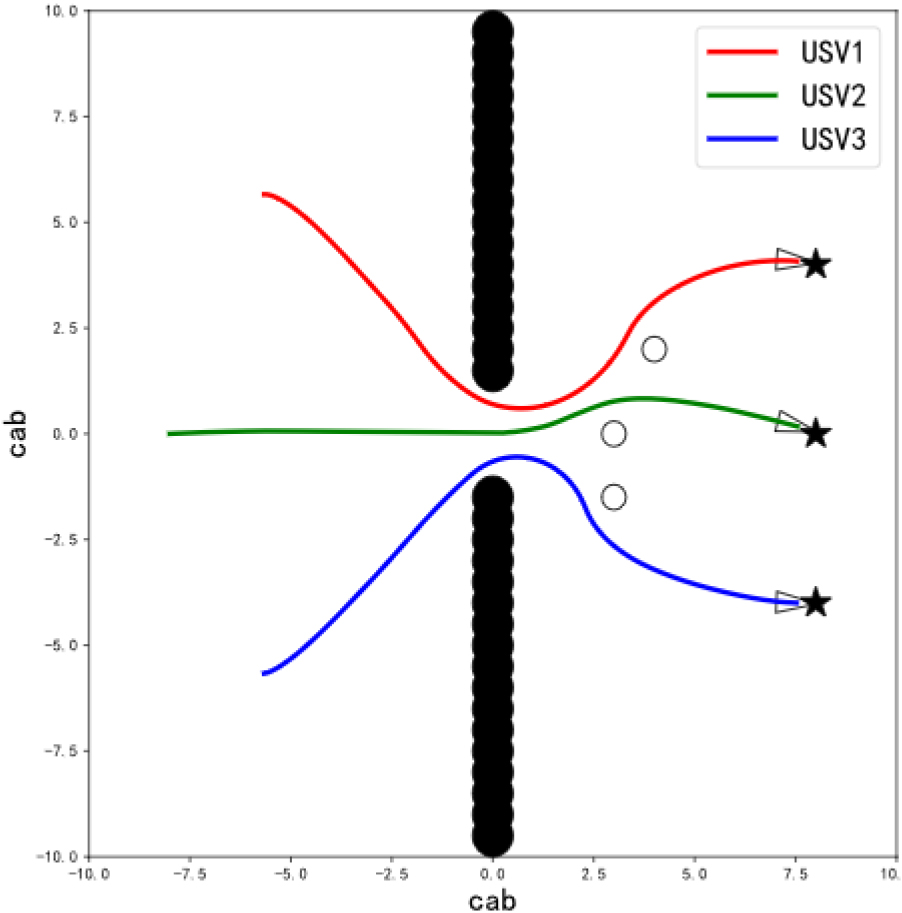
Distance of each USV and collision threat distance.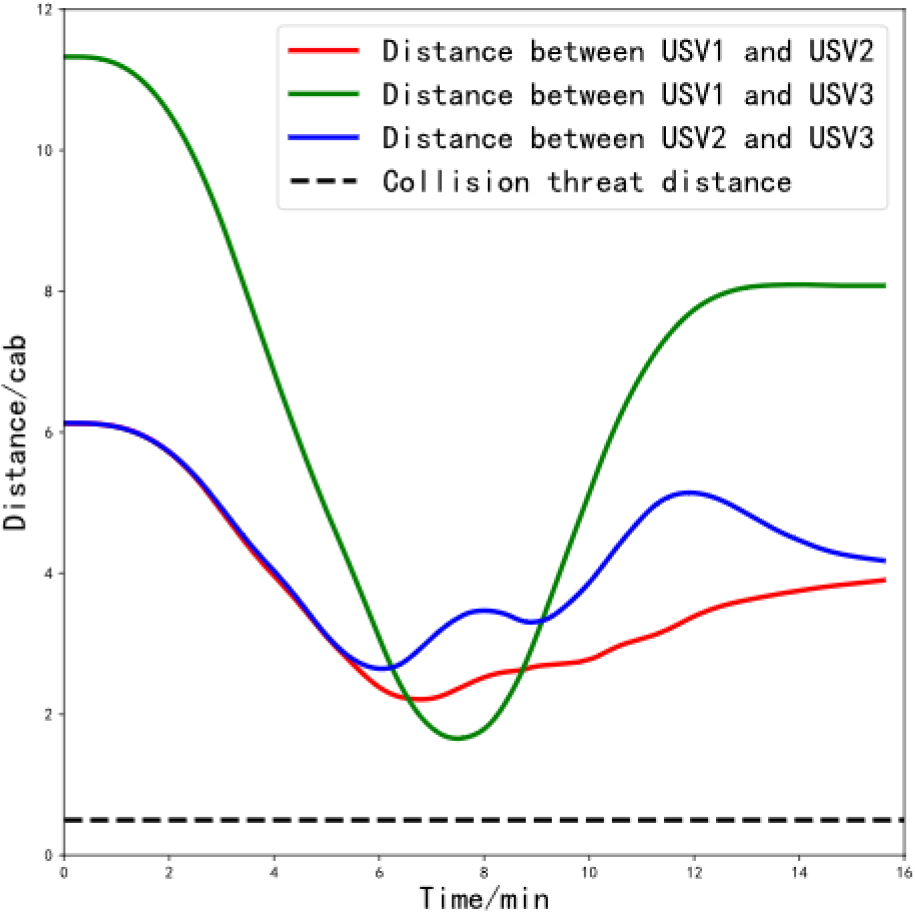
Comparison of simulation experiment parameters
Speed of each USV.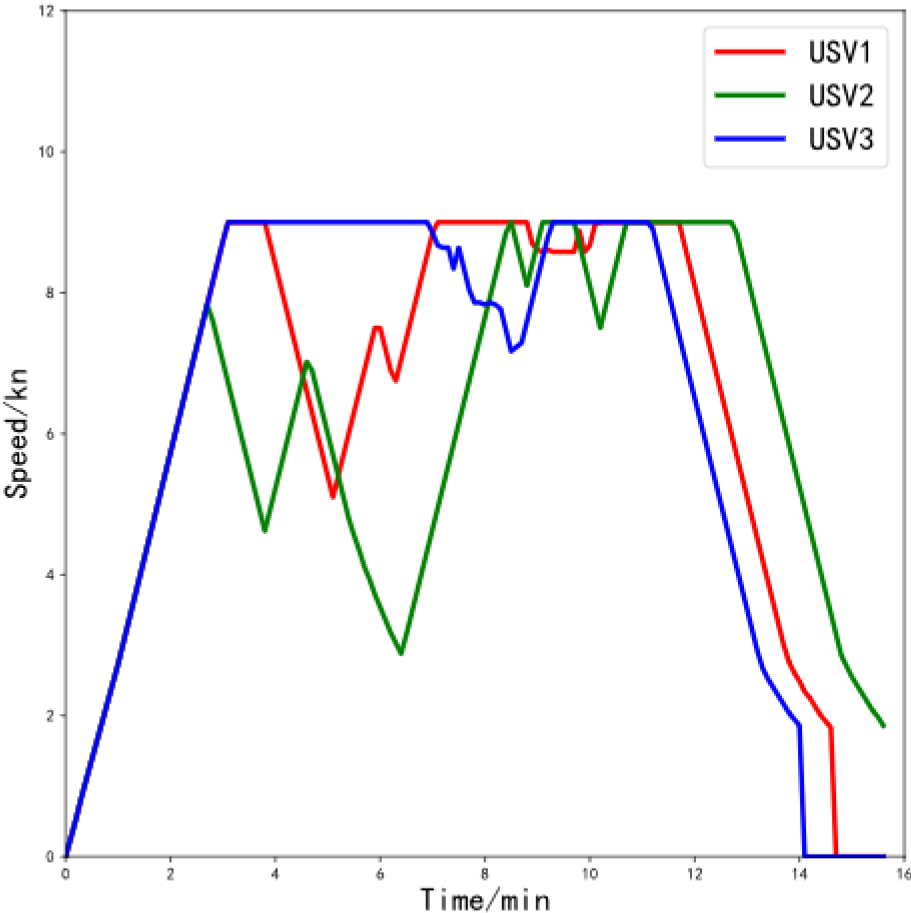
Track comparison (30∘, 60∘, 90∘ steering maneuver).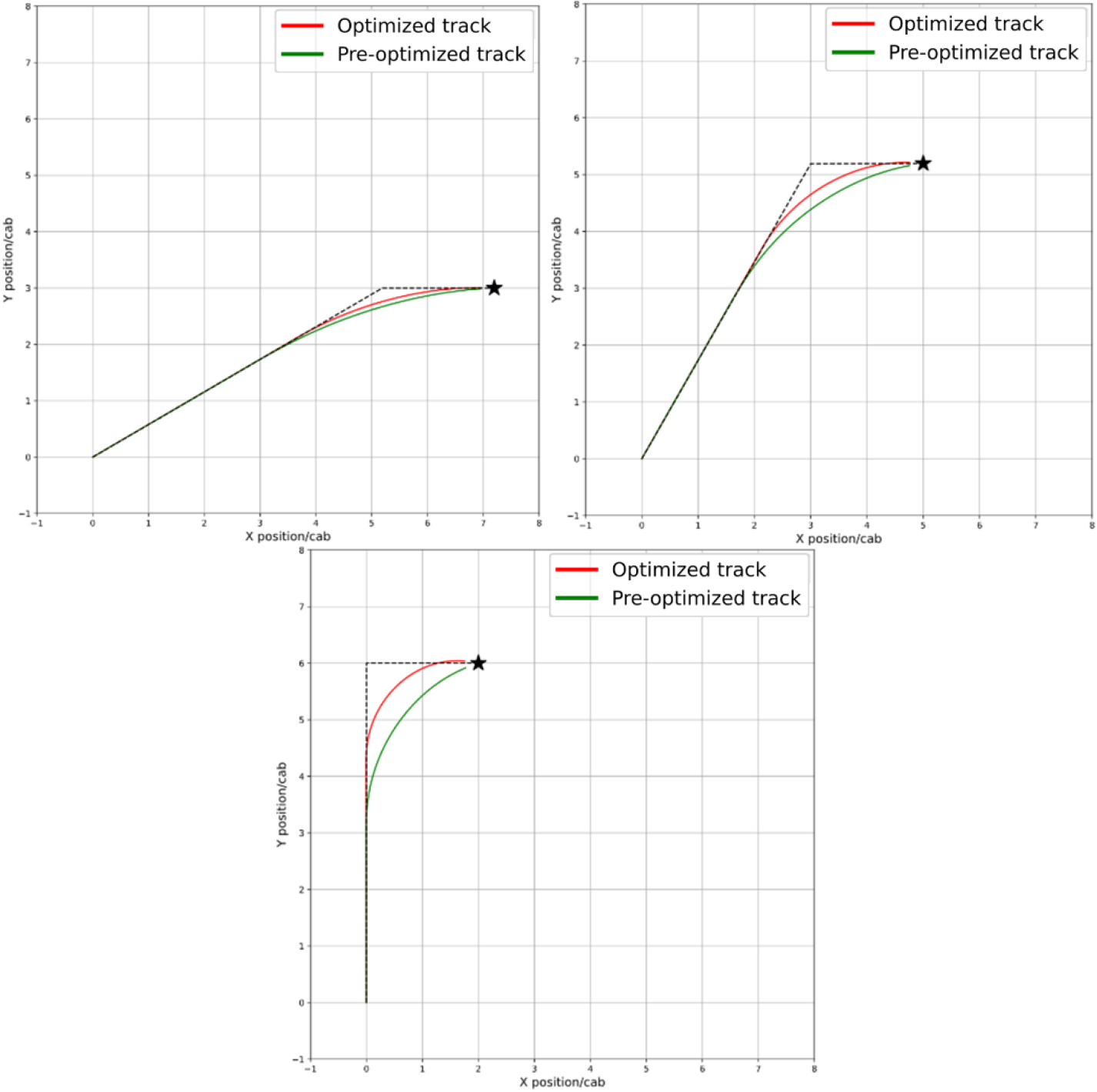
Distance between track and turning point (30∘, 60∘, 90∘ steering maneuver).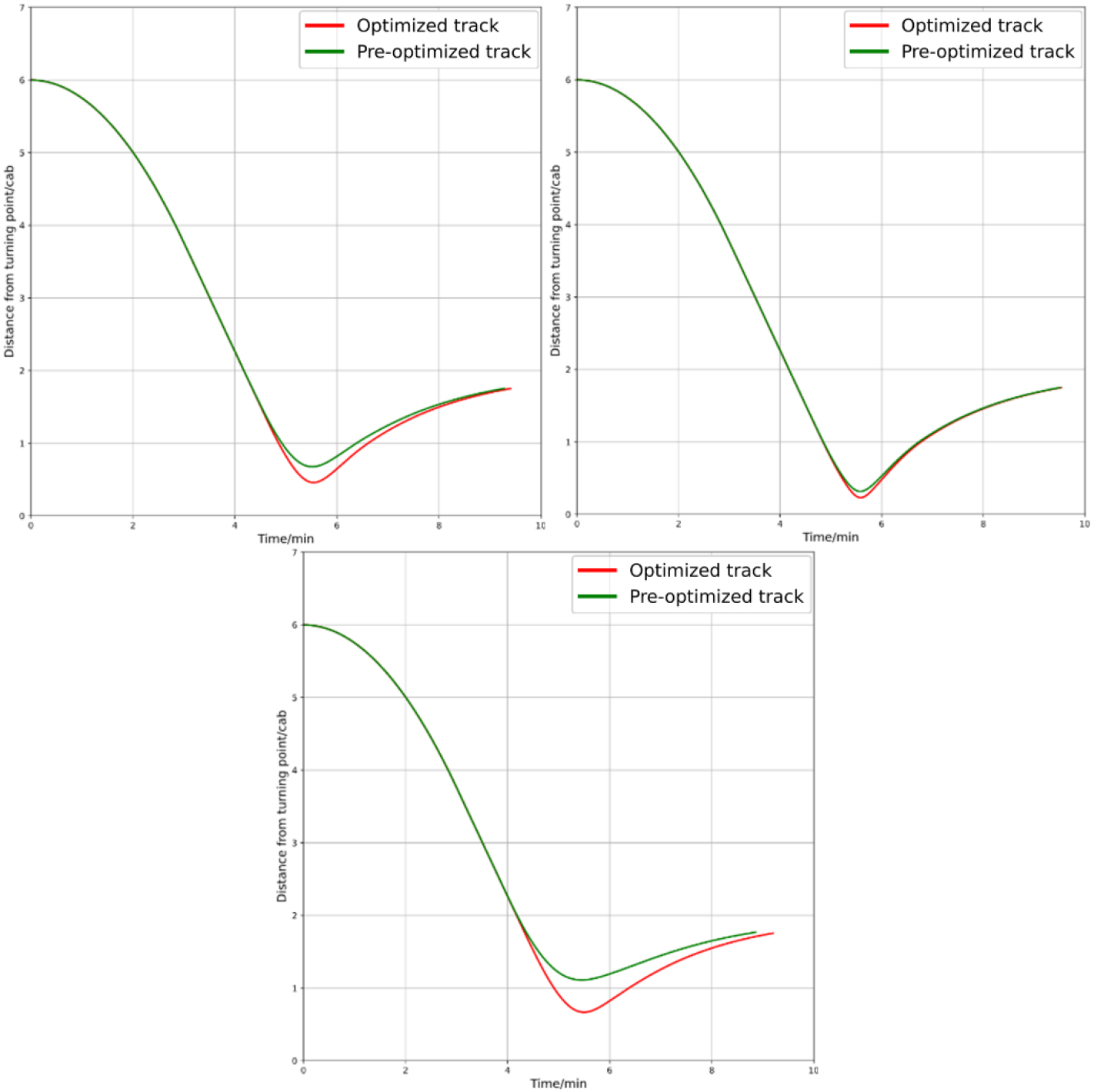
Angular velocity comparison (30∘, 60∘, 90∘ steering maneuver).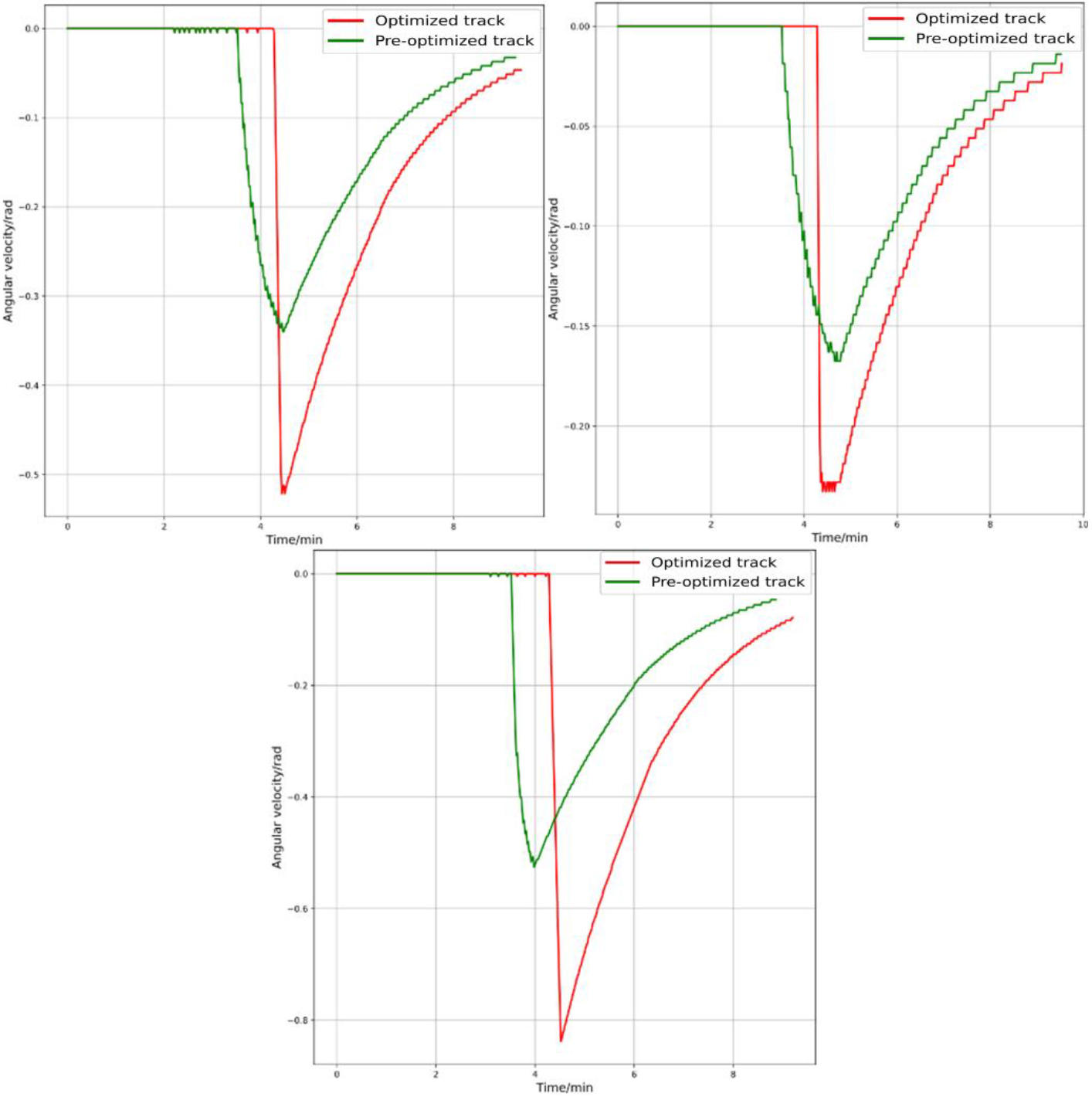
The track of USV through narrow channel.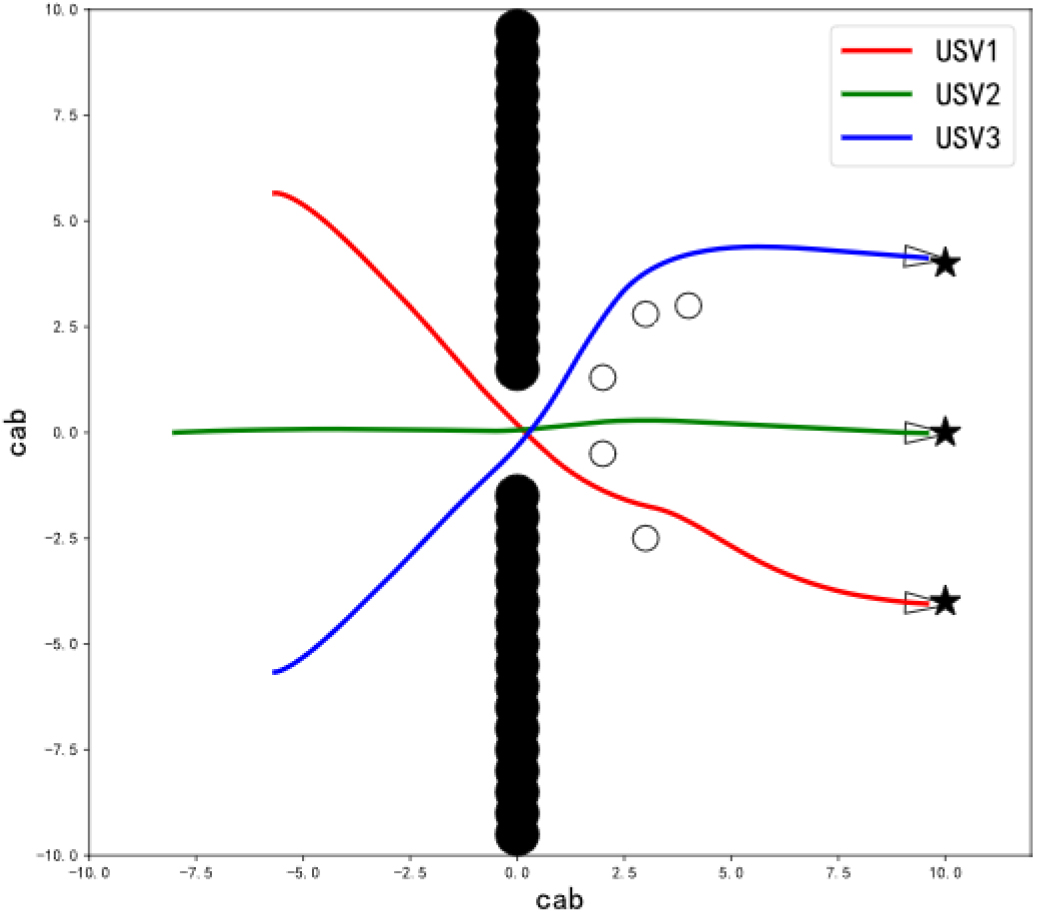
Distance of each USV and collision threat distance.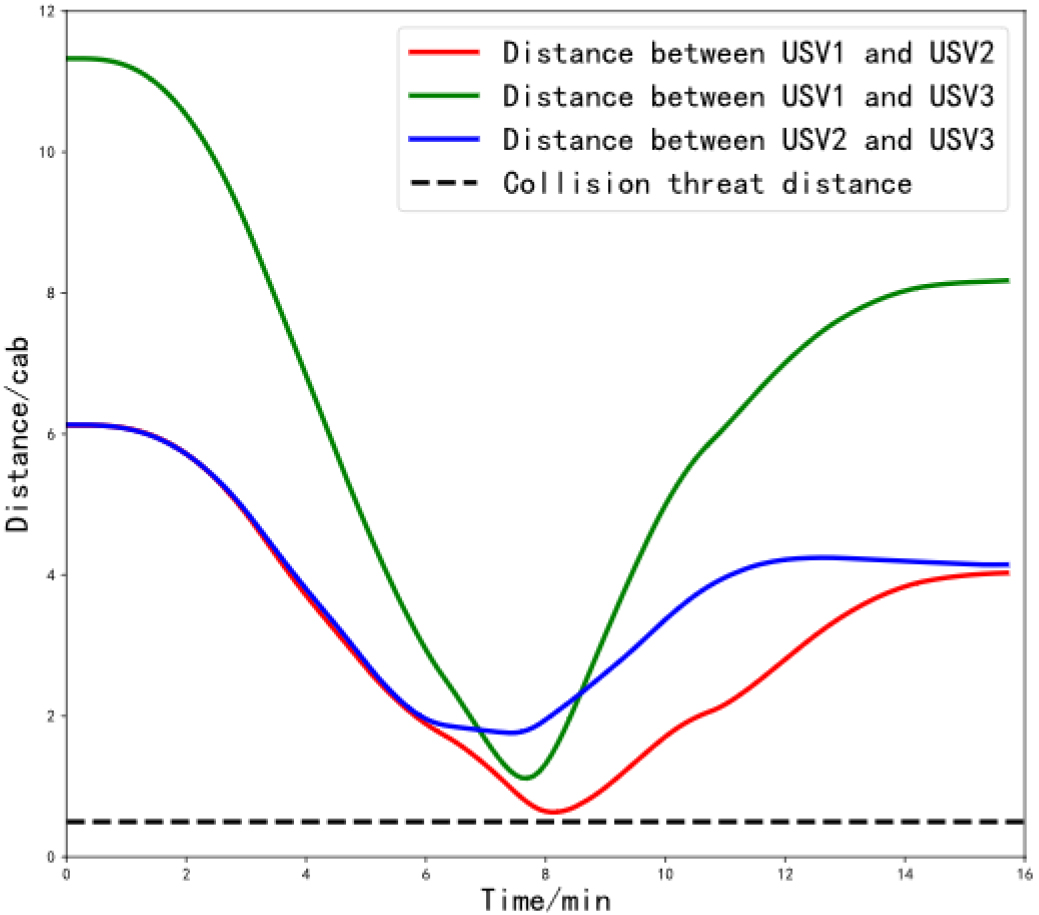
Course of each USV.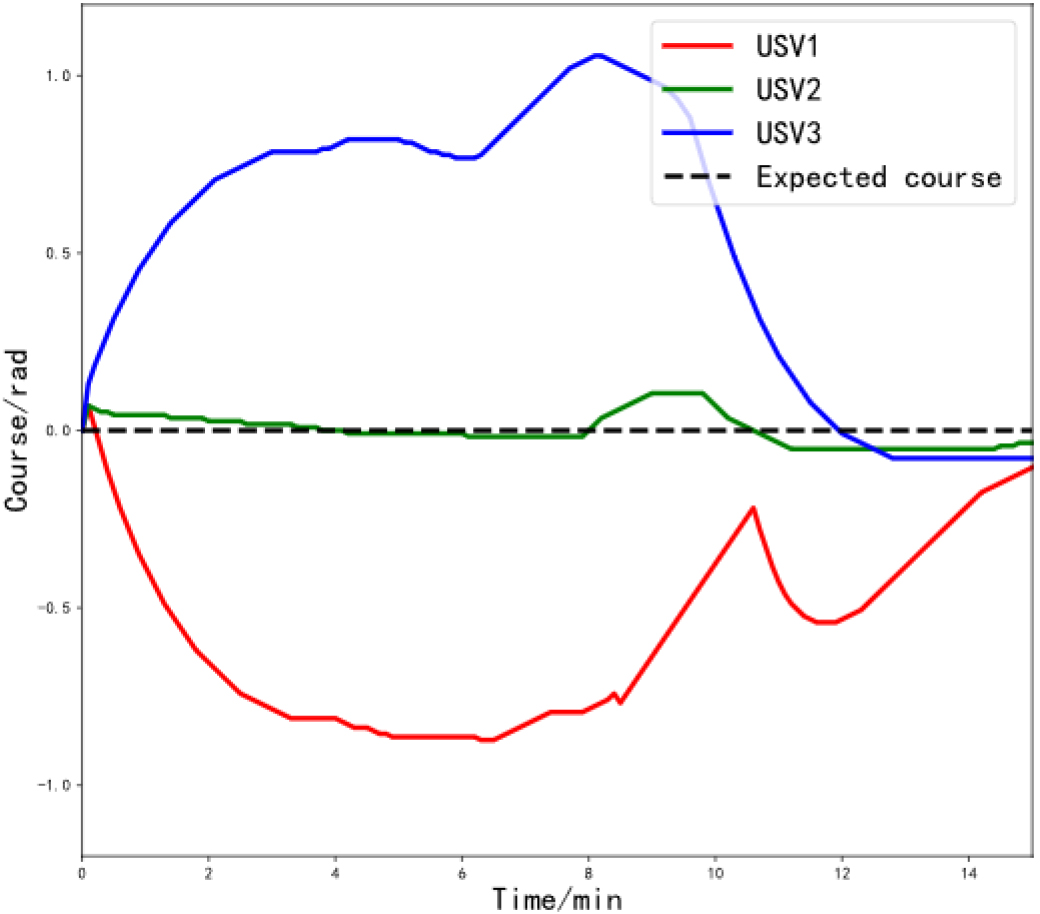
Course of each USV.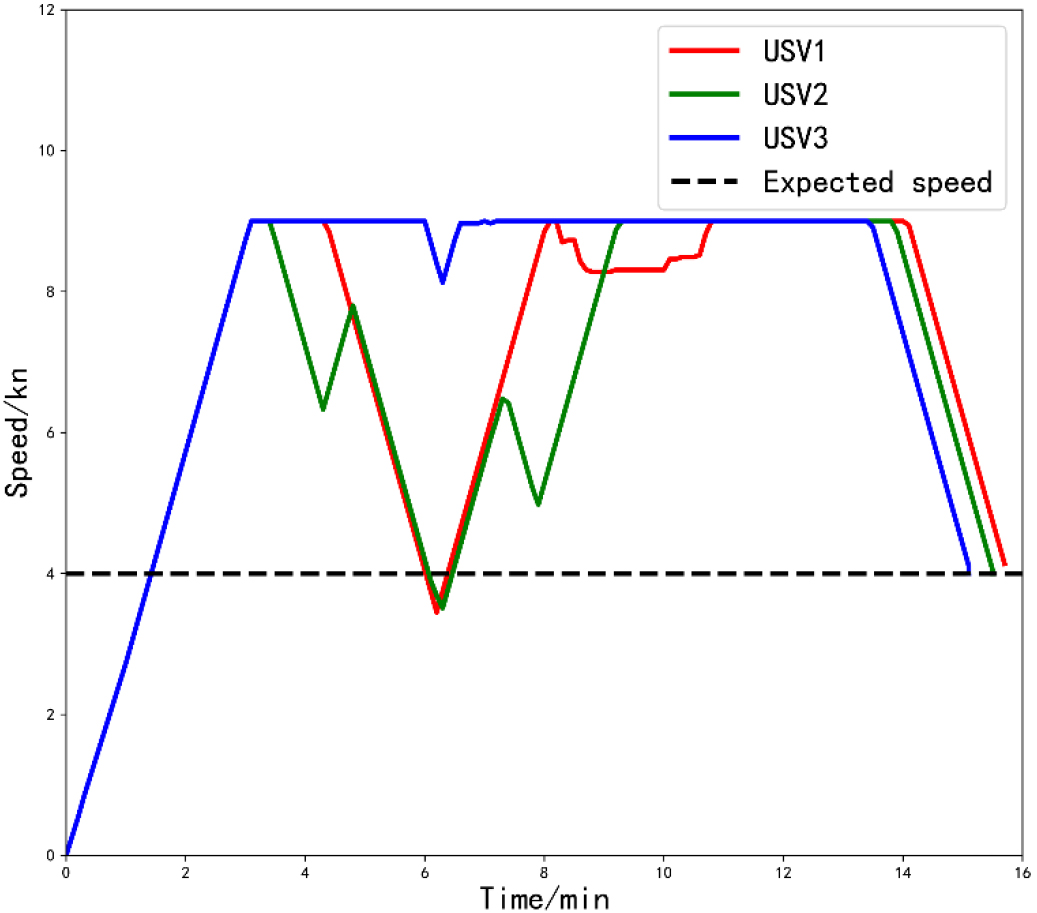
To verify that the improved fusion algorithm can enhance the control effect on USV, and better fit the actual scenarios of USV, comparative simulation experiments were conducted in a Python environment between the improved fusion algorithm and the tradition algorithm. The results were then analyzed. Considering that USV is mostly a small target, the sailing speed is mostly below 15 knots, and the maneuverability of steering and acceleration and deceleration is weak compared with other types of targets, it is set as a typical small surface target parameter. The kinematic parameters and algorithm parameters are shown in Tables 1 and 2, respectively.
Experiment verification of optimized designated target position speed
Create the environment according to Tables 1 and 2, as shown in Fig. 12. The experiment was conducted with the speed control reference values of 4kn, 8kn and 12kn for the optimization algorithm. The results of comparing the two algorithms are shown in Fig. 13.
The following conclusions can be drawn from the experimental results:
By extending the guide path, the overall speed of the USV navigation is improved, resulting in reduced time and increased navigation efficiency. The higher the expected speed at the target point, the later the deceleration time of USV and the shorter the task time. After optimization, the acceleration and deceleration range of USV is larger, which avoids the low-speed range and realizes the control of USV with larger maneuvering parameters. By adjusting the value of
In order to verify the effectiveness of this strategy in a complex environment, a complex environment in which three USVs pass through a narrow passage is established according to the above conditions. Channel width is 2cab, and there are three anchored ships outside the passage. The experimental results are shown in Figs 14 to 16.
In Figs 14 to 16, under the guidance of the improved algorithm, the three USVs successfully passed through the narrow passage and reached the target position. During the navigation, the three USVs kept a safe distance from each other, and the nearest encounter distance was 1.4cab, which fully reserved maneuvering avoidance space and realized safe navigation. According to the strategy, USV2 and USV1 take the initiative to slow down and avoid at t
Experimental verification of optimized navigation trajectory
Establish the following environment according to Tables 1 and 2, simulate its navigation trajectory under turning maneuvers at 30∘, 60∘ and 90∘, and compare the results obtained from the two algorithms, as shown in Figs 17 to 19 and Table 3.
The following two conclusions can be drawn from the experimental results:
The improved fusion algorithm generates navigation trajectories that are closer to the global path. By comparing the distances between the trajectories and the turning points, it is evident that the optimized algorithm produces trajectories that are closer to the turning points, thereby improving the deviation of the trajectories. Under the current experimental conditions, the optimization range can reach from 28.1% to 37.8%. The effectiveness of the improved algorithm becomes more pronounced as the angle of the USV turning manoeuvre increases. The improved fusion algorithm guides the USV to initiate the turning manoeuvre at a later moment, allowing for larger rudder angles during the turning process. This leads to a higher turning rate and further enhances the potential of the USV’s turning manoeuvre. The improved algorithm still maintains the control of the heading of the terminal USV. Under the above simulation conditions, the course error of the USV is controlled within 6∘.
In order to comprehensively verify the effectiveness of the improved algorithm proposed in this paper, referring to the experimental basis in Section 4.3, this experiment is set, assuming that the maximum speed of the USV is 9 kn, the expected course of the target position is 0∘, and the expected speed is 4 kn, and simulating that three USVs pass through a narrow passage, and three USVs cross each other near the narrow passage, forming a more complicated situation. After passing through the narrow passage, three USVs need to avoid five fixed obstacles and reach the target position at the expected course and speed. The experimental results are shown in Figs 20 to 23.
From Figs 20 to 23, it can be seen that USVs successfully reach the target position at the expected speed and heading in this complicated situation, and all USVs keep a safe distance during the whole navigation process.
Conclusion
In this paper, the traditional fusion algorithm is improved, and the cooperative strategy in reference [23] is also improved to realize the navigation of USV formation in complex environment, and the course and speed of USV at the target position can be controlled. In addition, through the improvement of the algorithm, the track error of USV during turning maneuver is reduced and the navigation efficiency is improved. Compared with other A* and DWA fusion algorithms described in the introduction, the optimization algorithm in this paper further improves the formation application of the algorithm without losing the advantages of the algorithm itself, making it closer to the actual scene in the subsequent research experiments, and providing a more reasonable and efficient solution for unmanned intelligent navigation of USVs in complex waters.
However, it should be noted that this improvement is based on simulation experiment results, and there is still a certain gap between the improved USV motion model and the actual USV motion. In the meantime, the algorithm itself has certain optimization space to improve performance. Additionally, the simulation environment model is not comprehensive enough, and the analysis of algorithm efficiency and applicability in various environments is not sufficiently comprehensive. These problems will be further solved and improved in the future research, so as to evaluate the improvement effect of the algorithm more deeply. In the following research, the motion model of USV corresponding to DWA algorithm will be described more accurately to make it close to the real motion characteristics of USV, and the algorithm will be introduced into the entity USV, and the algorithm in this paper will be verified and evaluated through navigation experiments in actual waters.